
一种无人机影像空三加密点抽稀算法
2018-04-08 01:45王刊生
测绘通报 2018年3期
王刊生,郑 亮
(中交第二公路勘察设计研究院有限公司,湖北 武汉 430056)
无人机遥感具有分辨率高、机动灵活、实时性强等特点,广泛应用于工程勘察领域。由于飞行姿态不稳定、影像旋偏角大、航向及旁向重叠度不规则等因素,无人机影像容易产生复杂的几何变形和灰度差异。影像匹配既是无人机影像空三加密的必要步骤,也是获取测区全景正射影像图的基础性和关键性问题。目前无人机影像匹配主要采用基于计算机视觉的特征点检测算法,如SIFT和SURF算法,这类算法对图像的复杂变形和光照变化具有较强的适应性,但是由于无人机影像分辨率高,匹配的特征点过多,虽然可以调整算法阈值减少特征点个数,但是特征点的稳定性也会同时下降,导致在纹理缺乏的区域,提取不到特征点。大量的匹配特征点一方面会降低区域网平差计算的效率,另一方面也会影响空三加密的精度。
为了提高大规模平差效率,Lourakis使用稀疏存储与矩阵分解技术来求解法方程,Cornou等通过优化减少位置变量个数来降低解算负担,冯其强等提出了对三维点逐点解算的点松弛法快速计算方法。本文针对无人机影像匹配特征点过多、分布不均匀的问题,在区域网平差前对特征点进行预处理,通过全局抽稀和局部抽稀,控制特征点的数量和分布,达到优化区域网平差的目的。全局抽稀是指对于整个影像集进行点位抽稀,而局部抽稀则是对影像集中部分空间位置相邻影像的抽稀,需要人工定义抽稀的目标空间区域。局部抽稀是对全局抽稀的补充,主要是针对某些特殊情况,如全局抽稀后,某两张影像之间彻底失去了点位联系(即无法直接关联,或通过其他影像间接关联)。
1 基本需求
抽稀问题的需求,即解决以下描述的问题:如图1所示,在一个影像集中,每一张影像上分布着大量的观察点位,若干个观察点位可能本质上是同一个观察位置,即同名点(文中称连接点)。现需要减少每一张影像上的观察点位,使最终每一张影像上点位数量急剧减少且均匀分布,数量标准为尽量使划分的网格中仅保留一个点位。删除某一个观察点位时,必须删除其他同名的观察点位。此外还应满足一定的约束条件,如优先保留连接度高的点(连接度指连接点包含观察点的数量)、距离网格中心近的点,以及其他约束条件。
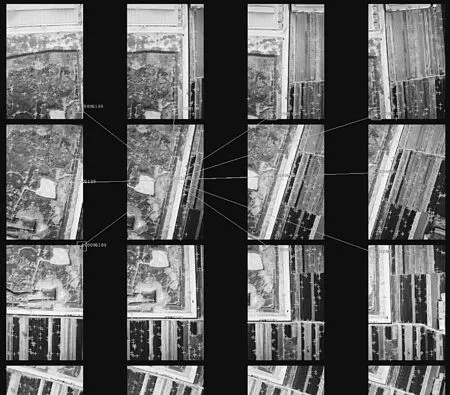
图1 空三加密点示意图
2 模型构建和基本策略
2.1 抽稀的模型构建
抽稀过程的模型,即是算法中操作的基本单元,在代码中表现为类设计。整个抽稀算法过程涉及的相关类有5个:①影像类:包含影像的名称、编号,观察点列表及相关的标记信息(如是否在圈定区域内,是否参与抽稀等);②观察点类:包含从属影像的编号、从属连接点编号、自编号、坐标信息;③连接点类:自编号、连接度、网格索引号列表、平均去心距离、观察点列表,以及相关标记;④关联度类:被关联的两张图像的指针、关联度及相关标记;⑤抽稀器类:与抽稀相关的设置参数(如影像宽高信息、数量信息、抽稀强度参数、网格划分参数等)、中间统计信息、连接点容器,以及兼容的原始数据的各种接口和抽稀过程中的各种步骤方法函数等。这5个模型的协作关系如图2所示。
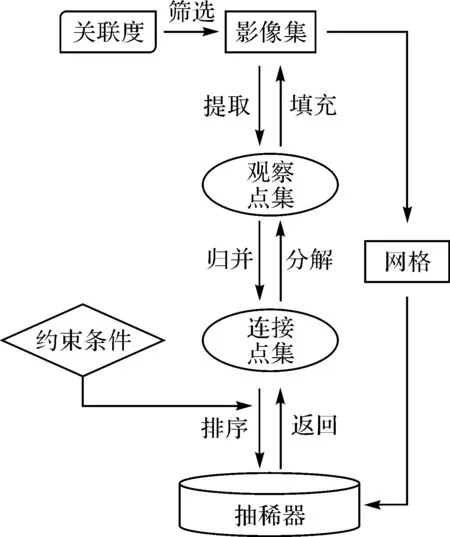
图2 抽稀模型间的关系
2.2 基本策略
抽稀的基本策略是选点,即获取原始点位数据,将影像划分为网格单元之后,将观察点位归并为连接点并根据约束条件进行排序。清空所有的原始点位,然后从已排序的连接点列表中,对第一名的连接点开始考察选入,并填充单元网格,直到单元网格满足每格一点的要求时,即完成抽稀过程。
3 全局抽稀算法
3.1 读入数据构建模型
原始的数据格式可能有两种情况:以连接点为单位,每一条数据记录了一个连接点及其包含的观察点的信息,影像编号作为观察点的属性;以图像为单位,每一条数据记录了图像及其包含的观察点的信息,连接点编号作为观察点的属性。
根据算法的需要,以连接点为单位的格式是更为合适的,因此,在处理以图像为单位的数据之前,还需要作一步额外的转换,转换为以连接点为单位的模型。
构建模型主要是构建连接点的数组,计算连接点的相关信息(连接度、平均去心距离、观察点指针集等属性),以及计算各单元网格的属性等。
3.2 网格划分
所有的影像均采取统一的划分方式。划分方式决定抽稀强度,即抽稀后点密度是最关键的因素,最小可以按3×3划分,也可以按其他行列数划分,但行数或列数不应超过10,否则将导致后续解算过程中内存不够或耗时过长。
3.3 获取原始空格编号
获取原始空格编号是构建算法过程结束的标志的必要一步。本算法中以所有网格均有点为结束标志,如果划分的单元格中原本就没有观察点,那结束条件将永远不能满足,程序将陷入死循环,而实际上空间上排布在最外围的影像的靠外围的区域一般是缺少点或没有点的,因为没有与其他影像形成公共区域。获取原始空格编号,即是让原始空格不参与程序的运算。
3.4 连接点排序
将第一步中得到的连接点数组,按照一定的排序规则进行排序,为后续的选点抽稀作准备。排序的规则是根据实际需求决定的,规则的灵活性决定了抽稀的灵活性。排序规则可以定性也可以定量,如目前抽稀算法使用的规则是定性规则,规则指标有两个:①连接点的连接度(连接点包含观察点的个数);②连接点的去心距离(观察点距离各自单元格中心的距离的均值)。连接度作为第一指标,去心距离作为第二指标,即判断两个连接点的顺序,当第一指标不同时,只考虑第一指标,相同则考虑第二指标,依次类推。如果使用定量规则,则应当对每一个指标赋予权值,通过加权的方式计算综合评分,然后根据评分进行排序。
3.5 选点抽稀
如图3所示,在得到排序后的连接点列表之后,清空原图像中的所有点位,并从列表中第一个点开始判断选入。选入一个连接点即选择了该点包含的所有观察点,因此观察点对应的单元格所包含的观察点个数开始增加,当选择了一定量的连接点后,除原先无点的单元格以外的所有单元格都应有观察点,此时抽稀结束。值得一提的是,选点过程并非是完全根据连接点的排名顺序,因为有些点的排名很靠前,但是其观察点所在的单元格已经有点存在,则这样的连接点对于填充单元格没有意义,因此不选择,同理对于填充单元格意义较小的点也暂不选择。对于填充单元格可以设定一个阈值,这个阈值代表了连接点的连接度重视程度,阈值越大,则更优先保留连接度大的点,但此时保留的总点数也会相应增加。目前算法中初始阈值设定为0.5,即当连接点能够贡献的“新格”数量大于等于其观察点数量的一半时被选择,如果按照初始阈值,对点列表选择一遍之后,如果仍不能填满单元格,则将阈值降为一半,降低要求再次从头选择,第二遍仅对没有被选入的点进行考察,即保留已经选入的连接点。依次类推,直到所有单元格填充完毕。

图3 选点抽稀算法流程
3.6 模型转数据
模型转数据是第一步的逆操作,即将算法的模型结果转换保存为读入时的数据形式,交还给用户。
4 局部抽稀算法
局部抽稀算法是全局抽稀算法的一个拓展,区别在于支持用户自定义抽稀区域。算法步骤与全局抽稀基本相同,但是在第一步读入数据构建模型之后,多出一个环节,即计算影像与影像之间的关联度,关联度用两张影像之间公共的连接点数量来表示。关联度的计算与显示,主要是为用户服务,是用户圈定抽稀区域的主要依据,一般来说,用户希望抽稀应该在关联度过大的、空间相关的一批影像之间进行。当用户根据影像的空间位置关系及影像的关联程度圈定出抽稀区域之后,位于区域之内影像将被逐一判断是否与外界影像有联系,如果没有则参与抽稀,反之则不参与抽稀,其目的在于防止抽稀的删点断开了内外影像间的联系。
局部抽稀工具如图4所示,图中划区仅示意,不代表任何实际需求,折线所包围块点表示实际参与抽稀的影像。
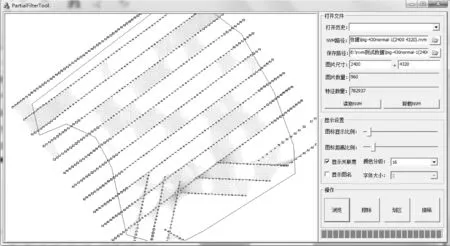
图4 局部抽稀工具
5 试验结果
由于局部抽稀实质上是划定范围的全局抽稀,因此本次试验仅以全局抽稀为例,验证算法的抽稀速度和抽稀后保留点的数量,并将抽稀前后的结果进行平差对比,验证效率的提升和精度的不变性。
表1为湖北黄梅某测区无人机影像数据,不同网格划分方案,原始数据中影像数量为568张,连接点数量为217 663个,观察点总数量为1 028 363个。前3组划分方式(3×3,4×4,5×5)为试验划分方案,最后一组为多次试验之后实际工作中的采用方案。抽稀结果见表1。

表1 抽稀基本结果
被保留的连接点的连接度分布见表2。
由试验结果可以看出,该抽稀算法具有良好的抽稀效率,灵活性强,能够适应不同抽稀程度要求及不同约束条件,抽稀结果稳定,对于平差效率提升很大,且基本不影响平差精度。试验中抽稀后平差精度稍优于抽稀前并不能说明抽稀能稳定提升精度,稍优是抽稀过程偶然去除了较多错点导致的。
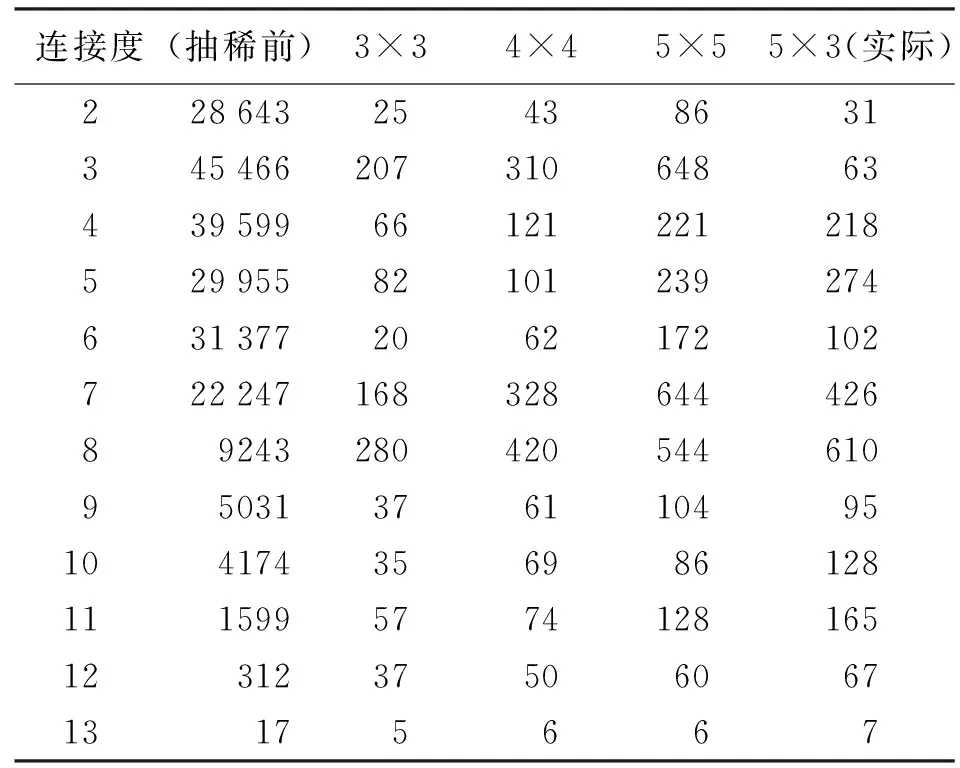
表2 连接度分布
参考文献:
[1] 郑亮,董卫艳,原保成.无人机遥感在海外高速公路勘测中的应用[J].测绘通报,2017(7):81-84.
[2] 李德仁,李明.无人机遥感系统的研究进展与应用前景[J].武汉大学学报(信息科学版),2014,39(5):505-513.
[3] 刘玉轩,蓝朝桢,李参海,等.无人机影像匹配中尺度不变特征应用改进[J].测绘科学,2016,41(7):37-40.
[4] 胡同喜,牛雪峰,谭洋,等.基于SURF算法的无人机遥感影像拼接技术[J].测绘通报,2015(1):55-58.
[5] 梁焕青,谢意,付四洲,等.颜色不变量与 AKAZE特征相结合的无人机影像匹配算法[J].测绘学报,2017,46(7):900-909.
[6] LOWE D G.Object Recognition from Local Scale-invariant Features[C]∥Proceedings of the Seventh IEEE International Conference on Computer Vision.Kerkyra:IEEE,1999:1150-1157.
[7] LI Qiaoliang,WANG Guoyou,LIU Jianguo,et al.Robust Scale-invariant Feature Matching for Remote Sensing Image Registration[J].IEEE Geoscience and Remote Sensing Letters,2009,6(2):287-291.
[8] LOURAKIS M,ARGYROS A.The Design and Implementation of a Generic Sparse Bundle Adjustment Software Package Based on the Levenberg Marquardt Algorithm[R].[S.l.]:ICS,2004.
[9] CORNOU S,DHOME M,SAYD P,et al.Bundle Adjustment:A FastMethod with Weak Initialisation[J].BMVC,2002:223-232.DOI:10.5244/C.16.20.
[10]冯其强,李广云,李宗春.基于点松弛法的自检校光束法平差快速计算[J].测绘科学技术学报,2008,25(4):300-302.
[11]李鑫,孙伟,李林.基于改进SIFT算法的无人机影像匹配[J].测绘科学与工程,2017,37(3):39-43.
欢迎订阅《测绘通报》
《测绘通报》创刊于1955年,是由国家测绘地理信息局主管、中国地图出版社(测绘出版社)主办的反映我国测绘地理信息科技发展现状和指导全国测绘地理信息生产业务的综合性、技术性刊物。现为《中文核心期刊要目总览》收录期刊、中国科技核心期刊(中国科技论文统计源期刊)、中国科学引文数据库(CSCD)来源期刊、中国学术期刊网络出版总库(CAJD)全文收录期刊、中国学术期刊综合评价数据库(CAJCED)核心统计源期刊、《中国学术期刊文摘》收录期刊。曾被评为第二、三届国家期刊奖百种重点期刊,多次荣获全国优秀测绘地理信息期刊奖。
《测绘通报》的主要内容包括大地测量、全球导航卫星系统(GNSS)、摄影测量、遥感(RS)、地图制图、地理信息系统(GIS)、工程测量、矿山测量、地籍测绘、海洋测绘、测绘仪器、信息传输、图形图像处理等方面的新成果和新技术;行业管理、科研、教学、生产的先进经验;计算机、通信等相关理论技术在测绘地理信息领域里的应用及测绘地理信息科技在国家经济建设各个方面的应用;国内外测绘地理信息学术动态及有关测绘地理信息科技信息等。
《测绘通报》的主要栏目有学术研究、技术交流、测绘地理信息论坛、经验介绍、测量员之窗、国外测绘地理信息、行业管理、行业研究、行业调查、知识窗、新书介绍、企业之窗、测绘地理信息教学等。
《测绘通报》为月刊,2018年定价:35.00元,邮发代号:2-223。
编辑部地址:北京市西城区三里河路50号,邮编:100045,订阅电话:010-68531192(金老师),68531317(传真)。
网址:http:∥tb.sinomaps.com
猜你喜欢
河北农业(2021年12期)2021-11-30
电脑爱好者(2021年12期)2021-06-22
电脑爱好者(2021年8期)2021-04-21
河南城建学院学报(2020年3期)2020-08-14
数学大王·趣味逻辑(2020年6期)2020-06-22
数学大王·趣味逻辑(2020年5期)2020-06-19
新课程·小学(2017年8期)2017-09-20
IT经理世界(2017年4期)2017-03-25
汽车文摘(2016年6期)2016-12-07
人民周刊(2016年8期)2016-04-29
