薄板坯辅助传动的电控分析
2018-03-30 02:26赵永泽
电子技术与软件工程 2017年16期
赵永泽

摘要
本文针对西门子公司在辅助转动中大量使用不带速度传感器的异步电动机的矢量控制(Masterdrivers)的主回路和系统框图分析。
【关键词】辅助转动 异步电动机
1 主回路和系统框图分析
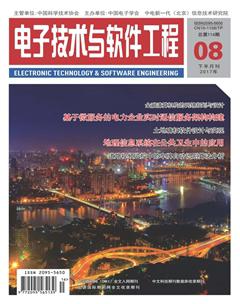
西门子公司采用如图1所示的主回路电路。
(1)变频器中整流电路采用不可控的二极管整流。Ud=1.35U线COSa。
(2)逆变器电路采用三相桥式反并联电路,且功率单元采用开关频率较高的IGBT(绝缘栅双极晶体管)。
(3)直流环节采用带能量缓冲的电容器件。该变频器属电压型变频器
(4)进线电抗器,用于抑制变频器输入侧的谐波电流,改善功率因数,出线电抗器,用于改善变频器输出电流波形和导线的电感效应。
(5)逆变器的六个回馈二极管将再生发电制动状态能量回馈到中间回路的储能电容器。
(6)西门子公司采用公共母线方式拖动多台异步电动机。制动方式有:脉冲电阻型、自耦变压器反馈电网。我厂采用第二种方式。框图如2。
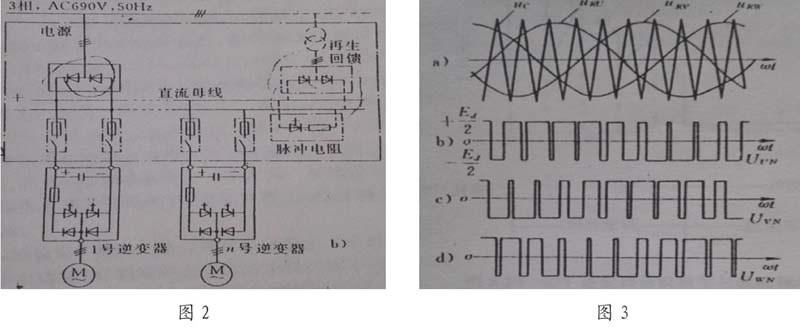
(7)变频器调速时,需要同時调节逆变器的输出电压和频率。西门子公司采用SPWM调制方式。波形图3所示。
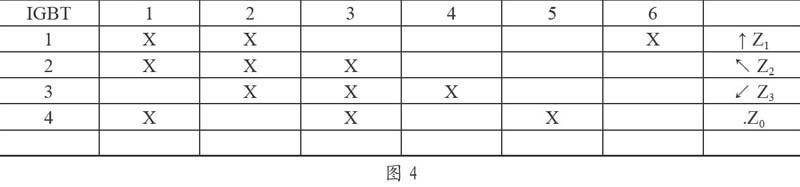
IGBT在上述调制波驱动下,导通情况如图4所示。
2 控制系统分析
框图如图5所示。
注意:稳态运行时,△ω为零,突加负载时,△ω存在。
框图说明如下:
2.1 主通道
主通道由转子角频率给定ω*r,经过给定积分器和限幅值限制于实际的角频率ω*r+△ω经惯性环节作为反馈,它们之差送至速度调节器。该调节器输出转矩信号,通过最大值限幅,该转矩除以弱磁曲线或恒励磁电流得到q轴的电流I*sq。同时它们也给d轴的磁化分量I*sd,它们分别与电流互感器检测的实际电流经3/2变换和VD后得Isq和Isd,它们做差值后,得到I*sq和I*sd,再经电流/电压变换器送到门级驱动电路。
反馈通道角频率的计算。
2.2 电流模型的作用
实际检测到的Isd和Isq和计算出来的Φ经过电流模型的计算得到异步电动机的滑差角频率△ω。
2.3 动态过程中电势模型的作用
电势模型起两方面作用:
(1)在稳态运行中突加负载,转子角频率(速度)下降,产生eds≠O,经过比例积分器产生△ω,该△ω加上转子角频率给定ω*r,即
经惯性环节作为速度反馈,最终调节驱动电路中的电压幅值和频率。
(2)电流模型产生的滑差角频率△ω和反馈的ω'r相加得到同步角频率cos.由于动态中电势模型中另一路输出的△ω与同步角频率cos相加得ω's=ωs+△ω,保证转子磁链定向角,作为矢量旋转VD产生的必不可少的定位角,也同时产生同步调制的调制波。
3 结束语
由于该系统西门子采用转子磁链定向方案,数学模型目前无法推导,特别是电势模型结构新颖,设计巧妙,所以错误在所难免,希望指正。
猜你喜欢
电力自动化设备(2021年11期)2021-11-20
广东电力(2020年1期)2020-03-03
汽车维修技师(2019年7期)2020-01-16
汽车维修技师(2018年11期)2018-05-11
魅力中国(2016年50期)2017-08-11
石油炼制与化工(2017年1期)2017-04-06
清华管理评论(2016年6期)2016-10-18