基于升轨方式的低轨卫星主动离轨处置策略
2018-04-24 12:49张国云樊恒海蔡立锋张国龙王大鹏祝俊淞
航天器工程 2018年2期
张国云 樊恒海 蔡立锋 张国龙 王大鹏 祝俊淞
(西安卫星测控中心,西安 710043)
随着低轨卫星数量的逐年增加,有限的近地空间资源日趋紧张,在轨运行卫星碰撞概率不断增大,碰撞预警和规避控制日趋常态化。对已结束在轨服务或已退役的卫星进行主动离轨处置,不仅可以减小其与在轨正常工作卫星可能的碰撞风险,确保当前在轨运行卫星及后续发射与运行任务的安全,同时还可释放占用的空间资源,为其他卫星及后续卫星留出轨道位置[1-4]。
目前,高轨卫星的主动离轨处置主要通过抬高轨道高度(升轨方式)或者轨道高度与倾角联合控制等方式,将退役卫星推入坟墓轨道,进行钝化处置[2]。低轨卫星的主动离轨处置主要通过降低轨道高度,依靠大气阻力作用使卫星再入大气层烧毁。然而,采用降轨方式进行主动离轨处置时,存在两方面问题:①随着轨道高度的降低,空间碎片及在轨卫星数量逐渐增加,待离轨低轨卫星会威胁到在轨正常运行的卫星,尤其在轨道高度降低到900 km左右时,空间碎片数量发生跃变,发生碰撞的概率大大增加;②根据机构间空间碎片协调委员会(IADC)编订的《IADC空间碎片减缓指南》,低轨卫星在任务完成后主动离轨,需要在25年内再入大气层烧毁[5]。对于轨道高度大于900 km的低轨卫星,若在大气阻力作用下使其自然衰减,需要花费上千年的时间,大大超过25年以内的要求。若采用升轨方式的离轨处置策略,可以避免以上两个问题。对于低轨卫星,升轨方式的离轨处置策略在苏联卫星的核反应堆舱段上应用过,核反应堆舱段从200 km机动到约1000 km的轨道高度,以防止其污染地球环境[6];而对于低轨整颗卫星的升轨方式主动离轨处置策略,以及后续的协调策略,还未有详细分析。
本文基于卫星长期管理过程中的工程应用实践,提出了升轨方式的低轨卫星主动离轨处置策略。在综合考虑轨道高度、剩余燃料、碰撞风险及离轨后器件在轨寿命考核,以及空间科学试验价值的基础上,进一步提出了“保能源、保燃料、保测控”的协调策略。最后,以已退役的某低轨卫星为例,对提出的离轨处置策略进行了验证。
1 主动离轨处置策略
对于低轨卫星在完成任务后进行离轨机动,IADC仅给出了原则性的处理要求与建议,至于目标轨道参数,可由各卫星所属机构自行研究决定。由于整星采用升轨方式进行离轨控制无经验可循,因此,目标轨道区域主要根据空间碎片及在轨卫星数量与轨道高度的关系,以及燃料受限情况确定。目标轨道高度确定后,还要确定相应的轨道转移方式。同时,考虑到离轨后空间科学和应用试验的需要,卫星进入目标轨道后,还要有相应的安全处置策略。按照“保能源、保燃料、保测控”的协调策略,提出对离轨后低轨卫星的安全处置策略。离轨处置过程如图1所示。
1.1 离轨目标轨道区域确定
图2给出了在500~1400 km的空间碎片及在轨卫星数量随轨道高度(h)的变化关系。由图2可得,h约为900 km时,空间碎片及在轨卫星数量发生跃变。因而,若将待离轨卫星自h约为900 km向下调整时,降轨控制过程需要消耗较多燃料,若出现燃料不足的情况,将不能完成后续离轨操作,且无法将卫星送至25年陨落地面的轨道上。另外,随着h的不断减小,碰撞的可能性大大增加,会威胁到在轨正常运行的卫星[7]。由此可见,在燃料受限的情况下,应考虑升轨方式,升轨后的轨道高度分布的卫星相对较少,碰撞概率较小。在h低于1200 km的空间中,空间碎片及在轨卫星数量明显较多,当h在1300~1400 km时,空间碎片及在轨卫星数量又有所增加。综合以上,对于h高于900 km的卫星,主动离轨后目标区域范围为h低于1300 km。
1.2 轨道转移方式
根据卫星轨道控制原则和轨道控制动力学特性,为保证偏心率稳定,相邻2次控制时刻的轨道相位差应保证约为180°。实施双脉冲共面变轨最优的方式为霍曼变轨[8],霍曼变轨在理论上也是圆轨道之间最节省燃料的变轨方式[9],因而选择霍曼变轨将待离轨卫星转移到目标轨道。
待离轨卫星变轨的基本原理如图3所示,O为地心;R1为离轨前卫星轨道地心距;R2为实际离轨控制后进入的轨道地心距;ΔV1和ΔV2为2次变轨时刻对应的速度增量。在A1对卫星施加第一脉冲速度增量ΔV1,抬高卫星近地点,进入椭圆形的转移轨道,该椭圆分别与两圆相切,切点即为转移轨道的近地点和远地点。卫星沿转移轨道运行至A2,此时A2成为卫星新轨道的远地点,施加第二脉冲速度增量ΔV2,卫星进入目标轨道,变轨结束。
根据霍曼变轨理论,计算可得卫星双脉冲速度增量为[10]
(1)
式中:地球引力常数μ=3.986 005×1014。
实际上,进行卫星离轨控制时,要采用多批次小控制量两脉冲霍曼变轨,逐渐抬高卫星轨道高度,最终达到目标轨道。
1.3 离轨后安全处置策略
考虑到离轨后应急处置和空间科学试验的需要,确定了“保能源、保燃料、保测控”的协调策路。①保能源:采用将太阳电池阵对准太阳的方式保证电能充足;②保燃料:在满足太阳电池阵对日条件下,使卫星按照一定的角速度旋转,构成足够大的角动量,以保持姿态稳定,避免使用喷气控制消耗能源;③保测控:卫星的自旋角速度在一定范围内,以满足卫星的测控条件。“保能源、保燃料、保测控”的要求,互相制约,形成合理的处置策略。
1.3.1 保能源
为便于分析,建立卫星本体坐标系ObXbYbZb和轨道坐标系OoXoYoZo,卫星质心为Ob(Oo)。为保证较好的光照,起旋前,先将卫星本体绕偏航轴负向转动90°,并将两副太阳电池阵驱动到270°后停转,这时太阳电池阵的电池片法线是指向卫星本体的,即轨道坐标系(OoXoYoZo)的-Yo方向(太阳方向),见图4。太阳电池阵调整后,对着太阳,可确保卫星电能供给。
1)离轨前后飞行状态对比分析
图4(a)表示出了3轴对地稳定飞行过程中卫星运行状态与太阳电池阵的位置关系。在此过程中,卫星本体坐标系中3轴指向与轨道坐标系3轴指向保持一致。在图4(b)中的自旋状态下,卫星绕本体坐标系Xb轴旋转,卫星本体坐标系Yb轴指向卫星飞行方向。
2)降交点地方时漂移对光照条件的影响分析
在轨运行过程中,由于太阳引力摄动,卫星倾角会发生长期的缓慢变化,进而引起降交点地方时漂移。因此,需要计算出目标轨道降交点地方时的变化,判断太阳电池阵光照条件。
1.3.2 保燃料
由自旋刚体定向性和稳定性原理可知:在没有外力矩作用时,当且仅当卫星本体以惯量主轴为转轴时,转轴才具有定向性;当卫星本体自旋轴为其最大惯量主轴或最小惯量主轴时,卫星旋转状态才是稳定的[11]。考虑到实际空间环境的复杂性,且卫星带有太阳翼等挠性附件,分析中不能简单作为刚体处理。进一步根据半刚体卫星自旋稳定原理可知:任何形状的卫星本体,只有绕最大惯量主轴的自旋才具有稳定性。
1)卫星惯量主轴计算与自旋轴确定
利用卫星质量和惯量特性,计算3轴主惯量IXb,IZb,IYb(惯性坐标系在本体坐标系下的投影),三者最大值即为卫星旋转惯量主轴。根据卫星特点及推力器安装布局,为满足自旋条件,同时考虑将来消旋可能对燃料的消耗,在确保对测控影响较小的前提下,可通过滚动轴喷气使卫星本体绕惯量主轴以自旋角速度旋转,自旋稳定后将卫星推进系统关闭,保证燃料的零消耗。
2)卫星自旋角速度选择原则
根据卫星刚性设计原则,自旋角速度小于等于9 (°)/s,否则存在解体的可能性。为了便于监测自旋角速度,角速度应保持在卫星测量部件测量范围之内,且要考虑地面设备测控跟踪的有效性。卫星自旋后,自旋角速度长期受到外力矩(太阳光压等)的影响并呈增加趋势,因此还要考虑将来对卫星消旋处置的燃料消耗。
3)估算角动量与卫星本体坐标系3轴的夹角
卫星在本体坐标系下的惯量张量及卫星本体惯量参数为
(2)
卫星的角动量H和角速度ωb分别为
(3)
式中:ωXb,ωYb,ωZb为惯性坐标系下3轴角速度在本体坐标系下的投影。
通过计算,可得角动量H与卫星本体坐标系3轴的夹角及H的变化趋势。同时,通过在轨数据验证,自旋轴与最大角动量方向基本一致,卫星本体绕其最大惯量主轴旋转,能够长期保持自旋稳定。
1.3.3 保测控
测控条件需要分析干涉区,当卫星侧旋至干涉区对地时,有可能导致地面遥测信号的短暂失锁和遥控信号的闪锁断,因此要计算闪锁断时间及闪锁断次数。如图5所示,卫星测控信号在卫星本体坐标系-Zb轴方向半球内存在11°左右的2个干涉区,在角速度为自旋状态下,若自旋角速度为1 (°)/s,闪锁断时间约为11 s。因此,在卫星旋转一周的6 min弧段内将会出现2次闪锁断。
注:最外圈圆外数值表示偏离±Zb轴指向(角度),单位为(°);实线圆表示不同指向上的增益,单位为dBi。
图5 测控天线方向图
Fig.5 Pattern of TT&C antenna
2 试验验证结果及分析
根据确定的主动离轨处置策略,对已退役的某太阳同步轨道卫星进行离轨控制。该卫星的轨道高度为1200 km,剩余燃料约32 kg(若按降轨150 km计算,要消耗燃料33 kg,届时将出现燃料不足的情况),降交点地方时为09:30,陀螺的角速度测量范围为[-2.5,+2.5](°)/s。
2.1 离轨控制效果评估
由于目标区域范围不大于1300 km ,综合考虑节省燃料用于后续空间科学试验的需要,试验时抬升轨道50 km,即轨道高度提高到1250 km,消耗燃料约13 kg(剩余约20 kg)。在该轨道高度分布的空间碎片数量较少,且轨道抬升后卫星轨道高度衰减时间大大增长(见表1)。
在轨道转移时,按两脉冲霍曼变轨实施控制,通过4次两脉冲霍曼变轨,将卫星轨道抬高进入预定高度,控制误差小于1%,剩余燃料能满足后续空间科学试验需要,确保离轨控制的安全性和有效性。离轨控制期间半长轴变化情况见图6。
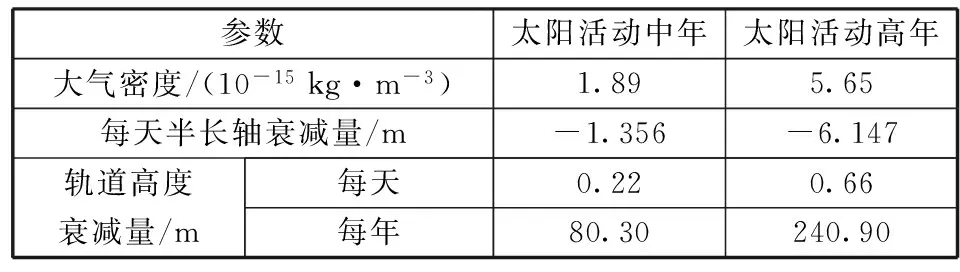
表1 调整后轨道高度衰减估计Table 1 Estimation of orbit altitude attenuationafter adjustment
2.2 离轨后安全处置结果评估
2.2.1 保能源
降交点地方时与太阳光照条件的关系,如图7所示[12],降交点地方时为00:00或12:00时,轨道平面大致与太阳光平行,而在06:00或18:00时,轨道平面大致与太阳光垂直。卫星太阳电池阵安装在卫星本体坐标系±Yb轴,方向与轨道面平行,因而当降交点地方时为06:00或18:00时,光照条件最好。经过数值仿真,主动升轨至轨道高度1250 km 后,3年内降交点地方时变化曲线见图8,降交点地方时向06:00方向漂移,太阳电池阵入射角逐渐减小,光照条件不断变好,卫星电源供给能力逐步提高。
2.2.2 保燃料
卫星3轴主惯量关系为IXb>IZb>IYb,卫星自旋轴为Xb。通过滚动轴正向喷气使卫星本体绕Xb轴以约1 (°)/s的角速度实现自旋。通过仿真分析,自旋轴角速度越大,章动角越小:自旋角速度约为1 (°)/s时,姿态角基本收敛,而在自旋角速度约为0.5 (°)/s时,姿态角有发散的趋势,如图9~10所示。其中:在图9(a)和图10(a)中,Yb轴和Zb轴的有交叠;在图9(b)和图10(b)中,Xb轴和Yb轴的有交叠。
确定自旋角速度约为1 (°)/s后,计算角动量H与卫星本体坐标系3轴的夹角及其变化趋势。将该卫星惯量张量及卫星本体惯量参数I代入式(3)中,计算可得角动量H与卫星本体坐标系3轴的夹角及角动量H的变化趋势,如图11所示。
由图11(a)~11(c)可见,角动量H与卫星本体坐标系Xb,Yb,Zb轴的夹角趋于1.5°,89.3°,90.4°。卫星不是纯刚体,由于能量耗散,角动量H最终集中在惯量主轴方向,沿Xb轴方向(即角动量H方向)自旋。通过在轨数据验证:自旋轴与最大角动量方向基本一致,卫星本体在绕其最大惯量主轴旋转时,能够长期保持自旋稳定,无需消耗燃料。
由图11(d)可知,角动量H幅值有逐步变大的趋势,当角速度增大到一定门限时,可进行消旋。最大角动量与卫星本体坐标系3轴夹角如图12所示。由于卫星受到外力矩(如太阳光压、重力梯度等)的长期影响,卫星姿态和自旋轴空间指向会随着时间推移发生缓慢变化,因此,对于卫星惯量主轴的确定,要建立相关模型,结合长期演化过程进一步分析。
2.2.3 保测控
卫星在-Zb轴方向半球内存在11°左右的2个干涉区(如图5所示),干涉区内增益有可能低于-12 dB的指标要求。如图13所示:当自旋角速度为3 (°)/s(卫星自旋一周需要2 min)时,整个跟踪弧段可能经历15次闪锁断(应答机自动增益控制(AGC)门限为-110 dBm),遥测接收和遥控上行会受到一定的影响,因而,为实现保测控目标,自旋角速度最好小于3 (°)/s。当自旋角速度为1 (°)/s时,闪锁断1次时间约为11 s,卫星旋转一周的6 min内会出现2次闪锁断,按照地面跟踪一轨15 min计算,整个跟踪弧段可能出现5次闪锁断。因此,自旋角速度为1 (°)/s能够保证遥控上行的正确性和遥测接收的连续性,在轨数据与预期一致。
3 结论
本文提出了一种基于升轨方式的低轨卫星主动离轨处置策略,通过对处置策略的分析及成功的工程实践应用,得到如下结论。
(1)对于在低轨中较高轨道的卫星,升轨方式可以较快完成离轨处置,解决单靠大气阻力无法实现25年内再入大气层的问题,为后续进入此轨道的卫星留出轨道空间,同时减少碰撞风险。
(2)目标轨道区域主要根据空间碎片及在轨卫星数量与轨道高度的关系,以及燃料受限情况确定。考虑到节省燃料,轨道转移通过多次霍曼变轨实现。
(3)在保能源中,主要满足太阳电池阵对准太阳;在保燃料中,使卫星按照一定的角速度自旋,构成足够大的角动量,以保持姿态稳定,从而避免使用喷气控制消耗燃料,但需要选择合理的自旋轴空间指向和自旋角速度;在保测控中,卫星的自旋角速度在一定范围内可满足测控条件。
由于卫星受到外力矩(如太阳光压、重力梯度等)的长期影响,卫星姿态和自旋轴空间指向会随着时间推移发生缓慢变化,建立相关模型,确定卫星惯量主轴,结合长期演化过程进一步分析,是后续需要解决的问题。
参考文献(References)
[1] 周静,杨慧,王莉云.中高轨道卫星离轨参数研究[J].航天器工程,2013,22(2):11-12
Zhou Jing, Yang Hui,Wang Liyun. Study on deorbit elements of medium earth orbit satellites [J].Spacecraft Engineering, 2013, 22(2): 11-12 (in Chinese)
[2] 罗刚桥.地球静止轨道卫星寿命末期离轨方案研究[J].航天器环境工程,2005,22(2):73-76
Luo Gangqiao.De-orbit project of GEO satellite in the end of lifetime [J]. Spacecraft Environment Engineering, 2005, 22(2): 73-76 (in Chinese)
[3] 张玉军,冯书兴.主动式空间碎片清理研究[J].装备指挥技术学院学报,2010,21(6):78-80
Zhang Yujun, Feng Shuxing. Research on active space debris removal [J]. Journal of Academy of Equipment, 2010, 21(6): 78-80 (in Chinese)
[4] 雷建宇,张永,郑世贵,等.载人航天器空间碎片防护与减缓设计[J].航天器环境工程,2012,29(4):388-391
Lei Jianyu, Zhang Yong, Zheng Shigui, et al. Space debris shield and mitigation of a manned spacecraft [J]. Spacecraft Environment Engineering, 2012, 29(4): 388-391 (in Chinese)
[5] IADC. IADC space debris mitigation guidelines [EB/OL]. [2017-04-21].http://stage.tksc.jaxa.jp/spacelaw/kokusai_utyu/space_debris2/IADC.pdf.
[6] 百度百科.核动力卫星[EB/OL].[2017-04-21].https://baike.baidu.com/item/核动力卫星/3323111?fr=aladdin
Baidu Baike. Nuclear-powered satellite[EB/OL].[2017-04-21].https://baike.baidu.com/item/核动力卫星/3323111?fr=aladdin (in Chinese)
[7] 刘林,杨建,王建华.近地轨道空间碎片清除策略分析[J].装备学院学报,2013,24(2):70-73
Liu Lin, Yang Jian, Wang Jianhua. Research on space debris mitigation strategy in LEO [J]. Journal of Aca-demy of Equipment, 2013, 24(2): 70-73 (in Chinese)
[8] 杨嘉墀.航天器轨道动力学与控制[M].北京:中国宇航出版社,1995:100-105
Yang Jiachi. Dynamics and control of spacecraft orbit [M]. Beijing: China Astronautics Press,1995: 100-105 (in Chinese)
[9] 肖业伦.航天器飞行动力学原理[M].北京:中国宇航出版社,1995:72-88
Xiao Yelun. Theory of spacecraft flight dynamics [M]. Beijing: China Astronautics Press, 1995:72-88 (in Chinese)
[10] 褚桂柏.航天技术概论[M].北京:中国宇航出版社,2002:312-315
Chu Guibai. Space technology introduction [M]. Beijing: China Astronautics Press, 2002:312-315 (in Chinese)
[11] 樊恒海,魏俊,冀蓉,等.海洋二号卫星重大故障抢救姿态恢复与轨道捕获控制技术[R].西安:西安卫星测控中心,2014:4-10
Fan Henghai, Wei Jun, Ji Rong, et al. Failure to rescue,attitude recovery and orbit capture control techno-logy of HY-2 satellite [R]. Xi’an: Xi’an Satellite Control Center, 2014:4-10 (in Chinese)
[12] 张国云,蔡立锋,黄晓峰,等.近圆太阳同步卫星轨道倾角偏差的影响和调整[J].上海航天,2014,31(2):37-41
Zhang Guoyun, Cai Lifeng, Huang Xiaofeng,et al. Impact analysis and adjustment of nearly round sun-synchronous orbit satellite injection inclination devia-tion [J]. Aerospace Shanghai, 2014, 31(2): 37-41 (in Chinese)
猜你喜欢
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
导航与控制(2019年2期)2019-06-12
科学之谜(2019年2期)2019-03-25
成长·读写月刊(2019年1期)2019-01-28
中学课程辅导·教师通讯(2018年10期)2018-09-04
科技资讯(2017年25期)2017-10-20
中学生数理化·高一版(2017年3期)2017-07-08
太空探索(2016年12期)2016-07-18
新高考·高一物理(2016年3期)2016-05-18
新高考·高一物理(2016年3期)2016-05-18