灾后救援机器人的机械结构设计
2018-05-09 06:41:18卢孔宝陈华勇
浙江水利水电学院学报 2018年2期
卢孔宝,陈华勇
(浙江水利水电学院 机械与汽车工程学院,浙江 杭州 310018)
随着全球气候的变化以及人为破坏环境的影响,近年来地震等自然灾害频频发生,这类灾难造成了人员伤亡、财物被毁等巨大损失.然而灾难导致的路面坍塌、房屋摧毁、山体滑坡等现象,阻碍了救援人员的救援,同时也给救援人员的人身带来了安全隐患[1].采用救援机器人进行辅助搜救、发送受灾画面、提供灾情数据是目前常见的一种有效手段.因灾后环境恶劣、地面复杂,对救援机器人的越障能力和机器人的适应能力都有很高的要求[2].机器人要完成穿越废墟、自主搬运障碍物、发送所需信息等工作,从而给救援提供有效方案制定和争取宝贵救援时间提供参考和帮助.因此研发适应复杂恶劣环境的救援机器人具有一定现实意义.
1 传统救援机器人行走结构分析
现有传统的救援机器人行走机构主要有轮式、履带式、腿足式等.这些行走机构在复杂道路环境下都有各自的优点,同时也存在不足之处,选取了常见行走机构对地面适应性、越障能力、经济性和加工装配方面等进行分析,以此为依据提出优化设计的方案.
1.1 轮式行走机构
轮式行走机构机械机构相对简单,通常适应在道路相对平坦的场合,其越障能力主要取决于轮子直径和电机驱动力,由于其行走主要依靠轮子与地面的线接触,其适应能力相对较差,但该行走机构具有加工装配比较方便,费用低廉等特点[3].
1.2 履带式行走机构
履带式行走机构其行走主要依靠履带与地面的面接触,对于泥泞道路、凹凸不平路面、小程度的坍塌路都能适应,其适应能力相对较好,越障能力也大大优于轮式行走机构,但履带行走机构底盘高度会影响其越障能力.该行走机构加工装配相对简单方便,费用也适中.
1.3 腿足式行走机构
这种行走机构灵活性很强,适合复杂的道路,但由于其结构重力集中在腿足上,容易被松软地面和废墟堆杂物中陷住、卡住,且行走时要随时调整机构重心达到平衡,同时这种行走机构制造成本较高,装配要求较高.
综合上述几种常见行走机构,在适应性、越障功能、制造成本等方面进行了综合评价(见表1).
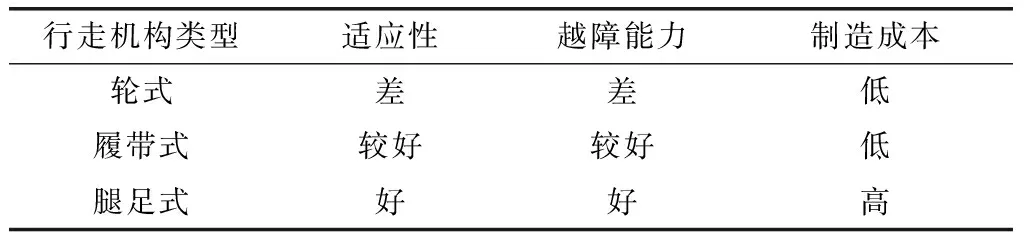
表1 常见行走机构综合评价指标
通过常见行走机构综合评价指标,发现履带式的行走机构相对适合灾后环境中行走,但还存在一定缺陷,需要在传统履带式行走机构的基础上进行优化设计,提出了行走机构的本体进行伸缩可变,一定程度上可避开及其恶劣的道路环境,由此提高行走机构的越障能力和适应性.
2 灾后救援机器人结构设计
2.1 救援机器人整体方案设计
为了争取救援时间,救援机器人需要快速、平稳的通过救援通道,有时甚至需要穿越河道、坍塌路面等复杂道路.为适应复杂路况拟设计的机器人采用履带式行走机构,为了便于灵活操作两侧履带各设电机驱动,便于实现差速转向,行走机构本体设计成可伸缩式,并设计顶升机构,使行走机构伸缩更灵活同时减轻伸缩电机负载,达到根据路面情况随时调整行走机构尺寸的功能,提高机器人对复杂路面的适应性.
救援机器人除能通过复杂路面外,更重要的是利用机械手开展救援工作,机械手可实现360°回转,完成快速定位、抓取、救援等工作.整体设计方案(见图1).
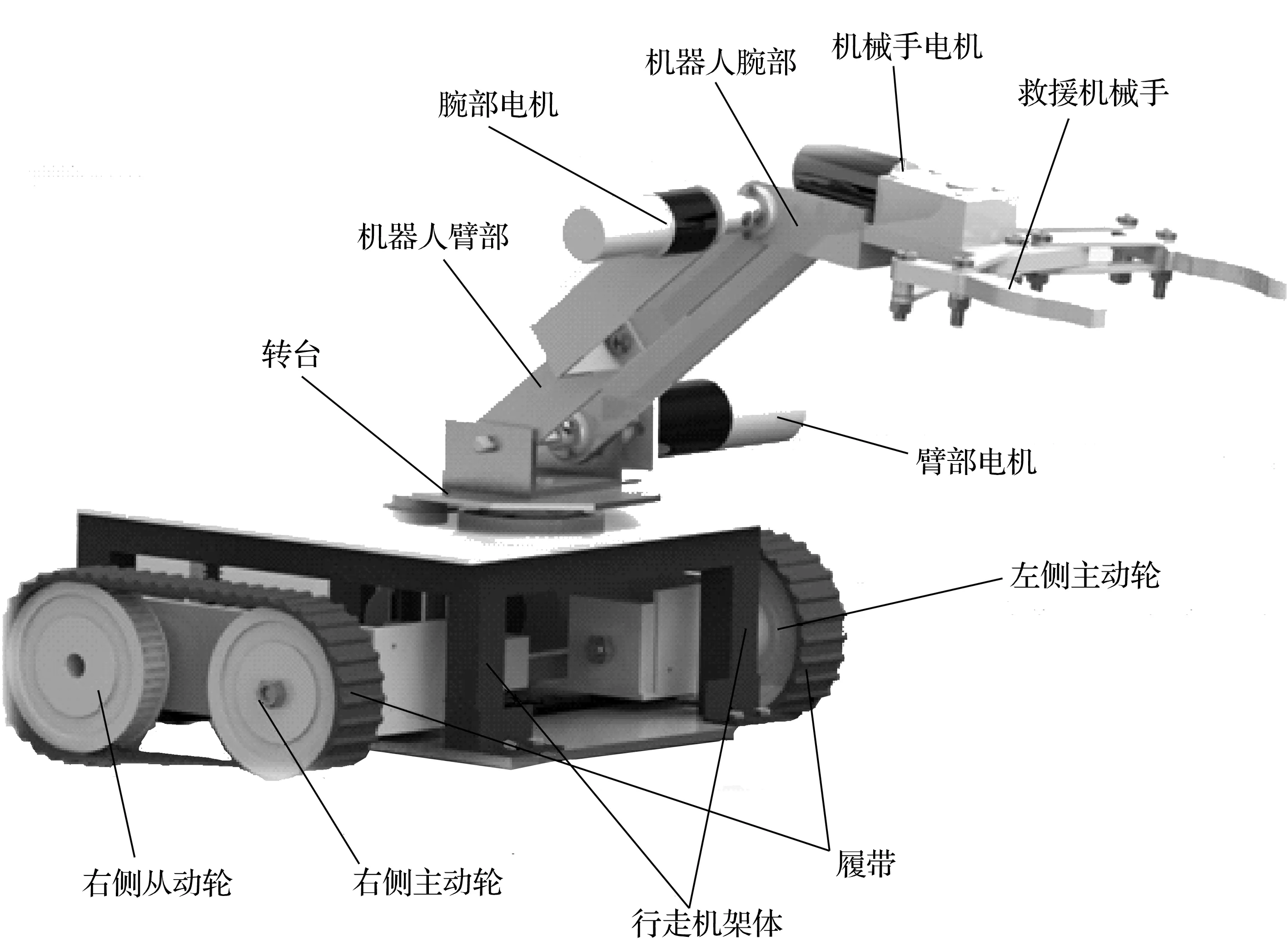
图1 灾后救援机器人整体设计图
2.2 机器人行走车架体设计
机器人行走车架体主要由车架伸缩装置、行走装置顶升装置等组成车架伸缩装置主要由齿轮齿条啮合机构实现,电机带动齿轮转动,齿轮与齿条1、齿条2啮合,并带动两齿条反向直线运动,实现行走机构的伸缩功能,为保证传动的稳定性,在齿条上设有依靠导向块,保证两齿条移动的平稳性[4].实现左右履带以行走机构为中心匀速伸缩,确保机器人在复杂道路上保持平稳.
车架伸缩装置的两侧为行走装置,其设有两组同步带轮,每组带轮上安装同步齿形带,两组前侧主动轮由电机带动实现行车机构的前进、后退、差速转弯等功能.
在平整路面车架伸缩装置可轻松的将车体两侧车轮推出,但如机器人处于复杂路面时,由于地面不平整、不规则,行走装置左右移动的阻力大大增加,很难实现车架伸缩功能,为解决这一技术难题,在车体底部设计顶升装置,依靠电机带动顶升齿轮,顶升齿轮与顶升齿条啮合,顶升齿条将车体顶升,减少履带与地面的摩擦阻力,从而轻松实现车架伸缩功能.机器人行走车架体建模及结构(见图2).
2.3 救援机械手的设计
救援机械手在该救援机器人中的作用主要是搬除障碍物、传递救援物资等作用,因救援特殊性所需的机械手需具备实现快速抓取不同形状、不同规格物体等功能[5].救援机械手采为“夹持式”抓取,手指圆弧形,其结构形式为两平行四杆机构,通过扇形齿轮传动,实现手抓的夹持与分开,从而完成救援工作.救援机械手建模及结构(见图3).
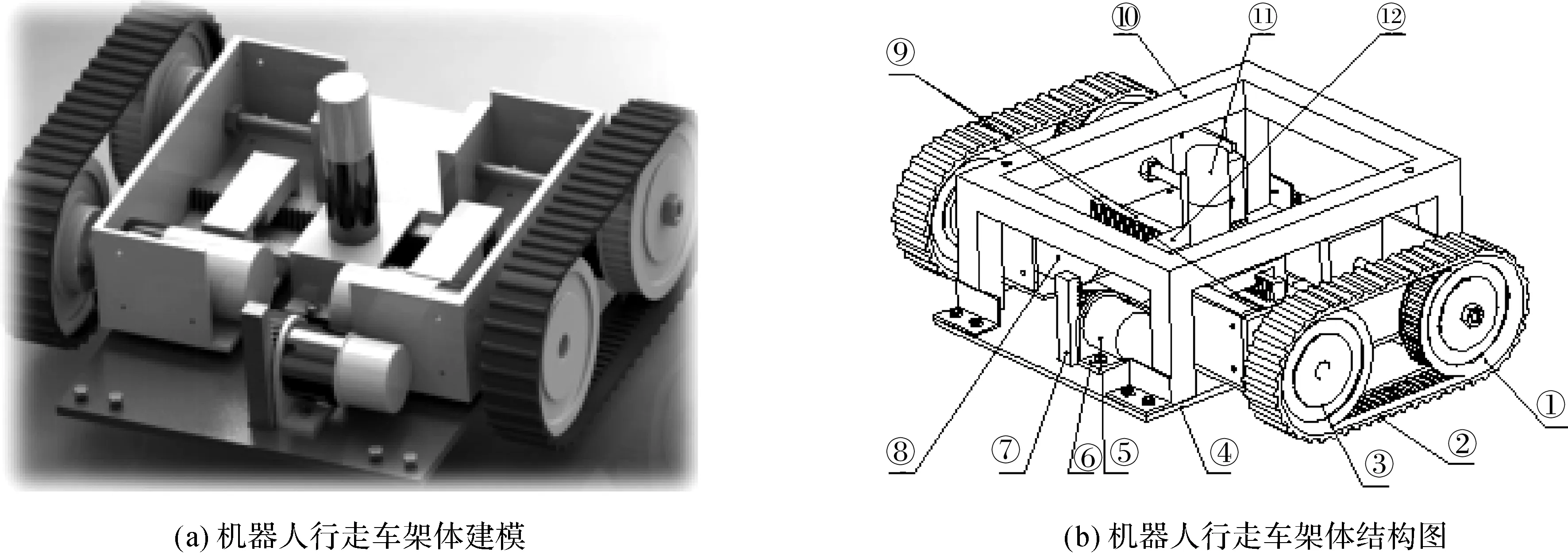
①-右侧从动轮;②-右侧主动轮;③-履带;④-底盘;⑤-抬升电机;⑥-抬升电机安装板;⑦-顶杆;⑧-左侧主动轮电机;⑨-伸缩齿条;⑩-行走机架体;-伸缩装置电机;-定位块图2 机器人行走车架体
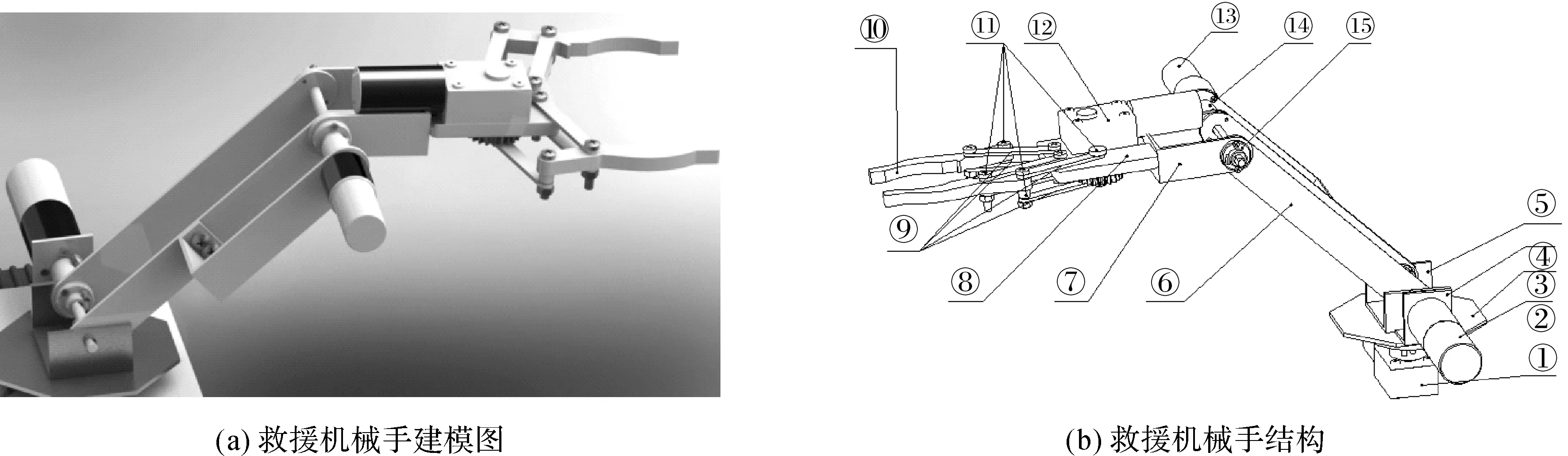
①-转台电机;②-腕部电机;③-转台;④-臂部电机安装板;⑤-机械手臂连接板;⑥-机器人臂部关节;⑦-机器人腕部关节;⑧-机械手固定块;⑨-手指关节连杆;⑩-手指关节;-连接件;-机械手电机;-腕部电机;-联轴器;-调整块图3 救援机械手
救援机械手主要由转台、腕部关节、臂部关节、机械手指等组成,均有电机实现其关节的运动.可实现360°无死角的救援工作开展.由转台、腕部关节实现大致定位,调整臂部关节实现精确定位,机械手指实现抓取、救援工作.
救援机械手动作分析,转台与链接底板相连,通过电机可实现360°回转,腕部关节一侧转台铰接另一侧与臂部关节铰接,电机传递动力可实现机械手臂大幅度的调整方位.臂部关节的另一侧与机械手指实现固定连接.电机传递动力可实现机械手的微调实现较高精度的定位.救援机械手指通过扇形齿轮、连杆机构实现张开和收拢.
2.4 驱动电机扭矩计算
灾后救援机械手各个关节均有电机控制其运动,为使救援机械手能有效抓取救援取物,故电机的驱动力需要进行计算.其中救援机械手指和救援机械手腕部电机相对重要需根据计算选型,均可参照腕部电机的计算方法进行选型即可[6].
(1)救援机械手指驱动电机计算
救援机械手夹紧力约束主要是消除物件在手指中的移动,从而判断手指对物件的约束是否可靠时,一般要考虑手指与物件的接触状态夹紧力的大小、方向和作用点等[7].机械手指关节部分结构(见图4).
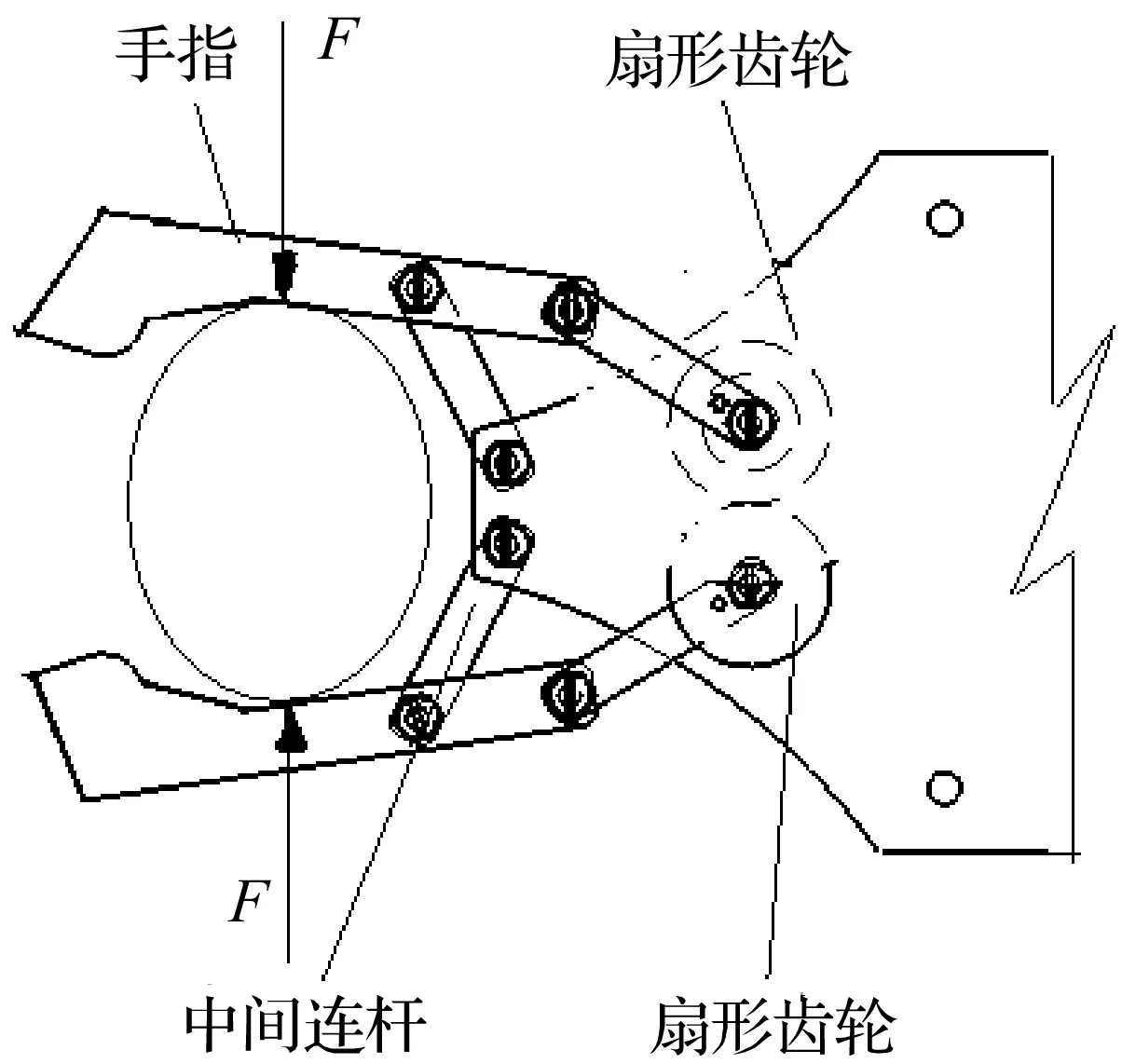
图4 机械手指关节部分结构示意图
所设计的救援机械手两手指内侧之间距离:L=30 mm;扇形齿轮半径:R扇=20 mm;支点与手顶端距离为:b=40 mm.预所夹持最大重物:1 000 g,即G=20 N;
查手册得金属与木制物品之间静摩擦系数:f=0.5;
救援机械手指所需的夹紧力:
(1)
根据公式:
F轴×R扇=F×b
(2)
F轴=40 N,设F′为齿轮圆周力
F×sinγ×cosγ=F轴
(3)
解得F′=250 N.
所设计的扇形齿轮半径R扇=0.02 m
救援机械手指驱动力为:
M=F′×R扇=5 N·m
(4)
(2)救援机械手腕部电机驱动力计算
救援机械手手腕电机驱动力计算需考虑众多因素,查机械设计手册,机械手臂腕部驱动驱动力矩可按式(5)进行计算:
M驱=M惯+M偏+M摩
(5)
其中:M驱—驱动手腕摆动的驱动力矩,N·cm;
M惯—惯性力矩,N·cm;
M摩—手腕处与前臂端部的摩擦阻力距,N·cm.
①手腕加速运动时产生的惯性力矩:
设手腕摆动是的角速度为ω,启动所用时间为Δt,则:
M惯=(J+J1)ω/Δt
(6)
其中:J—参与手腕摆动部件对转动轴线的转动惯量,N·cm;J1—工件对手腕摆动轴线的转动惯量,N·cm.
②手腕转动件和工件的偏重对转动轴线所产生的偏重力矩:
M偏=G1e1+G2e2(N·cm)
(7)
其中:G3—手腕摆动件的重量,N;
e3—手腕摆动件的重心到摆动轴线的偏心距,N.
当工件的重心与手腕的摆动轴线重合时,则:G1e1=0
③手腕摆动轴在轴颈处得摩擦阻力距M摩与选用的各装置类型有关.
综合式(5)~式(7)的力矩计算,救援机械手手腕电机驱动力12 N·cm.
3 救援机器人运行与实验
救援机器人进行了样机制作(见图5),并对其进行了多次运行与调试,救援机器人可轻松实现行走装置的伸缩功能,运行平稳,转向灵活,适应在坑洼路面、废墟堆等复杂路面前行[8].动力源采用24 V直流电机,行走速度可达18 m/min,机械手可抓取不同规格的圆柱体、长方体等物.抓取最大重量可达1 kg,抓取圆柱体直径范围15~105 mm,抓取长方体规格15 mm×15 mm~95 mm×95 mm,伸缩行程最大可达85 mm,伸缩功能最长耗时1.5 s.救援机器人各种救援姿态(见图6).

图5 灾后救援机器人实物图
4 结 语
本文对灾后救援机器人的机械结构进行了设计,并试制了样机进行了调试和实验,实验结果表明所设计的救援机器人道路适应性强,运动灵活,机械手可抓取不同形状、多种规格的物体.该救援机器人可进入灾后道路复杂的地段,为灾后救援、搜寻被困人群等提供帮助,加装摄像头等功能可传递灾后现场照片,为进一步救援方案的制定和实施提供数据.对同类救援机器人的开发研制具有一定借鉴意义.
参考文献:
[1] 郑书华,吴明昊,黄叶浩,等.新型可变距式救援机器人结构设计及分析[J].制造业自动化,2013,35(8)1-2,7.
[2] 杨俊驹,林 睿,王振华,等.轮式移动机器人运动控制系统研究与设计[J].现代电子技术,2016,39(2):22-27.
[3] 赵化成,刘 武,潘聪华,等,重力势能驱动的自行避障小车设计与制作[J].浙江水利水电学院学报,2016,28(6):73-76.
[4] 陶来华,卢孔宝.一种机械手的运动机构[P].中国专利:201420370927X,2014-12-24.
[5] 李世光,申梦茜,王文文,等.一种Mecanum轮式移动平台增量PID控制系统设计[J].山东科技大学学报,2016,35(1):86-96.
[6] 邱宣怀,郭可谦,吴宗泽,等.机械设计[M].4版.北京:高等教育出版社,1997.
[7] 吴丽华,陈豪鹏,祝铭力.基于Solidworks的爬楼送水小车设计与仿真[J].浙江水利水电学院学报,2017,29(4):79-83
[8] 李起伟,张立亚.矿山应急救援机器人全局路线规划的研究[J].煤炭技术,2016,35(8):249-251.
猜你喜欢
物流技术与应用(2022年5期)2022-06-17 06:02:34
农业装备与车辆工程(2021年8期)2021-08-28 09:49:16
装备制造技术(2021年4期)2021-08-05 07:39:40
南方农机(2021年1期)2021-01-20 11:41:46
钟表(2020年5期)2020-11-06 06:36:20
港口装卸(2020年3期)2020-06-30 10:37:54
小主人报(2018年21期)2018-11-07 03:50:02
中国自行车(2018年4期)2018-05-26 09:01:43
快乐语文(2016年10期)2016-11-07 09:44:57
汽车零部件(2014年5期)2014-11-11 12:24:34