坦克瞄准精度测量系统设计与精度分析
2018-03-29 05:12邵英琦刘博文冯进良
长春理工大学学报(自然科学版) 2018年1期
邵英琦,刘博文,冯进良
(长春理工大学 光电工程学院,长春 130022)
坦克火炮的瞄准精度是衡量其火力系统性能的重要指标,本文设计了一种新型的检校技术,用坦克瞄准线和坦克火炮轴线在坦克对称面和水平面内的投影的平行度误差表达坦克火炮的瞄准精度,通过将出瞳距转接光学系统和激光准直系统加装在瞄准镜前端,实现准直激光束模拟瞄准线,采集数据的同时方便人眼观察。
1 测量系统工作原理
1.1 测量系统
坦克瞄准线与坦克火炮轴线在坦克对称面和水平面内的是平行,以此条件为依据对坦克瞄准精度进行检校。依据平行校靶方法的通用要求,设计出一套对坦克瞄准线与坦克火炮轴线之间平行度误差的测量系统。测量系统如图1所示,由光源系统、成像系统及图像采集处理系统三部分组成。采用激光器1,2的准直激光光束分别模拟坦克瞄准线和火炮轴线,并在靶面上设置一个长度经过标定的标尺,该标尺位于两光斑附近,CCD相机对光斑图像进行采集,在同一幅图像中同时采集到2个光斑和标尺图像,并将记录下来的图片信息上传计算机上,通过计算光斑质心得到瞄准轴线和火炮轴线位置关系。
1.2 测量原理
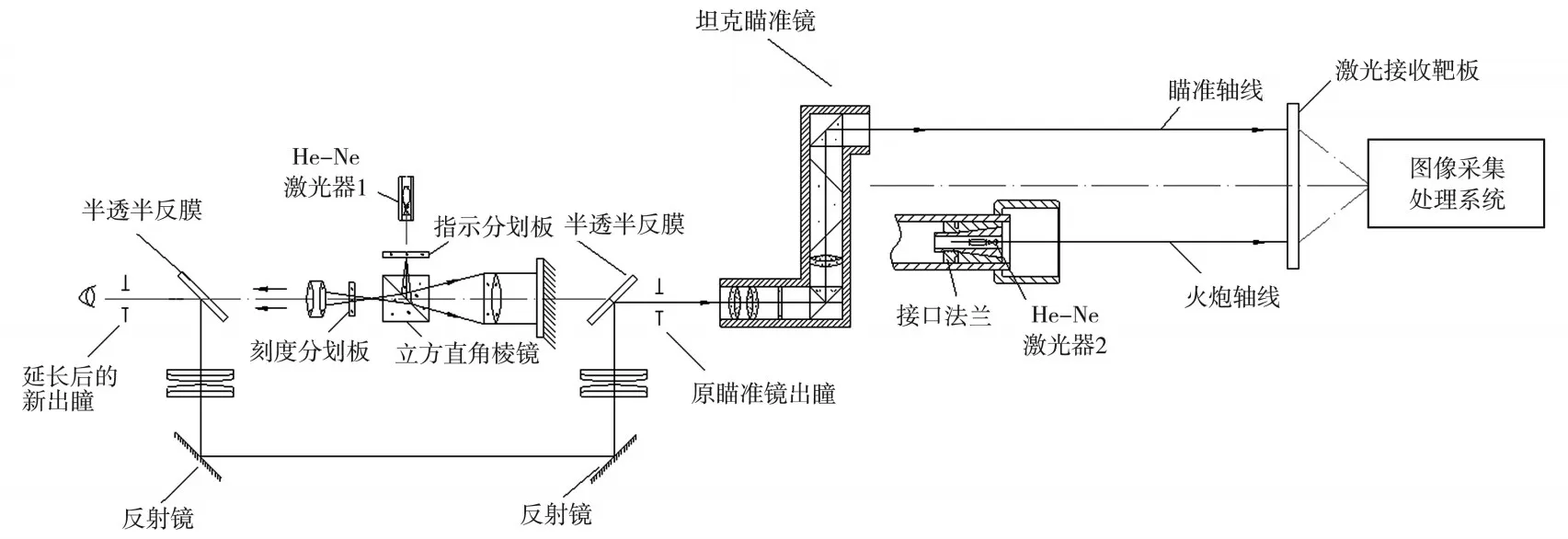
图1 测量系统图
如图2(a)所示,在D1=25m和D2=50m条件下分两次测量。靶板上设置长度标定过的十字标尺,该标尺位于两光斑附近。两次测量结果如图2(b),2(c)所示,两线与靶板相交两点之间的水平位差用Δx1,Δx2表示,垂直位差用Δy1,Δy2表示。瞄准线与火炮轴线在坦克水平面内的平行度误差为Δα,在坦克对称面内的平行度误差为Δβ[2]。

图2 测量原理图

2 系统设计
2.1 光源系统设计
光源系统采用He-Ne激光器,波长为632.8nm,输出功率为2mW。He-Ne激光光束具有高度的方向性、单色性、相干性和能量集中性,结构简单,使用方便。广泛应用于各类轴线的平行度测量。通过对瞄准镜前端出瞳距转接光学系统和炮口激光器夹具的设计,保证激光器光轴与被测对象轴线的同轴度,实现用激光器1,2的光轴分别模拟瞄准线和火炮轴线。
2.1.1 准直激光模拟坦克瞄准镜轴线的设计
由于坦克瞄准镜是一个完整的光学系统,无法实现校靶仪器的插入。本文采用改变瞄准镜出瞳距离的方法,把同轴激光光源安装在观瞄系统前端,实现用准直激光光束模拟瞄准线,测量同时兼顾目视观瞄。具体如图3所示,将出瞳距转接光学系统和体外反射镜与观瞄系统同轴安装,以此为基准安装系统光源。观察自准直仪分划板刻线,调整仪器主体,使十字标线与指示分划板零位重合,瞄准线与激光器光轴同轴。测量时,移除反射镜,使激光束到达目标靶面,得到激光光斑图像。
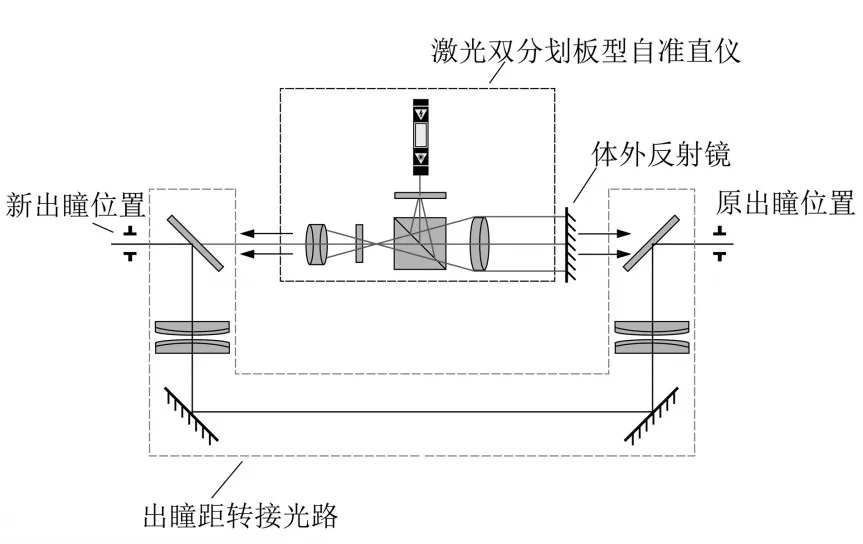
图3 瞄准镜光源装置示意图
2.1.2 准直激光模拟坦克火炮轴线的设计
坦克火炮轴线也采用准直激光来模拟,工作时,需要根据炮管的尺寸配做适合的夹具,将He-Ne激光器固定在炮口轴心位置,以保证激光器轴线和炮口轴线的同轴度。采用图4所示的刚性的接口法兰作为夹具,可以保证平行度在0.01mm以内[3]。

图4 夹具结构图
2.2 成像系统设计
2.2.1 成像系统参数确定
作为测量系统的成像部分,其相关设计参数与系统的测量精度有直接的关系。例如,CCD的像元大小,直接决定了系统的最小误差;系统的畸变也会在一定程度上对测量结果造成影响。因此,成像系统的设计是整个系统的重要一环[4]。

表1 感光芯片CCD主要参数表
选用索尼公司推出的一款APS规格600万像素的CCD系列传感器,适配于尼康D100相机,所选参数如表1所示。芯片尺寸为1/1.8inch,即23.62mm×15.75mm。为了增大像面的利用率,靶面宽与芯片宽高比应相同,约为1.5。结合坦克校靶实际检测情况,这里选用2.3m×1.5m透光薄板作为激光接收靶面。拟定物距为5m,根据靶面尺寸,理论计算出镜头物方视场2ω为:

因为是设计采集靶面光斑点位置识别的光学系统,所以设计畸变必须控制在1%以内,保证测量的精确,进而可以近似像方视场tanω'=tanω,即像方视场2ω'与物方视场2ω相等。根据芯片尺寸,理论计算出光学系统的焦距为:


2.2.2 成像系统设计结果
为了减小测量带来的影响,系统的畸变需要严格控制,因此,选择类双高斯衍变结构设计光学系统。设计波段为可见光波段[5]。根据前面计算的相关参数,设计结果如图5所示。
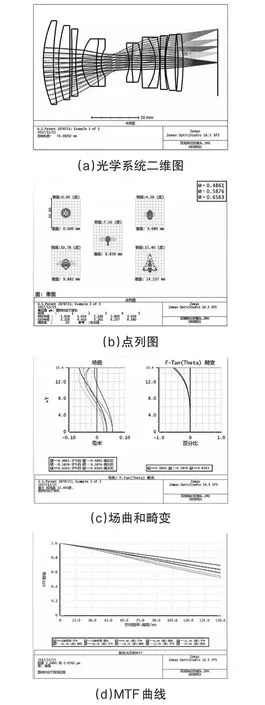
图5 成像系统设计结果
图5(a)为光学系统的2D结构图。由图5(b)可看出,RMS光斑最大半径3.1μm以内,各像差均衡结果较好。由图5(c)可看出,成像系统所有视场的畸变均小于-0.55%,对测量的结果影响很小,几乎可以忽略,由图5(d)可看出,所有视场MTF数值在150线对处均达到0.5以上。从以上设计结果中可以看出,各视场像质均达到较好效果,该镜头符合设计要求。
3MATLAB数字图像处理及数值计算
3.1 图像处理
通过计算机仿真25m处和50m处的靶面采集图,本文采用将图片的RGB颜色空间转换为HSV颜色空间,通过MATLAB工具箱提供的graythresh函数,使用最大类间方差法得到阈值,对灰度图进行阈值分割并得到图像二值化黑白图。并利用bwlabel函数对区域进行标记和Regionprops函数对面积区域属性进行提取,利用cat函数将每个区域的面积属性整合到一起,再将各区域面积大小降序排列,只保留前两个区域去噪声处理,仅保留需要识别的2个光斑点。再次利用Regionprops函数对区域标记和区域质心属性进行提取,链接成一个含质心(x,y)的矩阵,获得质心列表。利用反色,突出目标质心点,其中颜色可合理选择,如图6所示。

图6 质心识别图
3.2 数值计算
通过识别出的位置1,2的光斑质心坐标,并利用公式(1),(2)计算得到本次模拟水平面和坦克对称面火炮轴线方与瞄准镜轴线的投影平行度误差的仿真数值1.27°和1.25°。
4 精度分析
系统的误差来源主要来源于以下几个方面[6]。
4.1 探测器引入误差
所选用的CCD相机的像元尺寸为7.5μm×7.5μm,镜头放大倍率为1/96.722,故相机在靶面上能分辨的距离约为0.726mm。两次测量的测量点间距为25mm,则对应的测角误差为:α1<0.725/25000rad=2.9×10-5rad≈0.029mil。
4.2 激光器装调误差
激光器所采用的夹具全部由刚性元件组成,装配偏心误差为0.01mm,激光器长度为200mm,准直激光光束与炮管轴线不同轴误差α2<0.05mil。
4.3 数字图像处理引起的误差
图像处理时,由于对图像进行灰度和二值化转换,会引起光斑边缘的像素产生一个像素的位置变化误差。由此,由数字图像处理引起的误差α3<0.029mil。
4.4 激光光束同靶面不垂直度引起的误差
瞄准镜激光轴线与靶面不垂直度,可通过自准直仪调整靶面的空间位置控制在1°以内,引起的光斑位置误差ΔL=0.4mm,产生系统的测角误差α4=0.4/25000rad≈0.016mil。
4.5 靶面坐标标尺刻度误差:
基于靶面的加工工艺和板材形变量,刻度误差能控制在0.2mm,由此引起的测角角度误差为α5=0.2/25000rad≈0.008mil。
4.6 误差综合
综上,整个系统总误差表示为:

测量误差在0.07mil以内,能够满足测量需求[7]。
5 结论
本文提出一种采用激光准直光束模拟瞄准镜轴线的新方法,实现对坦克各轴线平行度的检测。实验结果表明:该系统装置的安装和拆卸原理十分简洁,操作方便,测量精度达到0.067mil,能很好的满足要求。对于坦克炮瞄准精度和其他同类武器系统的平行性检校具有良好的应用和开发前景,可以用来指导坦克炮的生产和制造。
[1]崔金河,卢广山.GJB660A-98,机载武器系统校正与校靶通用要求[S].国防科学技术工业委员会,1998-03-16.
[2]李志强.坦克炮管定向精度测试技术的现状与发展[J].兵工学报(坦克装甲车与发动机分册),1999,20(01):38-41.
[3]何东,李乃根.机床夹具精度计算原则的分析[J].机械设计与制造工程,2001,30(04):3-4.
[4]王春艳,李帅,袁济林,等.重复瞄准精度测量系统设计[J].长春理工大学学报:自然科学版,2010,33(02):28-31.
[5]袁旭沧.光学设计[M].北京:科学出版社,1983.
[6]牟达.基于数字图像处理技术的多管火箭炮平行性测量的研究[D].长春:长春理工大学,2003.
猜你喜欢
广东造船(2020年1期)2020-05-03
河北省科学院学报(2020年4期)2020-03-19
科学(2020年6期)2020-02-06
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
西安交通大学学报(2019年9期)2019-09-10
西安交通大学学报(2018年1期)2018-01-12
光学精密工程(2016年5期)2016-11-07
工业设计(2016年4期)2016-05-04