
基于支持向量机的滤波器设计与硬件实现*
2018-03-26 03:33计前程罗小华
传感器与微系统 2018年3期
计前程, 罗小华
(浙江大学 电气工程学院,浙江 杭州 310007)
0 引 言
滤波器是可执行信号处理功能的电子组件。数字滤波器系统包含对输入信号进行采样的模/数转换器,微处理器和一些外围组件,有时使用现场可编程门阵列(field programmable gate array,FPGA)或专用集成电路(application specific integrated circuit,ASIC)代替通用微处理器用于加速滤波操作[1]。
传统的有限脉冲响应(finite impulse response,FIR)滤波器有2种设计方法,窗函数法和频率采样法,存在通阻带边界的频率与波动不易控制等缺陷。自机器学习理论出现后,将神经网络等算法应用到FIR滤波器设计[2]中,取得了良好的效果,同时针对神经网络设计的FIR滤波器进行了硬件实现[3]。此外,开始使用支持向量机(support vector machine,SVM)设计FIR滤波器[4]。
本文使用SVM设计FIR滤波器,并根据FIR滤波器的情况针对SVM进行优化,改进了部分算法。在此基础上,提出了一种基于SVM的FIR滤波器的嵌入式系统。软件实现FIR滤波器的训练部分,硬件实现FIR滤波器的测试部分。滤波器性能良好,满足了基本要求。
1 滤波器结构理论
FIR滤波器属于线性系统。对于N阶因果离散时间FIR滤波器,输出序列的每个值为最近的输入值的加权和
(1)
式中x(n)为输入信号;y(n)为输出信号;N为滤波器阶数;hi为滤波器系数。
FIR滤波器的传递函数可由其冲激响应的z变换获得
(2)
可以得到FIR滤波器的频率响应
(3)
在设计FIR滤波器时,保证h(n)的对称可保证滤波器的相位特性,保证h(n)的大小可保证滤波器的幅值特性。
2 使用SVM设计线性滤波器
2.1 SVM
对于FIR滤波器,其输出可视作二分类问题,可使用SVM[5]作为分类器。
2.2 设计步骤
改写式(1)为向量形式,滤波器系数hi组成一个向量,输入信号x(n)组成另一向量,有
(4)
式(4)为一阶多维线性函数,与线性SVM的决策边界函数非常相似,可以经过简单的变换达到形式上的一致。由于滤波器的输出信号的范围大致在0~1之间,输出结果偏近1的信号为通过信号,输出结果接近0的信号为阻隔信号,可以通过数学方法,引入一个参数α,放大输出信号α倍并减去0.5α,使得y的值标准化,即令
(5)
此时,Y的取值范围大致在-1~+1之间,输出结果偏近+1的信号为通过信号,输出结果接近-1的信号为阻隔信号。考虑截止频率等因素,可以调整放大倍数。此时,式(5)可以看作一个决策边界函数。令
w=α×[h0h1…hN]
(6)
x=[x(n)x(n-1)…x(n-N)]T
(7)
变换后的滤波器函数为
(8)
考虑到训练样本可能存在错误,以及样本在决策空间中的距离可能很接近,引入松弛变量ξ和惩罚参数C。目标函数变为
(9)
由松弛变量的定义可知,松弛变量的取值为
(10)
式中yi实际滤波计算结果经变换后的值;y+,y-为目标结果,值分别为+1,-1。
将滤波器的约束条件施加在目标函数上,获得新的拉格朗日目标函数,该函数为
(11)
对Lp求偏导可获得约束条件。将约束条件施加在拉格朗日目标函数上,可以获得拉格朗日对偶函数。约束条件和拉格朗日对偶函数组成了针对拉格朗日乘子λi、滤波器的系数w和决策边界偏移量b的二次规划方程组
(12)
对式(12)求解,可以得到一组可行的拉格朗日乘子。将其代入到式(13)~式(15)中,即可求得滤波器的参数
(13)
(14)
(15)
2.3 使用核函数
引入核技术解决高维问题:设引入的核为k(xi,xj),代入二次规划方程组后,可解得一组拉格朗日乘子和参数b。核函数有多种,其中,径向基函数(radial basis function,RBF)具有较宽收敛域[6],使用广泛,因此,本文采用RBF核函数。计算如下
(16)
(17)
式中yi为支持向量xi标准化后的输出值;yz为测试向量z在标准化环境下的输出值;yreally为测试向量z在实际情况下应得的输出值。
2.4 参数优化
利用SVM训练16阶II型低通FIR滤波器。在[0,π]间平均取61组数据作为测试样本。
1)求取最少可用的训练集样本数
分别采用2,5,8,11,16,25,40组训练样本进行实验,σ=5,C=10。图1(a)为不同训练样本下的准确率。随着训练样本数的增加,滤波器模型的准确率不断提升。在训练组数达到16组后,准确率变化平缓。考虑硬件设计成本和滤波器准确率等,滤波器模型训练样本选取16组。
2)求取最合适的C值
采用8组C值进行实验,训练样本数为16,σ=5。图1(b)为得到的不同C值下的准确率。随着C值的增加,滤波器的准确率不断提升,但当C值达到一定值之后,滤波器准确率不再变化。可将SVM中的C值设为10。
3)求取最合适的σ值
采用8组σ值对滤波器进行实验,训练样本数为16,C=10。图1(c)为得到的不同σ值下的准确率。可以观察到,当RBF核σ值为20时,滤波器准确率最高。
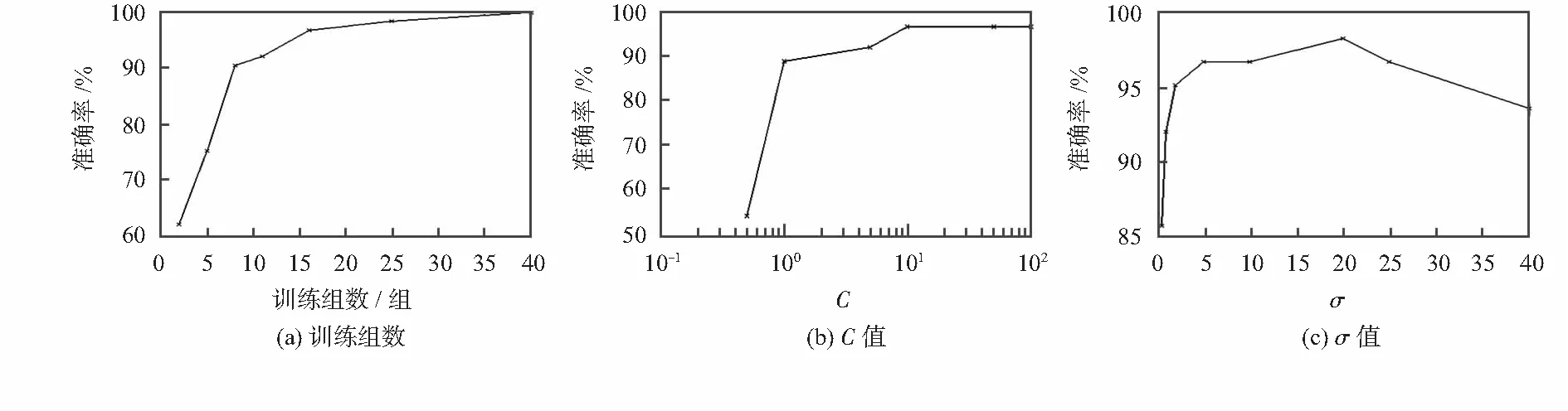
图1 各参数与准确率关系
3 滤波器嵌入式系统设计
3.1 整体系统设计
在Xilinx平台上完成关于基于SVM的FIR 的嵌入式系统设计。权衡设计成本和运算速度,FIR滤波器系统分为硬件和软件2个部分。软件主要实现SVM训练部分和测试部分中的运算框架,而硬件实现SVM中的核运算以乘加运算。图2为基于SVM的FIR 嵌入式系统的整体设计框图。本文通过软处理器核MicroBlaze完成了软件与硬件的连结。
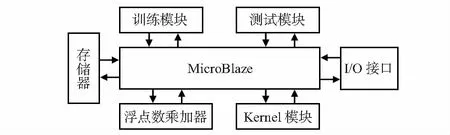
图2 嵌入式系统整体框图
3.2 硬件部分实现
硬件部分实现FIR滤波器系统中频繁使用的部分,浮点数乘加器和核函数模块。整个硬件模块如图3所示。
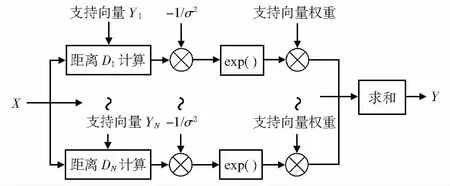
图3 硬件模块整体框图
浮点数乘加器完成使软件程序得到的权值与核函数模块相乘,并将所得到的N个积相加的工作,最终得到一个标准化的y值。核函数模块实现RBF核函数运算,其中包括距离求和运算、乘法运算,以及指数运算。本文指数运算调用CORDIC核[7]。
3.2.1 优化距离求和运算

(18)
在FPGA中,乘法运算会消耗较多的资源和时间,不利于模块内部的并行加速。因此,需简化距离计算公式来优化算法。本文设计的为一维滤波器,可以采用曼哈顿距离公式[8]替代欧几里得距离公式,即
(19)
设计曼哈顿距离计算的电路,如图4所示。曼哈顿距离计算电路由2个加法器、1个比较器和1个选择器组成,实现求取距离差绝对值的功能。
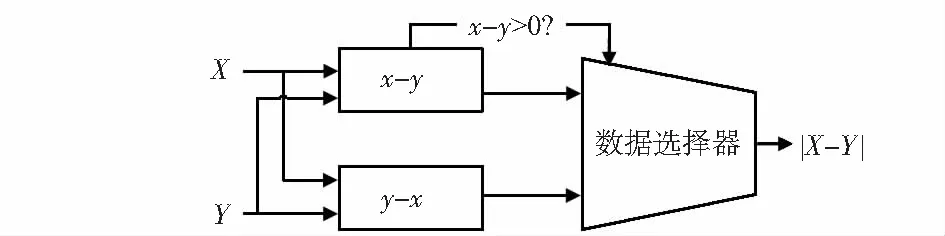
图4 曼哈顿距离计算电路
表1中,在使用流水线情况下,对于RBF核函数,使用欧几里得距离为137个时钟周期,使用曼哈顿距离为133个时钟周期,后者相比前者加速大约3 %。在乘法器的使用量上,后者较前者减少了2/3。由于使用曼哈顿距离会调用较多的加减器、比较器和选择器,会使用较多的查找表(look up table,LUT),因此,LUT的使用量增长与此有关。

表1 硬件使用对比
3.2.2 向量分割
对于一个多维向量,其在输入时会消耗较多的端口,算法在硬件上的读写会被限制。可以将较长的向量分割成为多个小数组,提高端口的使用效率。向量分割时,寄存端口可以分时段地载入或载出数据,可以缩短启动间隔的时间,从而加速流水线。此外,分割后的向量变为多组小数组,在单元运算内部可采用并行计算,以减少单元运算的时间。
3.3 软件部分实现
3.3.1 序列最小优化算法
序列最小优化(sequence minimum optimization,SMO)算法[9]是一种用于解决SVM训练过程中二次规划问题的算法。SMO算法是一个迭代优化算法,其时间复杂度为O(n3)。运算步骤如下:
1)初始化向量的权重λi,权重取随机数,计算此时的偏移值b;
2)初始化每一项的误差Ei;
3)选取两个向量,作为要调整的点;


9)判断是否达到终止条件,如果是,则算法结束;否则,开始执行步骤(3)。

(20)
3.3.2 测试运算

1)初始化,获取拉格朗日乘子,支持向量;
2)计算拉格朗日乘子λi与yi的积;
3)计算关于支持向量xi的核函数;
4)将步骤(2)与步骤(3)的结果相乘;
5)求取和值获得主值w;
6)将w与偏移量b相加得到最终结果。
4 设计实例
最终优化后的SVM滤波器系统工作于100 MHz。系统使用开发板xc7z020clg484。表2中列出了硬件模块在开发板上的资源使用情况。其中,触发器FF使用了4 %,LUT使用了15 %,DSP48被调用了17 %,BRAM的使用率达到了9 %。单次计算并判定测试向量的时间约为3 500 ns。

表2 系统硬件资源使用
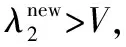
图5(a)为16阶II型低通FIR滤波器的在窗函数法下得到的幅频响应,图5(b)为在SVM设计下得到的幅频响应。SVM设计的FIR滤波器在通带和阻带范围内无过冲,边界控制精确。在[0,π]间平均取61组数据作为测试样本,SVM设计的FIR滤波器准确率可达到98.41 %。
图5 不同设计方法下的幅频响应
5 结 论
基于SVM设计的FIR滤波器在通带和阻带范围内无过冲,边界控制精确。避免了传统滤波器设计方法中矩阵求逆时带来的大量计算,同时也避免了神经网络设计滤波器时需要较多的训练数据,加快了计算速度。本文设计的嵌入式滤波器系统,训练部分用软件实现,测试部分用硬件实现,可以实现资源与速度的平衡。从最终的幅频响应可以观察到,由SVM设计的FIR滤波器的幅频特性可以逼近理性滤波器,较传统方法具有优势。
[1] 刘 鑫,孙大军,滕婷婷,等.一种基于二阶锥规划的浮点分数时延滤波器[J].传感器与微系统,2014,33(12):101-104.
[2] Singh M A,Thakare V B V.Artificial neural network use for design low pass FIR filter a comparison[J].International Journal of Electronics and Electrical Engineering,2015,3(3):216-219.
[3] Kuldeep S Rawat,Massiha G H.Hardware implementation of FIR neural network for applications in time series data predic-tion[J].Indonesian Journal of Electrical Engineering,2015,14(1):130-139.
[4] 孙丰阔,席 斌.基于支持向量回归(SVR)的线性相位FIR滤波器设计[J].福州大学学报,2008,36(1):143-145.
[5] 陈中杰,蒋 刚,蔡 勇.基于SVM一对一多分类算法的二次细分法研究[J].传感器与微系统,2013,32(4):44-47.
[6] Mahnaz Mohammadi,Nitin Satpute,Rohit Ronge,et al.A flexible scalable hardware architecture for radial basis function neural networks[C]∥2015 14th International Conference on Embedded Systems,IEEE,2015:505-510.
[7] Shradha Gupta,Sumeet Saurav,Sanjay Singh,et al.VLSI architecture of exponential block for non-linear SVM classifica-tion[C]∥2015 International Conference on Advances in Computing,Communications and Informatics,IEEE,2015:528-532.
[8] 王一木,潘 赟,龙彦辰,等.基于自组织映射的手写数字识别的并行实现[J].浙江大学学报,2014,48(4):742-747.
[9] Naveenkumar M,Vadivel A.3D projected PCA based DMMfeature fusing with SMO-SVM for human action recognition[C]∥India Twelfth International Conference on Data Mining and Warehousing(ICDMW),Bangalore,India,2016:759-763.
猜你喜欢
中学生数理化(高中版.高考数学)(2022年1期)2022-04-26
数学小灵通(1-2年级)(2020年6期)2020-06-24
电子制作(2019年11期)2019-07-04
数学物理学报(2019年1期)2019-03-21
电子制作(2018年16期)2018-09-26
新青年(2018年8期)2018-08-18
中学生数理化·八年级数学人教版(2017年2期)2017-03-25
咸阳师范学院学报(2016年6期)2017-01-15
系统工程与电子技术(2016年7期)2016-08-21
火控雷达技术(2016年2期)2016-02-06
