
基于门牌识别的未知楼宇环境快速地图构建
2018-05-02 07:41亓国栋蒋如飞张伟军
机电信息 2018年12期
亓国栋 蒋如飞 张伟军
(上海交通大学机械与动力工程学院,上海200240)
0 引言
当前机器人室内定位导航技术已经进入比较成熟的阶段,然而对于一些特殊的应急状况,现有导航技术还不能满足需求。在反恐排爆领域,由于任务的危险性和特殊性,对机器人的自主导航技术提出了更高的要求。在应急事件中,如楼宇内发生火灾、爆炸,存在疑似爆炸物等,机器人事先并不知道楼宇内的环境信息,也缺乏充足的时间和条件扫描楼宇环境进行地图构建,必须利用已有的可用信息,快速构建楼宇内地图,并根据地图快速定位导航到任务目标位置。
现有针对未知环境的导航技术研究主要集中在避障方面,在大范围的位置环境中如何到达指定位置,目前还没有好的解决方法。
针对上述问题,本文通过利用消防疏散示意图构建楼宇地图。消防疏散示意图是楼宇内必备的消防安全标志,获取途径简单,因此适用于大部分楼宇环境。本文通过楼宇消防图获得适用于机器人导航的栅格地图,并从消防地图中利用图像处理技术,提取门牌号、房门的标志性信息,作为地图语义标志,构建语义地图,结合合栅格地图和语义地图,实现机器人在未知楼宇环境内的导航。
1 楼宇栅格地图构建
传统的机器人导航地图构建方式,需要机器人携带传感器对建筑内部进行扫描,并按照一定的格式存储建筑物内部结构信息,用于构建导航地图。而在应急事件中,事态的紧急性不允许机器人事先对建筑物内部进行扫描并构建地图,因此,必须充分利用已知的建筑物信息为机器人提供导航依据。
1.1 消防地图利用价值
消防地图的信息较为简单,通常只有简单的连通性信息,建筑内部的结构性尺寸信息不能精确体现;再加上家具的安放等因素,使得该地图不能作为导航的依据;另外,该示意图可能不能立即提供电子版,需要通过相机拍摄现有纸质图册获得,进一步降低了其可信性。为了规避这一问题,本文只利用了消防地图中的连通性信息,忽略其尺寸信息。
1.2 消防地图图像处理
通过对现有图像进行处理,保留其道路等连通性信息,忽略其他次要信息。
如图1所示,消防地图本身不仅包含了墙壁等结构信息,还有门牌号等文字和一些示意图形,所以需要更加精细的处理。考虑到机器人在消防图中的可行区域为走廊,因此本文仅仅将消防图中的墙壁标识了出来,忽略了其他信息。经过处理,可以从消防图得到一个二值化图像,其中值为0的为障碍物,值为255的为可行区域。同时,测量出一个大致的比例尺作为参考。

图1 某建筑内部消防疏散图
一般来说,门牌号也在消防图中标识了出来。将所有门牌号储存为一个列表,并根据第一步得到的地图确定好坐标,在机器人小车运行过程中,只要小车识别出一个门牌号,就可以从列表中查找到门牌号对应的坐标,从而确定自身位置。在导航中,每次指定门牌号后同样可以从列表中查找坐标,从而给小车设定好目标,用于规划路径。
2 语义地图构建
通过消防图获得的栅格化地图存在以下问题,不能直接作为机器人导航的依据。
(1)信息简单,仅包含基本的建筑信息,无法反映室内桌椅柜、装饰物品等对环境结构信息的改变;
(2)尺寸信息不准确,经过比例放大后,消防疏散图的绘制误差会被放大。
基于以上原因,机器人无法利用地图信息匹配结构特征实现自定位。因此,必须选择一类固定的特征,作为机器人的定位依据。门牌作为室内建筑中一种普遍存在的标志物,其编码本身反映了当前的位置信息。同时,门牌又具有悬挂位置明显、无遮挡等特性,易于被机器人捕捉和辨识。因此,本文将门牌信息作为机器人定位的参考。
2.1 构建门牌语义地图
本文中主要以门牌作为地图的语义项,作为机器人定位和导航的参考。楼宇中各个门牌的位置在消防疏散图中没有直接的反映,需要结合房间信息和门口朝向判断门牌的大概位置。
本文利用最大稳定极值区域(MSER)的方法提取图中的门牌信息,并将图中房门的示意位置作为门牌的位置。
MSER基于分水岭的概念,对图像进行二值化,二值化阈值取[0,255],这样二值化图像就经历了一个从全黑到全白的过程(就像水位不断上升的俯瞰图)。在这个过程中,有些连通区域面积随阈值上升的变化很小,这种区域就叫MSER,如图2(a)所示。由于MSER提取出来的候选框比较多,直接进行字符识别会极大地降低识别速度,因此还需要一些方法对候选框进行筛选。本文主要利用了两个先验条件来进行筛选:一是文字的长宽比例大概在0.5~5之间,而且不会太小,如图2(b)所示;二是门牌往往是一排数字,所以可以排除单个数字的情况,如图2(c)所示。MSER整体识别效果如图2(d)所示

图2 地图中门牌信息提取识别效果
地图中的门牌信息包含两个属性:一是门牌在二维栅格地图中的位置信息;二是门牌相对于道路的信息,以二维向量表示。
2.2 使用门牌作为定位参考
机器人在运动过程中,通过相机捕捉环境图像,并从中提取门牌信息,通过辨识到的门牌号对自身进行定位。基于以下原因,这种定位方式的绝对定位精度极低。
(1)门牌的悬挂方式各不相同,门牌与建筑结构的相对位置是不确定的;
(2)不采用立体视觉的前提下,机器人无法通过单幅图像获得机器人与门牌的相对位置关系。
因此,使用门牌作为定位依据,机器人获得的定位信息仅仅是当前位置的大致范围,而不是精确的位置信息。当机器人通过相机检测到门牌位置信息后,如图3所示,其全局位置则定义为门牌对应的节点。
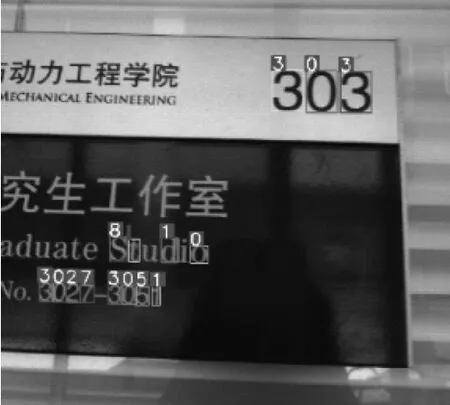
图3 环境中门牌信息提取识别效果
通过门牌位置和朝向,机器人可以确定自身在栅格地图中的大致位置。通过激光雷达监测环境信息并与栅格地图上的建筑物特征进行对比,可以精确地定位自身位置,并在栅格地图上进行标记。
2.3 基于门牌语义地图的导航
为了实现绝对定位,在导航前需要建立好整个环境的地图。如果使用2D雷达来导航,常见的地图有栅格地图等,需要机器人在环境中事先行走一遍绘制好。2D雷达的导航过程如下:首先,需要给机器人一个大概的初始位置。在每一步计算周期中,机器人首先根据里程计等传感器给出这一步的大概位置,之后对位置周围的x、y、θ样本空间进行采样。由于一般机器人在不同位置不同角度使用2D雷达观测到的环境信息不同,将不同样本观测到的信息与地图比对可以确定出一个最可能的位置。由于这一步是根据环境信息确定位置,属于绝对定位,所以不断这样循环后机器人的定位误差可以一直被控制在一个合理的范围内。
然而,消防图的尺寸信息并不准确,使用2D雷达导航时,自定位过程往往会失败。因此,本文引入了门牌的语义信息来辅助完成导航。
在地图中引入门牌语义后,机器人的导航和路径规划将以栅格地图上的门牌位置作为重要参考。首先,根据目标位置机器人将在栅格地图上规划出一条路径;当机器人行走时,由于这里的栅格地图并不准确,机器人自定位经常会失败。当机器人自定位失败时,并不像往常一样停止,而是仍然不断地往前行走;同时,机器人不断拍摄两侧的墙壁,这样就可以在行走过程中识别出门牌号,从而确定出自己的位置。门牌号在过程中起到了两个作用:一是在全局规划时给出一条大概的路径,二是在机器人丢失位置时重新校准位置。
3 门牌语义地图
结合图4(a)所示的地图门牌信息和图4(b)所示的道路结构信息,生成如图4(c)所示的含有门牌语义的栅格地图。在栅格地图的基础上,添加门牌信息作为特征点,作为机器人导航和定位的依据。
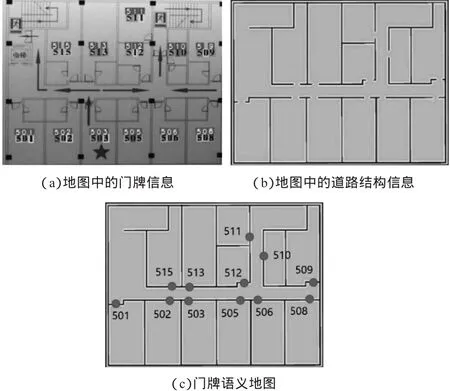
图4 语义地图构建
4 总结展望
在一些无法获得或事先绘制精确地图的应用场景下,消防图往往可以为导航提供足够的帮助。然而,消防图的尺寸信息并不精确,无法直接用于导航。本文基于消防图中的连通信息和门牌号识别完成了导航,其中利用门牌号的语义信息完成了规划和自定位矫正过程。由实验可以看出这种方法取得了不错的效果,值得将来推广使用。
[参考文献]
[1]巩力源.基于改进遗传算法的搜救机器人路径规划[D].南京:南京信息工程大学,2016.
[2]徐坤.搜救机器人人机协作行为控制研究[D].济南:山东大学,2009.
[3]胡吉耀.危险区域搜救机器人及其人机交互系统研究[D].济南:山东大学,2014.
[4]王忠民.灾难搜救机器人研究现状与发展趋势[J].现代电子技术,2007,30(17):152-155.
[5]MATAS J,CHUM O,URBAN M,et al.Robust Wide-Baseline Stereo from Maximally Stable Extremal Regions[J].Image & Vision Computing,2004,22(10):761-767.
[6]EPSHTEIN B,OFEK E,WEXLER Y.Detecting text in natural scenes with stroke width transform[J].Computer Vision and Pattern Recognition,2010,119(5):2963-2970.
猜你喜欢
科技创新与应用(2021年31期)2021-11-09
意林·少年版(2021年18期)2021-09-29
小猕猴学习画刊(2021年4期)2021-05-11
中北大学学报(自然科学版)(2020年4期)2020-07-13
小猕猴学习画刊(2020年3期)2020-04-08
环球时报(2018-10-22)2018-10-22
创新作文(5-6年级)(2016年4期)2016-05-07
弹箭与制导学报(2015年1期)2015-03-11
娃娃画报(2014年4期)2014-08-07
第二课堂(小学版)(2014年6期)2014-07-17
