
电子节气门模糊控制策略仿真试验研究
2018-04-11 06:38许凌鲁杨张蓉迟英姿张文庆
汽车实用技术 2018年6期
许凌,鲁杨,张蓉,迟英姿,张文庆
(1.南京工业大学浦江学院,江苏 南京 211134;2.南京农业大学工学院,江苏 南京 210031)
引言
节气门是控制空气进入发动机的一道可控阀门,其性能的好坏对汽车的动力性、燃油经济性以及舒适性有很大的影响[1]。
由于电子节气门系统存在的非线性特性包括非线性弹簧、非线性摩擦、减速齿轮间隙的非线性和进气气流对节气门阀片的非线性作用等,以及一些传感器在控制系统的不断使用过程中存在的可靠性变差和机械磨损等问题。与传统的机械节气门不同,电子节气门系统中会增加很多传感器并且还需要装备控制单元以及驱动电机,其造价要比机械式节气门高出很多。在设计电子节气门系统时因无法考虑到不同的驾驶者的驾驶习惯以及车辆的所有行驶情况,电子节气门系统的设计还不够个性化。因此,要通过控制节气门阀片开度来实现进气量的精确控制,必须要研究电子节气门的控制,以提高发动机工作性能[2]。
本文提出了基于模糊控制的电子节气门控制系统的研究和实现,旨在提高电子控制系统和其他系统的可结合性、操纵性、舒适性和稳定性。
1 电子节气门及其标定
1.1 电子节气门系统
电子节气门系统取消了机械式节气门的刚性连接,采用一种柔性控制方式,电子节气门系统主要由加速踏板位置传感器、电子节气门体总成、电子节气门控制单元等组成(图1)。

图1 电子节气门系统结构简图
(1)加速踏板位置传感器:加速踏板是反映驾驶员意图的装置,它的核心是两个电位计式位置传感器,其内部主要是一个根据位移量变化的可变电阻,电压值变化范围为 0V到5V之间。根据踏板位移量的多少转化成不同的电压信号并传递给电子控制单元(ECU)。不同于传统节气门,节气门开度不再是由油门踏板直接控制。
(2)电子节气门体总成:电子节气门体由阀体、阀片、回拉弹簧、节气门位置传感器、传动轴、传动齿轮、电机等结构组成。
(3)电子节气门控制单元(ECU):ECU 是整个电子节气门控制系统的核心。驾驶员的意图经由 ECU 分析做出判断,给驱动电机发出指令,由电机驱动节气门阀片转动,调节其开度变化。
1.2 电子节气门的标定
采用 90C51RD+型号单片机进行电子节气门开度的位置标定,ET2046芯片主要用来进行A/D转换,采集与输出数据,试验中采用动态数码管模块主要是为了将采集到的节气门传感器数据值显示在动态数码管上方便读数。

图2 电子节气门偏转角度示意图
试验过程与步骤:标定过程利用单片机数码管显示出当时传感器输出的模拟量,通过对输出模拟量的处理将其转换为电压值的大小。因传感器输出模拟量,经过单片机上模数转换成数字量,寄存器是 12位的,计算机里面都是 0和 1两种数字,5V除以2的12次方就是单位代表的电压值,再乘以采集出来的数值就是电压值。角度通过数学转换计算出相应的角度。电子节气门偏转角度示意图如图2所示。
记录出数码管显示模拟值并计算此时节气门位置,根据数学关系转换计算出对应开度夹角,节气门位置传感器输出电压与节气门开度关系表如表1所示。

表1 节气门位置传感器输出电压与节气门开度关系表
电子节气门系统特性参数是建立电子节气门体的仿真模型的基础,对于电子节气门硬件和软件的设计也非常重要。电子节气门系统需要标定的模块包括节气门位置传感器与节气门开度的关系曲线。节气门位置传感器输出特性指节气门位置传感器输出电压随节气门开度的变化关系曲线[3]。拟合节气门位置传感器输出特性曲线如图3所示。其中拟合关系曲线表达式为:


图3 节气门位置传感器输出特性曲线
1.3 加速踏板位移量与传感器电压标定
在本试验中,需要将加速踏板的位移量与加速踏板位置传感器的输出电压值进行标定,利用电子节气门试验平台、数据采集卡、装有LabVIEW的计算机,将数据采集卡与踏板上的位置传感器相连,之后将数据采集卡与计算机相连,在LabVIEW中设计简单算法,读取实时的传感器输出电压值。
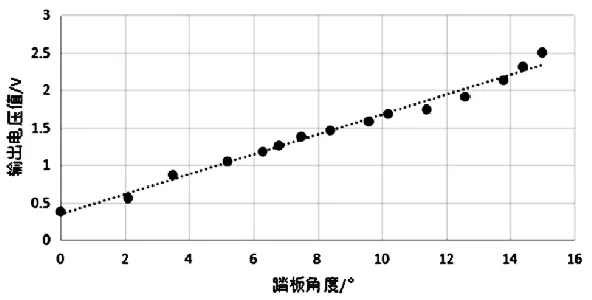
图4 踏板角度与输出电压标定曲线
在试验时,记录踏板不同旋转角度时所对应的输出电压,从而得到输出电压信号与踏板旋转角度之间的关系曲线,关系曲线如图4所示。
2 电子节气门模糊控制器的设计
由于电子节气门的机械系统存在着较强的非线性因素,驱动电机存在着磁滞性,因而在改变其转动方向时有滞后性,使得电子节气门的精确控制较为困难。因此选择模糊算法作为控制策略。模糊控制以规则推理为核心,是建立在抽象水平上的控制,其最大特点是不需要控制对象的精确数学模型,特别适用于像电子节气门和发动机怠速控制等这样的非线性控制[4]。
2.1 电子节气门模糊控制器设计
从电子节气门数学模型可以看出,电子节气门控制系统属于二阶系统,又由于一维模糊控制器具有动态性能不佳和多维模糊控制器控制规则复杂并难以实现。因此,选用二维模糊控制器进行电子节气门控制,其结构如图5所示。
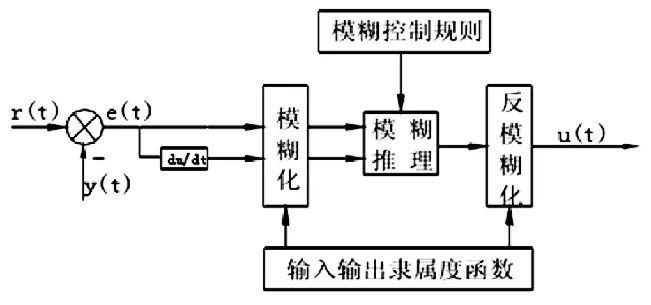
图5 二维控制结构简图
模糊控制器的输入参量节气门位置偏差 e(k)和位置偏差变化率ec(k)在第 k次采样时刻有:

θd为电子节气门系统的期望位置, 通过加速踏板位置传感器信号电压变化反映;θ为节气门实际位置反馈, 通过节气门位置传感器的电压来反映;误差e及误差变化率ec为模糊制器输入变量;输出参量u作为控制节气门直流电机电压的PWM占空比。
2.2 输入、输出模糊化过程
节气门的位置误差e实际变化范围定义为[-0.1,0.1],超过这个范围的都把它当作边界值来处理。误差变化率ec的变化范围为[-0.05,0.05],u的范围定义为[-1,1]。误差语言变量e、误差变化率语言变量ec和控制量语言变量U的论域等级均被定义为{−6,−5,−4,−3,−2,−1,0,1,2,3,4,5,6}。为了进行模糊化处理,须将输入变量乘以相应的量化因子,然后将输入变量从基本论域转换到相应的模糊集的论域。误差的量化因子及误差变化的量化因子分别由下面两个公式来确定,即:


由于模糊推理输出的结果是一个模糊集合,电子节气门系统只能接受一个精确量,而这个精确量只是模糊控制器输出论域中的一个量或是论域中两个元素之间的一个量,将它乘以比例因子,才能施加到电子节气门控制系统上。控制量的比例因子为:

2.3 模糊推理
语言变量值的选取及语言变量论域上的模糊子集:误差语言变量e、误差变化率语言变量ec和控制量语言变量u的值均设定为{负大,负中,负小,零,正小,正中,正大},用英文缩写为{NB,NM,NS,ZE,PS,PM,PB}。语言变量模糊子集{ NM,NS,ZE,PS,PM}采用灵敏度较高的三角形函数,均匀分布,而语言变量{NB}和{PB}分别采用Z函数和S函数。
电子节气门模糊控制器模糊控制规则:当误差大或较大时,选择控制量以尽快消除误差为主;而当误差较小时,选择控制量以系统的稳定性为主要出发点,要防止超调。本文采用Mamdani模糊推理方法。模糊控制规则共有49 条规则,如表2所示[5]。

表2 模糊控制规则表
2.4 清晰化
非模糊化把输出模糊量转化为输出变量的值,它又叫模糊决策。由于对于一个输出变量有多个模糊子集,因而有多个模糊输出变量,这样就需从多个模糊子集及它们的隶属函数中判断出一个控制量。非模糊化的方法与输出模糊子集的隶属函数定义方法有关,可以采用面积重心法,即加权平均法,把推理得到的模糊子集转变为清楚的控制输出信号。
在仿真试验中,在Mamdani 型模糊推理中的模糊逻辑算法的清晰化中选用面积中心法,即使用面积重心法使信号精确输出,得到模糊控制器的输出为:

式中,u(xi)为 xi点处的隶属度函数值。
利用单片机可以把预先算好的控制量u的表格存在 ECU中,查表即可得到相应的控制量。
3 电子节气门模糊控制仿真试验分析
3.1 建立电子节气门数学模型
在电子节气门的控制中,主要受到弹簧非线性、摩擦非线性以及齿轮非线性的影响。需要对这三种非线性因素进行分析。其中弹簧非线性的影响最为重要,摩擦非线性次之,齿轮非线性最小。根据经验公式,可以总结出传动系统的微分方程为[6]:

式中,N—齿轮传动比;Jm—电机转子转动惯量;J—节流阀转动惯量;fm—电机粘性摩擦系数;Kf—库伦摩擦系数;Ks—扭转刚度;Km—电机扭矩系数。
3.2 电子节气门仿真试验相应特性分析
根据分析所得的数学模型,在 MATLAB/Simulink将节气门体和模糊控制器结合起来成为一个闭环的控制系统。电子节气门控制系统的仿真模型如图6所示,图7和图8为采用模糊策略进行控制电子节气门阶跃跟踪信号仿真结果图。

图6 电子节气门控制系统仿真图
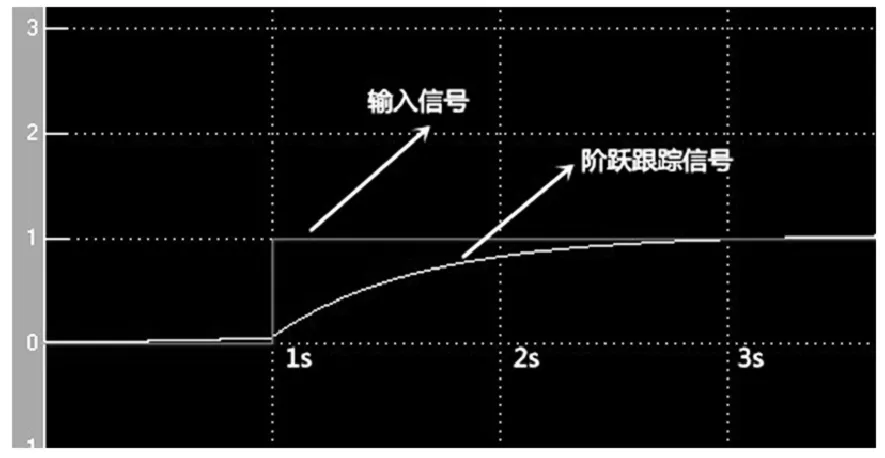
图7 阶跃信号跟踪试验结果图
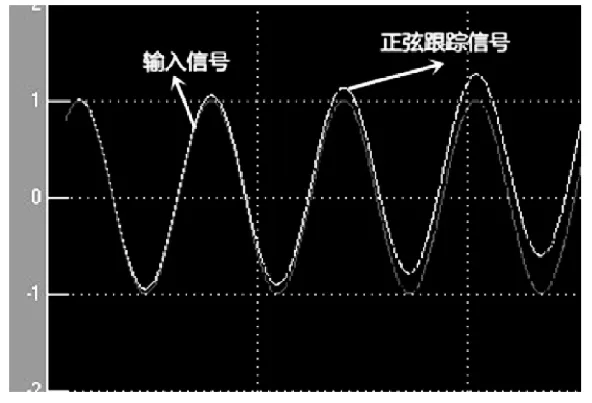
图8 正弦信号跟踪试验结果图
由图7、图8仿真曲线可看出,模糊控制输出曲线超调量明显减小,快速性也明显提高,稳定性增加,调节时间缩短,鲁棒性提高,干扰和参数变化对控制效果的影响被大大减弱,大大改善了系统的动态性能。
通过模糊控制的启发性的知识及语言决策规则设计,有利于模拟节气门人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。
图7为采用模糊控制算法时,节气门对阶跃信号的响应曲线,从图中可以看出,系统不存在超调量,稳态误差较大,且和阶跃量成正比,最大可达 5%。系统响应速度较慢,上升时间可达300ms。由此可见采用模糊控制算法时,系统对阶跃输入不能实现太好的跟踪,需要进一步优化。
图8为采用模糊控制时,节气门对正弦信号的响应曲线,从图中可以看出,系统没有超调量,最大延迟为200ms左右,没有出现严重的延迟和稳态误差,因此系统比较稳定。
4 结论
(1)以阶跃信号作为系统输入,模糊控制的响应曲线几乎不存在超调量,但响应曲线的上升时间比较长,并且存在一定的稳态误差。
(2)以正弦信号作为系统输入,模糊控制的跟踪信号稍微落后于给定的输入信号,存在一定的延迟,但没有出现严重的延迟和稳态误差。
(3)模糊控制输出曲线超调量明显减小,快速性也明显提高,稳定性增加,调节时间缩短,鲁棒性提高,干扰和参数变化对控制效果的影响被大大减弱,大大改善了系统的动态性能。但模糊控制策略在响应时间和控制精度都比较差,可能是选取的模糊子集范围太小、对隶属分布函数选得不够精确造成的,需要在这方面加以改进,尤其是模糊控制规则的制定;或者结合PID与模糊控制两种思想实现对电子节气门更精确的控制。
[1] 罗钦.智能电子节气门控制策略研究[D].重庆交通大学,2016.
[2] 刘奇.汽油发动机电子节气门控制系统研究[D].哈尔滨工业大学,2011
[3] 冯镇,肖寿高,焦磊.电子节气门控制策略仿真研究[J].计算机工程与设计,2012,33(04):1665-1669.
[4] 陈剑.汽油机电子节气门控制系统设计与控制方法研究[D].长安大学,2011.
[5] 侯丽春.某型电子节气门 PID 模糊控制系统仿真分析[J].汽车技术,2015(11):44-46+51.
[6] 文爱民,刁秀永,高强. 搭建试验平台研究电子节气门控制策略[J].中国农机化学报,2015,36(5):180-184.
[7] B.Ashok,S.Denis Ashok,C.Ramesh Kumar.Trends and future perspec-tives of electronic throttle control system in a spark ignition engine[J]. Annual Reviews in Control,2017,44:97-115.
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年3期)2022-02-23
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
汽车维护与修理(2019年3期)2019-08-08
汽车与驾驶维修(维修版)(2019年1期)2019-05-05
汽车与驾驶维修(维修版)(2018年8期)2018-09-21
汽车维护与修理(2018年19期)2018-04-28
读写算·素质教育论坛(2017年16期)2017-08-04
教育界·下旬(2016年4期)2016-11-19
