四轴冲压工业机器人建模与优化设计
2018-04-08 09:59朱鑫祥
重庆理工大学学报(自然科学) 2018年3期
于 华,朱鑫祥
(1.安徽工程大学 机械与汽车工程学院, 安徽 芜湖 241000;2.安徽华东光电技术研究所, 安徽 芜湖 241000)
工业机器人是面向工业生产任务的多关节操作臂或多自由度机械手,是现代制造业中重要的自动化装备[1]。工业机器人的结构复杂,运动形式多变,工作过程中承受载荷较大,在高频率、高速的运行过程中受到扭转、弯曲和惯性冲击等多种工况的作用,其固有频率、结构刚度及本体质量对整体的振动、稳定性、工作精度、噪声、响应速度等具有重要的意义,因此对工业机器人结构的设计与优化显得尤为重要[2]。在机器人结构设计中,采用的优化方法为形状优化[3-5]、尺寸优化[6-8]和拓扑优化[9-10],这些方法较好地完成了机器人结构优化,提高了机器人的性能。
本文以自主设计研发的四轴冲压工业机器人为研究对象,首先运用三维软件进行三维实体建模,对机器人小臂和大臂进行结构设计,然后运用有限元分析软件ANSYS进行有限元分析,根据结果进行机器人手臂的结构优化设计。
1 四轴冲压工业机器人工作原理及建模
本文研发的冲压工业机器人主要面向小型冲床上下料,该冲压工业机器人具有4个自由度。其中,大臂的转动采用伺服电机+减速器传动方式;大臂的上下铅垂运动采用伺服电机+联轴器+滚珠丝杠螺母传动方式;小臂的伸缩运动采用伺服电机+联轴器+滚珠丝杠螺母传动方式;小臂末端手爪水平面内转动采用伺服电机+减速器+同步带传动方式。四轴可联动,使手爪处于运动空间的任何位置。
1.1 伺服电机三维模型
图1是伺服电机三维模型。该伺服电机和联轴器加上滚珠丝杠螺母构成了小臂伸缩运动的传动方式,同时也为小臂末端的手爪运动提供了平面内的动力支持。
1.2 Z轴转盘连接器建模
Z轴的运动对于四轴冲压机器人来说,是非常重要的,图2所示的连接器是经过优化改进的,主要对转盘连接口的内径和螺孔大小进行了调整,目的是为了保证Z轴运动的稳定性。

图1 伺服电机三维模型
1.3 小臂建模
图3所示的是小臂装配体,是整个冲压机器人的动作直接执行构件,主要的运动形式和工作载荷都会在小臂上完全体现。
1.4 手爪建模
图4所示的是手爪模型,安装在图3所示的小臂的末端(最右端),所需要上料至冲床上的物体会直接由手爪来承载其重量。手爪的强度要求较高,目的是为了保证该机器人具有较为广泛的加工适用范围。

图3 小臂装配图
1.5 大臂建模
图5所示为大臂装配完成后的模型,大臂与小臂组合后,构成了机器人的工作机构。
图6中的模型是大臂与小臂组合装配完成后的结构,将其安装在滑轨上,保证了机构的运动稳定性,同时也满足了加工需求。

图5 大臂装配示意图
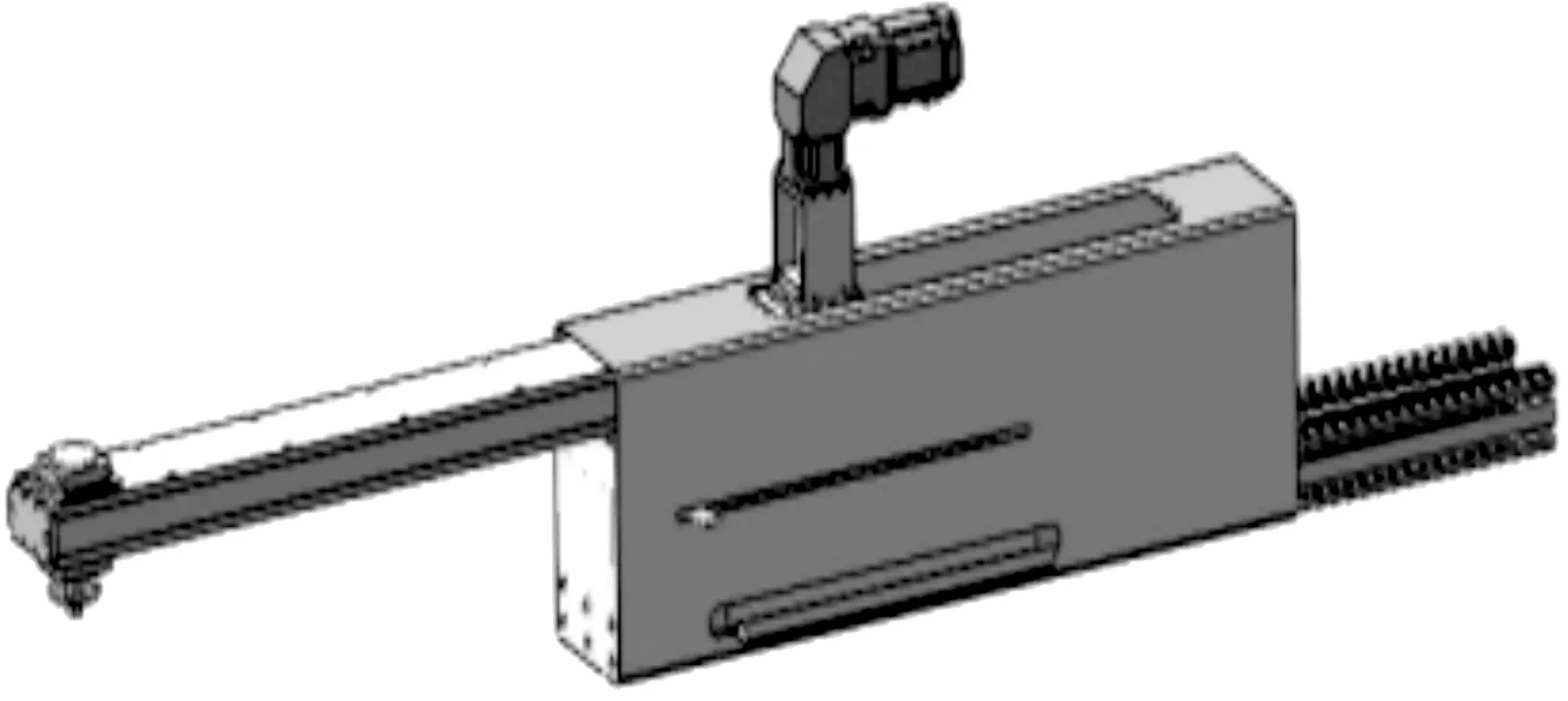
图6 大臂与小臂组合装配示意图
1.6 冲压工业机器人装配模型
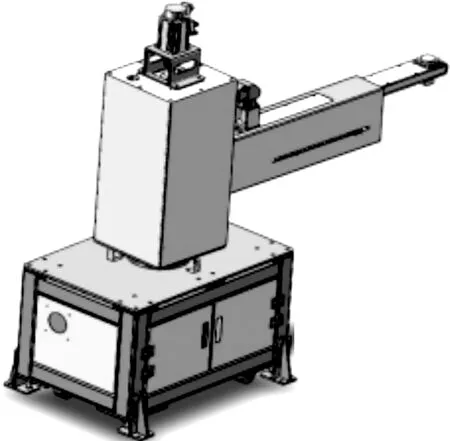
图7 机器人总体装配模型示意图
图7中所示为本文所研究的四轴冲压机器人整体结构示意图,Z轴的转动及大臂在Z方向上的上下运动加上小臂相对于大臂的滑动,可以保证机器人的手爪到达工作空间的任何位置,这就为冲床上下料提供了很大的生产空间,同时通过手爪的转动调整工件位姿,以便于工件在冲床模具中的定位。
2 四轴机器人关键部件有限元分析
2.1 小臂有限元分析
小臂采用伺服电机+联轴器+滚珠丝杠螺母的传动方式进行工作,小臂主运动为水平方向的伸缩运动。小臂末端带有手爪,手爪可以在水平面内进行转动,小臂末端的手爪是采用了伺服电机+减速器+同步带传动的方式进行工作。小臂材料为铝合金,小臂组装在大臂上后,在小臂末端所能够承受的最大工作力约98 N。
图8为进行有限元网格划分后所建立的有限元分析模型。采用ANSYS workbench自动划分网格方式,获得了292 869个单元,共计有476 501个节点,网格平均质量达到了75%,符合进行进一步计算的要求。
图9所示为小臂转轴端装手爪处的总变形云图,从图中可以看到,在承受最大的工作载荷情况下,小臂末端转轴安装手爪处的最大总变形为0.001 640 3 mm,此处的竖直方向变形云图可以在图10中看到。
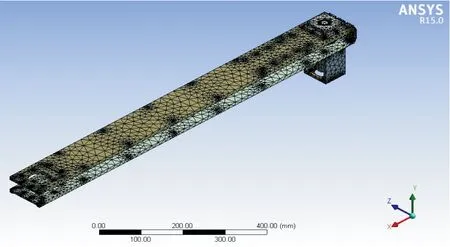
图8 小臂有限元模型
从图10中可以清晰地看到,小臂大部分的结构在竖直方向上的位移都处在最大值的范围中,竖直方向小臂的最大变形量为2.471 4×10-6mm。在小臂与大臂进行组装后,小臂在竖直方向上整体位移较大的情况会有良好的改善。
随着团场小城镇建设步伐的加快,母亲居住了几十年的平房被拆除了,搬迁进了团里安排的廉租房。廉租房在二楼,面积不大,也就60多个平方,很多东西都被母亲扔掉了,但是那台老旧的飞人牌缝纫机,却被母亲搬到楼房上,放在了阳台上光线最充足的地方。
图11和图12分别为小臂应力云图和应变云图。从图11中可以看出,小臂机械手爪安装部位的应力情况,以转轴为中心,两侧及中心部位应力较大,但都没有达到最大值,基本维持在0.9 MPa以下的水平,故在转轴及机械手爪正常安装的情况下,会获得一个更加良好的工况,所以,可以判断小臂的工艺水平符合工作要求。

图10 小臂竖直方向变形云图
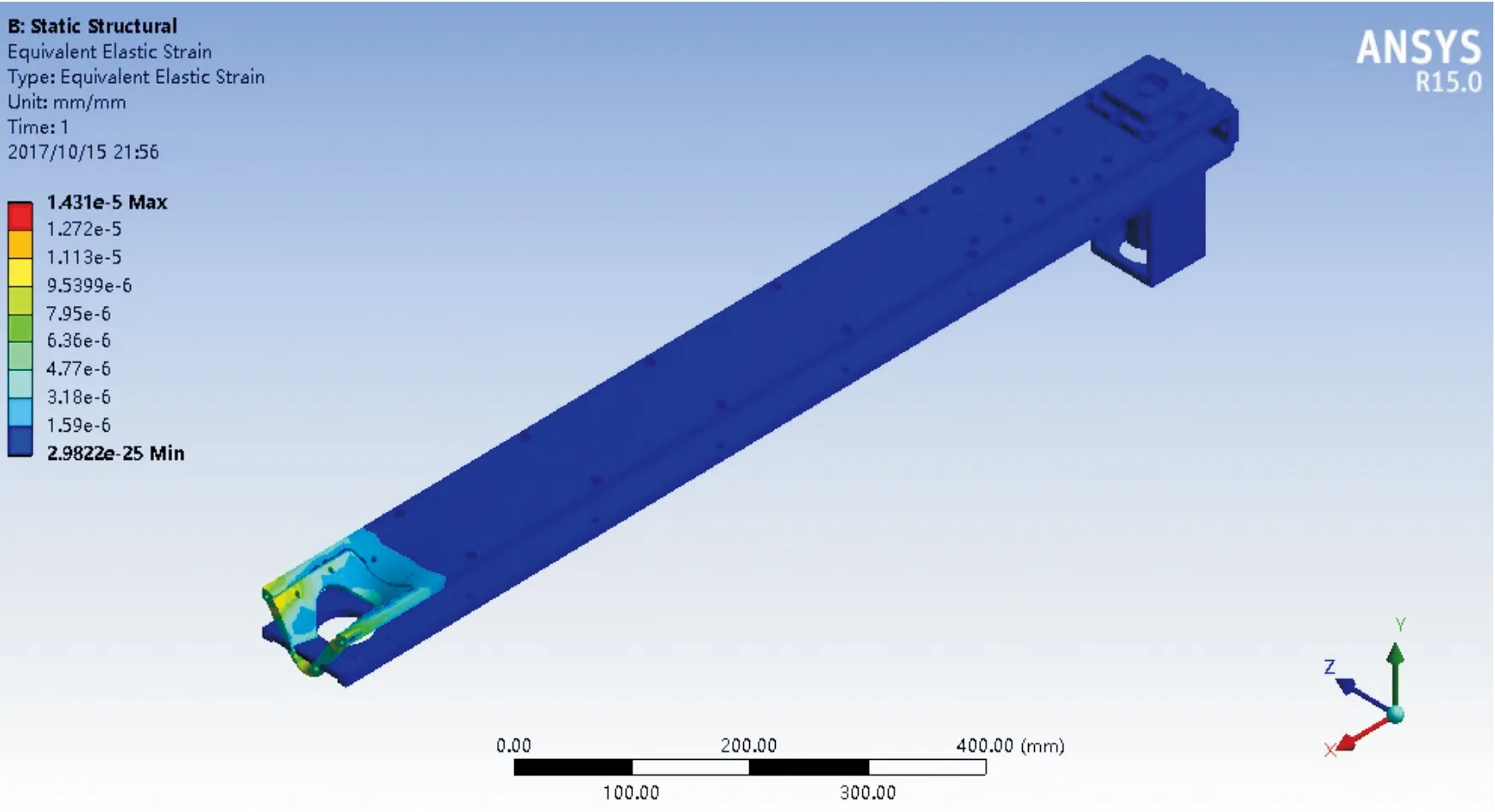
图12 小臂应变云图
通过观察图12中的应变云图可以看出,小臂的末端安装机械手爪处会产生较小的变形量,变形量的值为1.113×10-5mm。整个小臂,除去安装机械手爪的部位,其余位置发生的变形都非常小,由于当前模拟的是最差的工作情况,所以实际工作时,小臂会处于一个正常的工作水平。
综合图11和图12可以看出,整个小臂的工作力主要集中在机械手爪安装处的末端,因此其余应变及应力较小的位置可以在今后的结构优化中进行改进。
在实际工作情况下,小臂大部分时间处于空置转动状态,受力情况肯定要比模拟情况更加良好,所以通过以上分析可以得知,小臂变形量符合生产要求。
2.2 大臂有限元分析
经相关计算可得,驱动大臂的最大扭矩为14.37 N·m,以顺时针方向作用于大臂的2个侧面。
图13所示为简化后的大臂有限元模型,网格尺寸大小为20 mm,采用自动划分网格的方式进行划分,对于大臂的有限元模型,共获得了185 497个网格,共计387 189个节点,网格平均质量均在75%以上,符合实际要求。
图14和图15所示分别为大臂应力和应变云图。从图14中可以看到,大臂最大应力为1.244 MPa,出现于大臂固定在轨道底面与大臂侧面相交处的4个角的位置;从图15中可以看到,大臂除底面与侧面相交处之外,均受力较小,所以可以考虑通过去除材料或者优化尺寸的方式对大臂整体结构进行优化。
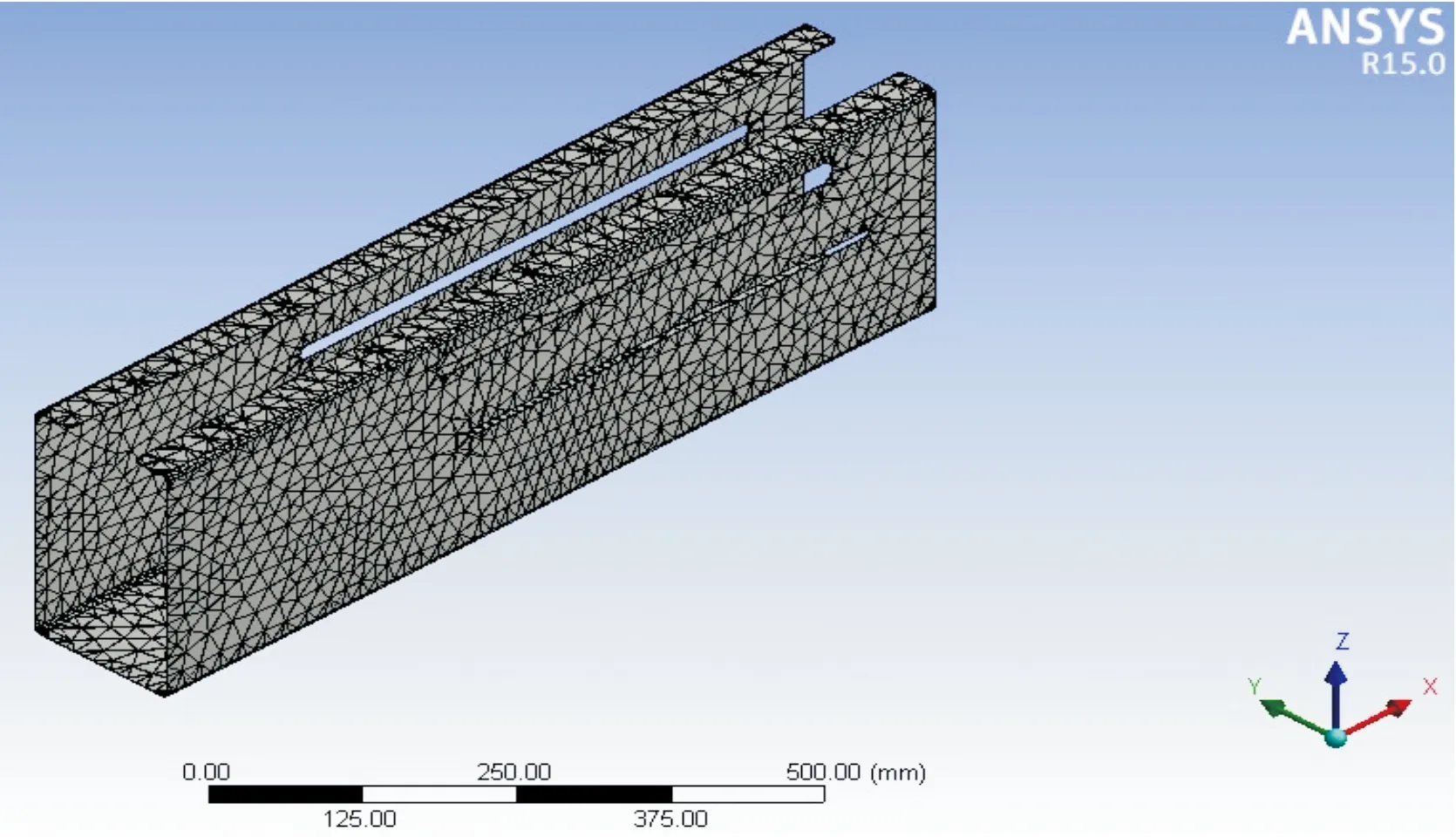
图13 简化后的大臂有限元模型
从图15中可以看出,大臂在仿真所模拟的最为不利的工作条件下的最大变形量为3.362 7×10-5mm。
大臂的总变形云图如图16所示。从图16中可以看出,大臂顶端与小臂连接面处发生的变形最大,这是大臂与小臂装配时所需要注意的位置,同时此处也是大臂可以进行结构优化的地方。
2.3 大臂的拓扑优化分析
通过前面的分析可以得知,大臂在整个工作机构(小臂与大臂的组装体)中具有很大的优化空间,因此采用ANSYS workbench中的shape optimization模块对大臂结构进行进一步优化。
将简化后的大臂模型导入到优化模块中进行计算,设置以优化30%的体积为目标,经过计算,可以得到图17所示的优化结果。其中深红色部分为需要去除材料部分。图18和图19所示分别为移除材料云图和大臂移除材料后的效果图。
图17 大臂拓扑优化结果
从图18中可以很清晰地看到,需要移除的材料主要集中在大臂与小臂接触的一端和大臂与立柱接触的一端。
从图19中可以看出,在进行新的大臂结构设计的过程中,可以将大臂顶部两端进行镂空设计,经过最后的计算可以得到,大臂原始质量为1 567.2 g,优化后的质量为1 488.5 g。通过这种优化设计既可以减轻大臂的质量,又可以控制构件材料的成本。
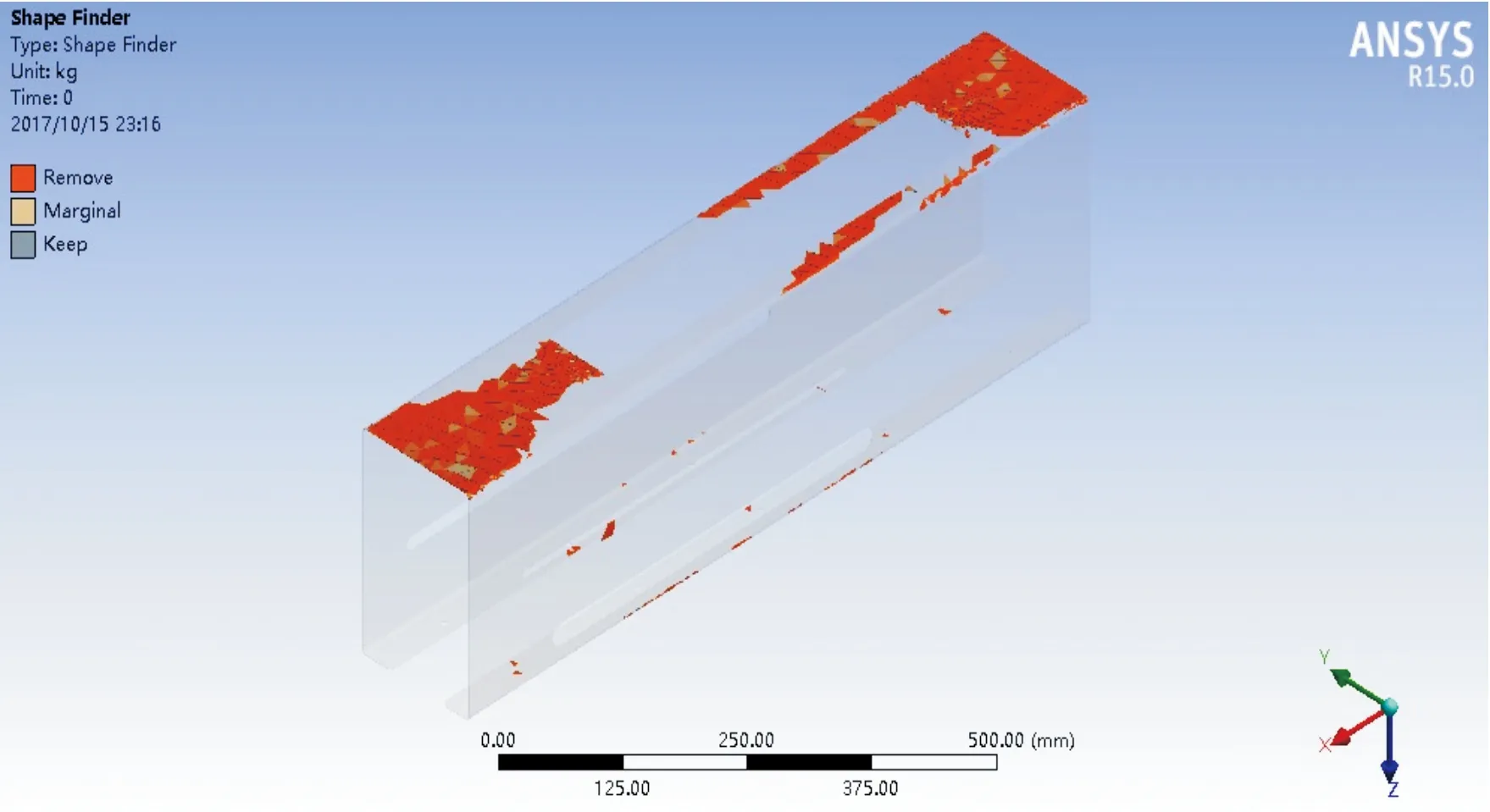
图18 移除材料云图
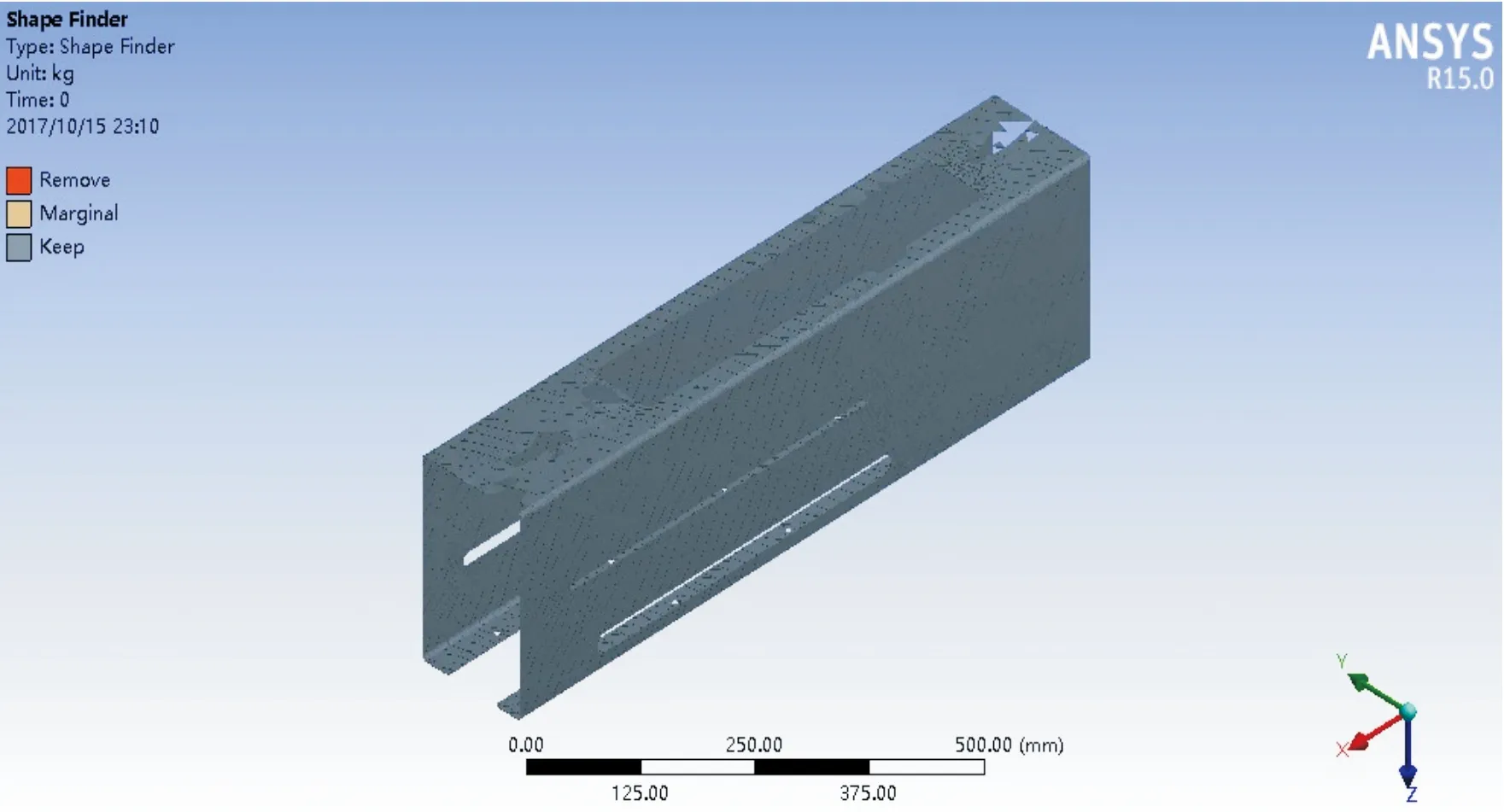
图19 大臂移除材料后的效果图
3 结束语
通过对四轴冲压机器人进行设计和三维建模,并将其模型导入ANSYS内进行有限元分析,确保载荷最大状态时机器人工作的安全性,以验证机器人整体设计的正确性,并对其结构进行进一步优化,同时也为后续控制系统设计打下基础。
参考文献:
[1]管贻生,邓休,李怀珠,等.工业机器人的结构分析与优化[J].华南理工大学学报(自然科学版),2013,41(9):126-131.
[2]许辉煌,褚旭阳.工业机器人多目标拓扑优化设计[J].机床与液压,2017,45(11):32-37.
[3]马孝林.高压带电作业机器人作业机械臂的设计及优化[D].济南:山东建筑大学,2014.
[4]吴焱明,柯尊忠,徐业宜,等.机器人操作器动力学形状优化设计[J].合肥工业大学学报(自然科学版),1996(4):54-59.
[5]李铁刚,冯显英,岳明君,等.码垛机器人抓手的结构设计及有限元分析与优化[J].组合机床与自动化加工技术,2017(3):49-52.
[6]李瑞峰,仝勋伟,葛连正,等.基于弹性动力学仿真的码垛机器人动态优化[J].华中科技大学学报(自然科学版),2015(s1):23-26.
[7]仝勋伟.码垛机器人动态特性分析及其优化[D].哈尔滨:哈尔滨工业大学,2014.
[8]郭盛,于智远,曲海波.轻型抓取机器人的优化设计与路径规划[J].北京交通大学学报,2017,41(1):101-106.
[9]李清伟.焊接机器人大臂有限元分析及拓扑优化[J].组合机床与自动化加工技术,2014(11):63-64,74.
[10] 席堃,丁晓红,汪兵兵,等.某型号搬运机器人倍速平移机构轻量化设计[J].机械工程与自动化,2015(6):38-40.
猜你喜欢
包装与食品机械(2021年5期)2021-11-06
环境技术(2021年4期)2021-09-11
制造技术与机床(2019年12期)2020-01-06
装备制造技术(2019年6期)2019-08-15
组合机床与自动化加工技术(2019年5期)2019-05-24
电子制作(2018年24期)2019-01-03
荣誉杂志(2017年7期)2017-08-23
载人航天(2016年4期)2016-12-01
综合智慧能源(2014年1期)2014-09-10
中国工程机械学报(2014年3期)2014-05-25