
基于MEMS惯性传感器的行人导航轨迹复现研究*
2018-03-26 03:17赵慧,王斌,阮巍
传感器与微系统 2018年3期
赵 慧, 王 斌, 阮 巍
(重庆邮电大学 光电工程学院,重庆 400065)
0 引 言
惯性导航系统(inertial navigation system,INS)可满足无线电信号传播困难的地方对精确导航的需求。行人惯性导航是一种通过微机电系统(micro-electro-mechanical system,MEMS)惯性传感器采集行人运动信息,并运用计算机进行导航解算,及时更新行人的行走方向、位置和速率等信息,从而为行人提供一种可视化导航信息的方法。最近几年,MEMS惯性导航高速发展,体积和功耗不断减小的同时成本也大幅降低,使得MEMS惯性器件成为行人导航的理想选择[1]。
目前,行人惯性导航应用主要有2种方法。一种是采用行人航位推算(pedestrian dead reckoning,PDR)方法,即通过加速度输出值来检测行走的步数、近似步长,磁场或陀螺仪判断航向,推算出行人的位置[2]。文献[3]采用传统惯导与零速检测结合,由于进行滤波优化,最终误差为8.2 %。文献[4]采用步长、步数、航向的方法,最大误差低于总行走距离的3.0 %,但定位精度很大程度上取决于方向角精度以及行人的步行习惯。文献[5]采用了互补滤波将数据融合得到轨迹,行走过程中方向会转变360°,造成较大误差,误差控制在6.3 %。文献[6]采用了粒子滤波算法融合室内地图,室内误差为3.0 %,但航向角不可观测,轨迹容易发生穿墙现象,导致轨迹漂移。文献[7]给出了较好的结果,但采用经验性的方法由于不能识别不同行人的步态变化,故当采用与以往不同的方式进行移动时算法失效。
另一种方法为传统的捷联式惯性导航,即将惯性测量单元(intertial measurement unit,IMU)固定在鞋上,通过处理IMU输出的加速率、角速率值,预测行人的姿态信息和位置[9],此方法不会因为人的改变而失效。因此,本文采用捷联式方法进行实验。将惯性传感器固定于脚面,得到滤波后的加速率和角速率值,实现方位角的修正,从而提高行人导航的定位精度,行走一圈平均误差控制在3 %、行走多圈平均误差在5 %以内。
1 方案设计
为选取合适的惯性测量单元,需考虑多种因素,如重量、体积、采样率、成本及功耗等。本文选取的惯性传感器模块为一集成三轴加速度计与三轴陀螺仪的MPU6050和一三轴数字罗盘HMC5883L。
硬件系统以开源电子原型平台ARDUINO UNO为核心,软件环境为MATLAB。方案设计流程如图1所示,通过三轴加速度计与三轴陀螺仪采集数据,一方面利用捷联式惯性计算,另一方面进行零速检测,满足零速修正(zero velocity update,ZUPT)条件时则触发卡尔曼滤波,与捷联式惯性计算融合,最终得到行人导航位置轨迹。
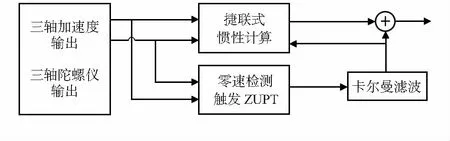
图1 方案设计流程
2 算法实现
为实现完整的行人惯性导航:1)对坐标进行转换,将载体坐标系转换到导航坐标系中,在导航坐标系得到姿态角;2)对经过滤波的加速率和角速率进行零速检测,通过改进的卡尔曼滤波处理,得到行人的惯性导航。
2.1 姿态角初步估计
行人行走是一种低速运动,因此忽略地球自转所带来的影响,只在空间内定义2种坐标系:导航坐标系(n系)和载体坐标系(b系)。
n系为当地水平坐标系,x轴指向北,y轴指向西,z轴与x,y轴满足右手定则指向天,即为北西天坐标系,行人行走的方向和速率均在系内推算。b系三轴与惯性测量单元(inertial measurement unit,IMU)固定,并随着载体的运动而变化,定义x轴为前向,y轴为左向,z轴与x,y轴成右手定则,原点O在IMU的重心,陀螺仪和加速度计的初始值均基于载体坐标系[9]。

(1)


图2 载体—导航坐标转换
2.2 零速检测
零速检测指当行人行走脚落地过程或者行人静止状态下,束有INS的脚在落地期间,理论上,其角速率和加速率均为零。通过检测落脚瞬间,可以人为消除陀螺仪和加速度计输出值的累积误差。
为了精确判断零速度时刻,提高定位精度,本文采用三条件判断法,即三轴总加速度检测、三轴总加速度方差检测和三轴总角速度检测。以“1”表示零速度状态,即脚完全落地的状态。
2.2.1 三轴总加速度检测
当脚落地静止时,基本只受重力作用,此时三轴总加速度的幅值处于2个阈值之间
(2)
其中

(3)
式中 |ak|为三轴总加速度;thamin,thamax为加速度区间阈值。
2.2.2 三轴总加速度方差检测
行人步行过程中,加速度剧烈变化,行人静止时刻,加速度变化平缓,此时三轴总加速度方差处于一个阈值如下
(4)

(5)
则
(6)
式中thσmax为加速度方差的阈值。
2.2.3 三轴总角速度检测
行人步行过程中,角速度剧烈变化,静止时刻,角速度几乎为零,此刻三轴总角速度幅值处于一个阈值范围内
(7)
(8)
式中thωmax为角速度阈值。
上述3个条件通过逻辑“与”(&)运算,即可得到最终落地点,即零速度的时刻
C=C1&C2&C3
(9)
3个判断条件中,设定结果为“1”时表示速度为零,即为脚全部落地时刻。图3为零速检测结果,前3行依次为总加速度检测结果C1、总加速度方差检测C2、总角速度检测C3,第四行为前三行进行逻辑“与”运算得到的结果C。
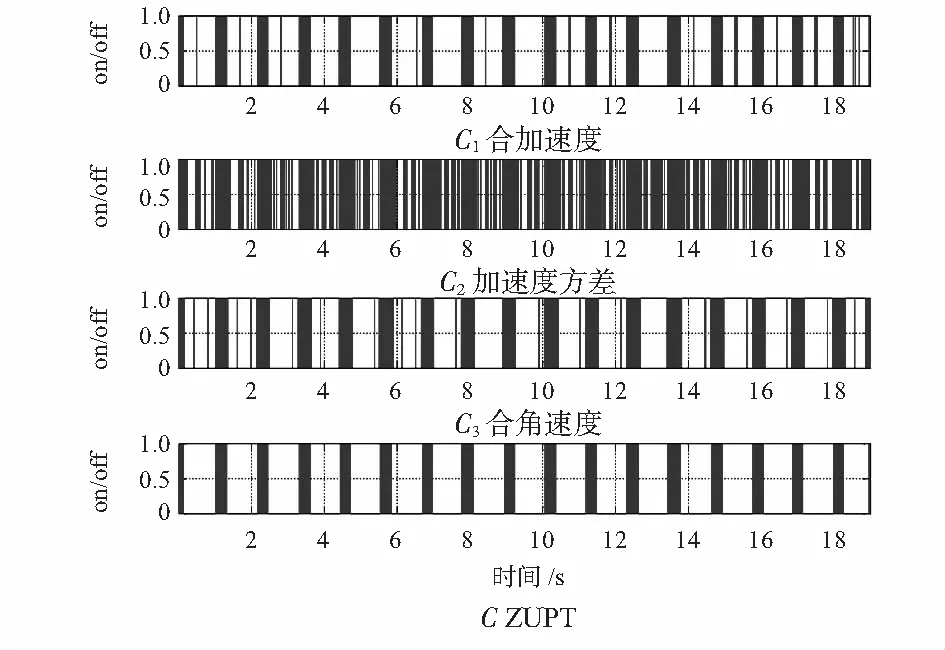
图3 零速检测结果
2.3 卡尔曼滤波优化算法
为了预测零速度时刻的误差,对于卡尔曼滤波,设置其在k时刻的15个状态向量状态∂xk=[∂γk∂vk∂φk∂ak∂wk]。其中,∂γk,∂vk,∂φk分别为位置、速度和姿态向量,而∂ak,∂wk分别为加速度和陀螺仪的漂移错误值[10]。
2.3.1 时间更新
通过加速度和角速度采样值进行导航解算,更新当前状态向量状态∂xk以及相应的四元数q,并根据结果计算卡尔曼滤波中的状态转移矩阵Fk、系统噪声增益矩阵Gk以及协方差矩阵P。
状态转移矩阵为
(10)
式中St为加速度的斜对称矩阵,矩阵元素依据转换成导航坐标系的加速度值创建;B1,B2则分别为加速度和陀螺仪的偏差相关常数。
(11)
(12)
2.3.2 测量更新
计算当前卡尔曼增益,并将速度信息作为系统速度误差的测量值,再根据状态估计更新方程对行人的速度、位置进行重新估计,同时计算系统的姿态矩阵,最终得到新的速度、位置和姿态角信息。
3 实验验证
为了验证设计的行人导航系统的可行性,在室外绕圆形路线,在室内绕矩形路线进行行走实验。
3.1 圆形路线测试
实际路线为绕直径为13.00 m的圆形,绕实际路径进行顺时针行走一圈得到结果如图4所示,测量的误差为2.8 %,实验行走的落脚点落在实际路线的外围,原因为左脚位于人体中心左侧,与实际情况相符,最终导航结果满足导航要求。

图4 圆形轨迹落脚点轨迹
3.2 方形路线测试
实际矩形路线为6.20 m×6.70 m,如图6中点划线所示。图5为仅用加速率和角速率直接累积得到的导航位置,误差结果很大。图6为经过修正得到的位置轨迹,误差主要产生在转弯处,测得误差为2.8 %,满足导航要求。图7为绕矩形方块行走3圈的轨迹,计算误差为4.2 %,产生误差的原因主要包括:磁力计的偏差、步行运动的抖动以及转弯时产生的偏差。

图5 矩形形状直接解算轨迹

图6 矩形形状单圈导航轨迹

图7 矩形形状3圈导航轨迹
3.3 对比结果
为了验证算法的准确性,将本文测量结果与其他文献结果进行比较,如表1所示。

表1 不同方法得到的轨迹对比 %
4 结 论
采用低精度的MEMS惯性器件,通过分析行人行走的步态特征,利用卡尔曼滤波算法和零速检测,实现了行人行走的轨迹复现。实验结果表明:一次行走路径圆形与矩形时测量误差均小于3 %,较好地满足了行人导航的需求。轨迹复现的过程中有一定延时,原因为行人按实际路径行走时传感器采集数据上传至MATLAB软件,MATLAB软件运算产生了延迟,如何减少延迟时间成为下一步的工作目标。
[1] Hazas M,Scott J,Krumm J.Location-aware computing comes of age[J].Computer,2004,37(2):95-97.
[2] Jimenez A R.Indoor pedestrian navigation using an INS and EKF framework for yaw drift reduction and a foot-mounted IMU[C]∥Positioning Navigation and Communication,2010.
[3] 万骏炜,曾庆化,陈磊江,等.行人惯性导航系统平台设计与实现[J].计算机应用与软件,2015,1(2):45-47.
[4] 李金凤,王庆辉,刘晓梅,等.基于MEMS惯性传感器的行人航位推算系统[J].传感器与微系统,2014,33(12):85-87.
[5] 肖永健,肖 力,孙志刚,等.基于步行者航位推算的井下人员辅助定位[J].太赫兹科学与电子信息学报,2013,6(4):583-587.
[6] 崔 潇,秦永元,周 琪,等.鞋式个人导航系统算法和试验研究[J].测控技术,2013,32(3):138-142.
[7] Renaudin V,Yalak O,Tomé P,et al.Indoor navigation of emergency agents[J].European Journal of Navigation,2007,5(3):52-58.
[8] Caruso J.Application of magneto resistive sensors in navigation systems[J].Sensors and Actuators,1997,1220(1):15-21.
[9] 秦永元.惯性导航[M].2版,北京:科学出版社,2006:5-8.
[10] 杨 辉.基于MEMS传感器的高精度行人导航算法研究[D].厦门:厦门大学,2014.
猜你喜欢
导航定位学报(2022年5期)2022-10-13
北京航空航天大学学报(2022年7期)2022-08-06
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
军民两用技术与产品(2021年7期)2021-10-13
导航定位学报(2021年1期)2021-03-01
湖北农机化(2020年4期)2020-07-24
中国惯性技术学报(2019年3期)2019-10-15
中学生数理化·八年级物理人教版(2017年3期)2017-11-09
导航与控制(2016年4期)2016-09-23
中国惯性技术学报(2015年1期)2015-12-19
