
一种紧凑型无配重式X-Y天线座的结构设计*
2018-05-09 01:44:19刘晓明刘国辉
电子机械工程 2018年1期
李 果,刘晓明,刘国辉
(中国电子科技集团公司第三十九研究所, 陕西 西安 710065)
引 言
天线座是天线的支撑和定向装置,在伺服系统控制下,引导天线准确地捕获和跟踪目标,其机械性能直接影响天线的射频特性和伺服功能。
传统的天线座为方位-俯仰(A-E)型结构,A轴为铅垂状态,E轴位于A轴上方,呈水平状态,通过两轴的转动,天线波束可以指向整个空域。但当目标仰角趋于天顶时,方位角速度趋近于无穷大,而A轴速度不可能无限增加,因此当目标进入“盲锥区”时,A-E型天线座无法跟踪[1]。
将A-E型天线座的E轴转到水平位置,这时天线座的“盲锥区”就转移到地平线附近,能够实现天线的过顶跟踪,这种天线座被称为X-Y天线座,它的2个旋转轴分别称为X轴和Y轴,均为水平配置,且互相正交,2个轴只需旋转180°就能够覆盖整个空域,因此不需要高频旋转关节、汇流环或电缆卷绕装置[2]。
目前常见的X-Y天线座主要有全配重构型、无配重构型和X轴虚轴构型[3]。全配重型天线座体积和重量较大,转动惯量大,结构松散;无配重型天线座传动末级一般采用开式齿轮传动,齿隙较大,天线过顶时易出现振荡;X轴虚轴构型结构较为复杂,可靠性差。这些构型对于低转速、小口径的X-Y天线座都不够实用。
本文给出了一种轻小型X-Y天线座结构,克服了上述3种天线座结构松散、回差大、结构复杂、可靠性低等缺点,很好地满足了某低空微小卫星地面遥感接收系统的要求。
1 天线结构系统简介
某轻小型天线结构系统如图1所示,主要由天线反射体、天线座、底座3部分组成。反射面口径D= 0.4 m,极化方式为圆极化。天线结构要求重量轻、体积小,便于携带运输,同时在工作频段可以实现某低空极轨微小卫星的程序跟踪,并保证跟踪精度。
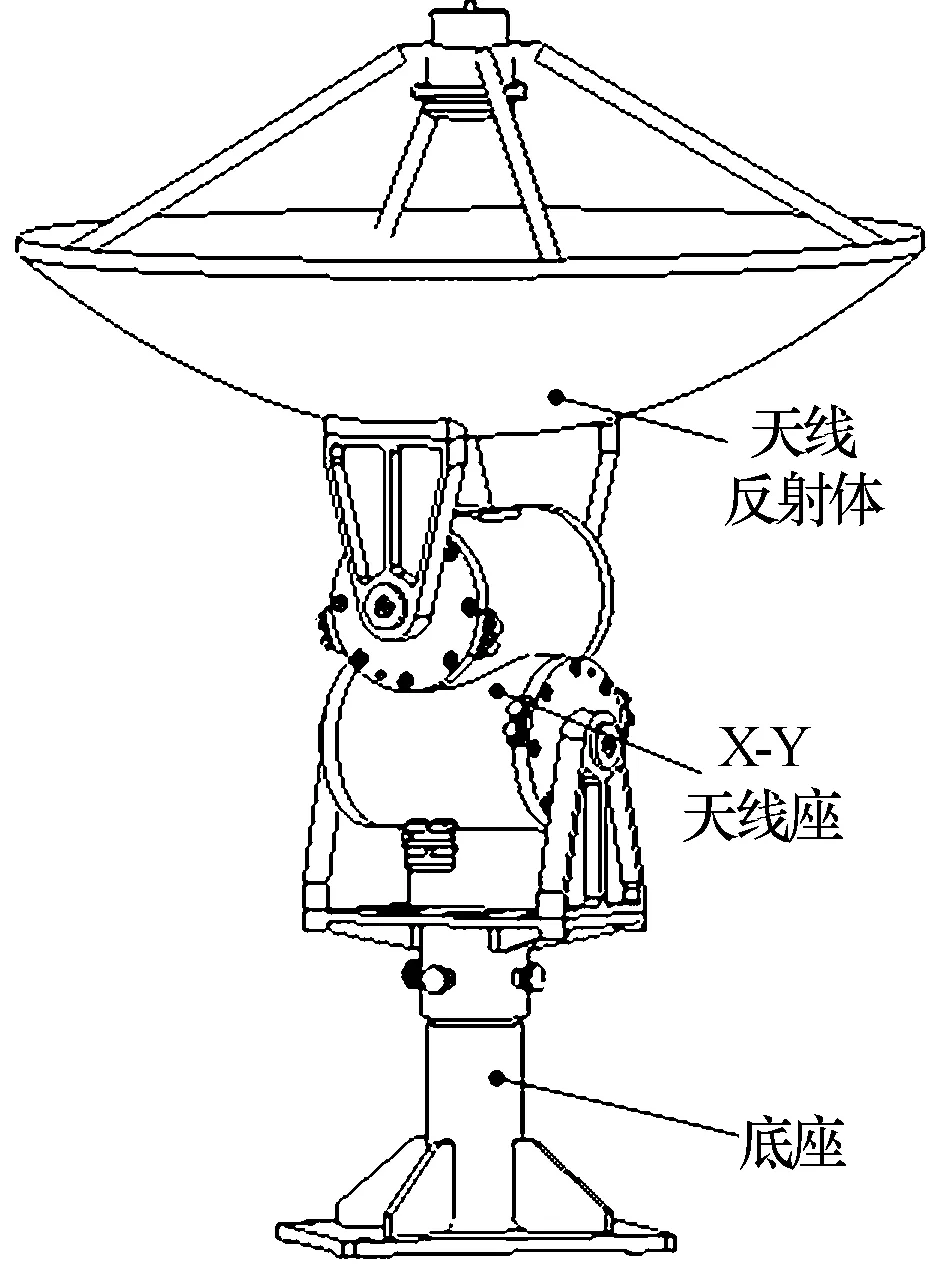
图1 天线结构系统
为了减轻天线自重,同时减轻天线座的负载,实现轻量化设计,天线反射体中反射面由碳纤维-铝蜂窝复合材料制成,馈源撑杆由芳纶复合材料制成,经过电气仿真可以达到指标要求。
天线的跟踪目标是极轨卫星,需要天线过顶跟踪且不丢失目标,常见的过顶方法有:为A-E型天线座增设第3轴,将A-E型天线座安装在倾斜机构上,A-E型天线座程序过顶以及采用X-Y型天线座[2]。前3种方法都基于A-E型天线座,不同程度地增加了伺服机械传动的难度,如第1种和第2种方法增加了结构设计的制造难度,且结构更加松散,第3种方法则需要满足一定的条件。对于第4种方法,本文提出了一种全新的X-Y天线座结构构型,很好地满足了设计要求。
X-Y天线座是文中天线结构系统的核心部件,其外形如图2所示。该天线座的核心是通过正交支套将Y轴转动部分和X轴转动部分联接在一起。正交支套上、下套筒两端的支臂(包括电机支臂和编码器支臂)与正交支套可以相对转动,上支臂底面朝上与天线反射体连接,下支臂底面朝下与底座托架连接。
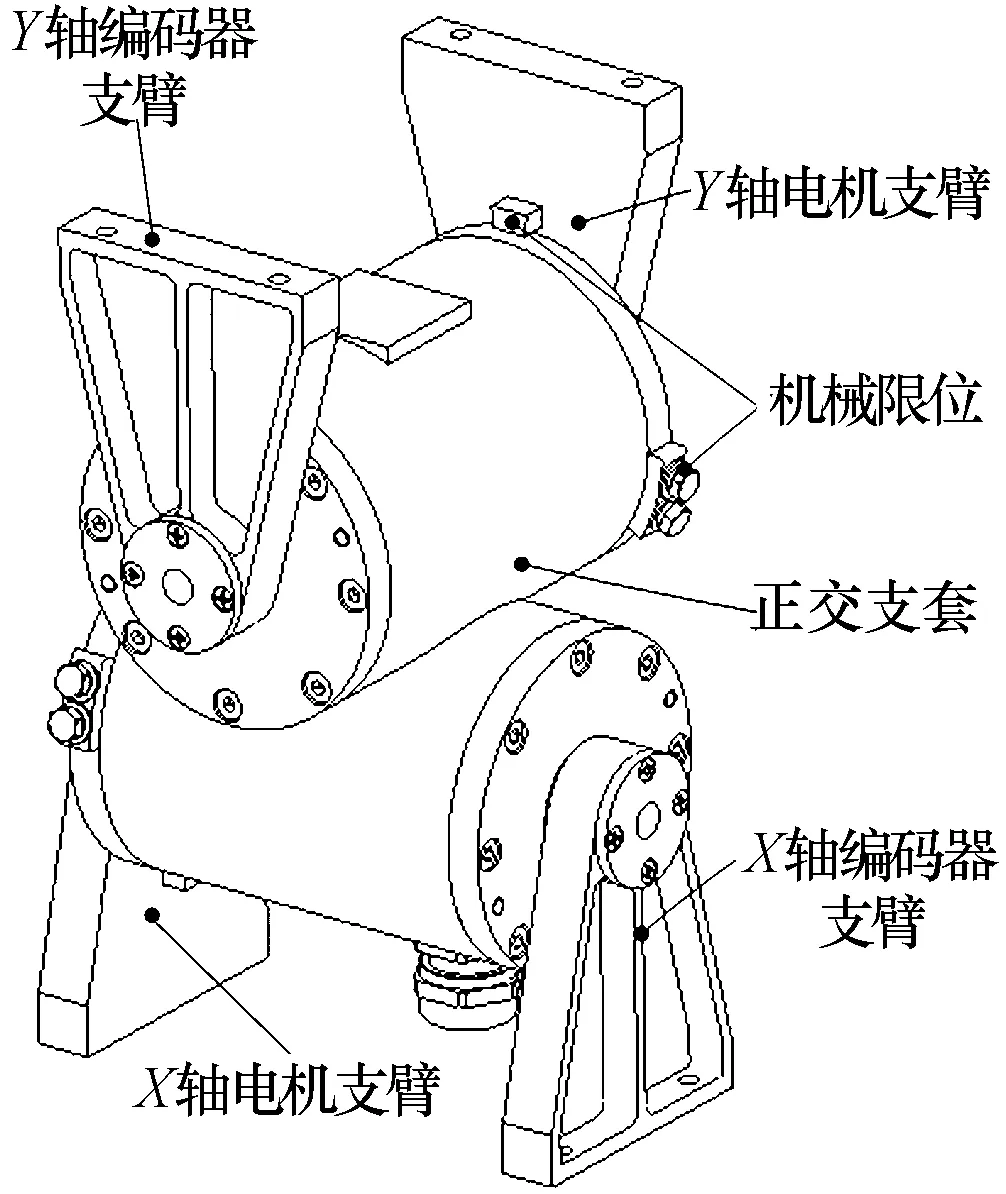
图2 X-Y天线座外形图
当Y轴电机转动时,上臂旋转,带动天线作Y轴转动。当X轴电机转动时,由于支臂固定,正交支套转动,这样天线就绕X轴转动。两轴分别有独立的传动系统和测角系统,转动范围为0°~180°。
2 X-Y天线座的结构特征
X-Y天线座由正交支套、电机、减速器、编码器、支臂(4件)、随动轴、端盖等组成,如图3所示。为了实现互换性和提高经济性,两轴采用了相同规格的传动装置和测角装置。
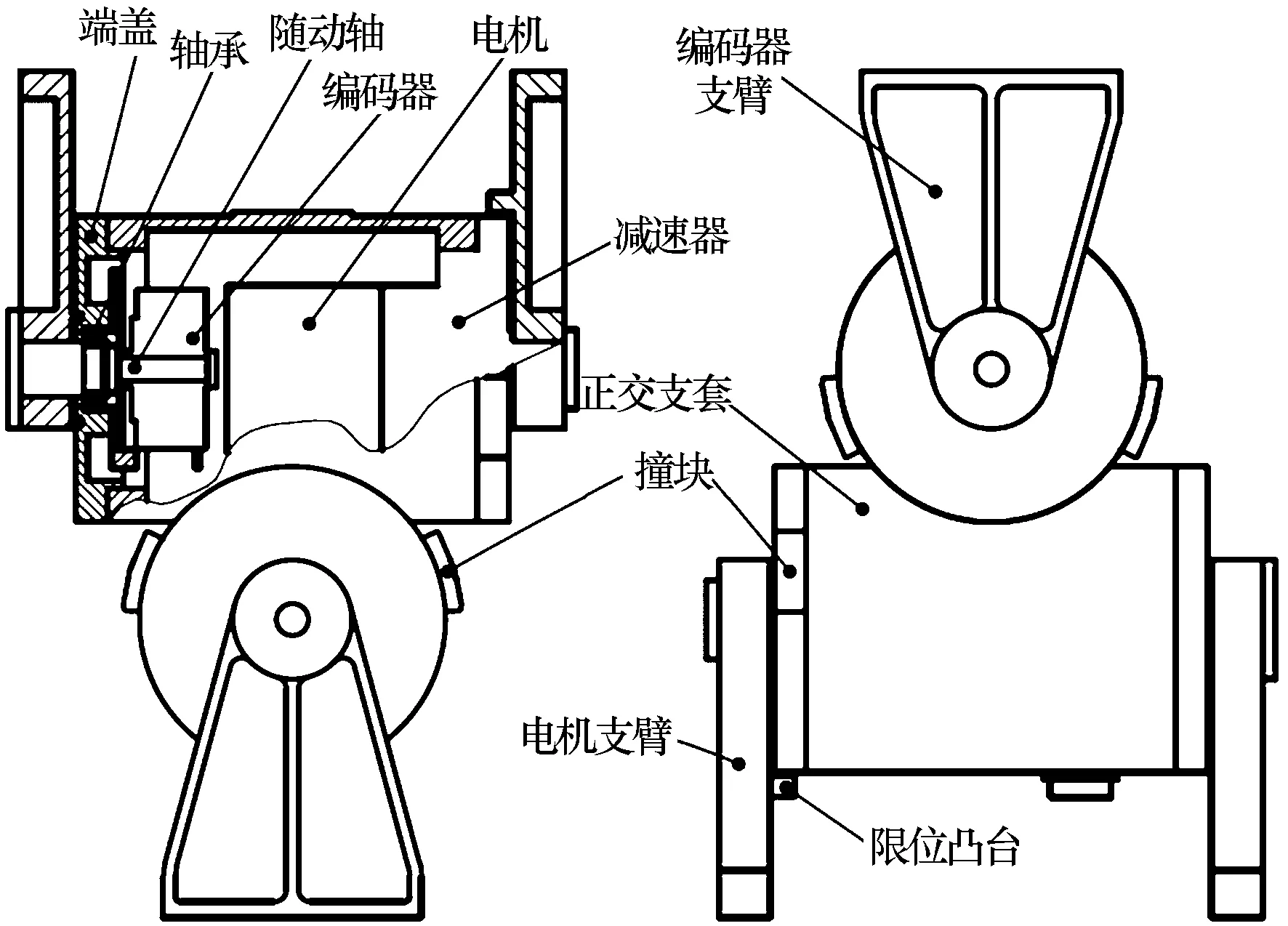
图3 X-Y天线座结构
正交支套左右几何对称,焊接成形,焊后进行精加工以保证轴线之间的正交性。顶面平台台面称为基准面,与两轴线严格平行,调试时作为参考平面。
正交支套的上、下筒左右两端分别安装传动装置和测角装置。传动装置由步进电机和谐波减速器组成。步进电机低转速下输出扭矩大,适用于低速大扭矩的使用场合。谐波减速器与行星减速器相比体积小,重量轻,传动比大,回差小。重量轻则偏心力矩小,电机所需功率也小。传动比大则输出扭矩大,也能减小电机所需功率。高精度谐波减速器的齿隙很小,甚至可以做到零背隙,因而回差也小[4],减小了天线过顶时由于偏心力矩的方向改变而导致的天线晃动量,保证了天线系统的跟踪性能。
减速器法兰用螺钉固定在正交支套上,其输出轴与电机支臂采用型面连接方式,端部采用轴端挡圈和螺钉压紧,保证了同轴性。减速器输入端连接步进电机。减速器法兰周向对称安装了撞块,用螺钉固定在减速器法兰上,在设定角度与电机支臂上的限位凸台接触,构成了天线座的机械限位。
正交支套的另一侧是一套轴承装置,采用了深沟球轴承。端盖用螺钉固定在正交支套端面,轴承盖在正交支套腔体内并用螺钉与端盖连接。随动轴大端法兰固定在编码器支臂上,小端与编码器连接,使得编码器与随动轴同步转动。编码器弹片周向用螺钉固定在轴承盖上,其弹性变形可以补偿同轴度偏差。编码器将天线转动角度实时反馈给控制系统控制电机,实现角度闭环控制,构成天线座的软件限位。
X轴与Y轴的转动原理相同,但转动的传递路径不同。Y轴的传递路径为电机(轴)→减速器(轴)→电机支臂→天线反射体→编码器支臂→随动轴→编码器(转子),而X轴的传递路径为电机(壳体)→减速器(壳体)→正交支套→端盖→轴承盖→编码器(壳体)。
正交支套与减速器、端盖等形成了一个密闭腔体,可有效保护电机、编码器等精密元器件。轴承装置采用“迷宫式”密封结构,编码器支臂和端盖分别有同心的凸缘和沟槽。正交支套底部为电缆出线口,安装电缆防水接头将电缆线束可靠固定,也起到了密封作用。
天线座转动时,内部元器件相对正交支套不动,腔体内部电缆不发生卷绕。X轴的转动范围为0°~180°,因此不需要专门设计电缆卷绕装置。
由于传动系统未采用开式齿轮传动,电机、减速器、编码器均安装在腔体内部,全寿命周期免维护,因此天线座可靠性较高。
3 传动系统参数计算
设计要求:X轴和Y轴转动范围0° <Φ< 180°,两轴转速ω< 0.087 rad/s,两轴角加速度α< 0.087 rad/s2,天线在8级风下能够保精度工作。
转动范围由设计保证,为防止支臂之间、天线座与天线反射体或底座之间发生干涉,需要保证足够的两轴线间距和支臂高度,同时结构要尽可能紧凑,转动范围满足要求。
所选步进电机输出转速n= 100 r/min时,输出转矩M″= 0.3 N·m。所选谐波减速器速比i= 101,输出力矩M′= 20 N·m,天线转速ω′ = 6n/i= 6 × 100/101 = 0.103 rad/s >ω,满足要求。
负载力矩主要由偏心力矩、风力矩、惯性力矩、摩擦力矩组成。由于X轴在Y轴之下,力臂e较长(0.2 m),偏心质量m较大(5 kg),转动惯量J也较大(0.8 kg·m2),因此按X轴的情况进行计算和选型。
偏心力矩在X轴位于0°或180°时最大,最大值M1=mge= 5 × 9.8 × 0.2 = 9.8 N·m。惯性力矩M2=Jα= 0.8 × 5 × π/180 = 0.07 N·m。
采用简化计算方法计算X轴上的风力矩M3[5]。8级风的计算风速V= 24.2 m/s,天线反射面上的风载荷为:
FA=CAqA
FC=CCqA
MO=CMqAD
式中:FA为轴向力,N;FC为横向力,N;MO为风力矩,N·m;CA、CC、CM分别为轴向力系数、横向力系数、风力矩系数,它们与风向角θ有关;q为动压头;A为天线反射面面积。
动压头q=V2/1.6 = 366 N/m2,天线反射面面积A= 0.25πD2= 0.13 m2,qA=366 × 0.13=47.6 N。
只需计算2种工况(风向角θ分别为60°和120°)即可得到最大风力矩。θ= 60°时,CA= 1.6,CC= -1.4,CM= -0.09。
反射体上的风载荷为:
FA=CAqA= 1.6×47.6 = 76 N
FC=CCqA= -1.4×47.6 = -67 N
MO=CMqAD= -0.09×47.6×0.4 = -1.7 N·m
折算到X轴上的风力矩为:

风向角θ= 120°时,CA= -0.2,CC= 0.1,CM= 0.14。
反射体上的风载荷为:
FA=CAqA= -0.2×47.6 = -9.5 N
FC=CCqA= 0.1×47.6 = 4.8 N
MO=CMqAD= 0.14×47.6×0.4 = 2.7 N·m
折算到X轴上的风力矩为:
M3″ =MO+eFC=2.7+0.2×4.8 = 3.7 N·m

摩擦力矩M4主要来自于轴承和编码器旋转过程的摩擦,由于均为滚动摩擦,可忽略不计,即M4= 0。
综合起来的总负载力矩为:
因此,减速器的输出力矩满足要求。折算到步进电机,所需驱动力矩为:
式中:η为谐波减速器的效率。电机的驱动力矩满足要求。
从以上计算过程可以看出,风力矩和偏心力矩构成天线座的主要负载力矩,因此天线反射面多采用镂空网板结构或碳纤维铝蜂窝夹层结构。
4 结束语
文中的天线座属于无配重式X-Y天线座,其结构紧凑,重量轻,体积小,简单易制,密封性好,适合于转速较低、口径较小的跟踪接收设备,克服了以往X-Y天线座结构松散、跟踪精度低、结构复杂、可靠性差等问题。针对不同的使用要求,可对这类天线座进行适应性设计:对于较大口径天线,应增加电机断电抱闸功能,以保护设备和人身安全;为了充分发挥电机的效能,可在谐波减速器之后串接行星减速器,以增大传动比,获得更大的输出扭矩;也可以在支臂与端盖之间加装电气限位开关,达到三级限位保护。
[1] 吴凤高. 天线座结构设计[M]. 西安: 西北电讯工程学院出版社, 1975: 20-21.
[2] 李小平. 天线座过顶跟踪[J]. 火控雷达技术, 1993(22): 51-56.
[3] 李建军, 贾彦辉. X-Y型天线座构型设计[J]. 电子机械工程, 2014, 30(5): 37-40.
[4] 龚振邦, 陈守春. 伺服机构传动装置[M]. 北京: 国防工业出版社, 1980: 14-29.
[5] 成大先. 机械设计手册[M]. 北京: 化学工业出版社, 2002.
猜你喜欢
哈尔滨工程大学学报(2023年8期)2023-08-28 03:36:54
铁道通信信号(2019年10期)2019-11-25 09:40:54
无损检测(2019年7期)2019-07-25 09:42:22
军事文摘(2018年24期)2018-12-26 00:57:40
指挥控制与仿真(2018年3期)2018-06-11 12:37:04
水利规划与设计(2017年8期)2017-12-20 08:24:05
系统工程与电子技术(2016年11期)2016-11-11 08:22:53
科技资讯(2016年13期)2016-05-30 03:35:08
水利科技与经济(2016年2期)2016-04-21 09:32:26
现代商贸工业(2016年35期)2016-04-09 06:59:58
