
高精度无刷直流电机模糊控制系统的研究及FPGA实现
2018-05-05 05:42韩团军
现代电子技术 2018年9期
韩团军
摘 要: 为了解决无刷直流电机控制准确性低和不稳定性问题,设计实现了一种高精度无刷直流电机模糊控制系统,以FPGA作为设计的硬件处理平台。硬件电路设计主要有FPGA外围电路、驱动电路和位置检测电路。实现了一种新的参数自适应模糊PID控制算法的闭环控制系统的硬件,该算法能有效提高电机的控制能力和增强其动态特性。通过硬件平台验证该系统能够有效地抑制转矩脉冲,同时缩短了控制时间,提高了系统的稳定性。该设计具有一定的工程参考及应用价值。
关键词: 无刷直流电机; 模糊控制; FPGA; 模糊PID; 闭环控制; 转矩脉冲抑制
中图分类号: TN710?34; TP237 文献标识码: A 文章编号: 1004?373X(2018)09?0175?04
Abstract: In order to improve control accuracy and stability of the brushless DC motor, a high?precision fuzzy control system of brushless DC motor was designed, in which FPGA is taken as the hardware processing platform. The hardware circuits including the FPGA peripheral circuit, driving circuit and position detection circuit were designed. The hardware of the closed?loop control system of the new parameter adaptive fuzzy PID control algorithm was implemented. The algorithm can improve the control ability and dynamic characteristic of the motor effectively. The verification results of hardware platform show that the system can suppress the torque pulses effectively, shorten the control time, and improve the system stability. The design has a certain engineering reference and application value.
Keywords: brushless DC motor; fuzzy control; FPGA; fuzzy PID; closed?loop control; torque pulse restraint
0 引 言
随着工业技术的不断发展,无刷直流电机在工业中的应用越来越广泛,人们对无刷直流电机的控制时间和精度提出了更高的要求。传统的直流电机控制系统集成度低、硬件资源消耗较大,而且易受外界环境影响,难以实现复杂的算法。同时,常规的PID控制算法参数比较固定、控制精度也不高[1?3]。
根据现代工业的需要,本文设计实现了一种高精度无刷直流电机模糊控制系统,控制器采用体积小而且能实现复杂算法的FPGA芯片,控制算法采用一种新的参数自动随系统状态变化而变化的PID算法。运用硬件语言设计了控制中需要的各个模块,在Quartus Ⅱ软件下对各个模块进行验证,最后应用FPGA硬件平台对无刷直流电机模糊控制系统进行验证。通过实验数据分析,该系统能够有效地抑制转矩脉冲,同时缩短了控制时间,提高了系统的稳定性[4]。
1 直流电机硬件控制系统结构
该直流电机硬件控制电路主要由FPGA控制器、通信模块、逆变模块、三闭环控制模块等电路组成。整体的硬件系统如图1所示。

图1中FPGA控制器输出控制信号的方式为PWM,此PWM信号驱动三相全桥式逆变驱动电路控制电机的转相。三闭环PID模块中的位置检测信號通过间接的计算可以得到电机的转速。通过电流检测和位置检测信号以负反馈的方式接入去控制PWM的占空比,实现直流电机转速的精确控制。通信模块通过串口读取实际电机转动参数,并与上位机相连。
2 控制算法的设计与选择
根据相关原理分析传统控制算法的缺点,设计中采用速度检测电路双闭环的反馈控制系统。算法上采用模糊自定义PID。这种控制方法是把常规PID算法和智能模糊控制算法相结合的一种全新算法[5?6]。系统可以智能地线性调节参量。这样可以使输出的动态性能提高,同时可以增强抗干扰能力。
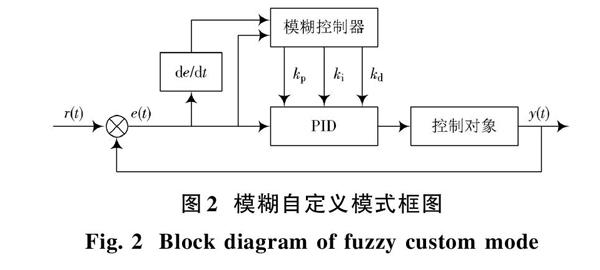
自定义模糊算法的PID模式框图如图2所示。
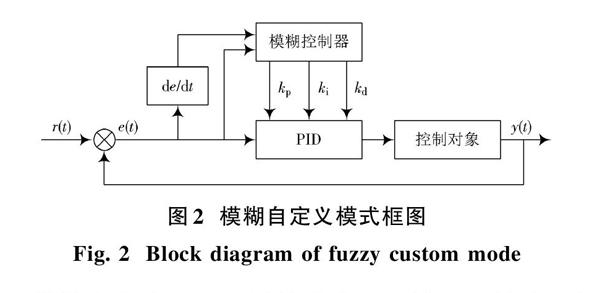
模糊自定义PID采用的模式为两输入三输出,输入为误差变化率[ec]和误差[e,]输出为[Δkd,Δki,Δkp。]采用重心法可以对输出参量进行模糊化处理,重心法可以使微小的输入变化都可在输出有较大变化,通过这个变化可以使系统的稳定性和灵敏度提高,模糊控制规则表在文献[1]中已经有详细的说明[7?9]。
三个参量决定的PID输出公式为:
3 参数自定义模糊自适应PID的软件设计
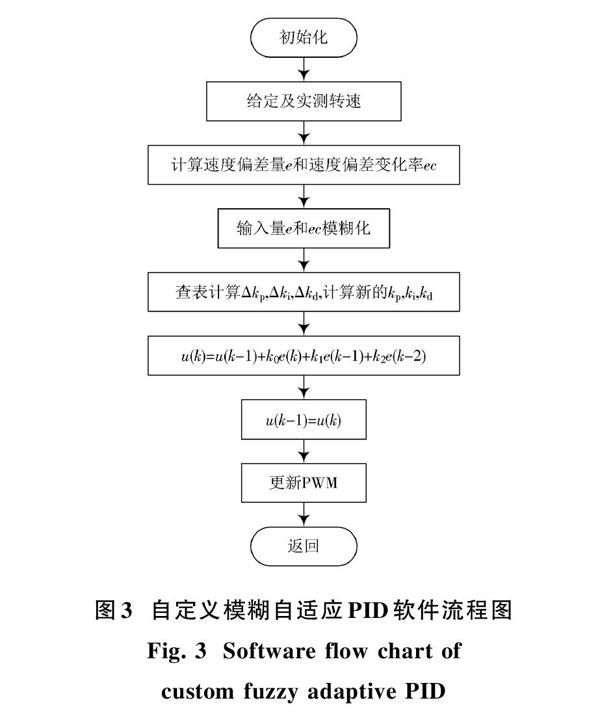
设计中首先实现传统的PID控制方法,在其基础上对参数进行模糊化,最终模糊自整定PID参数,[Δkp,][Δki,Δkd]通过查表法获得,把查表得到的值与上一次的[kp,ki,kd]参数值进行相加即可得到实际需要控制的PID参数,自定义模糊自适应PID软件流程图如图3所示。
4 系统的FPGA设计与实现
根据直流电机系统分析,基于FPGA控制系统的总体结构采用模块化编程。整体模块主要由PWM生成模块、PID模块、A/D采样模块、转速计数模块、换相模块等组成。相应的硬件设计流程如下:
启动程序时,各模块先初始化,接着根据霍尔信号电机启动,同时测量电流和位置信号;电机转动时,转速计算模块对电机的速度进行实时计算,把计算结果送入双闭环控制回路;控制模块的控制量是由接收转速计算模块和模块反馈的电机转速的电流值通过速度、电流调节器计算得到;PWM产生频率一定但是占空比不同的控制量来控制电机;控制量经过换相模块产生控制信号驱动电机旋转,达到对电机的闭环控制。设计中还设计了故障报警模块,当遇到电源不稳定系统则自动关闭。
5 仿真及硬件结果分析
5.1 仿真验证
设计中利用硬件语言设计了三环控制模块中的位置调节模块以及检测模块,最后对整体PID模块进行设计,同时生成了PWM模块。
通过Quartus Ⅱ软件可以对以上各个模块进行仿真得到不同模块波形。图4为位置采样控制模块的仿真波形,图5为速度检测模块的仿真波形。

5.2 编程下载硬件分析
系统设计中控制芯片选用Altera的CycloneIIIEP3C55F484C8可编程逻辑器件作为核心处理芯片,这个芯片内部资源比较大,可以实现复制算法控制系统,在软件工具QuartusⅡ环境下应用VHDL语言对各个模块进行设计实现。
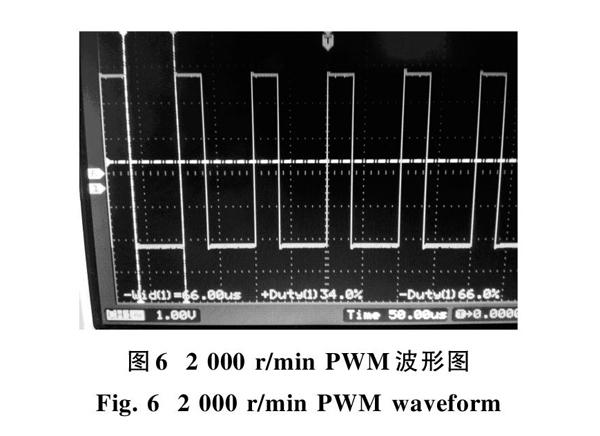
对整个系统设计进行硬件测试,得到不同转速下的PWM波形如图6,图7所示,可以看出输出结果比较稳定。
通过数据与图形分析得到,自定义算法在电机控制中输出在0.2以内可以达到稳定输出而且超调量和误差输出较小,系统有很好的电机转速控制功能,达到了工业设计要求。
6 结 语
本文实现了一种高精度无刷直流电机模糊控制系统,以FPGA作为设计的硬件处理平台对系统算法进行硬件验证,通过硬件PC口得到的数据分析误差维持在2%以内。对PC口的数据进行图形分析可以直观地看到系统在控制过程中没有明显的超调量产生,从图形可以说明设计的控制系统效果比较好。同时,验证了自定义算法提高了控制器的控制能力,增强了系统的抗干扰能力和动态特性。该系统具有一定的工业应用价值。

参考文献
[1] 徐林,关天一,刘少华.基于FPGA的仿真与控制一体化实验系统[J].控制工程,2013,20(4):726?729.
XU Lin, GUAN Tianyi, LIU Shaohua. Design of the integrated simulation and control experimental system based on FPGA [J]. Control engineering, 2013, 20(4): 726?729.
[2] 张春杰,谭振伟,李娜.基于FPGA的快速中频自动增益控制系统[J].控制工程,2013,20(5):966?969.
ZHANG Chunjie, TAN Zhenwei, LI Na. Fast IF automatic gain control system based on FPGA [J]. Control engineering, 2013, 20(5): 966?969.
[3] 桂春胜,陈万米,刘军江,等.基于Nios Ⅱ的直流电机控制系统设计[J].计算机技术与发展,2011,21(8):157?160.
GUI Chunsheng, CHEN Wanmi, LIU Junjiang, et al. Designing of DC motor control system based on Nios Ⅱ [J]. Computer technology and development, 2011, 21(8): 157?160.
[4] 黄庆,黄守道,陈泽远,等.不对称电压下PWM整流器的变结构自抗扰控制[J].电机与控制学报,2014,18(1):50?55.
HUANG Qing, HUANG Shoudao, CHEN Zeyuan, et al. Variable structure ADRC control of pulse width modulation rectifier under asymmetrical input voltages [J]. Electric machines and control, 2014, 18(1): 50?55.
[5] 虎恩典,胡时高,刘勇,等.模糊PID控制在镁粉压制系统中的应用[J].控制工程,2014,21(3):361?364.
HU Endian, HU Shigao, LIU Yong, et al. Application of fuzzy PID control in the magnesium powder pressing [J]. Control engineering, 2014, 21(3): 361?364.
[6] 薛萍,王海超,侯娟娟.基于FPGA的无刷直流电机控制系统的研究[J].控制工程,2012,19(z1):26?30.
XUE Ping, WANG Haichao, HOU Juanjuan. Brushless DC motor control system based on FPGA research [J]. Control engineering, 2012, 19(S1): 26?30.
[7] 张志刚,黄守道,任光法.多电源输出发电机系统中PWM整流控制策略研究[J].电机与控制学报,2005(4):387?391.
ZHANG Zhigang, HUANG Shoudao, REN Guangfa. The research on PWM rectifier control strategy in multi?power [J]. Electric machines and control, 2005(4): 387?391.
[8] 殷帅,吕彩琴,马铁华.抑制无刷直流电机换相转矩脉动的新型电流控制[J].电机与控制学报,2015,19(8):47?52.
YIN Shuai, L? Caiqin, MA Tiehua. A novel control scheme to suppress the commutation torque ripple in BLDCM [J]. Electric machines and control, 2015, 19(8): 47?52.
[9] 李自成,尹周平,熊有伦.无刷直流电机换相转矩脉动分析及抑制[J].华中科技大学学报(自然科学版),2012,40(z2):74?78.
LI Zicheng, YIN Zhouping, XIONG Youlun. Analysis and reduction of torque ripple in brushless DC motors [J]. Journal of Huazhong University of Science & Technology (natural science edition), 2012, 40(S2): 74?78.
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
测控技术(2018年1期)2018-11-25
电子制作(2018年11期)2018-08-04
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年23期)2016-11-04
电脑知识与技术(2016年17期)2016-07-23
科技视界(2016年5期)2016-02-22
物联网技术(2015年12期)2015-12-28
电测与仪表(2015年3期)2015-04-09
