
顾及多尺度分割参数的FNEA面向对象分类
2018-04-08 01:45鲁铁定
测绘通报 2018年3期
孙 坤,鲁铁定
(1. 东华理工大学测绘工程学院,江西 南昌 330013; 2. 流域生态与地理环境监测国家测绘地理信息局重点实验室,江西 南昌 330013)
随着遥感技术不断进步,目前商用高分辨率遥感影像能够提供越来越丰富的几何、光谱、时相、纹理等特征,如何利用遥感影像的特征对影像进行解译是研究的重点。传统影像分类最基本、最概括的两种方法监督分类和非监督分类具备各自特点[1],但基于像元分类精度较难达到生产应用的需求,而面向对象遥感影像分析(geo-object-based image analysis,GeOBIA)能较好地解决此类问题,因此该方法被誉为遥感(RS)和地理信息系统(GIS)之间的桥梁[2]。
面向对象图像处理的必要先决条件是成功的图像分割,随着多尺度特征在影像分析中的凸显,多尺度概念于21世纪初在影像分割处理中得到了较好的应用,如分水岭算法(Watersheds)[3]、均值漂移算法(Mean shift)[4-5]、自适应四叉树分割算法[6]、对象级的保边缘影像平滑算法[7]、基于图的分割算法[8]、分形网络演化方法(FNEA)[9]。此外,黄昕从纹理、形状和对象的角度来提取和分析影像的特征,研究了这些空间信息的多尺度特性[10];王文杰等利用分割后图像对象的光谱特征、纹理特征、形状特征分别进行了变化检测[11]。为了高效地进行分水岭变换,卢官明提出了一种计算图像形态梯度的多尺度算法[12]。丁月平采用“对象完整面积个数最多法”的分割方法,研究得出不同地物的分割尺度[13]。贾春阳根据不同影像对象的空间和光谱特征,自适应地计算空间判据权值和紧凑度判据权值,改进了FNEA方法,并将不同光谱分量对光谱判据的贡献引入到影像对象之间异质性的计算中[14]。
实际上,无论是何种方法,其实质都是通过改进多尺度分割算法去实现遥感影像有效分割处理,然而由于处理尺度方法的复杂性及其概念本身的复杂性,尺度参数如何选取一直是困扰遥感影像处理的难题。本文基于FNEA多尺度分割算法,在简单介绍其特征的基础上,通过实例设置12组不同的分割参数对QuickBird多光谱影像进行分割处理,得出不同多尺度分割参数在时效方面的比较,利用CART分类器对其进行面向对象分类处理,总结尺度参数对影像分类效果、分类精度的影响,为后续研究提供参考依据。
1 FNEA算法
1.1 FNEA算法介绍
分形网络演化方法(fractal net evolution approach,FNEA)是Baatz M和Schape A在2000年提出的一种面向对象高分辨率遥感影像多尺度图像分割算法[9],以分割对象的平均异质度最小化作为分割根本原则,在分割前确定异质度的分割参数(光谱因子和形状因子),通过调节影像分割的尺度参数,并通过从下而上(bottom-up)对象信息来进行合并,最后获取对象层次结构结果。综合考虑对象的光谱特征和空间特征结合使用,这样才能使整幅影像所有分割对象优于其他的多尺度分割算法,避免了传统分割算法分割对象边界比较破碎的问题。
FNEA是目前使用较多的面向对象影像分析技术的一种多尺度分割算法。该方法的依据为对象单元的异质度在合并前后变化最小,在eCognition中的异质度主要被认为是对象的颜色和形状,异质度f的增加必须小于某一阈值[15]。表达式如下
(1)
式中,Δhcolor为光谱异质度增量,wcolor为权重;Δhshape为形状异质度增量,wshape为权重。Δhshape由紧致度增量Δhcompt和光滑度增量Δhsmooth两部分组成,权重分别为wcompt和wsmooth,计算公式为
(2)
式(2)中Δhcompt、Δhsmooth计算公式为
(3)
(4)
式中,nobj_1、nobj_2、σc,obj_1、σc,obj_2、lobj_1、lobj_2、bobj_1、bobj_2分别为要合并前两个对象的像素个数、方差、周长及最小外接矩形边界周长;nmerge、σc,merge、lmerge、bmerge分别为合并后对象的像素个数、方差、周长和最小外接矩形边界周长。因此,平滑度异质度等于事实上的边界长度lmerge和由平行于光栅的图像对象的边界框给出的边界长度bmerge的比值。
紧凑度异质度等于实际边界长度与构成该图像对象像素数的平方根比值。权重wc、wcolor、wshape、wsmooth、wcompt是可以选择的参数,以便为某些图像数据堆栈和考虑的应用程序获得合适的分割结果。
1.2 FNEA算法流程
多尺度分割是一种自下而上(bottom-up)的方法,通过合并相邻的像素或影像中小对象,在确保对象与对象之间平均异质度最小、对象内部像元之间同质度最大的前提下,基于区域合并技术实现影像分割。FNEA是通过迭代的方式进行对象的合并,在每一次的迭代过程中,若该对象与其邻域对象最小异质度增量小于阈值,则将它与该邻域对象合并为新的对象,否则不进行合并操作。终止迭代的条件是在这次迭代过程中所有对象都没有与其邻域对象进行合并,即该次迭代过程中异质度的增加量超出了阈值[16]。具体分割流程如图1所示。
2 试验结果与分析
本文通过eCognition Developer 8.7分析软件对影像进行分割分类处理,试验环境为:Intel(R)Pentium(R)CPU P6200 @ 2.13 GHz,RAM为2.00 GB。
2.1 研究区数据
研究数据为经过裁剪的美国地区QuickBird 300×300多光谱影像(分辨率为2.4 m)。影像已经过几何纠正、大气校正等处理,参与分类的波段为红(R)、绿(G)、蓝(B)和近红外(NIR)。该区域典型的地物有水体、建筑、道路、草地、林地及建筑用地六大类,如图2所示。

图2 QuickBird多光谱影像
2.2 不同分割方法对QuickBird影像分割效果对比试验
试验采用棋盘分割、四叉树分割、多尺度分割、多尺度分割+光谱差异4种分割方法得到分割效果图,如图3所示。
棋盘分割算法产生简单的正方形对象;四叉树分割[6]与棋盘分割类似,在裁剪出一个初始的正方形网格后,继续进行四叉树分割,并将不符合同质性标准的正方形裁剪成4个较小的正方形;多尺度影像分割[7]从任一个像元开始,采用自下而上(bottom-up)的区域合并方法形成对象;光谱差异分割基于上面3种分割算法所得到的分割结果,通过分析相邻分割对象的亮度差异是否满足给定的阈值,来决定是否将对象进行合并。
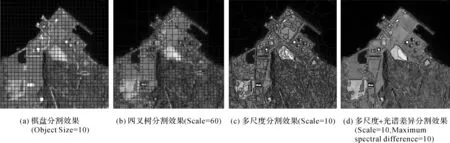
图3 不同分割方法对QuickBird影像分割效果对比试验
由于影像分割后的效果直接关系分类效果及精度,通过目视解译方式对4种不同的分割方法得到分割效果图进行对比可知,多尺度分割算法能最大限度地保留分割后影像的真实性,分割边界较好地反映了各地物之间的差异,因此本文最终选取多尺度分割为本文的分割方法。
2.3 基于FNEA面向对象高分辨率遥感影像提取方法
本文通过ArcGIS软件结合目视解译的辅助办法对QuickBird多光谱影像进行点矢量选取,选取水体、建筑、道路、草地、林地、建筑用地六大类地物,导入eCognition Developer8.7面向对象分析软件中,从5开始,以5为单位向上递增,共选取12组参数进行分割试验,统计分割时间。利用CART分类器对多尺度分割参数Scale设置为5、10、15、20、25、30、35、40、45、50、55、60的12组不同分割尺度参数下分割影像进行分类,采取与训练样本相同的方式随机选取190个矢量地物点对面向对象CART分类器方法的地物分类结果进行精度评价。具体流程如图4所示。
2.4 面向对象分割分类处理
对影像进行分割试验,每组分割参数进行3次分割试验,选取试验平均值。从5开始,以5为单位向上递增,共选取12组参数进行分割试验。通过分割时间数据对比可知,随着分割参数的增大,影像分割时间递减,并在后期趋于稳定。分割参数与影像分割时间统计见表1。
图5显示了不同分割参数下CART分类器分类效果。表2显示了12组不同分割尺度参数下CART分类器分类总体精度及Kappa系数情况。
随着分割尺度的增大,错分类现象随之出现,不同地物之间的关系也模糊不清,因此在进行多尺度分割参数选择时,应选择小尺度分割参数,这样能最大可能地保留地物的准确性,并在后期的精度验证中具有优势。
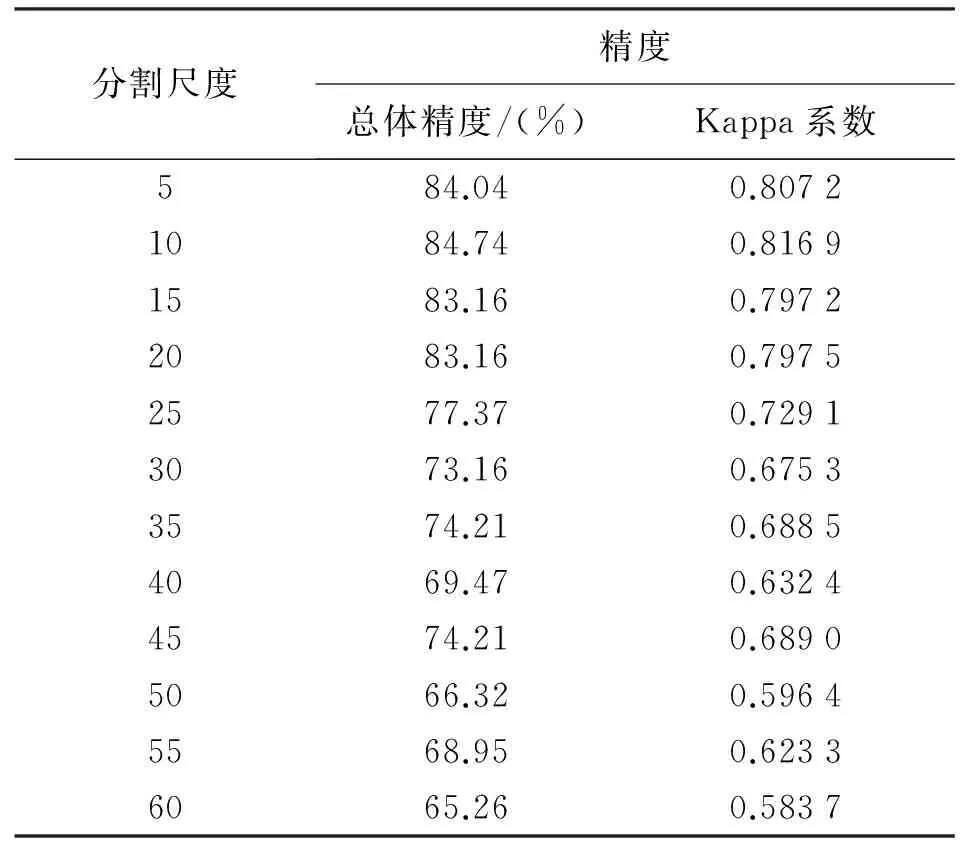
表2 12组分割尺度参数对应的总体精度和Kappa系数
图6显示了CART树分类器在不同分割参数下所得到的总体精度及Kappa系数变化趋势,由图中可以看出,随着分割尺度参数的增加,精度呈下滑趋势。因此,小尺度分割参数比大尺度分割参数在地物精度验证结果中具有相对较好的优势,且当分割参数Scale=10时,分类精度达到最好的级别。综合考虑分类时效与分类精度情况,小尺度分割参数能占据主要优势。
表3给出了CART分类器面向对象最高分类精度(分割尺度Scale=10)对应的混淆矩阵。由于道路与建筑用地之间光谱特征本身就比较相似,导致一定程度上的分类错误,在后续工作中将对此部分内容作具体研究。通过其分类后影像(如图7(a)所示)、总体精度及Kappa系数可知,当选取较小的分割参数时,分类效果的破碎性在一定程度上得到了改善,地物图斑的完整性相对较好,而且分类精度也高。
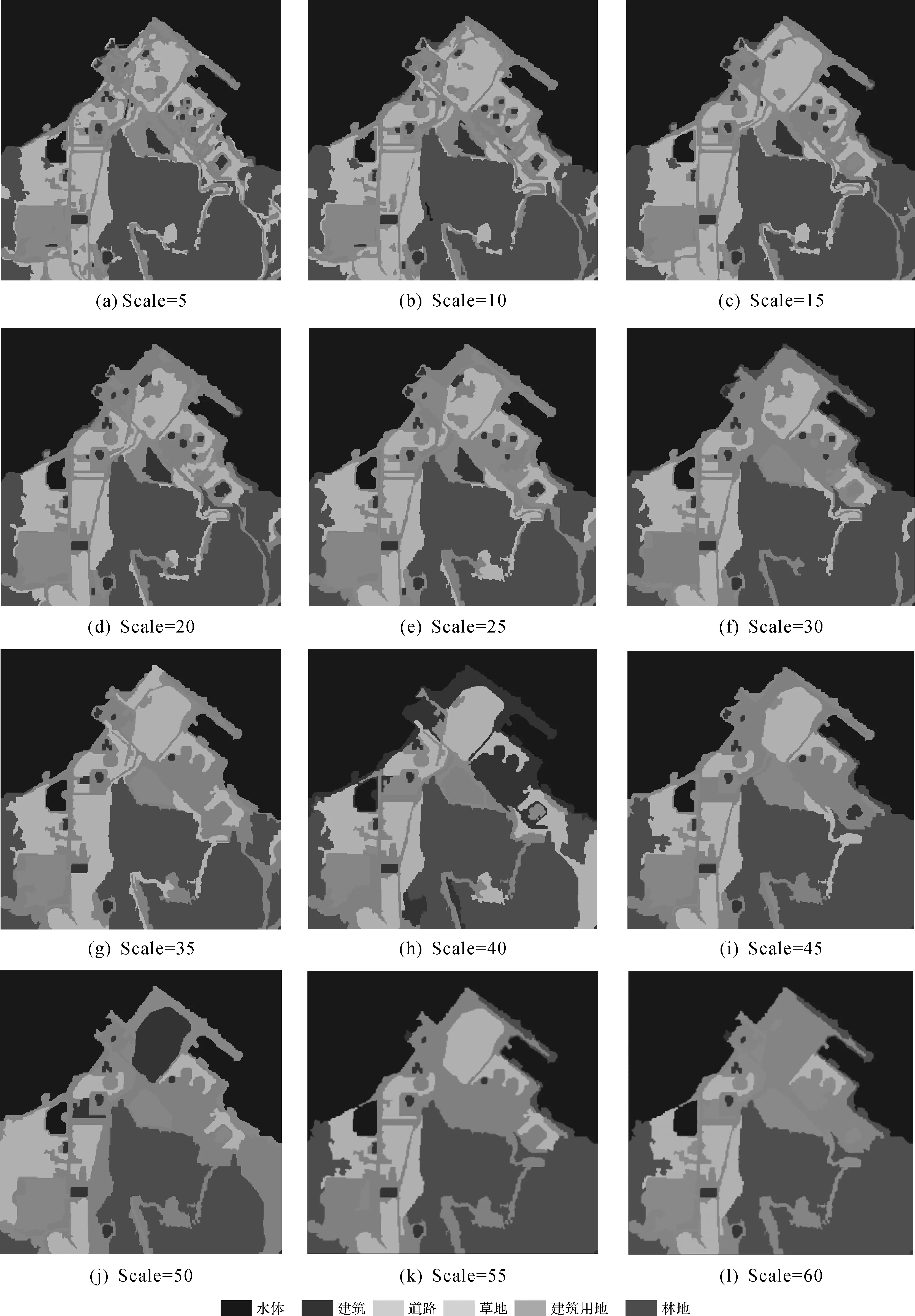
图5 不同分割参数CART分类器分类效果
3 结 语
本文通过试验对比研究4种遥感影像分割方法,选择分割效果较好的多尺度分割方法对QuickBird多光谱影像进行分割预处理,随着分割参数的增大,影像分割时间递减,并在后期趋于稳定。对比CART分类器分类效果图可知,小尺度分割参数对分类效果能有较好的提升;由混淆矩阵可知,小尺度分割参数分类精度优于大尺度分割参数分类精度,且当分割参数Scale=10时,分类精度达到最好的级别。综合考虑分割时效及分类精度,在进行面向对象分类处理过程中,小尺度分割参数比大尺度分割参数在面向对象分类处理中具有相对较好的优势。
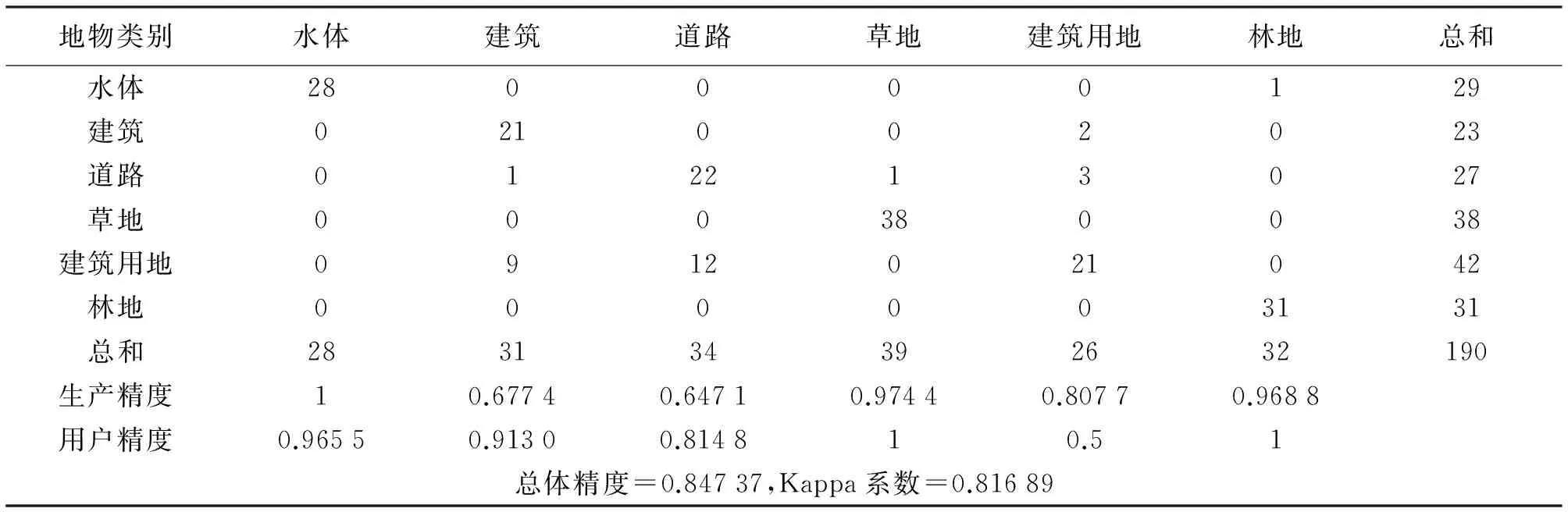
表3 CART分类器面向对象分类混淆矩阵(Scale=10)
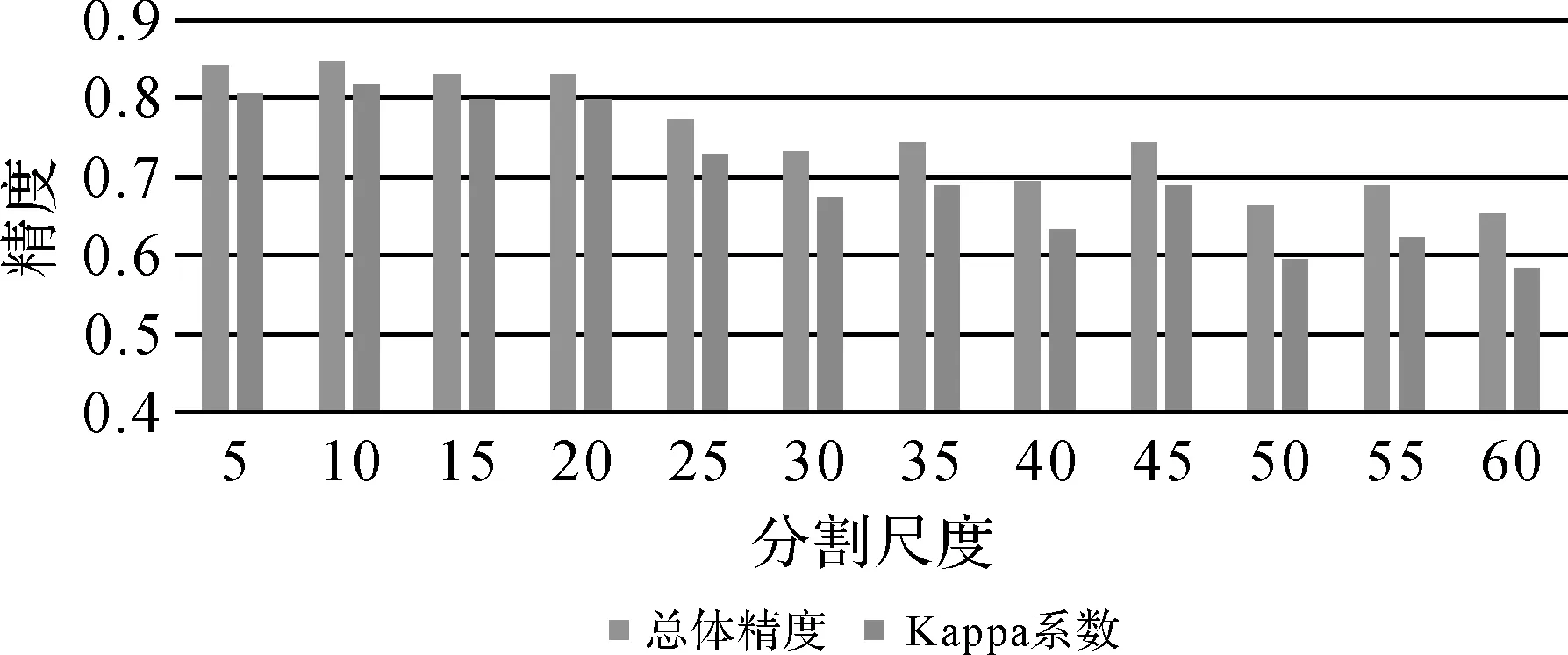
图6 12组分割尺度对应的总体精度和Kappa系数比较
此外,由于道路与建筑用地、建筑与建筑用地之间光谱特征本身就比较相似,导致一定程度上的分类错误,在后续工作中将对此部分内容作具体研究。而如何实现分割参数的自动选取,也将是研究的重点。
参考文献:
[1] 钱茹茹.遥感影像分类方法比较研究[D].西安:长安大学,2007.
[2] 明冬萍,邱玉芳,周文.遥感模式分类中的空间统计学应用——以面向对象的遥感影像农田提取为例[J].测绘学报,2016,45(7):825-833.
[3] VANHAMEL I,PRATIKAKIS I,SAHLI H.Multiscale Gradient Watersheds of Color Images[J].IEEE Transactions on Image Processing:A Publication of the IEEE Signal Processing Society,2003,12(6):617-626.
[4] COMANICIU D,MEER P.Mean Shift:A Robust Approach Toward Feature Space Analysis[J].IEEE Transactions on Pattern Analysis & Machine Intelligence,2002,24(5):603-619.
[5] 周家香.Mean Shift遥感图像分割方法与应用研究[D].长沙:中南大学,2012.
[6] 倪林.基于自适应四叉树分割的遥感图像压缩算法[J].遥感学报,2002,6(5):343-351.
[7] 孙开敏,李德仁,眭海刚.基于多尺度分割的对象级影像平滑算法[J].武汉大学学报(信息科学版),2009,34(4):423-426.
[8] FELZENSZWALB P F,HUTTENLOCHER D P.Efficient Graph-based Image Segmentation[J].International Journal of Computer Vision,2004,59(2):167-181.
[10]黄昕.高分辨率遥感影像多尺度纹理、形状特征提取与面向对象分类研究[D].武汉:武汉大学,2009.
[11]王文杰,赵忠明,朱海青.面向对象特征融合的高分辨率遥感图像变化检测方法[J].计算机应用研究,2009,26(8):3149-3151.
[12]卢官明.一种计算图象形态梯度的多尺度算法[J].中国图象图形学报,2001,6(3):214-218.
[13]丁月平,史玉峰.高空间分辨率遥感影像分类最优分割尺度[J].辽宁工程技术大学学报(自然科学版),2014,33(1):56-61.
[14]贾春阳,李卫华,李小春.基于自适应权值FNEA算法的高分辨率遥感图像分割[J].国土资源遥感,2013,25(4):22-25.
[15]BENZ U C,HOFMANN P,WILLHAUCK G,et al.Multi-resolution,Object-oriented Fuzzy Analysis of Remote Sensing Data for GIS-ready Information[J].ISPRS Journal of Photogrammetry & Remote Sensing,2004,58(3-4):239-258.
[16]王慧贤,靳惠佳,王娇龙,等.k均值聚类引导的遥感影像多尺度分割优化方法[J].测绘学报,2015,44(5):526-532.
猜你喜欢
农业工程学报(2022年12期)2022-09-09
计算机系统应用(2021年2期)2021-02-23
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
电子技术与软件工程(2019年18期)2019-11-18
电子制作(2019年7期)2019-04-25
电子技术与软件工程(2017年14期)2017-09-08
太空探索(2016年5期)2016-07-12
中国交通信息化(2015年6期)2015-06-06
时代英语·高三(2014年5期)2014-08-26
航天返回与遥感(2014年5期)2014-07-31
