
卫星导航差分系统和增强系统(二)
2018-04-25 07:59刘天雄
卫星与网络 2018年3期
+ 刘天雄
2 差分系统及其实现方案
2.1误差分析
卫星导航系统误差源分为三类,一是所有用户共同面临的误差,包括卫星钟差、星历误差、卫星信号发射天线相位中心偏差;二是不能由用户测量或由校正模型来计算的传播误差,包括大气电离层和对流层延迟误差;三是接收机固有的误差,包括电子线路中的内部热噪声、通道延迟、接收机天线相位中心偏差以及不确定性的多路径误差,如图1所示。误差对定位精度的影响的如图2所示。
在研究误差对卫星导航系统定位的影响时,利用差分技术可以完全消除第一类误差;可以消除大部分第二类误差,但取决于基准接收机和用户接收机之间的距离;第三类误差依靠差分技术无法消除,如空间相关性较弱的多路径误差,是变化很快的随机噪声,以及选择可用性和用户接收机噪声带来的误差。为了消除前两类误差,在基准参考站配置高稳定度的原子钟以提供稳定频率标准,中心站获得原始测量值,对测量误差进行分析处理时,若采用误差分项分析及剥离方法,则必须建立分项误差模型。如果提高星历误差的估计精度,就要建立卫星动力学模型,这种动力学方法用载波相位作为测量值,因此必须解决整周模糊度问题。
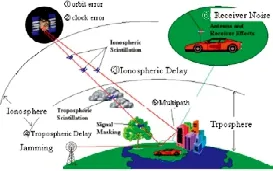
图1 卫星导航中的误差
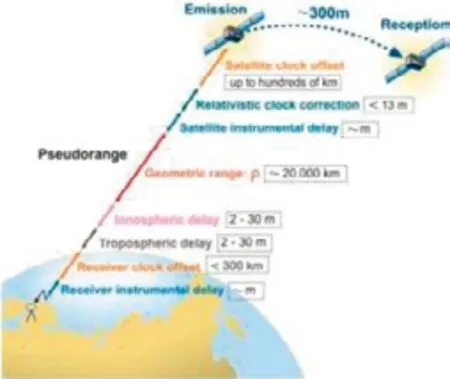
图2 误差对定位精度的影响
提高系统定位精度的方法主要是对伪距或载波相位等观测误差进行改正,采用伪距及其误差改正数可以获得亚米级定位精度,采用载波相位观测及其误差改正数可以获得厘米级定位精度。改正数生成方式包括观测值域改正数和状态域改正数两类,观测值域改正数不对误差源细化细分,主要对伪距或者载波相位的观测量进行综合误差改正,该改正数与地面站地理位置空间强相关,适用于局域差分改正,是用户级差分,一般地基差分系统采用观测值域差分改正;状态域改正数对伪距和载波相位误差源细化为星历、钟差、电离层延迟等误差,并分别对相应误差进行修正,改正数与地面站地理位置空间弱相关,适用于广域差分,是系统级差分服务,一般星基差分系统采用状态域差分改正。
根据参考基准站播发的改正信息,将差分系统分为位置差分、伪距差分和载波相位差分三类,这三类差分方式的工作原理是相同的,都是由基准站发送改正信息,用户接收并对于其测量结果进行改正,以提高定位精度,不同的是播发的改正数内容不一样,其差分定位效果也有所不同。
位置差分:从概念上讲,实现卫星导航差分系统最简单的办法是把参考接收机放置在位置已知的基准站上,基准站的接收机接收可解算出基准站的位置坐标。由于存在着星历误差、卫星钟漂移、电离层及对流层延迟、多径效应以及SA误差等其他测量误差,解算出结果与基准站的已知坐标是不一样的,接收机测量值和真值之间存在误差,基准站利用数据链将误差修正信息播发给周边用户,用户接收到差分改正数后,可以消除基准站和用户之间的共有误差,特别是星历误差、卫星钟误差以及SA误差。
这种差分方法存在不足,要求所有接收机对同样一组卫星进行伪距测量,要求具有同样的精度几何因子GDOP,才能达到所受的偏差影响是相同的要求,因此,用户接收机必须与按基准站选择导航卫星,或者基准站必须测定并发送对所有可见卫星组合而言的位置校正值,显然这种方法对用户来说不方便,对基准站来说也不经济。实际上,不同位置上的用户接收机和远端基准站的接收机很难保证定位解算过程中的几何精度因子GDOP值是相同的。位置差分法适用于用户与基准站间间隔在100km以内的局部区域。
伪距差分:伪距差分是目前应用最广的一种差分技术。首先测量位置已知基准站与可见卫星之间的距离,与含有星历误差、卫星钟漂移、SA误差、电离5层及对流层延迟等测量误差的测量伪距加以比较;然后基准站将所有卫星的伪距测量偏差广播给用户,用户利用此测距误差来修正测量的伪距;最后用户利用改正后的伪距来解出本身的位置,由此消去公共误差,提高定位精度。
与位置差分类似,伪距差分能消除用户和基准站之间的公共误差,但随着用户到基准站之间距离的增长又出现了系统误差,这类误差用任何差分法都是不能消除的。用户和基准站之间的距离对于精度提高的程度有决定性影响。
载波相位差分:由于导航卫星在轨高速运动,一般要求接收机能够解算出载波单频点上变化的多普勒频移。在使用双频接收机的场合,要同时跟踪两个频率。对多普勒频移积分能极精确地测量出各个时间历元之间信号载波相位。干涉测量技术利用这些精确的相位测量值,可获得厘米级的实时位置精度。虽然在历元之间信号相位的变化能极精确地测量出来,但从卫星到接收机传播路径上的载波整周期数仍是模糊的。确定传播路径上的载波整周期数叫做“载波整周模糊度解算”,它是动态卫星导航差分技术研究范畴中一个活跃的研究领域。
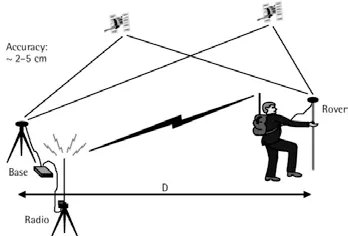
图3 RTK定位技术
利用载波相位相对定位就是RTK(real time kinematic)测量技术,RTK利用两部或多部接收机同时跟踪同样的多颗导航卫星,基准站位于位置已知的固定点上,基准站利用无线电链路将位置和测量信息播发给移动的用户,用户接收机内置的软件合成并处理来自基准站信号和来自导航卫星的信号,最终实现位置解算,如图3所示。目前,初始的载波整周模糊度几乎可用on-the-fly(OTF)技术实时解模糊。这种方法适用于如下三种情况,①用户与基准站的距离为10~15km;②用户需要实时解算出三维位置坐标;③信号传播路径无障碍。
为了克服RTK测量技术有效范围有限(10~15km)的缺点,近年来在常规RTK基础上发展了网络RTK技术,也称基准站RTK,通常在一个区域内建立多个(一般为三个或三个以上)卫星导航监测基准站,对该区域构成网状覆盖,并以这些基准站中的一个或多个为基准计算和发播卫星导航系统差分改正信息,从而对该地区内的用户进行实时改正。网络RTK的基本原理是在一个较大的区域内稀疏地、较均匀地布设多个基准站,构成一个基准站网,借鉴广域差分系统和具有多个基准站的局域差分系统中的基本原理和方法来设法消除或削弱各种系统误差的影响,获得高精度的定位结果。
2.2工作原理
差分技术意味着我们可以从至少两个相隔某一固定距离(又称为基线)的接收机中获得相似的测量值集合,将两个接收机得到的相似的测量值线性差分,就可以消除两个接收机共有误差。差分卫星导航系统组成如图4所示,包括能够接收差分修正信号的用户接收机,一座位置已知的卫星导航系统基准站(通常又称为差分台),基准站接收导航信号并确定位置坐标,由于基准站的位置是确定的,通过比较测量结果和实际位置(真值)之间的偏差,就可以计算出导航信号中包含的误差,由此,可以计算出卫星导航系统的改正数,然后再由基准站利用通信链路将差分修正信息播发给附近的用户。
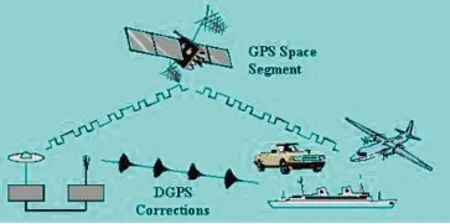
图4 卫星导航差分系统组成
差分系统的道理很简单,如果我们汽车往右偏了,那么谁都知道稍稍的向左打轮调整。卫星导航差分技术也是同样的道理,电离层、对流层、钟差、星历的影响不是会产生误差吗?首先确定一些位置已知点的信息,如果已知点和被测点距离足够近,那么可以认为它们受到的那些影响基本是相似的。这样,计算过程中将它作为参照,来确定应该将接收机解算的结果“左调”还是“右调”一些,从而得出更准确的定位结果。卫星导航系统用户接收机的伪距和载波相位观测量受到各种误差的影响,误差源给相距不远的用户所造成的误差都是类似的,且随时间缓慢变化。也就是说,误差在空间和时间上都是相关的,由于参考站接收机所在的位置是确定的,那么就可以估算出接收机的测量误差量,这样的估算误差的方法习惯上称为差分修正,如果参考站接收机附近的用户能够接收到差分改正信息,那么就可以用差分改正信息来减少定位解算误差,称为卫星导航差分系统(Differential GNSS System,DGNSS),所有的DGNSS系统都使用这些误差的相关性来改善系统的定位精度。
误差改正分标量改正和矢量改正两种。矢量改正数包括星钟误差、星历误差和电离层时延等,改正效果好;另一种方法是在服务区内分别采集各自站点对卫星的观测数据、气象数据、电离层延迟数据,上报主控站处理后,形成栅格结点上的服务能力,如把复杂的电离层误差曲面化分割,用户可以利用内插方式选择电离层延迟修正值。
基准站通过数据通信链路为用户提供改正信息,包括:①终端用户原始伪距测量值的校正值,卫星时钟和星历的校正值;②基准站原始测量值(伪距和载波相位);③完好性数据(可见卫星的“可用”或“不可用”指示,或提供校正值精度的统计值);④辅助数据,包括基准站的位置、健康状况和气象数据。卫星导航差分系统可以按照服务的地理区域来分类,小规模的差分系统服务区域为10~100km,为了覆盖更大的地理区域,通常还需要采用多基站以及不同的算法。区域系统覆盖范围最大可达1000km,而广域系统的覆盖范围更大。差分系统对各类误差的修正如表1所示,
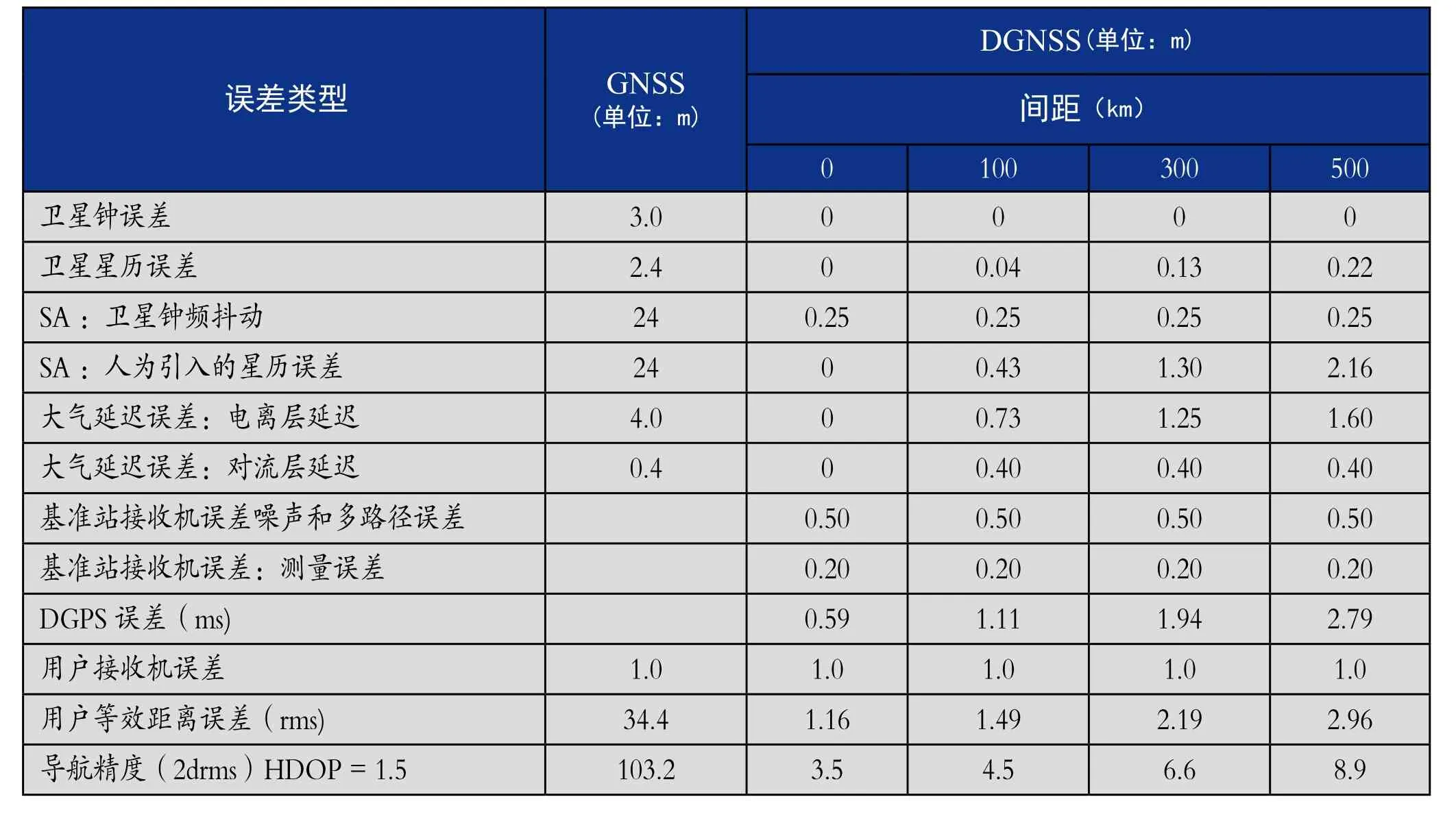
表1
对于一个基准站而言,其有效作用范围(覆盖范围)主要由差分系统定位精度要求和数据通信链路的性能决定。差分定位可以提高精度的原因在于它可以消除基准站与用户之间的公共误差,但随着用户距基准站的距离的增加、对流层和电离层误差公共性逐渐减弱而降低。基准站和用户之间的距离对用户定位精度有着决定性的影响。
猜你喜欢
地理空间信息(2022年10期)2022-10-31
现代测绘(2022年3期)2022-07-23
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
电子制作(2019年24期)2019-02-23
电子制作(2018年19期)2018-11-14
制造技术与机床(2018年10期)2018-10-13
雷达学报(2017年1期)2017-05-17
测绘通报(2016年12期)2017-01-06
电子制作(2016年1期)2016-11-07
