基于加速度信号多特征踝关节动作模式识别*
2018-04-20 05:48:29于志鹏乔晓艳
测试技术学报 2018年2期
于志鹏, 乔晓艳
(山西大学 物理电子工程学院, 山西 太原 030006)
人机交互(HCI)[1]实现用户与计算机之间进行信息交换的方式, 是虚拟现实技术研究的核心内容之一. 基于加速度信号的人体动作识别是一种自然的人机交互方式, 利用含有加速度传感器的测量设备, 采集人体执行不同动作对应关节活动的加速度信号, 通过信号的预处理、 特征提取、 模式识别等技术的相互融合, 实现下肢动作识别, 它在医疗康复训练、 虚拟现实游戏、 智能监控等领域有重要的应用价值[2].
人体动作模式识别技术的研究, 其信号源主要涉及生理信号、 图像信号和力学信号等. 相比其他来源的信号, 加速度信号的数据获取方式简单、 采集设备便携、 用户体验感舒适, 已经成为科研工作者研究的热点[3]. 目前, 对于信号特征的提取主要涉及时域、 频域、 时频域等多个方面. 时域特征通常具有明确的物理意义, 如均值、 均方根值、 方差、 阈值、 幅度峰值、 幅度均值、 相关系数等. 频域特征包括中值频率、 平均功率频率、 FFT系数、 频域熵等. 时频分析能够同时兼顾信号的时域和频域信息, 可以较为全面地刻画信号的特征[4]. Khan[5]等通过建立加速度向量自回归( auto regressive, AR) 模型, 提取 7维扩充特征向量, 利用人工神经网络和线性分类器分别进行动作状态判别; 梁维杰[6]等人通过加速度传感器跌倒检测装置, 检测老年人在正常活动和跌倒状态下的加速度信号, 采用支持向量机分类器, 判断跌倒的准确率可以达到90%以上. Jung Keun Lee[7]通过三轴加速度传感器研究人体滑倒、 绊倒、 被人撞倒、 失去平衡跌倒、 失去重心跌倒5种不同跌倒动作模式, 根据阈值检测方法判别人体是否跌倒, 准确率可以达到 95%. 然而, 基于加速度信号的人体下肢动作模式识别, 目前特征选择较为单一, 分类器动作模式分类也较为简单, 多数为二分类问题, 这些限制了它的广泛应用.
本研究采集踝关节执行趾屈、 背伸、 内翻和外翻4种动作模式的三轴加速度信号, 通过提取其绝对积分平均值、 方差、 两轴之间的相关系数以及幅度峰值和幅度均值5种时域特征参量, 融合组成11维的特征向量输入支持向量机分类器, 对下肢踝关节4种不同动作模式进行4分类识别, 获得了较高的动作识别正确率.
1 实验数据采集
本研究选择身体健康状态良好的大学生作为受试者, 所有被试在相关骨骼、 肌肉、 神经系统等方面均无任何疾病, 且在实验前2h内没有做过剧烈运动, 避免由于神经或肌肉过度疲劳紧张而影响测试结果.
实验设备选用美国DELSYS公司的16通道人体生理信号采集系统, 该系统可以完成对加速度(ACC)信号的检测, 具有较高的精确度和可靠性. 加速度信号采集框图如图 1 所示, 受试者依据实验范式执行踝关节对应的4种动作, 传感器采集相应动作的三轴加速度信号, 通过16通道信号采集系统传递到计算机中进行处理.

图 1 下肢踝关节ACC信号采集框图Fig.1 ACC signal acquisition block diagram of lower limb ankle
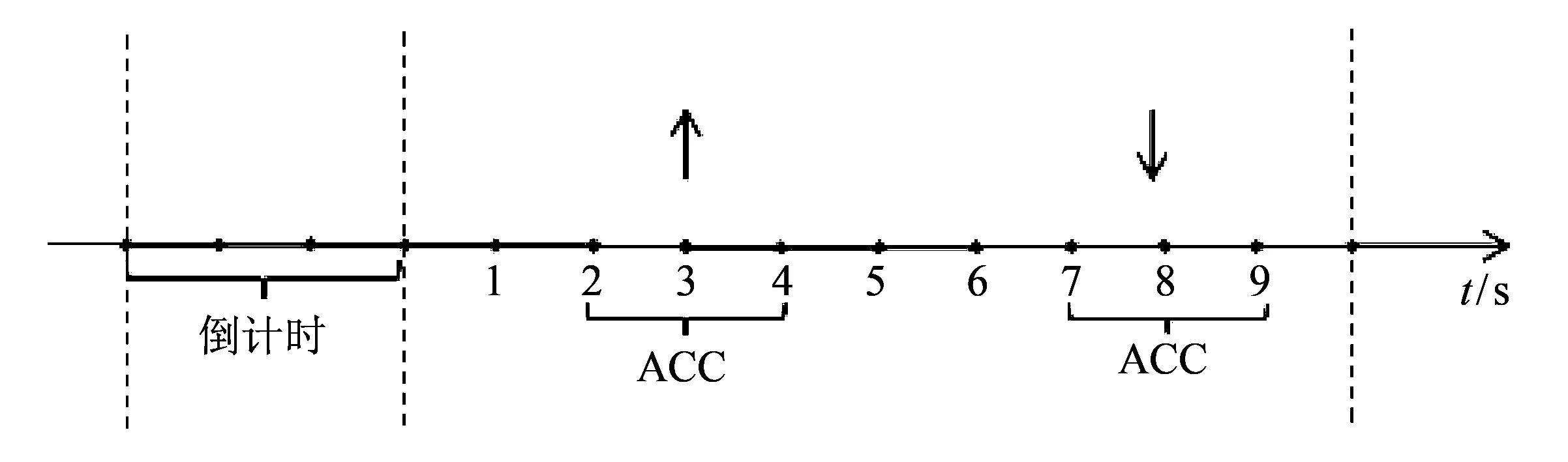
图 2 踝关节动作实验范式Fig.2 Signal acquisition experimental paradigm
将传感器竖直向上贴附在踝关节内侧上方约1 cm处, 当踝关节分别执行趾屈、 背伸、 内翻和外翻4种动作时, 采集执行对应动作的ACC信号. 踝关节动作实验范式如图 2 所示, 受试者在执行动作之前先进行3 s倒计时准备, 调整状态, 避免下肢抖动而影响测量结果. 倒计时结束后开始试验计时, 当时间到达3 s时, 发出提示音开始执行相应动作并且保持动作状态5 s, 当时间到达8 s时提示执行复原动作, 到达10 s时结束. 显然, 在第3 s和第8 s踝关节动作执行状态加速度幅值变化最大, 动作保持状态的加速度大小约为零. 选择踝关节起始动作的2~4 s时间段内的ACC数据点进行截取, 由于ACC信号的采样频率为150 Hz, 故采样点为300个. 本文选取加速度信号明显变化的300个数据点进行特征提取.
实验选用5名受试者, 每位受试者每种动作进行了20组实验, 故每种动作可以得到100组实验数据, 完成4种踝关节动作共计得到400(20*5*4)组ACC数据. 图 3 为完成趾屈动作对应的x,y,z三轴ACC的原始信号以及采用小波去噪后得到的三轴ACC信号, 图中纵坐标单位为g, 1 g=9.8 m/s2.
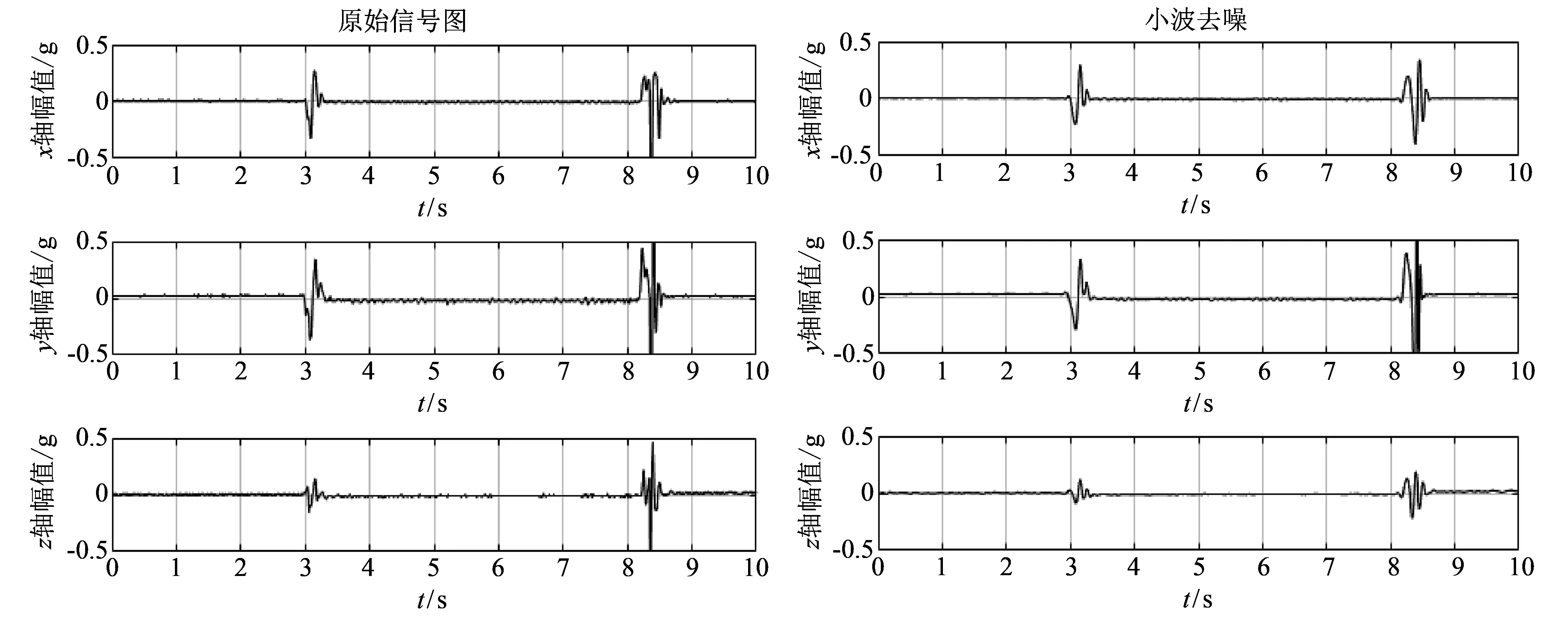
图 3 趾屈动作所对应的三轴加速度信号图Fig.3 Triaxial acceleration signal diagram of toe flexion movement
2 算法理论分析
2.1 特征提取
为实现较好的动作分类效果, 加速度信号特征提取选用时域分析方法, 将绝对积分平均值(AVA)、 方差(VAR)、 两轴之间的相关系数(Corr)以及幅度峰值(SMV)和幅度均值(SMA)5种特征参数进行特征层的融合, 共同组成11维特征向量, 用于对应踝关节动作模式识别. 由于采集到的加速度信号分别是x,y,z三轴加速度, 代表三个维度信息, 因此提取特征参数时, 需要考虑到各维度数据信息, 具体特征向量参数的计算公式为
AVA=[AVAx,AVAy,AVAz],
(1)

VAR=[VARx,VARy,VARz],
(2)

Corr=[Corr(x,y),Corr(x,z),Corr(y,z)],
(3)

(4)
式中:Xi,Yi,Zi分别表示第i时刻三轴加速度采样点.
(5)
式中:T为截取的时间间隔, 本文T=2 s;x(t),y(t),z(t)分别表示对应三轴加速度幅值的大小.
本文提取的加速度信号特征参数如表 1 所示.

表 1 特征向量参数
2.2 支持向量机
支持向量机(SVM)是一种基于统计学理论的有监督式的机器学习方法, 通过寻求结构化风险最小的原则来提高学习机泛化能力, 从而满足经验风险和置信范围的最小化, 使得在较少的样本数量下, 能获得较好的统计规律[8].
SVM基本思想可由图 4 所示的二分类情况来说明. 图 4 中, 实心点和空心点代表两类不同数据样本,H为分类线,H1和H2为平行于分类线且离分类线最近的两类数据样本所在直线, 两直线间的距离为分类间隔(margin).
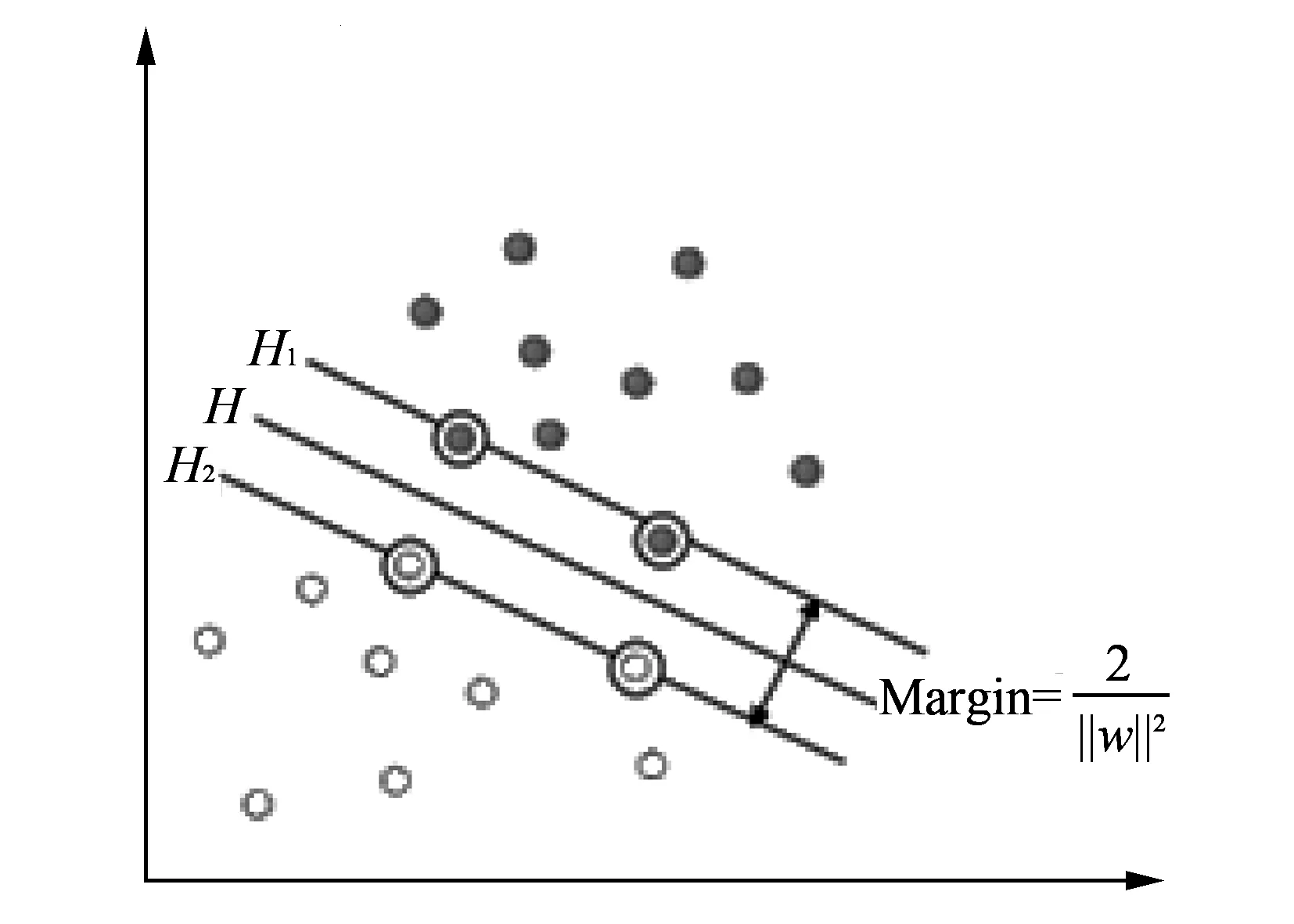
图 4 线性分类器模型Fig.4 Linear classifier model
设两类线性样本集为(xi,yi),i=1,2,…,n,x∈Rn, 分类结果为yi∈{-1,+1},n维空间线性判别函数的一般形式为f(x)=ω·x+b, 则分类超平面方程为
ω·x+b=0.
(6)
对判别函数进行归一化处理, 使得离分类面最近的样本满足|f(x)|=1, 要使所有样本正确分类, 则应该满足
yi[(ω·xi)+b]≥1,i=1,2,…,n.
(7)
(8)
通过Lagrange乘子算法最终求得最优解
(9)
确定最优分类面函数为
(10)
式中:αi为每个样本对应的Lagrange乘子式;ω*,b*为最优分类超平面的法向量和偏移量. 用内积K(xi,x)替代最优分类面中的点积, 相当于将原特征空间变换到另一个新的特征空间, 相应的判别函数式为
(11)
此时所得的最优分类就是支持向量机分类算法, 其中K(xi,x)为核函数. 通过核函数的引入, 可以很好地解决高维问题, 将高维空间的内积运算转化为低维空间的函数运算.
3 加速度信号特征分析
根据2.1节中的计算公式, 提取不同动作的踝关节三轴加速度特征参数, 并对绝对积分平均值(AVA)、 方差(VAR)、 两轴之间的相关系数(Corr)以及SMV峰值和信号SMA均值这5种特征参数进行分析, 得到踝关节4种动作对应各特征参数的均值与标准差, 如表 2 所示.
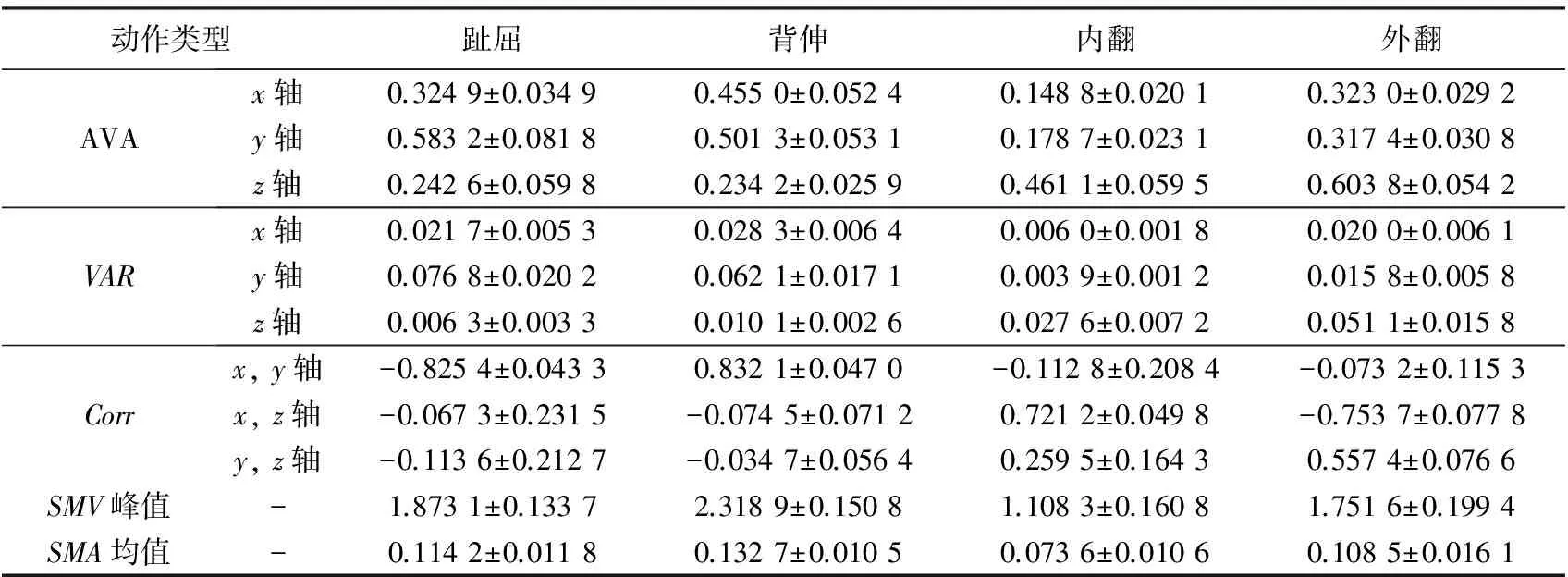
表 2 加速度特征参数统计特性(均值±标准差)
由表 2 可以明显看出: 内翻动作对应的三轴AVA数据差异相比其他3种动作差异较明显, 外翻动作的Z轴数据差异更大, 容易区分, 趾屈和背伸两种动作差异较小, 不易区分. 就VAR而言, 4种动作对应数据变化较小, 趾屈、 背伸两种动作较内翻和外翻差异较小. 由于Corr值的大小存在正负不同情况, 不同动作对应的方向也不相同, 加速度特征值变化明显, 比较容易对4种动作进行分类. SMV峰值能够较好地反应在某一时刻运动的剧烈程度, 表中数据显示: 内翻动作对应SMV峰值最小, 其动作幅度也最小, 而趾屈和外翻两种动作差异较不明显. SMA均值能够表征单位时间内身体运动的剧烈程度, 同样显示内翻动作剧烈程度最小, 而背伸动作对应剧烈程度最为明显.
分别将AVA, VAR, Corr特征参数向量制成三维散点图, 如图 5 所示. 图 5 中4种散点分别代表踝关节4种不同动作, 每种动作选取的样本数为60个. 从图 5 中可以看出, 加速度信号的AVA特征能够较好地区分内翻和外翻两种动作, 趾屈和背伸有着较好的聚类特性, 但不易区分. VAR特征能够把趾屈和背伸两种动作同另外两种动作较好地区分开, 但趾屈和背伸两种动作之间不易区分. Corr特征能够将4种动作明显区分开, 且具有良好的聚类特性.

图 5 ACC特征三维散点图Fig.5 Three-dimensional scatterplot of ACC feature
4 识别结果分析
在特征空间维数较高的情况下, 支持向量机采用RBF核分类性能较好, 能够减少计算量[9]. 本文选用RBF核作为SVM的核函数, 通过网格搜索法得到最优核函数参数对(C,γ), 最终确立SVM判别模型. 本实验每种动作均有100个样本数据, 选取60个样本作为训练集, 其余40个样本作为测试集. 将每一种单一特征以及融合后的11维特征向量分别依次输入支持向量机, 进行踝关节动作分类, 结果如表 3 所示. 结果表明: 不同ACC特征对应的踝关节动作平均分类正确率不同, 对于5种单一特征的踝关节动作模式分类, Corr特征的分类结果最佳, 识别正确率最高可达到91.3%, VAR特征分类结果最差, 平均识别率仅为69.4%, 对于AVA, SMV, SMA这3种ACC特征, 平均识别率范围大致在80%到85%之间, 其中AVA对于内翻、 外翻两种动作的识别率最佳, SMV对于背伸和内翻两种动作识别率较好. 将5种特征向量融合起来组成11 b特征向量, 每种动作相应识别率均可达到90%以上, 动作模式分类正确率得到很大程度的提升. 由此可见, 基于加速度信号的踝关节动作模式识别, 将多特征有效地融合, 能够较好地提高动作识别正确率.

表 3 踝关节4种动作分类正确率
5 结 论
本文采集了下肢踝关节4种不同动作对应的加速度信号, 通过计算提取AVA, VAR, Corr, SMV, SMA 5种特征参数, 采用基于RBF核函数的支持向量机分类方法, 对ACC信号的单一特征以及融合后的特征向量分别进行动作模式识别. 实验结果表明: 基于加速度信号的融合特征实现动作模式判别能够获得较高的分类正确率. 该研究可以应用于机器人康复训练以及人体运动姿态分析等领域.
参考文献:
[1]张凤军, 戴国忠, 彭晓兰. 虚拟现实的人机交互综述[J]. 中国科学: 信息科学, 2016, 46(12): 1711-1736.
Zhang Fengjun, Dai Guozhong, Peng Xiaolan. Human-computer interaction summary of virtual reality[J]. Chinese Science: Information Science, 2016, 46(12): 1711-1736. (in Chinese)
[2]Bednarz T P, Caris C, Thompson J, et al. Human-computer interaction experiments- immersive virtual reality applications for the mining industry[C]. In: 24th IEEE International Conference on Advanced Information Networking and Applications. Perth, WA , 2010, 1323-1327.
[3]Xu R Z, Zhou S L, Li W J. MEMS accelerometer based nonspecific-user hand gesture recognition[J]. IEEE Sensors Journal, 2012, 12(5): 1166-1173.
[4]刘建, 邹任玲, 张东衡, 等. 表面肌电信号特征提取方法研究发展趋势[J]. 生物医学工程学进展, 2015, 36(3): 164-168.
Liu Jian, Zou Renling, Zhang Dongheng, et al. Research and development trend of feature extraction methods of surface electromyogrphic signals[J]. Progress in Biomedical Engineering, 2015, 36(3): 164-168. (in Chinese)
[5]KHAN Adil Mehmood, LEE Young-Koo. A triaxi alaccelero meter-based physical-activity recognition viaaugmented-signal features and a hierarchical recognizer[J]. IEEE Transactions on Information Technology in Biomedicine, 2010, 14( 5): 1166-1172.
[6]梁维杰, 张应红, 景晖. 基于支持向量机的跌倒检测方法研究[J]. 测控技术, 2014, 33(9): 33-35, 39
Liang Weijie, Zhang Yinghong, Jing Hui. Research on fall detection method based on support vector machine[J]. Measurement and Control Technology, 2014, 33(9): 33-35, 39. (in Chinese)
[7]Jung Keun Lee, Stephen N. Robinovitch, Edward J. Park. Inertial Sensing-Based Pre-Impact Detection of Falls Involving Near-Scenarios[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2015, 23(2) : 258-266.
[8]Chen J L, Jiao L C. Classification mechanism of support vector machines[C]. In: 5th International Conference on Signal Processing Proceedings. Beijing, China, 2000, 1556-1559.
[9]奉国和. SVM分类核函数及参数选择比较[J]. 计算机工程与应用, 2011, 47(3): 123-124, 128
Feng Guohe. Parameter optimizing for support vector machines classification[J]. Computer Engineering and Applications, 2011, 47(3): 123-124, 128. (in Chinese)
猜你喜欢
九江职业技术学院学报(2022年1期)2022-12-02 09:46:54
保定学院学报(2022年2期)2022-04-07 02:26:50
中国特种设备安全(2021年5期)2021-11-06 05:09:00
中老年保健(2021年7期)2021-08-22 07:42:36
装备制造技术(2021年4期)2021-08-05 07:39:54
许昌学院学报(2018年4期)2018-05-02 12:27:37
制造技术与机床(2017年11期)2017-12-18 06:46:39
中华建设(2017年1期)2017-06-07 02:56:14
中华骨与关节外科杂志(2016年6期)2016-05-17 06:11:12
中国民族医药杂志(2016年5期)2016-05-09 07:43:57