医用静脉曲张压缩袜的压力检测方法探讨
2018-04-24 11:49:44胡修元振德医疗用品股份有限公司浙江绍兴312035
中国医疗器械信息 2018年5期
胡修元 振德医疗用品股份有限公司 (浙江 绍兴 312035)
医用静脉曲张压缩袜(简称,医用压缩袜)是一种以自下而上、逐渐递减的方式对腿部施加一定的压缩力,以治疗腿部静脉和或淋巴疾病的压缩袜。医用压缩袜在脚踝部建立最高支撑压力,顺着腿部向上逐渐递减,在小腿腓肠肌部位减到最大压力值的50%~80%,在大腿处减到最大压力值的20%~50%。压力的这种递减变化可促使下肢静脉血回流,有效缓解或改善下肢静脉和静脉瓣膜所承受压力。随着来自于欧美、台湾以及国内医用压缩袜制造商的不断推广和教育,医用压缩袜越来越多地应用于下肢静脉疾病的预防和治疗,甚至被年轻人们用作压力瘦身和美腿。但是不适当的压力,同样会增加下肢静血液循环不良的风险。因此,医用压缩袜提供的压力值至关重要。为了获得医用压缩袜不同部位的压力值,国内外采用了多种测量装置,国内YY/T 0853-2011标准中采用与EN 12718①标准中相同的测量装置,EN 12718标准中推荐了德国海因斯坦研究院(SchlossHohenstein)的HOSY测量装置和BS6612标准中的HATRA测量装置,本文将对这三种测装置及试验方法进行介绍,并比较这三种测量装置的优缺点。
1力测.Y量Y方/T法0 853和EN 12718标准中采用的压
YY/T 0853和EN 12718标准中采用的压力测量方法其原理是当压缩袜根据其规格沿横向拉伸时(在保证纵向无变形的前提下),测出压缩袜在某一宽度范围内的受力。用拉普拉斯公式将测量的力转化为压缩力。
1.1 测量位标识
测量位标识装置(见图1),其上装有一个可调的夹具,能固定压缩袜的下端。测量时,将压缩袜的腿放在标示和测量装置上,用脚内侧脚架将压缩袜固定到固定夹具上,将足跟的最低点设在刻度的零点以下25mm处。在各测量点,用该装置上的刻度尺或基准线和毡笔在压缩袜腿中心线上标出以下各测量点(见图2,该图说明了中心线上各测量位的标示点)。沿各标示点处的织纹,标出3个上针穿出点和2个下针穿出点,并标出两条限位钉的穿刺线。
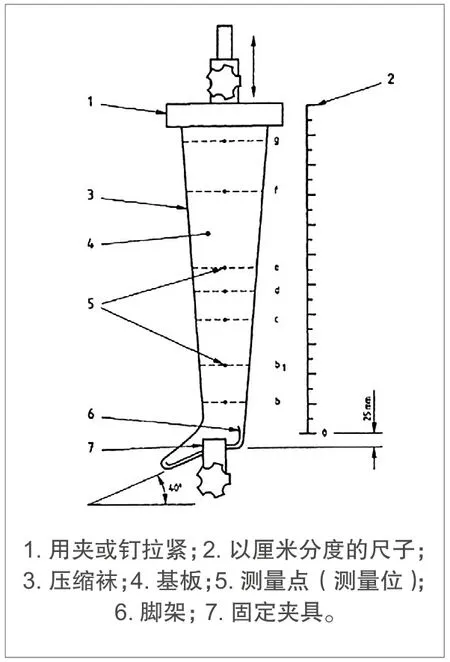
图1. 测量点的标示装置

图2. 测量点的标示
1.2 测量装置
测量装置见图3,由拉伸试验机的横梁、力传感器、上针棒、下针棒、抗缩颈杆和限位钉、定中心轴和拉伸试验机的基台组成。抗缩颈杆和限位钉如图4。(注:根据图3,压缩袜在其宽度方向靠使用嵌入针的棒使其伸展。这些棒插入压缩袜的内部,针通过织物在标记位穿出。用与一个拉伸试验机连为一体的夹具将针夹住,以便在给定的测量位拉伸压缩袜。)
图3中三个上针棒用于固定试样的一侧。夹持时,外侧的两个棒固定于拉伸试验机的横梁上,中间的棒则固定于拉伸试验机的力传感器上,并使三个棒呈一条直线。
中棒与外棒要适当分开,才能保证对织物的中间部分独立的精确测量。外棒的受力直接传到横梁上。这样,由于织物的变形发生在外棒的外端的端部,因此不会影响测量精度。
为确保在试验中三个棒排成一排,可将它们在放到试样里面之前,先套在一个闭合的套袖内,将这些杆夹到机器上后及时取下套袖。压缩袜的另一侧用带两个针的杆固定住,夹持两个针的夹具连在试验机的基台上,并可以旋转。所有棒的直径为6mm。上面的棒各长30mm。在测量过程中它们不相互接触。下棒的长度等于三个上棒的总长(90mm)。
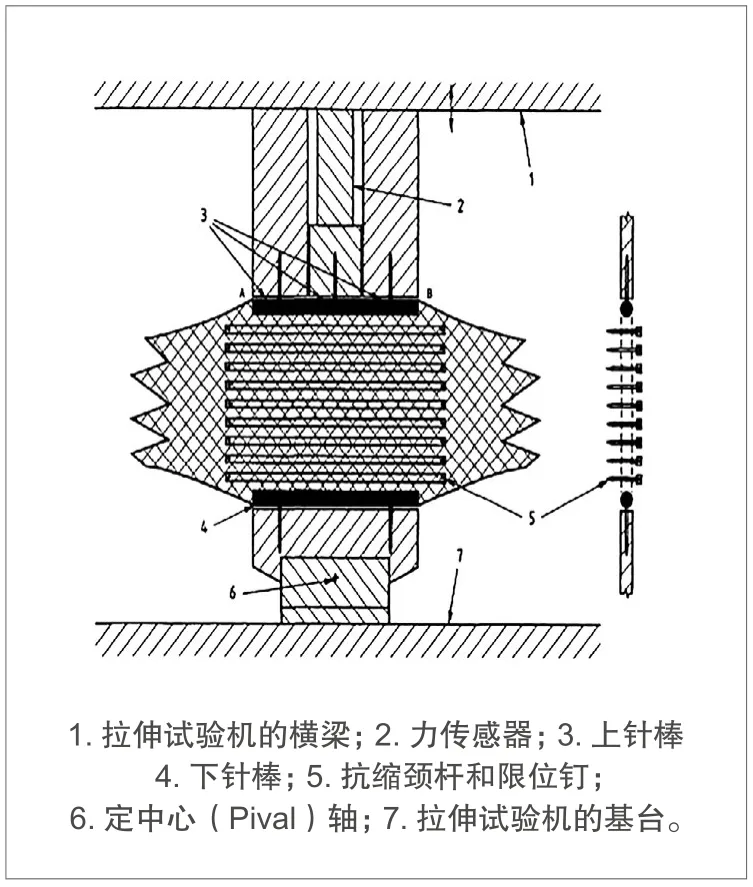
图3.测量装置示意图
用限位钉在垂直列上穿刺测量位的两侧织物,以保持压缩袜长度方向拉伸后的测量区,避免缩颈。限位钉可以插到撑杆的两端,如图1.3所示。限位钉的垂直间隔宜是在最大伸展处,相邻的钉的间距不超过20mm。
1.3 零位设置
压缩力测量前,安装上棒(不装试验样品)对力清零。然后,安装下棒,对上棒和下棒的距离调零。零位是指当上下棒刚好接触时的位置(如图5所示)。
1.4 最小和最大棒间距
计算最小和最大棒间距,计算公式如下:
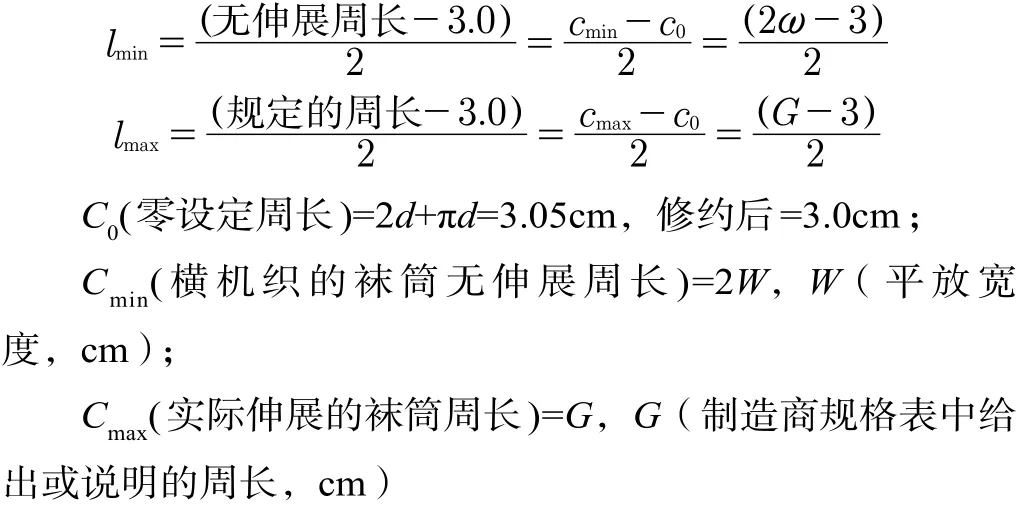
1.5 最小距离(循环下限)
调整上下棒至计算的最小距离lmin(如图6所示)。从夹具中取下各棒并放入压缩袜的内部,将试样在拉伸试验机上定位。然后,将隔离杆的限位钉沿压缩袜的横向标线穿过织物,各钉的间距约为10mm。
1.6 最大距离(循环上限)
以200mm/min的拉伸速度从最小距离lmin拉伸到试验样品至最大距离lmax(见图7所示)5次,并返回。继续第6次拉伸至lmax,达到时立即记录力值,以cN为单位。

图4抗缩颈杆和限位钉

图5. 零位设置

图6. 最小距离(循环下限)
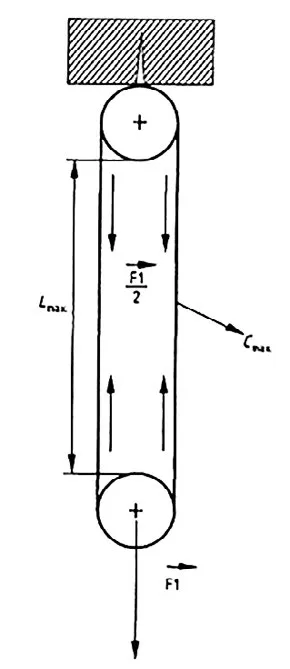
图7. 最大距离(循环上限)
1.7 压缩力
用拉普拉斯公式计算压缩力:
式中:
P1——压缩力=每袜筒长度织物中的力/腿周长,hPa;
F1——第六次循环在Lmax处的拉力(2×织物中受力),cN;
Cmax——实际伸展的袜筒周长(在Lmax处的周长),cm;
l——中棒的长度。
2.ATRA压力测量装置
BS6612标准中介绍了HATRA测量装置(见图8),其主要原理是将压缩袜套在模拟人腿设计的模型上进行测试。首先确认袜子按照腿的长度套好、均匀拉伸,以使弹力织物被拉伸的力转化为对模型的压力。通过改变模型的尺寸测量袜子的松紧度,例如:改变模型的周长以获取不同的压力。
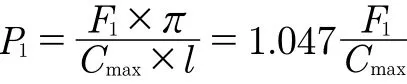
2.1 测量仪器
测量仪器如图9,仪器由两大部分组成,腿状模型和测量探头。腿状模型由两根金属棒组成简单的腿状结构,其中一根棒是可以活动的,获得不同尺寸的腿型以适应不同尺寸的压缩袜测试。在模型棒的两头都有支出点,可方便的移动到所需要的卡槽中,以适应测量7种尺寸的压缩袜,相应尺寸可按压缩袜制造商给出的不同压缩袜周长。固定在下面的棒上的两个曲面,分别组成腿模型中的小腿和大腿。在上下棒上装有用来固定袜子的悬挂式夹子,根据袜子的尺寸沿棒移动夹子将袜子固定在正确的位置上。

图8. HATRA测量装置
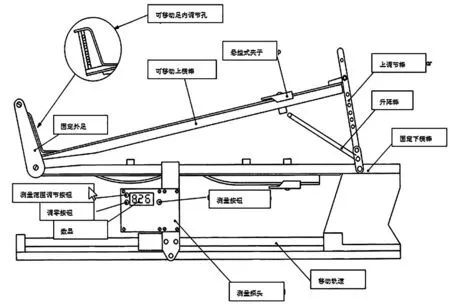
图9. 测量仪器示意图
通过探头来测量安装在模型上被拉伸的袜子产生的压力,探头可以沿滑轨移动来测量长度方向任意一点的压力,滑轨上有3个标记点,以保证所有的袜子都在相同的标准测量位置上测量压力,与袜子的尺寸无关(注:标记的测量位置距脚底的距离分别是10cm、31cm、60cm,这些距离是以脚后跟为起始点,测量上下两棒中心线所得数值)。
在测量探头(见图10)的顶部由保护罩保护着舌状探针,探针非常灵敏,只测量圆周方向的压力。当舌状探针压入压缩袜时,压缩袜产生的压力将舌状探针推回去,马达会自动将探针顶出,直至平衡,这时会在显示器显示弹力数值。探头由4节可使用几万次的干电池驱动。为了保证探头始终保持灵敏性、准确性,当电池的电压不足时,显示器会显示电压不足,提醒更换电池。
2.2 选择袜子的尺寸
如果制造商只标识踝关节的周长,按照表1给出的模型标准设置周长进行测量,这些周长与其实际周长大致相等。如果制造商明确标识了其他周长,将测量周长与其实际周长相当。

图10. 测量探头

表1. 模型标准设置周长
2.3 把需要测试的袜子套在腿状模型上
①先把袜跟固定在左手边脚部固定装置上,然后把袜口的上端和下端用设备附带的悬夹固定在上、下横棒的曲面位置上;②扳动升降棒,把整袜身撑开,使整个袜身伸展开来;③在袜跟处调节腿模弯曲部位正对袜跟的位置,同时用手左右拨动袜身以调整袜子的松紧平衡,以使用袜子均匀平整套于腿状模型上;④扳动升降棒,使整个袜子伸展开来,连续伸展3次。
2.4 压力测量
静置60s后开始测量,先把测量探头沿着滑轨移动需要测量压力的第一个测量标识点处,然后将测量探头按压在对应测量点的袜身上,读取显示器上的数值并记录。依次沿着滑轨将测量探头移动到下一个测量标识处,完成测量,读取显示器上的数值并记录。
2.5 压力计算
压力计算公式如下:
P=4·t/g
注:P——压缩力,mmHg;t——读数;g——周长cm
这是一个以拉普拉斯方程为基础的测定管状物壁上压力的方程。圆周上压力以半径作圆弧向外扩散,方向向外(压力=弹力/半径)。计算时的半径为测量部位的半径。
3.德国海因斯坦研究院(Schloss Hohenstein)的HOSY(HOhenstein System)测量仪器
HOSY(HOhenstein System)测量仪器的测量原理是当压缩袜根据其规格沿横向拉伸时(在保证纵向无变形的前提下),测出压缩袜在某一宽度范围内的受力。
3.1 HOSY测量仪器
图11. HOSY测量仪器
HOSY测量仪器由20个独立的可直接进行测量的拉伸试验装置组成,每个试验装置的宽度5cm(见图11)。采用双罗拉形成夹持,固定压缩袜。每个试验单元有独立的步进电机驱动,同时可监测两个夹头之间距离。压缩力的值由传感器测量。整个测量过程由电脑控制。测量操作时,按照所需要的长度将袜子固定在HOSY测量仪上。然后拉伸至设定的周长,这样检测到袜子圆周方向上施加的拉力,以此方法检测到的拉力通过计算得到压力值。
每一个单独的测量点或夹具测量的结果,例如伸长率,拉力,压力,剩余压力以表格形式显示。此外,压力分布以图表形式显示,见表2、见图12。
3.2 测试方法
将袜子放置在一排灵活的螺旋弹簧式固定夹子中,并将压缩袜的足部和袜边固定在可调节的夹持装置上。随后调节夹持装置的位置,使压缩袜的测量点B位于夹持2的中心,而压缩袜的另一端则对应规定的腿长。然后,将螺旋弹簧部分依次插在压缩袜上,对所有测量夹头的力传感器调零。
为了便于将压缩袜插入到夹子上,先将各拉伸夹上移到压缩袜下边的相同高度,随后移动各拉伸夹,给试样施加预拉力。当压缩力等级为Ⅰ级和Ⅱ级时,每厘米的压缩袜对应的预拉力不超过5cN,当压缩力等级为Ⅲ级和Ⅳ级时,每厘米的压缩袜袜对应的预拉力不超过10cN。
电脑程序按给定的周长自动计算每个夹持到达指定位置需要的动程,在20s后所有的夹持到达指定位置。
以相同速度,往返拉伸试样6次,并最终回到原位。
计算机以表格形式显示在给定周长条件下,沿腿长方向的每个测试夹或测试点上的伸展率、拉伸力、压缩力、和剩余压力比。
注:测试点B的压缩力决定压缩袜的压缩力等级。所以压缩袜在测量点B的伸展率等数值不能通过计算得出,因此,将测量点B固定在第2个夹板的中心位置。
压缩力用以下公式表示:
Pi=20π ·Fi/Ui
注:Pi——测量点i的压强(kPa);Fi——测量点i的受力(N/cm);Ui——测量点i的腿围(cm);i——测量点B到G以及夹板1~20。
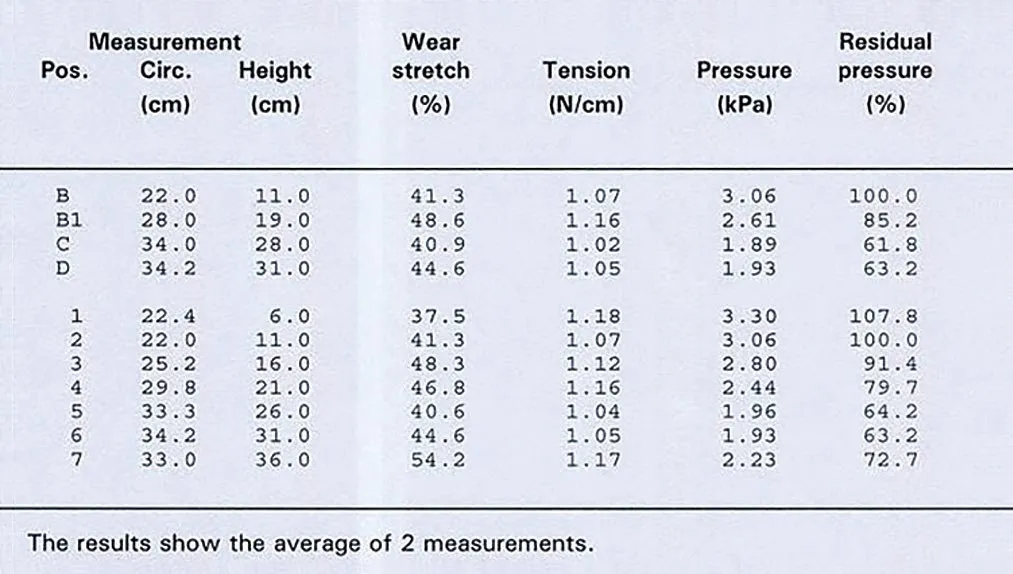
表2. 压力分布表格示例

图12. 压力分布图形示例
4.检测结果比较
笔者工作单位有用于第一种检测方法和第二种检测方法的仪器和装置,因此首先对这两种方法的结果进行了比较。随机从一批标识为:AG 22-24(49-54/65-75)CclII的压力二级长筒压缩袜中抽取10只样品,编号1~10。其中一组编号为1、4、5、7、10,另一组编号2、3、6、8、9。结果如下表3。
从表上结果来看,两组数据B、B1、C和F各点的检测结果的平均值差异分别为-0.90,-2.24,-1.25和+2.01。差异最小的是B点,其次是C点,差异最大的是B1点,其次是F点。经分析,两种方法各测量点的长度位置和测量点的最大周长存在一定的差异。如表4所示,B点检测结果的平均值差异最小,其原因是脚踝关节处的压缩袜设计时,在脚踝位置的一定长度范围内的压力值是一致的,因此,尽管两种方法测量点在长度位置上相差2cm,但实际检测结果差异最小。两种方法在C点的长度位置和最大周长相似。然而在B1点上,方法2的测量点在长度方向的位置上比方法1低4cm,且最大的周长大1cm,因此,方法2所检测的结果比方法1检测的结果要大,这是因为压缩袜越接近B点,其压缩力也越大,符合压缩袜呈梯度循序减压的设计。方法2中F点的检测结果比方法1小2.01mmHg,其主要原因是方法2的测量点的最大周长比方法1的测量点的最大周长小2.3cm。
同时,也注意到方法1各个测量点每组检测结果之间的差异分别是2.07,1.52,1.57和1.43;而方法2各个测量点每组检测结果之间的差异分别是3.84,2.56,2.81和1.63。方法2各个测量点检测结果的离散性比方法1大。分析原因是,方法1检测的拉力F1是第六次循环在Lmax处的拉力(2×织物中受力),而方法2是压缩袜在检测仪器上连续完全伸展3次后,检测传感器测量的压缩袜单层的压力值,尽管方法2中压缩袜在检测仪器上连续完全伸展3次,但实际上检测仪器的腿形模型上两层压缩袜之间存在轻微的松紧,而影响的检测结果的稳定性和精确性,而方法1所检测的拉力是两层织物的受力,因此两层压缩袜之间存在轻微的松紧,对检测结果的影响小,相比方法2,检测结果更精确,组间结果更稳定。

表3. 两种检测方法结果比较(mmHg)

表4. 两种测量方法最大周长和长度位置的差异比较(cm )
两种各个测量点的比占压力,即相对B点压缩力值的百分比如下表5。两种方法各个测量点的比占压力均符合标准要求,方法2的测量点B1位置在长度方向上更接近B点,因此,该测量点的比占压力平均值为92.41%,比方法1该测量点的比占压力平均值87.17%,高5.24%,而方法2的测量点F点的最大周长比方法1的测量点F点的最大周长小2.3cm,在该测量点的比占压力平均值为30.27%,比方法1该测量点的比占压力平均值38.76%,低8.49%。
关于前2种方法与方法3的检测结果的比较,笔者公司委托德国海因斯坦研究院按方法3对一些产品进行了检测,并取得了检测结果。同时,笔者对委托检测的同批产品,采用方法2也进行了检测。两种检测方法的检测结果均满足标准要求,但也存在一定的差异。方法3的检测传感器多达20个,可以检测到压缩袜每一个部分的压缩力值,并通过曲线图描出种点压缩力值的变化趋势,有助分析袜子不同点的压缩力,为袜子压缩力的精准设计提供有效的数据支持。
5.各种方法优缺点
各种方法优缺点,见表6。
6.展望
以上三种方法是基于拉普拉斯公式将拉力(弹力)转化为压力缩力的测量方法,目前还有一种名为MST系列的压缩袜的压缩力检测仪器,其工作原理是建立一套标准的木制腿模,将用于测压缩力的薄膜探头贴在腿模上,在腿模上套上压缩袜,然后对薄膜探头进行充注压缩空气,记录测量点处压缩空气克服压缩袜产生的压缩力值。这种方法测量方便,快捷,但薄膜探头上的测量点固定,不适用于测量不同长度要求的袜子,另外,薄膜探头上的测量点只是腿模上一个点,测量结果受测量点处袜子围周方向的松紧影响较大。综合以上几种测量方法的优缺点,笔者总结了理想的压缩袜压缩力测量装置的特点如下:①操作方法简单,便捷;②适用于所有形状,尺寸和长度的袜子;③沿着袜子长度方向,各测量点的位置可根据压缩袜的长度要求任意调节;④各测量点的的周长可根据压缩袜的规格要求任意调节;⑤测量点所测的压缩力是测量点位置处压缩袜沿圆周施加的压缩力;⑥一次操作可测量所有测量点,测量结果为压缩力;⑦不破坏压缩袜。
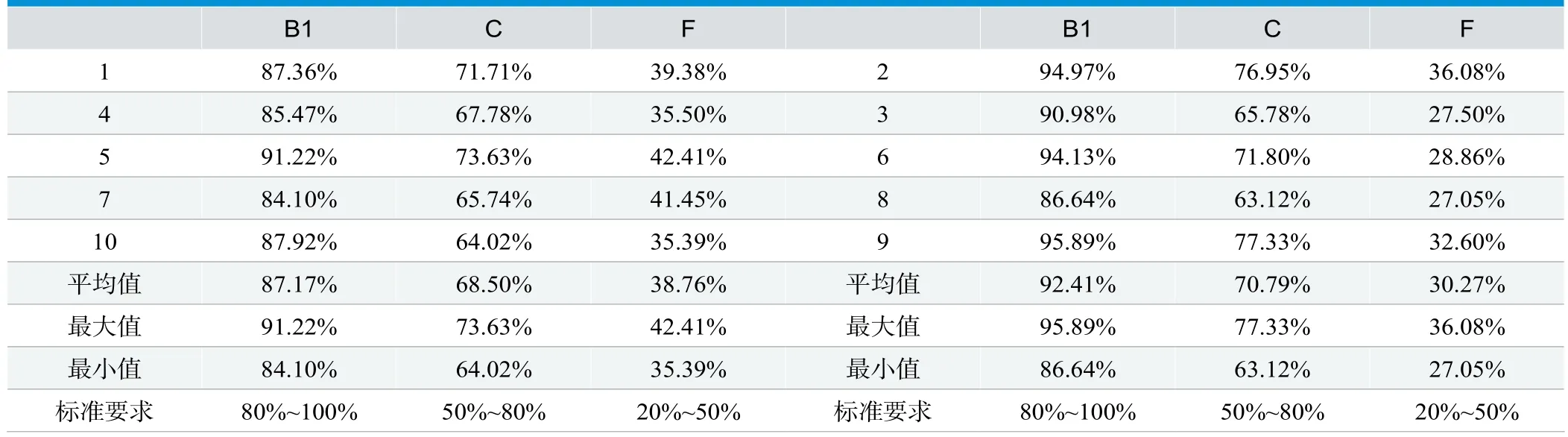
表5. 两种各个测量点的比占压力比较
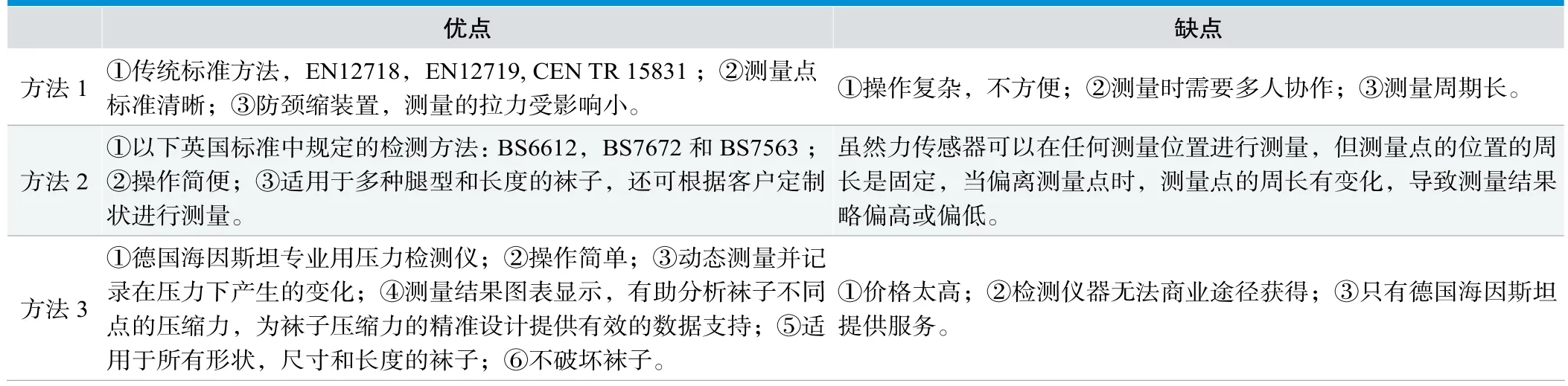
表6. 三种方法优缺点汇总
猜你喜欢
医疗装备(2023年15期)2023-08-23 08:59:00
航空学报(2022年5期)2022-07-04 02:24:32
疯狂英语·新读写(2021年8期)2021-11-05 08:44:26
纺织检测与标准(2020年4期)2020-08-30 07:50:46
幽默大师(2020年6期)2020-06-22 08:24:32
科教新报(2020年21期)2020-06-05 14:16:07
模具制造(2019年10期)2020-01-06 09:13:08
自动化与仪表(2019年2期)2019-03-06 08:24:26
数字通信世界(2019年1期)2019-02-14 02:00:38
学苑创造·A版(2017年12期)2018-01-17 19:18:30