基于SMA新型旋转微驱动器的设计研究
2018-04-26 12:45:07柴宗兴许立忠曹富林
微特电机 2018年4期
柴宗兴,许立忠,曹富林
(燕山大学,秦皇岛 066004)
0 引 言
随着材料学、精密制造、自动控制理论等先进学科向传统机械不断的渗透,对驱动器的要求也越来越高。传统的电磁电机已不能完全满足社会发展需要。形状记忆合金(以下简称SMA)凭借其良好的综合性能,在新型驱动器的研究上得到了国内外学者的广泛关注。
1951年, Chang和Read发现AuCd系列合金在组织结构为马氏体的条件下发生形变,加热到高温可回复到初始形状[1](即形状记忆效应),SMA驱动器已广泛应用于航空航天、机器人和汽车工业等领域。美国联合技术公司[2-4 ]利用SMA驱动器设计了SMA智能变截面喷口。德国Festo公司[5]利用4个SMA驱动器控制仿生机器蜻蜓飞行姿态,保证飞行的稳定性。韩国设计出一款小型蠕动机器人,利用SMA弹簧驱动各节柱状结构进行蠕动[6-7 ]。上海交通大学胡冰山等[8]设计出一种新型仿生吸盘,该结构采用差动式SMA驱动器进行驱动。北京航空航天大学刘颖等[9]设计了一种通过SMA的记忆特性实现连续旋转的低速电机。2014年南京航空航天大学吴佳俊[10]提出了一种利用NiTi合金的单程形状记忆效应与回复弹簧相互作用的SMA扭转驱动器。
上述研究中,直线型SMA驱动器研究较多,而旋转型的驱动器存在摩擦磨损较为严重的缺点。本文研究的基于SMA新型旋转微驱动器,克服了其他SMA旋转驱动器摩擦磨损严重的缺点。该驱动器利用SMA的直线运动激发激波器做行波运动,再通过活齿推动活齿架转化为输出轴转动。通过对SMA驱动和活齿传动的分析,得到了驱动器转速和转矩随输出轴转角的变化规律,为该样机后续的理论及试验研究奠定了基础。
1 系统结构及工作原理
图1为新型旋转驱动器的二维组装图。该驱动器主要由2对互呈90°的偏置弹簧和SMA丝组成的驱动部分及中心轮、活齿架、激波器和活齿组成的传动部分构成。其中输出轴固联在传动部分的活齿架上,中心轮通过螺钉紧固连接在驱动器外壳上。

图1 新型旋转驱动器
工作时,给SMA丝通电,电流如图2所示。通13.5 mA的大电流加热1 s时,SMA丝的温度迅速达到马氏体逆相变温度。改换12.45 mA的小电流控制加热,随着温度缓慢升高,SMA丝发生马氏体向奥氏体转变并维持1 s时完成。过程中SMA丝应力增大并克服弹簧力,牵引激波器运动直至恢复到变形前的形状;之后断电冷却,当冷却1 s时,SMA丝的温度降到马氏体正相变温度。通过控制冷却参数,SMA丝发生奥氏体向马氏体转变并维持1 s时完成,过程中SMA丝应力减小并在弹簧作用下牵引激波器运动发生变形。在往复振动的2路SMA丝驱动的共同作用下,激波器以中心轮和活齿架二者的几何中心为圆心做行波运动,在活齿的推动下与活齿架固联为一体的输出轴发生转动。
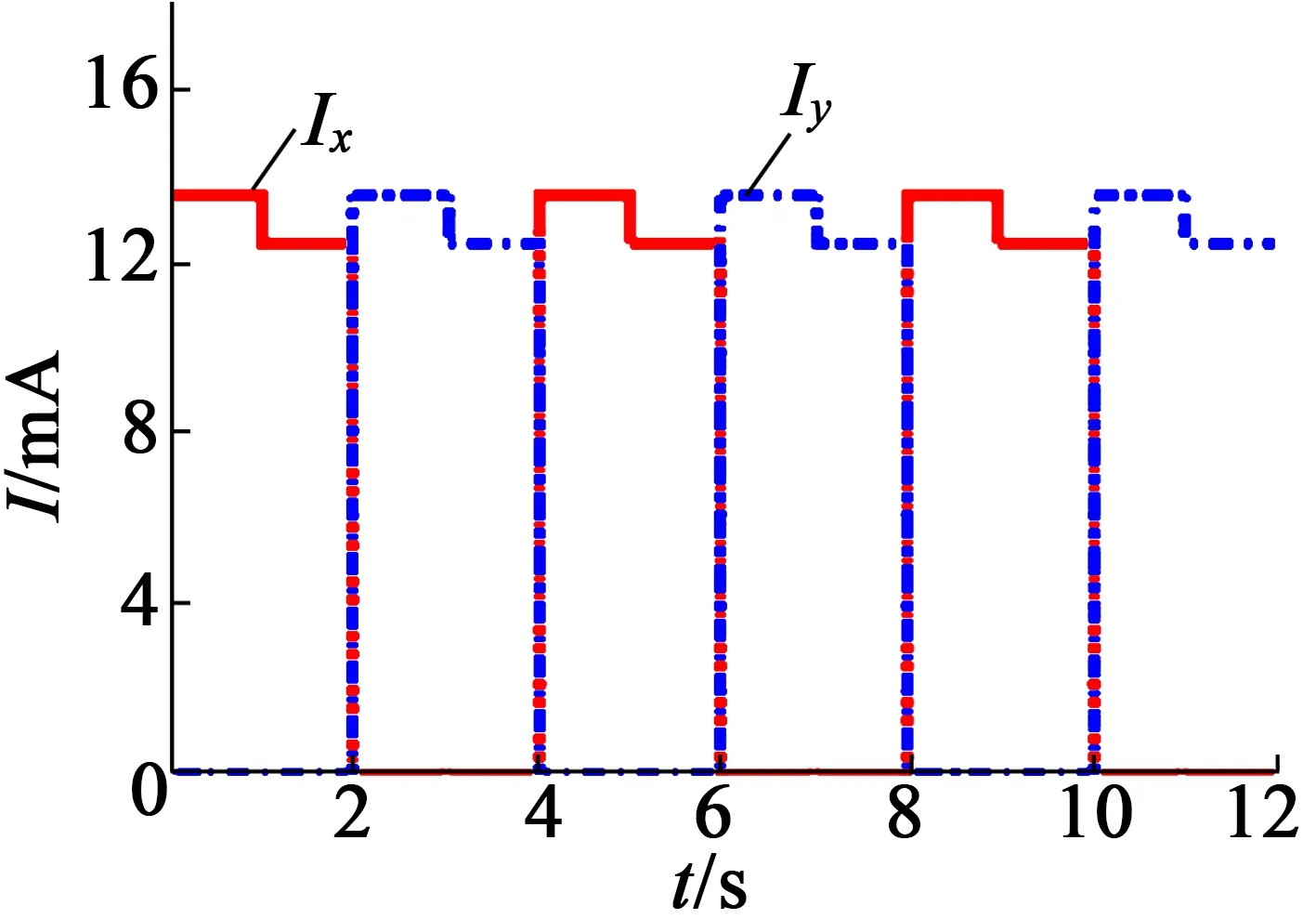
图2 电流I曲线
2 系统性能设计

(1)
式中:σ为SMA的应力;CA为奥氏体相变应力影响系数;T为SMA的温度;AS为SMA开始发生奥氏体相变的临界温度;Af为SMA恰好结束奥氏体相变的临界温度。
当满足正相变条件:


(2)

图3为SMA逆相变过程驱动模型。由SMA一维本构关系可知:

图3 SMA逆相变驱动模型
σ=[ξdEM+(1-ξd)EA]·(ε-ξdεmax)
(3)
SMA丝线性驱动路径应力应变关系:
(4)

X轴和Y轴SMA丝驱动力:
(5)
SMA驱动对激波器的驱动合力:
(6)
由于电阻的存在,SMA丝可简化成带有阻值的电阻,通电时可以看成内热源。在相变过程中,SMA丝的长度:
L=L0(1+ε)
(7)
SMA丝的横截面积:
(8)
式中:V0为SMA丝的体积,且有:
(9)
由电阻公式:
(10)
式中:ρ为SMA的平均电阻率[12],ρ=0.8×10-6Ω·m。
联立式(7)~式(10)可得:
(11)
若只考虑电流加热和对流换热的影响,则SMA丝热效应方程:
(12)
式中:C为SMA的定压比热容,C=7.14J/(kg·K);m为SMA丝的质量;d为SMA丝直径;h为对流换热表面传热系数, 自然条件下其值为5 W/(m2·K);SSMA为SMA丝的换热面积;Tf为流体温度,其值为25 ℃;T1为SMA相变的初始温度。
如图4所示,R,r和a分别为传动部分的激波器半径、活齿半径和激波器偏心距。以第i个活齿、激波器和中心轮轨迹三者的几何中心O1,A1和O共线位置为Y轴,不考虑活齿传动过程中摩擦和装配误差的影响,则第i个活齿的受力如图4所示[13]。在转动过程中,第i个活齿可转动到其他任一活齿的位置。为简化活齿传动过程中的受力分析,则其他所有参与啮合的活齿均可以用第i个活齿在不同位置啮合来代替[14]。
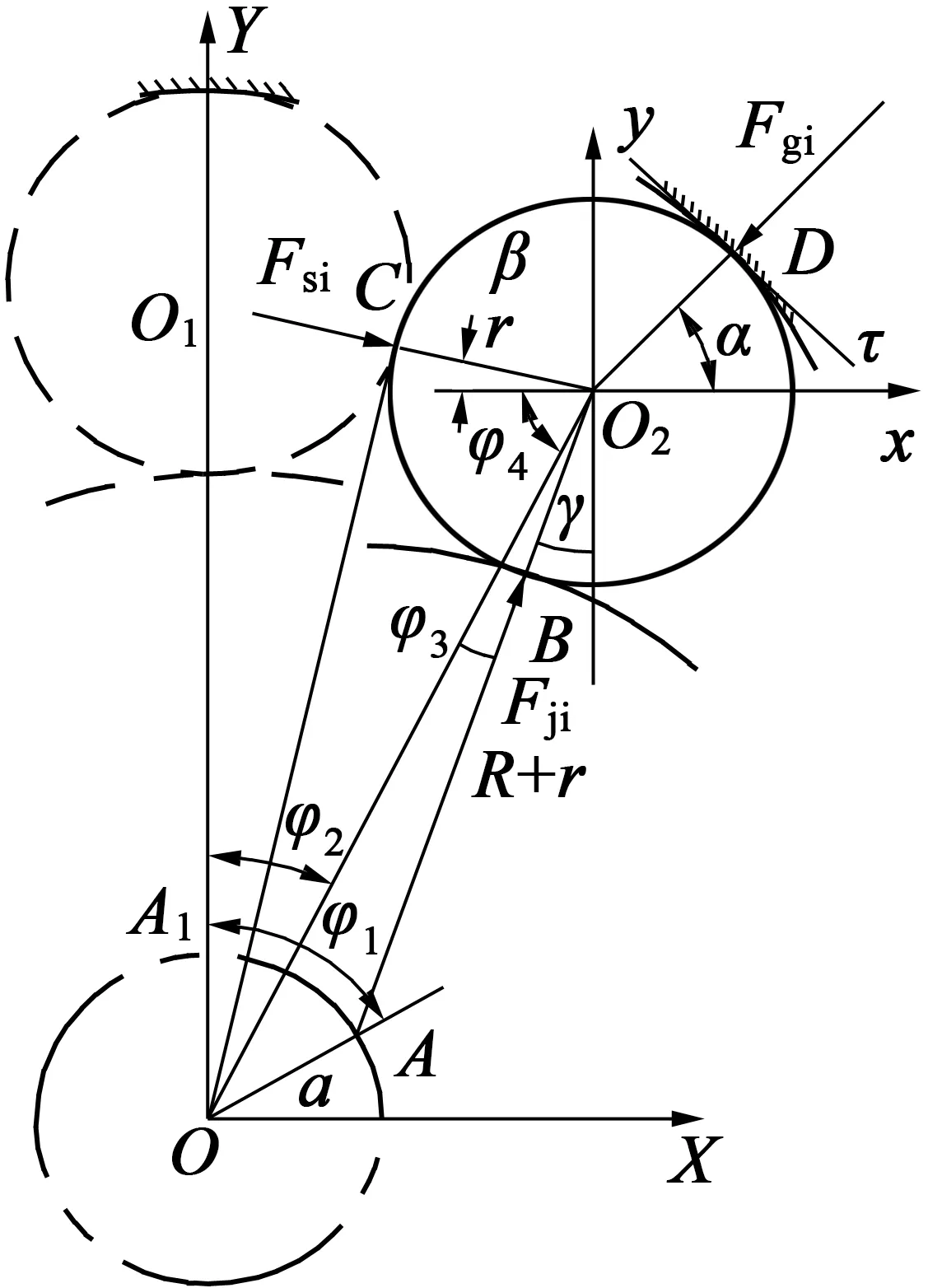
图4 活齿受力图
由文献[15]可知OO2的长度:
(13)
中心轮上D点轨迹方程:
(14)
式中:α为D点轨迹的法线方程与x轴的夹角,且满足0≤α≤π。
图4中τ为D点轨迹的切线,则有:
(15)
在△AOO2中,由正弦定理得:
(16)
在直角△COO2中,有:
(17)
由图4可知:
(18)
对第i个活齿列受力平衡方程:
(19)
式中:Fji为激波器作用在第i个活齿上的力;Fsi为活齿架作用在第i个活齿上的力;Fgi为中心轮作用在第i号活齿上的力。
不考虑加工与装配等误差造成的间隙对活齿传动的影响,且激波器与活齿间产生弹性变形,当激波器做行波运动产生Δθ时,激波器在与第i个活齿啮合处发生的弹性变形[16]:
sin[(i12-1)φ2]
(20)
式中:ε为第i个活齿给激波器造成的最大弹性变形。
假设激波器受到第i个活齿的作用力与激波器产生的弹性变形量成正比,则有:
sin[(i12-1)φ2]
(21)
式中:Fjmax为激波器对活齿的最大作用力。
激波器对活齿的最大作用力:
(22)
SMA活齿传动系统的输出转矩:
(23)
3 算例求解与分析
表1为驱动器的设计参数。把相关参数分别代入上述方程,可得驱动过程中驱动器转角、驱动力和驱动转矩的变化规律。图5为激波器转角随时间变化规律;图6为驱动力随激波器转角变化规律;图7为驱动转矩随输出轴转角变化规律。
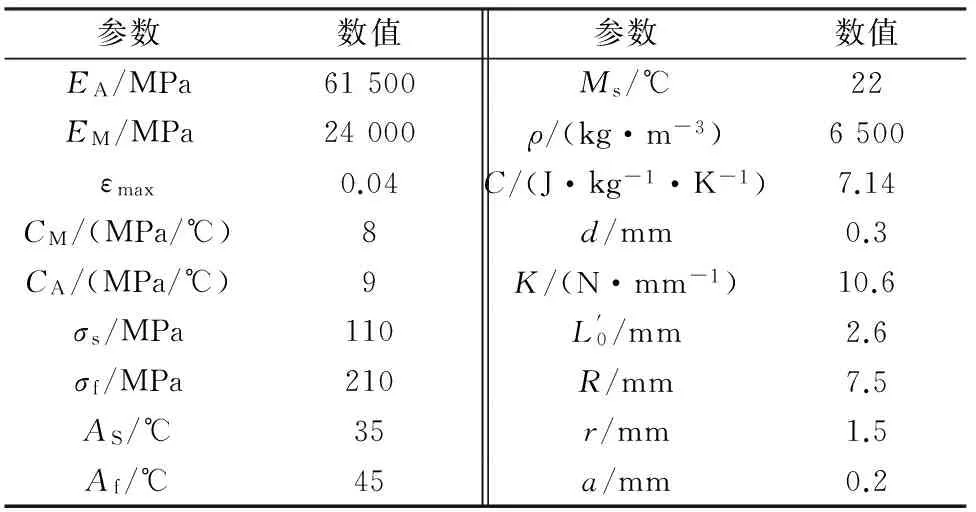
表1 驱动器参数表

图5 激波器转角曲线

图6 驱动力与激波器转角关系
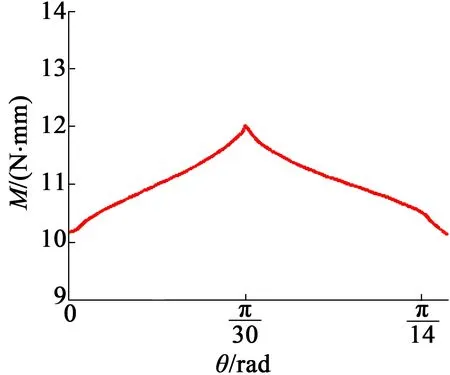
图7 驱动器转矩曲线
由图5~图7可得:
(1) 开始工作时,驱动器有大约1 s的预热时间,之后激波器转速呈现周期性变化,周期为4 s;


4 结 语
集SMA驱动和活齿传动的优点,本文研究了一种基于SMA新型旋转微驱动器,该驱动器能实现连续低转速运动。给出了驱动器的基本结构及工作原理、主要设计过程和理论推导,得到了驱动器的输出转速和输出转矩的变化规律。结果表明,驱动器的输出转速和SMA驱动力均呈现出周期性变化,输出转矩波动范围大。该驱动器可用于要求低转速但对转矩要求不高的精密场合。为该样机性能和结构尺寸的进一步优化奠定了基础,为样机的制作和试验提供了理论依据。
[1] CHANG L C,READ T A.Plastic deformation and diffusionless phase changes in metals-the gold-cadmium beta phase[J].Journal of Metals,1951,3(1):47-52.
[2] BAROOAH P,REY N.Closed-loop control of a shape memory alloy actuation system for variable area fan nozzle[J].Proceedings of SPIE-The International Society for Optical Engineering,2002,4693:384-395.
[3] REY N M,MILLER R M,TILLMAN T G,et al.Variable area nozzle for gas turbine engines driven by shape memory alloy actuators:US,US6318070[P].2001.
[4] REY N,TILLMAN G,MILLER R M,et al.Shape memory alloy actuation for a variable area fan nozzle[J].Proceedings of SPIE-The International Society for Optical Engineering,2001,4332:371-382.
[5] GAISSERT N,MUGRAUER R,MUGRAUER G,et al.Towards Autonomous Robotic Systems[M].Berlin:Springer,2014:90-100.
[6] YUK H,KIM D,LEE H,et al.Shape memory alloy-based small crawling robots inspired by C.elegans.[J].Bioinspiration & Biomimetics,2011,6(4):1001-1004.
[7] KIM B,LEE M G,LEE Y P,et al.An earthworm-like micro robot using shape memory alloy actuator[J].Sensors & Actuators A Physical,2006,125(2):429-437.
[8] 胡冰山,吴明晖,付庄,等.差动式形状记忆合金驱动器驱动的仿生吸盘[J].华中科技大学学报:自然科学版,2010(7):16-19.
[9] 刘颖, 闫晓军.一种低速连续旋转SMA电机的设计与试验[J].航空动力学报,2010,25(9):2023-2029.
[10] 吴佳俊,王帮峰,芦吉云,等.一种形状记忆合金扭转驱动器的制备与测试[J].中国机械工程,2014(12):1591-1594.
[11] BRINSON L C.One-dimensional constitutive behavior of shape memory alloys: thermomechanical derivation with non-constant material functions and redefined martensite internal variable[J].Journal of Intelligent Material Systems & Structures,1993,4(2):729-742.
[12] 杨杰,吴月华.形状记忆合金及其应用[M].合肥:中国科学技术大学出版社,1993:109.
[13] 柴宗兴,许立忠.机电集成形状记忆合金活齿传动装置受力分析[J].中国机械工程,2017,28(19).
[14] 李怀勇.新型杆式压电电机研究[D].秦皇岛:燕山大学,2013.
[15] 李剑锋,曲继方.波齿传动啮合状态几何模型的建立及其应用[J].兰州理工大学学报,1989 (3):26-33.
[16] 丁肇棣,曲继方.波齿传动的受力分析和效率计算[J].燕山大学学报,1988(2):31-35.
猜你喜欢
航空学报(2020年8期)2020-09-10 03:25:34
航空发动机(2020年3期)2020-07-24 09:03:16
电脑爱好者(2020年6期)2020-05-26 09:27:33
科学技术创新(2020年21期)2020-01-06 20:58:51
中学生数理化·八年级物理人教版(2019年12期)2019-05-21 07:26:42
实验流体力学(2018年3期)2018-10-10 03:10:12
北京航空航天大学学报(2017年8期)2017-12-20 08:04:50
光学精密工程(2016年5期)2016-11-07 09:06:04
上海电机学院学报(2015年3期)2015-02-28 14:29:52
中国工程咨询(2015年8期)2015-02-16 06:38:52