
能量受限的多移动设备无线充电路径规划方法
2018-04-13 10:03徐新黎崔永婷皇甫晓洁
小型微型计算机系统 2018年4期
徐新黎,崔永婷,皇甫晓洁,陈 琛
(浙江工业大学 计算机科学与技术学院,杭州 310023) E-mail:xxl@zjut.edu.cn
1 引 言
无线传感器网络已经被广泛应用于建筑结构健康监测、科学探索、环境监测和目标跟踪等各个领域.目前大多数无线传感器网络节点都是由电池供电,由于很多情况下不能及时更换电池,网络的寿命受到极大的限制.为了延长无线传感器网络的生命周期,不少能量采集的方法被提出来,如从周围环境中获取太阳能[1]、风能[2]和振动能量[3]等补充节点能量.然而,这些能量具有随时间变化的性质,其实用性仍然非常有限.
近年来无线能量传输技术[4]取得重大突破,为解决无线传感器网络能量问题提供了有效方案.利用无线能量传输技术的无线传感器网络也称可充电无线传感器网络(Rechargeable Wireless Sensor Networks,RWSNs),是指通过外部电源给节点无线供电的传感器网络[5-8].由于无线能量源的价格相对昂贵,大规模部署能量源为网络提供持续的能量供给成本较高.因此,在保证节点充电服务质量的前提下,最小化其整体充电成本,成为无线充电传感器网络发展与应用的关键[5].
目前可充电无线传感器网络研究中主要是引入一台移动可充电设备为传感器节点充电,使得网络中节点不会因为电量耗尽而死亡[6,7].通常,移动充电设备周期性地访问网络中的每个节点,并且在每个节点周围停留很短一段时间为节点无线充电.研究表明,小规模网络中部署单个移动充电设备进行充电可以保持网络寿命.但是,由于单个移动充电设备在充电功率、移动速度和整体能量上的限制,在大规模网络中无法保证每个传感器节点正常工作.针对上述问题,已有研究者应用多个移动充电设备进行充电规划.文献[8]针对多移动充电设备提出一种协作充电方案,在一维场景下将一个移动充电设备同时作为另一个移动充电设备的维护来进行能量接力,减少设备返回维护站的次数,从而提升使用效率.其后续工作通过构造最小权重哈密尔顿回路的方式拓宽至二维场景[9].但是文献[8]和文献[9]都没有考虑总的成本问题,且充电规划方法复杂度较高.文献[10]首次提出最小化移动充电设备问题(minimum mobile chargers problem,简称 MMCP),在给定无线可充电传感器网络和MC 的参数前提下,确定最少移动充电设备(MC)数量及其充电方案.后续工作证明了 MMCP 问题是NP 问题,并将MMCP 问题转换成 DVRP (distance-constrained vehicle routing problem) 问题,再利用已有的DVRP解决方法给出解决MMCP的近似算法[11],但DVRP只是MMCP的子问题[12].为此,文献[12] 针对MMCP提出了一种贪心充电方案(GCS).但文献[10]和文献[11]都没有考虑MC的旅行距离约束.
为保证网络中每个节点都能持续工作,考虑MC的成本和旅行距离受限等因素,以最小化无线充电设备数量为目标,本文提出了一种多个移动设备无线充电节点选择和路径规划的方案.
2 多移动充电设备无线充电调度模型分析
2.1 网络模型
考虑一种多移动充电设备的可充电无线传感器网络,图1为一般应用场景模型[11].假设n个节点随机分布在被监测区域内,节点之间通过多跳路由将数据发送给基站.多个移动充电设备从维护站出发,遍历待充电的节点集,依次为节点无线充电后回到维护站进行修整、补充能量.图1中黑色线段为移动充电设备行走路径,箭头方向为其行进方向.
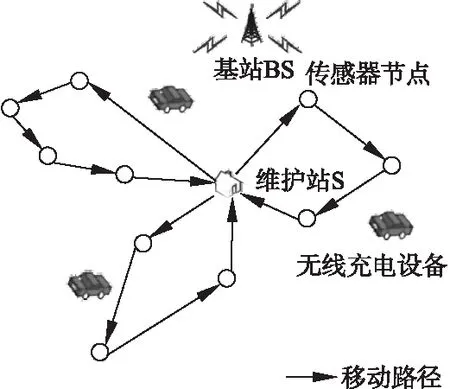
图1 多移动充电设备可充电传感器网络模型Fig.1 Rechargeable wireless sensor network model for multi mobile charging devices
对无线传感器和移动充电设备做如下假设:
1)节点具有唯一标识符,且具有位置感知能力和一定的存储能力;
2)节点位置固定,且装有磁耦合线圈,能接收无线能量;
3)节点支持二级通信功率,且当传输功率已知,节点可根据接收信号强度计算两节点间距离;
4)网络为对称网络,假设w(i,j)为无线充电设备从节点N(i)运行到节点N(j)花费的时间,则w(i,j)=w(j,i);
5)移动充电设备的电量有限,且行走和无线充电都需要耗能;
6)移动充电设备循环移动,从维护站出发,沿规划的轨迹匀速运行一周后回到维护站补充能量(更换电池或充电)为一个周期,且所有移动充电设备的充电功率相同.
2.2 耗电模型

(1)
其中,w(i,j)为移动充电设备从节点i行走到节点j所花费的时间.
移动充电设备m的一个完整充电周期τm为:
(2)
在t时刻,节点N(i)的耗电功率为pi(t),Cil为节点N(i)向节点N(l)发送数据时的功率参数,CiB为节点N(i)向基站发送数据时的功率参数,那么节点耗电功率为:
(3)
其中,Eelec为发送电路和接收电路能耗.
要使网络持续运行下去,必须满足网络中的每个节点电量在任意时刻不低于工作电量Emin,即:

(4)
其中,U为无线充电功率,M表示全部移动充电设备的集合.若充电设备l对节点i充电,则dli为1,否则为0.
假设移动充电设备m的能量容量为B,其行走的能耗功率为ηtsp,给节点无线充电时的能耗功率为ηc.那么,移动充电设备m在整个路径中的能耗都不低于B,即:
(5)
2.3 问题描述
假设|M|个移动充电设备从基站出发,沿规划的路径运行,并且以对经过的节点充满电为一个轮次.那么,对任意移动充电设备m,其运行时间满足公式(1)和公式(2),任意时刻节点的最低电量满足公式(4).在稳定阶段,节点的耗电量等于节点通过无线充电补充的能量,即:
(6)
综上,多移动充电设备充电调度问题可以描述为:
OPT-I:minN(i).E≥Emin
3 多移动充电设备无线充电调度算法设计
3.1 问题分析
很多研究已经证明单移动充电设备充电规划算法在网络规模较小时,能够使得网络持续工作而其节点不因为耗电过多而死亡.但是随着网络规模的增大——被监测区域增大或者网络中节点个数增多,算法的适应性明显下降,不能保证网络持续运行.由此可见,单移动充电设备充电路径规划算法对网络的寿命和节点的个数、网络的大小会有较强的限制,导致在复杂场景中的应用遇到瓶颈.因此,为了能够适应大规模网络的应用,增加移动充电设备个数势在必行.随着移动充电设备个数的增加,各种新的问题也接踵而来.例如,如何为每个移动充电设备选择合适的节点子集进行充电,如何规划每个移动充电设备的充电路径等.
针对多移动充电设备,本文提出了一种充电节点选择和路径规划方案,使其能够满足大规模无线传感器网络的需求,并且在保证大规模网络持续运行的前提下,使得移动充电设备数最小.
3.2 充电路径规划
多移动设备充电路径规划算法的基本思路是,首先利用集中式算法确定移动充电设备数和每个移动充电设备需要覆盖的传感器节点数,然后在运行过程中分布式动态规划每个移动充电设备的充电节点子集和充电路径.
由文献[13]可知,无线充电设备遍历路径构成最短Hamilton回路.采用实时性和准确性都较高的弹性网络算法[15,16]来构成Hamilton回路比较合理.求解Hamilton回路是一个旅行商问题(Traveling Salesman Problem,TSP)[15],是指给定N个城市的坐标,每个城市都被遍历且仅被遍历一次.弹性网络的思想是,将一条TSP路径看成是线圈上的点到二维平面上点的映射,那么,平面上每个点都能在线圈上找到一个或多个映射.这样,整个问题就变成了在特殊情况下,寻找几何空间映射最佳邻居节点的问题了.弹性网络算法就是一个迭代计算城市所在平面多点位置的过程.一开始的时候,线圈上的点组成一个很小的圆,并且位于城市所在平面的正中间.接着,线圈逐渐不规则扩大,每个点都朝着某个特定的城市移动.
线圈上的每个点都受到两个力的作用.一个是来自节点的引力,这个力使得点朝着距离自己最近的城市靠近;第二个是来自邻居点的张力,使得它向邻居节点靠近,从而使得整个线圈长度最短.这样,每个城市都与线圈上一个点的集合关联起来.城市与节点集合关联的紧密程度由城市与节点之间的距离决定,并且这种关联程度随着算法的迭代而变化.一开始,每个城市对点的作用都是相同的,随着算法的迭代,距离点较远的城市的作用力逐渐减小,距离点较近的点的作用力逐渐增强.这种逐渐增强的特性收到长度参数K的控制.弹性网络的迭代公式由下式表示:
(7)
其中,xi为点i的坐标向量,yj为点j的坐标向量,Δyj点j的偏移量.α和β为常量,分别表示点收到城市和邻居点的作用力强度.系数ωij表示城市i对点j的影响,通常是城市i和点j之间距离|xi-yj|以及K的函数,这个函数可以被标准化表示为:
ωij=φ(|xi-yj|,K)/∑kφ(|xi-yk|,K)
(8)
其中,φ(d,K)是关于d的正向有界函数,当d>K时趋近于0.
这里传感器网络节点N(i)的坐标表示为(N(i).x,N(i).y),弹性网络线圈上的点的坐标表示为(Y(i).x,Y(i).y).φ(d,K)取高斯函数,则关于弹性网络应用与本文无线传感器网络路径规划的迭代公式为:

(9)
dis(X(i),X(j))=[N(i).x-Y(j).x,N(i).y-Y(j).y]
(10)
ωij=φ(|dis(N(i),Y(j))|,K)
/∑kφ(|dis(N(i),Y(j))|,K)
(11)
φ(d,K)=e-d2/2K2
(12)
其中公式(10)中dis(X(i),X(j))表示矩阵.
基于弹性网络算法的充电路径规划具体过程为:
步骤1.收集各节点的ID、位置信息和维护站的位置信息并传递给基站;
步骤2.运行弹性网络算法求得维护站和全部传感器节点之间的TSP回路;
步骤3.调整回路起始位置为维护站,获得充电路径.
通过弹性网络算法在全部传感器节点和维护站之间形成一条Hamilton回路.移动充电设备从维护站出发,沿着之前规划好的路径依次遍历每个节点,并给节点充电,最后回到维护站进行修整.尽管弹性网络算法实时性好、准确性高,但是由于不同节点在不同时刻的能量消耗不同,仅仅是根据位置信息每轮遍历全部节点不能满足不同节点对能量补充的不同需求.因此,本文根据不同节点对能量的不同需求,选择需求最大的前k个节点进行无线充电.
每当节点向基站发送数据时,将剩余自身剩余能量和路由表加在报文头中发送给基站,基站保留每个节点最近剩余能量和路由表作为路径调度的输入.当移动充电设备位于维护站时(开始出发或者运行一周后回到维护站),综合考虑每个节点的剩余能量、节点的耗电功率以及节点与维护站的距离,计算出其路径权值权值,并按该权值升序排列,选择路径权值最大的前k个节点进行路径规划,移动充电设备依次遍历这k个节点而不是全网节点.
剩余存活时间预估公式为:

(13)
其中,cost(i)为节点N(i)的路径权值,dij为二值参数,若节点N(j)为节点N(i)的下一跳路由,则dij为1,否则为0.在公式(13)中,由于节点剩余能量与节点剩余存活时间成正比,分子部分为节点剩余能量;由于节点发送能耗与距离的二次方成正比,与节点剩余存活时间成反比,分母部分第一项为节点发送能耗的预估值;由于节点接收能耗与距离成正比,分母第二项为节点接收能耗的预估值.
下面给出algorithm算法以确定移动充电设备总数m=|M|和每个移动充电设备需要覆盖的传感器节点个数k.algorithm算法的具体步骤是:
步骤1.输入网络中n个节点的ID和位置坐标,初始化m=1;
步骤2.初始化k=1;
步骤3.枚举m个移动充电设备,判断其是否位于维护站(基站),若是,执行步骤4,否则,执行步骤5;
步骤4.将网络中所有节点按照路径权重升序排序,选取前k个节点利用弹性网络规划充电路径,并将这些节点标记为已经被规划的节点.若节点为未被规划节点,则其路径权重预估公式为公式(11)相同,否则应加上惩罚系数f;
步骤5.移动充电设备遍历路径上的每个节点,并对其进行无线充电;
步骤6.判断移动充电设备电量是否小于0,若是,则执行步骤7.否则,判断网络是否能持续运行,若是,则输出m值和k值,算法结束;否则,执行步骤7;
步骤7.判断k是否等于传感器节点个数n,若是,则m值加1,执行步骤2;否则,增加k值,执行步骤3;
这里algorithm算法是模拟网络的运行,此时移动充电设备并未开始行走充电.另外,algorithm算法中节点耗电功率根据下式预估:
(14)

在确定了移动充电设备个数m和每个移动充电设备需要充电的节点个数k值后,移动充电设备开始运行,其轨迹和覆盖节点与algorithm算法步骤3至步骤5相似,只是节点的耗电功率取实际的耗电功率.
下面分析algorithm算法的时间复杂度.在algorithm算法中,主要时间复杂度仍旧来自对节点权重值进行排序和每个移动充电设备路径规划的时候运行弹性网络算法.另外,由于网络中只有一个维护站,其覆盖规模决定了移动充电设备的个数相对于节点个数来说是一个比较小的数量级,因此algorithm算法中对m值的遍历实际为常数时间复杂度O(1).而由于本文并未给出对每个节点子集包含节点个数k值的理论推导,因此对k的遍历时间复杂度为O(n).因此,algorithm算法的时间复杂度为O(1)×O(n)×(O(nlogn)+O(n3))=O(n4).
在上述过程中,只剩下一个问题还没有被确定,即如何判断网络是否能持续运行.文献[14]定义满足以下两个条件的网络为可以持续运行的网络:
对于网络中的任意节点,在无线充电设备运行周期开始和周期结束时,都有相同的能量;
对于网络中的任意节点,在无线充电的整个周期内,其能量都不低于最低工作能量.
由于,文献[14]是先将整个网络划分区域,然后给每个区域分配一台无线充电设备进行供电,这样,每台无线充电设备的充电路径一经确定就不再改变.这样做的好处在于计算简便,而其不足之处也显而易见,就是不能适应实时变化的节点能耗.为了具有更好的实时性,本文采用按需降级服务策略,每个周期重新规划移动充电设备无线充电路径.这样,移动充电设备的充电轨迹不固定,其运行时间也就不确定,那么对于每个节点来说,其电量变化就不会呈现严格的周期性.那么,上述判断网络是否可持续运行的两个条件中,条件(2)仍旧适用,但是条件(1)就不适用于本文算法了.为此,我们重新分析节点能耗.对于网络中的节点来说,若网络可以持续运行,则其经过无线充电获取的电量必然大于等于其消耗的能量,且在每一时刻,网络中每个节点的电量不低于最低工作电量,即网络满足:

(15)

(16)

若一个无线传感器网络满足以上两个条件,则这个网络能够持续运行.
3.3 算法流程
多移动充电设备无线充电规划算法的一般过程如图2所示.

图2 多移动充电设备无线充电调度算法流程图Fig.2 Flow chart of wireless charging scheduling algorithm for multi mobile charging devices
首先收集网络中节点的ID和位置信息,然后运行algorithm算法确定需要的移动充电设备数m和对应的k值,接着每个移动充电设备判断自己当前位置是否为维护站,如果不在维护站,则给当前节点充满电,标记当前节点为未被规划节点,并驶向下一个节点.否则就要进行充电路径规划.具体为,首先,按路径权重将网络中所有节点升序排序;其次,选排序后路径权重值最小的前k个节点,运行基于弹性网络的路径规划算法,获得无线充电回路,并将充电路径所要经过的节点标记为已经被规划节点;最后依次访问k个点并给节点充满电.
4 仿真实验及结果分析
4.1 场景和参数设置
实验仿真场景如图3所示.200个传感器节点随机分布在300m×300m的被监测区域内,基站(维护站)位于区域中间.

图3 实验仿真场景Fig.3 Experimental simulation scenario
实验参数设置如下:传感器节点最大电量Emax=0.2J,传感器节点最低工作电量Emin=0.05J,电路能耗Eelec=50nJ/bit,自由空间模型放大倍数εfs=10pJ/bit/m2,多路径衰减模型放大倍数εmp=0.0013pJ/bit/m4,数据融合能耗EDA=5nJ/bit,移动充电设备运行速度V=5m/s,移动充电设备电量B=500kJ,移动充电设备行走耗电功率ηtsp=10w,移动充电设备无线充电能耗功率ηc=10w,无线充电功率U=0.02W,无线充电设备修整时间τvac=300s,传感器节点产生数据速率Ri为1~400bit/s的随机数,惩罚系数f=100000.弹性网络算法参数α=0.2,β=2.0,K=0.2.
4.2 实验结果分析
实验采用MATLAB进行仿真,模拟实现了基于弹性网络的多移动充电设备充电路径规划算法.运行algorithm算法得出,在300m×300m、200个节点的传感器网络中,最少使用5台移动充电设备、k取5的时候,网络可持续运行.
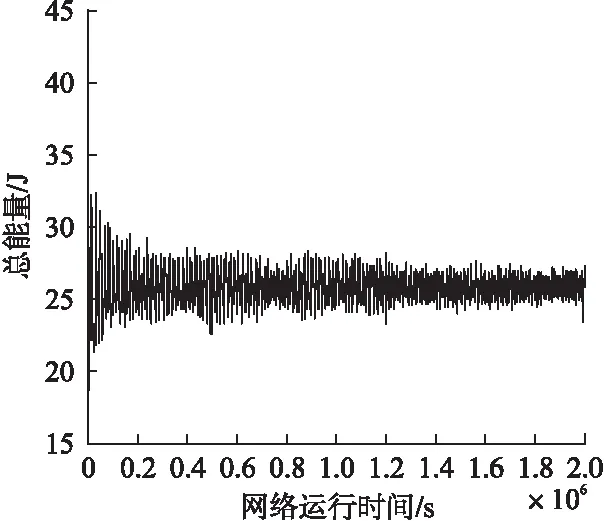
图4 网络总能量随时间变化趋势Fig.4 Change trend of total energy with time in network
为了验证本文提出的算法是否能保证网络持续运行,给出了网络总能量随时间变化的趋势,如图4所示.
图4中,横坐标为网络运行时间,单位为秒;纵坐标为网络总能量,单位为J.网络的总能量最初为40J,刚开始出现较强烈的振动,随着时间的推移,振动幅度逐渐减弱,呈现振动平稳趋势,稳定在26J左右.这说明整个无线传感器网络中,节点无线充电补充的能量和存储转发消耗的能量已经保持动态平衡.也就是说,网络已经持续运作.
然而,网络整体能量保持不变,并不能代表没有个别节点的能量低于工作能量.为此,找出每个单位时间内网络中能量最小的节点,结果如图5所示.
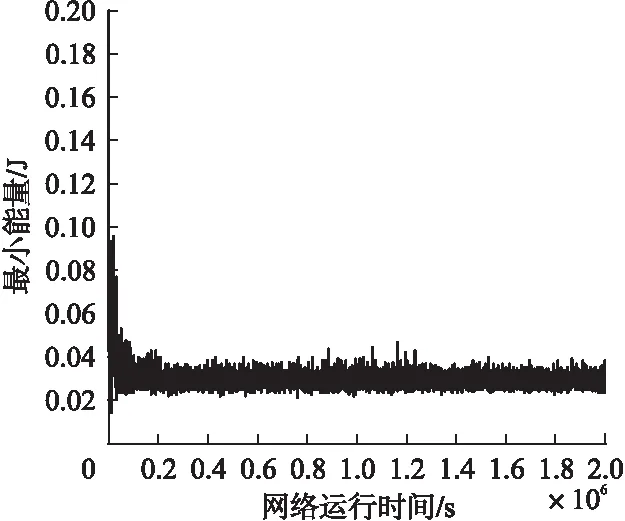
图5 网络中最小能量随时间变化趋势Fig.5 Change of minimum energy with time in network
图5中,横坐标是网络运行时间,单位是秒;纵坐标表示不同时刻网络中最小的能量.由图5可知,最初网络中最小能量是0.2J,为节点的初始能量.随着时间的推移,最小能量先是振荡减小,之后振荡并趋于平稳,保持在0.03J附近.整个过程中,最小能量都位于最低工作能量之上,这说明,整个网路运行过程中,并没有节点由于能量过低而死亡.这是因为,节点通过无线充电补充的能量和其耗电量保持动态平衡.
图4表明整个网络的总能量趋于稳定,图5的实验结果表明网络中所有的节点在任意时刻都有不低于最低工作电量的能量.但是,以上两张图都是呈现振荡状态,还没有特别明显的平稳趋势.为此,我们对实验结果做了平均值处理,以便更直观其稳定趋势.

图6 网络总能量平均值变化趋势Fig.6 Change trend of average total energy average in network
图6为对总能量的平均化处理.在图6中,横坐标为网络运行时间,单位为s;纵坐标为网络中总能量的平均处理后的值,单位为J;曲线表现了网络总能量随时间变化的趋势.所谓平均化处理,即在图6中,曲线上点的值为当前时间开始,向前追溯10000s取得的平均值.这样做的好处是,去除图4中由于曲线振动而带来的曲线走向不确定性.从图6可知,网络总能量迅速稳定在26J左右,并且随着网络运行时间的推移,一直保持平稳.
同样网络中最小能量也做了平均化处理,结果如图7所示.在图7中,横坐标为网络运行时间单位为秒;纵坐标为网络中最小能量的平均化处理值,单位为J;曲线展现了网络中最小能量随网络运行时间的变化趋势.由图7可知,网络最小能量迅速下降后保持稳定.且其稳定值接近0.03J,高于节点最低工作电量.由于图7中曲线并未出现震荡,因此,我们有充分的理由说明,多移动充电设备无线充电路径调度算法能够及时给网络补充电量,使网络中任意节点的能量在任意时刻都不低于最低工作电量.

图7 网络最小能量平均值变化趋势Fig.7 Change trend of average minimum energy average in network
图8给出了网络运行1000s的时,5台移动充电设备的轨迹.图8中,空心方框表示移动充电设备,空心圆点表示传感器节点,节点之间的不同实线或虚线表示不同的运行轨迹.图8可知,多移动充电设备无线充电路径规划算法求得的路径,并没有分区效果.这是因为该算法是综合考虑节点的剩余电量、耗电功率和与基站的距离选择充电节点,并不是简单的分区.另外,一些耗电量过大的节点会在同一循环中受多个移动充电设备充电(比如1000s时第183号节点同时在第一和第三台移动充电设备的规划路径中,第190号节点同时出现在第一和第四台移动充电设备的规划路径中),这一点在分区特别是固定分区的网络中是不能做到的.

图8 移动充电设备路径规划图Fig.8 Planning of mobile charging device path
表1给出了不同时刻,移动充电设备的路径总长度、移动消耗能量、充电消耗能量和移动充电设备剩余能量.在表1中,纵向属性为网络运行时间,单位为秒;横向属性为移动充电设备编号.表格中数据为一四元组,依次为移动充电设备路径总长度、移动充电设备从上一个节点运行到本次节点行走能耗、移动充电设备给上一个节点无线充电能耗和到达本次充电节点时移动充电设备的剩余能量.其中,路径长度单位为米,行走能耗、无线充电能耗和剩余能量单位为焦耳.
表1 移动充电设备能耗表
Table 1 Energy consumption of mobile charging devices

运行时间充电设备1充电设备2充电设备3充电设备4充电设备520s[1218.1,388.58,0,4997857][873.7,251.5,0,49985427][730.0,251.5,0,4998543][830.0,251.5,0,4998543][569.7,251.5,0,4998543]200s[1218.1,267.1,24.4,4991638][873.7,566.6,4.2,4991677][730.0,181.9,0,4991499][830.0,274.6,0,4990500][849.6,251.5,2.9,4998542]400s[702.2,207.6,1.5,4997304][730.0,246.8,5.1,4993871][1002.3,253.9,4.2,4992527][829.9,567.0,3.2,4992073][849.6,289.9,0,4990303]600s[582.6,364.4,4.7,4997183][873.7,556.6,6.0,4991677][830.0,258.9,2.3,4995108][730.0,246.8,3.8,4993871][1218.1,267.1,28.8,4991638]800s[873.7,178.3,6.7,4996213][730.0,488.5,4.1,4995900][830.0,226.6,2.5,4996602][1218.1,558.3,30.9,4994865][640.0,251.5,1.2,4998542]
由表1可知,移动充电设备的行走能耗远大于无线充电能耗,因此,其主要耗电来自行走能量消耗.再看移动充电设备的充电路径长度,均在500米到1300米之间,且移动充电设备的剩余能量足够其从维护站出发,遍历每个节点后重新回到维护站.由此说明本文提出的容量受限的多移动设备充电路径调度算法符合移动充电设备的能量约束.
为了验证本文所提算法能够减少移动充电设备数量,对所需移动充电设备数随着网络节点增多的情况进行了仿真,并与文献[11]提出的Enhanced MinMCP算法做了对比,结果如图9所示.图9的仿真参数为[11]:被监测区域大小为5km×5km,传感器节点最大电量Emax=10.8kJ,传感器节点最低工作电量Emin=0.05Emax=540J,所有节点耗电功率相同为200mW,移动充电设备运行速度V=5m/s,移动充电设备电量B=500kJ,移动充电设备行走耗电功率ηp=100w,移动充电设备无线充电能耗功率ηc=110w,无线充电功率U=5W,无线充电设备休整时间τvac=7200s,惩罚系数f=100000.弹性网络算法参数α=0.2,β=2.0,K=0.2.
在图9中,横坐标为网络中节点个数,纵坐标为维持网络持续运行所需的移动充电设备数.由图9可知,在被检测区域大小不变的 情况下,随着网络中节点的增多,两种算法所需的移动充电设备数量都增大,但是本文算法所需的移动充电设备数量始终少于或等于Enhanced MinMCP算法所需的移动充电设备数.这是因为,在被检测区域大小不变的情况下,随着网络中节点的增多,移动充电设备需要为更多的节点充电,因此需要的移动充电设备数量增多.另外,Enhanced MinMCP算法需要固定分区,并不能够按需灵活调整移动充电设备覆盖的节点,而本文所提算法不分区,完全根据整个网络中节点的需求进行路径规划,能够充分利用移动充电设备,减少移动充电设备数.
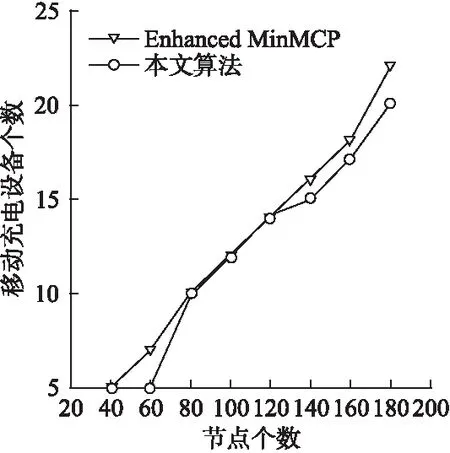
图9 两种算法移动充电设备数比较Fig.9 Comparison of two algorithms for mobile charging devices
5 总 结
本文针对移动充电设备运行轨迹不受限的场景提出了一种多移动充电设备无线充电调度方法.每个移动充电设备从维护站出发,根据事先规划的路径遍历子集中的每个节点,最后回到基站进行修整.考虑移动充电设备能量有限,每个移动充电设备都选择网络中未被规划的路径权重值最小的前k个节点进行充电路径规划.先用集中式算法确定移动充电设备数和每台移动充电设备需要充电的节点数,然后每轮都用弹性网络规划路径.仿真结果证明,提出的方法能够在保证网络持续运行的前提下,减少了所需移动设备数,且对不同节点能耗的非均匀无线传感器网络有较好的适应性.另外,在针对节点能耗不均衡的情况下,可以采用单独设备对高能耗节点进行充电,延长网络寿命.
[1] Jiang X,Polastre J,Culler D.Perpetual environmentally powered sensor networks[C].International Symposium on Information,Processing in Sensor Networks,DBLP,2005:463-468.
[2] Park C,Chou P H.Ambimax.Autonomous energy harvesting platform for multi-supply wireless sensor nodes[C].3rd Annual IEEE Communications Society on Sensor and Ad Hoc Communications and Networks,IEEE,2006,1:168-177.
[3] Kulah H,Najafi K.Energy scavenging from low-frequency vibrations by using frequency up-conversion for wireless sensor applica
tions[J].IEEE Sensors Journal,2008,8(3):261-268.
[4] Fu Ling-kun.Research on energy optimization in wireless rechargeable sensor network-s[D].Hangzhou:Zhejiang University,2015.
[5] He S,Chen J,Jiang F,et al.Energy provisioning in wireless rechargeable sensor networks[J].IEEE Transactions on Mobile Computing,2013,12(10):1931-1942.
[6] Dai H,Wu X,Xu L,et al.Practical scheduling for stochastic event capture in wireless rechargeable sensor networks[C].IEEE Wireless Communications and Networking Conference(WCNC),IEEE,2013:986-991.
[7] Dai H,Xu L,Wu X,et al.Impact of mobility on energy provisioning in wireless rechargeable sensor networks[C].IEEE Wireless Communications and Networking Conference(WCNC),IEEE,2013:962-967.
[8] Zhang S,Wu J,Lu S.Collaborative mobile charging for sensor networks[C].IEEE 9th International Conference on Mobile Adhoc and Sensor Systems (MASS),IEEE,2012:84-92.
[9] Zhang S,Wu J,Lu S.Collaborative mobile charging[J].IEEE Transactions on Computers,2015,3(64):654-667.
[10] Dai H,Wu X,Xu L,et al.Using minimum mobile chargers to keep large-scale wireless rechargeable sensor networks running forever[C].22nd International Conference on Computer Communication and Networks(ICCCN),IEEE,2013:1-7.
[11] Dai H,Wu X,Chen G,et al.Minimizing the number of mobile chargers for large-scale wireless rechargeable sensor networks [J].Computer Communications,2014,46(6):54-65.
[12] Hu C,Wang Y.Minimizing the number of mobile chargers in a large-scale wireless rechargeable sensor network[C].IEEE Wireless Communications and Networking Conference(WCNC),IEEE,2015:1297-1302.
[13] Hang Jiang-hong,Ding Xu,Shi Lei,et al.Research in the time-varying charging and dynamic data routing strategy for rechargeable wireless sensor networks[J].Journal on Communications,2012,33(12):1-10.
[14] Shi Y,Xie L,Hou Y T,et al.On renewable sensor networks with wireless energy transfer[C].Proceedings IEEE International Conference on Computer Communications(INFOCOM),IEEE,2011,2(3):1350-1358.
[15] Durbin R,Willshaw D.An analogue approach to the travelling salesman problem using an elastic net method[J].Nature,1987,326(6114):689-691.
[16] Yi J,Yang G,Zhang Z,et al.An improved elastic net method for traveling salesman problem[J].Neurocomputing,2009,72(4):1329-1335.
[17] Flood M M.The traveling-salesman problem[J].Operations Research,1956,4(1):61-75.
附中文参考文献:
[4] 傅凌焜.可充电传感器网络能量优化研究[D].杭州:浙江大学,2015.
[13] 韩江洪,丁 煦,石 雷,等.无线传感器网络时变充电和动态数据路由算法研究[J].通信学报,2012,33(12):1-10.
猜你喜欢
无线互联科技(2021年4期)2021-04-21
杂文选刊(2021年1期)2021-01-13
河南科技学院学报(自然科学版)(2020年2期)2020-05-22
小型微型计算机系统(2020年5期)2020-05-14
火力与指挥控制(2020年1期)2020-03-27
小猕猴智力画刊(2019年3期)2019-04-19
World Journal of Diabetes(2019年3期)2019-04-16
电子制作(2018年23期)2018-12-26
中华诗词(2017年4期)2017-11-10
小猕猴智力画刊(2017年6期)2017-07-03
