
磁液变形镜的镜面动力学建模和实验验证∗
2018-03-26 22:44:48张柱吴智政江新祥王园园朱进利李峰
物理学报 2018年3期
张柱 吴智政† 江新祥 王园园 朱进利 李峰
1)(上海大学精密机械工程系,上海 200072)
2)(上海理工大学电气工程系,上海 200093)
1 引 言
磁性液体(magnetic fluid),又称磁性流体,是磁性纳米微粒分散在基载液中形成的具有磁性又具有流动性的稳定胶体[1].当磁性液体处于磁场中时,悬浮的磁性纳米微粒受到磁场作用力而影响基载液的流动性,利用变化的磁场与其相互作用能控制流体的运动[2,3].1965年,美国国家航空航天局(NASA)的Papell[4]首次将磁性液体用于宇航服可动部位的密封和火箭液体燃料在失重情况下的输送.经过50多年的发展,磁性液体已经在密封[5]、润滑[6]、阻尼减震[7]、生物医疗[8]、光学[9]等诸多领域得到广泛应用.
利用磁性液体既具有液体的流动性,又具有可以被外磁场磁化而拥有磁性的特点,通过改变磁性液体周围的磁场来精确控制磁性液体表面的变形.Nguyen等[10]提出了一种利用永磁铁和平面线圈产生的磁场来控制微磁性液滴尺寸大小的方法.Liu等[11]设计了一种基于流体聚焦结构的微流控芯片,利用U型电磁线圈产生的磁场来控制磁性液滴的尺寸大小和运动速度.Brousseau等[12,13]基于磁性液体设计了一种液态可变形反射镜来纠正光学系统中的波前像差和控制激光束的波前,反射镜的镜面由液体下方的电磁线圈阵列产生的磁场发生变形.Borra等[14]设计了一种通电铜导线网格驱动器驱动的磁液变形镜,用来校正液体望远镜系统中因大观测角度和运行过程中速度波动引起的离轴像差,但是镜面面形对输入电流的响应是非线性的.Iqbal和Amara[15]通过亥姆霍兹线圈在磁性液体区域产生大均匀垂直磁场的方法,使磁液变形镜的镜面响应线性化并且增大了镜面变形行程.因为磁液液体镜面低反射率的缺点使得磁液变形镜不能有效地应用于自适应光学系统中,文献[16–18]通过在磁性液体表面覆盖一层银液状薄膜或者弹性反射薄膜的方法有效地提高了变形镜镜面的反射率.Wu等[19,20]通过Maxwell线圈产生大均匀磁场和微小电磁驱动线圈产生的扰动磁场来精确控制磁液变形镜的镜面变形,证明了其镜面变形行程能达到100µm并能精确控制激光束的波前.相比于传统的固态变形镜[21−23]和液晶空间光调制器[24−26],磁液变形镜具有镜面连续平滑、变形行程大、制造成本低、驱动器易扩展等优点.
由于磁液中的磁性纳米颗粒相互之间的磁吸引力、van der Waals力和表面活性剂产生的排斥力,磁液受流体磁压力、热力学压力的影响,使得在重力场、电场和磁场多物理场耦合情况下很难对磁液变形镜镜面变形进行准确的建模.Ghaffari等[27]运用Maxwell方程和动量方程对磁性液滴建模,采用水平集(level set)和流体体积(volume of fluid)相耦合的方法对受均匀磁场作用的磁性液滴的聚集形状进行了数值模拟和实验验证.Shi等[28]运用Maxwell方程和两相流Navier-Stokes方程对处于均匀磁场中运动的磁性液滴进行了建模,采用VOSET界面追踪数值方法来仿真磁性液滴的表面形状;文献[3]分别建立了在水平和垂直均匀磁场作用下的磁性液体液面变形模型,但假设变形磁液面只发生整体向上的变形,变形之后的液面仍然是水平的,无法产生特定的面形.Brousseau等[12,13]对磁液变形镜在扰动磁场作用下的镜面响应进行了推导计算,但是为了简化推导过程,只计算了镜面在最大变形处的静态变形量,因而无法从该变形模型中获得各个驱动器之间的影响函数及系统的动态性能.Wu等[19]针对受均匀磁场和扰动磁场相叠的磁场作用的磁性液体,在柱坐标系下运用Laplace方程和Maxwell方程对液面的变形建模,引入第一类和第二类Bessel函数,采用分离变量的方法推导出磁液变形镜的动力学方程.但是这一类建模都是针对圆形的磁液变形镜,而且也没有考虑磁液容器的厚度,导致模型的精度降低.
在一些领域,例如激光微加工系统[29]、微激光推进系统[30]和高能激光系统[31]等中,激光束的几何轮廓是方形的,圆形几何形状的变形镜因为镜面利用率低以及驱动器的圆形或者三角形排布方式而不能有效地控制方形激光束的波前.为了更有效地控制方形激光束的波前和纠正波前像差,本文以基于方形驱动器阵列的磁液变形镜为例,考虑磁性液体受重力场、电场和磁场多物理场耦合的作用,在笛卡尔坐标中运用Laplace方程和Maxwell方程,并且在考虑磁液容器厚度的情况下建立了磁液变形镜的模型,通过引入欧拉函数和采用分离变量的方法推导出磁液变形镜的镜面动力学方程.然后基于该理论模型,设计了磁液变形镜的结构和参数以满足镜面变形要求.最后通过MATLAB,COMSOL Multiphysics和Tracepro软件联合仿真及在自适应光学系统中的实验测试,验证了所建模型的准确性和磁液变形镜的响应性能.
2 磁液变形镜建模
如图1所示,磁液变形镜在笛卡尔坐标系中可以表示为一个立方体形的磁性液体.镜面的面形定义为液面相对于初始平整状态时的变形.设镜面在任一点(x,y)处的变形为ζ(x,y,t),是通过磁性液体下方驱动器产生的扰动磁场而发生的变形.设磁液的厚度为d,磁液面到容器底部的距离为h,容器的长宽分别为Lx和Ly.表1列出了建立磁液变形镜模型所涉及的参量.
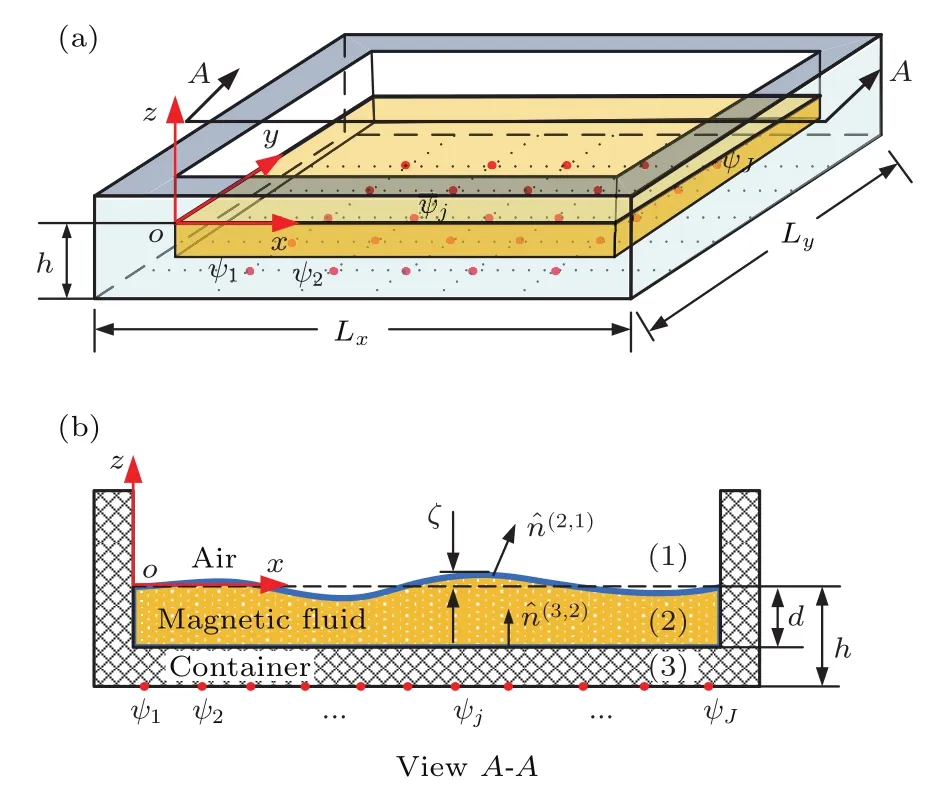
图1 方形磁液变形镜示意图(a)三维视图;(b)A-A剖面图Fig.1.Geometric representation of the square magnetic fluid deformable mirror:(a)Three-dimensional view;(b)A-A view.
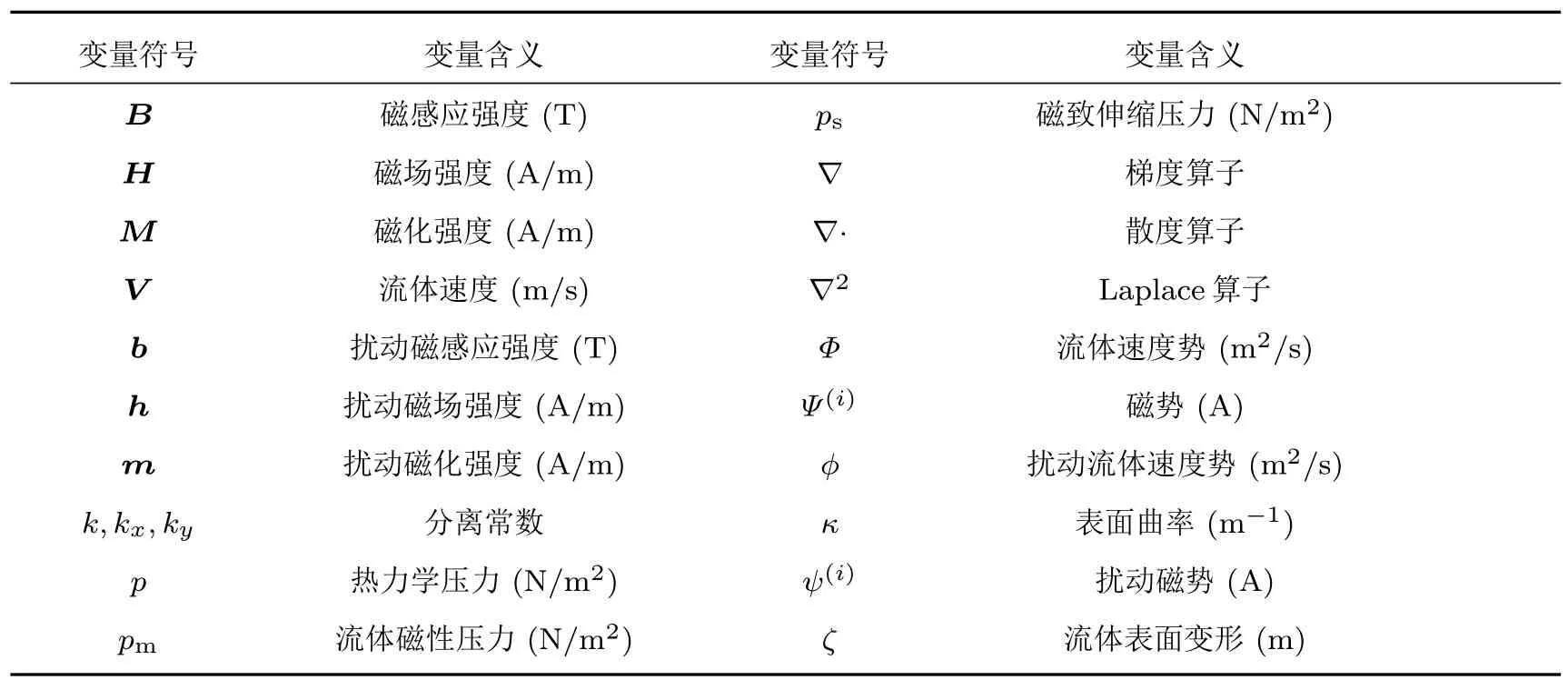
表1 符号说明Table 1.List of symbols.
2.1 磁液的控制方程
磁性液体自由表面的变形遵循流体动力学的基本原理,考虑磁场的影响并根据质量和动量守恒定理,磁液流体场的控制方程式为[3]
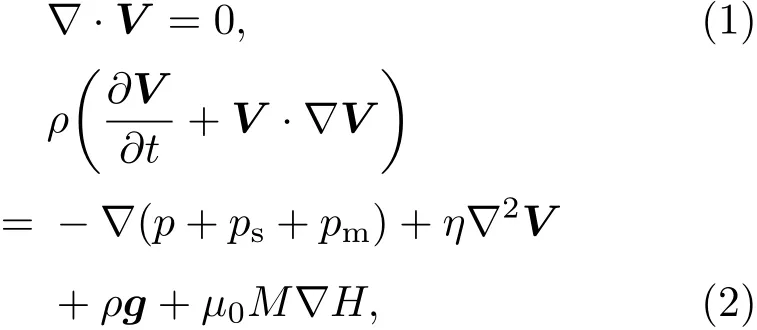
式中,V表示流体速度;p,ps和pm分别表示热力学压力、磁致伸缩压力,磁性压力;ρ和η分别表示流体的密度和黏度;µ0表示真空磁导率;M和H分别是磁化强度矢量M和磁场强度矢量H的大小.
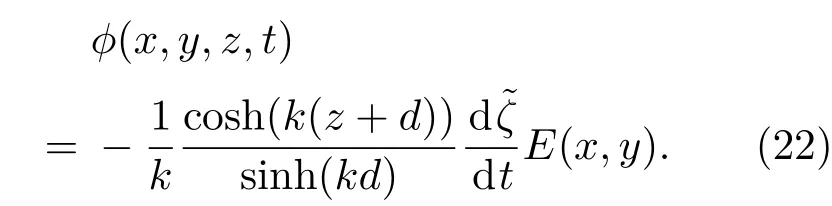
假设磁性液体是不可压缩、非旋流体,磁性液体上方的空气是不可磁化而且磁导率是各向均匀的,且磁致伸缩压力ps可忽略不计,那么结合方程(1),磁性液体的速度势Φ和磁势Ψ(i)满足下列方程:

式中,是磁液面的单位法向量,为空气热力学压力;2σκ是毛细压力,表示为磁液表面张力系数σ和表面的平均曲率κ的函数,Vz是磁流体速度V的垂直分量,V用标量势Φ表示为V=−∇Φ.磁场强度向量H(i)用标量势表示为分别表示磁液面上方的空气区域、磁性液体区域和容器底部区域.

通过求解方程(3)和(4)可以得到ζ,ϕ,ψ(i),i=1,2,3的解.但是方程(4)是关于磁势Ψ(i)的非线性方程,线性求解方法不适用于求解这种形式的方程.为了简化该方程的求解,Brousseau等[13]推导出了磁性液体面形在变形最大处的解:这里µr是磁性液体的相对磁导率,Hn和Ht是磁场强度的法向和切向分量.从结果中可以看出磁性液体的最大变形与输入磁场是非线性二次型关系.这就意味着传统的线性控制算法不适用于磁液变形镜镜面面形的控制.因为镜面变形与输入磁场的平方成正比,镜面只能产生单向的变形,也就是磁性液体只能向上凸起变形,不能向下凹变形.
为了使磁性液体镜面响应线性化,从而能运用现有成熟的线性控制算法控制镜面面形,本文提出了将磁通量密度为B0大均匀垂直磁场施加于整个磁性液体区域的方法使磁液变形镜的输出线性化.由于在整个磁性液体区域施加的为均匀磁场,磁场的梯度为0,其镜面的初始状态将仍然保持完全水平,即ζ=0,从而方程(4)左边的ρgζ项和项为0,磁液面的单位法向量,磁性液体的速度势Φ0和磁势Ψ0(i)满足下列方程:


这里ψ(i)是扰动磁场强度h(i)(i=1,2,3)相对应的磁势,它们之间的关系式为

将方程(8),(9)和(10)代入到方程(4)中得到如下等式:

将方程(6),(8),(9)代入到方程(3),将方程(7)代入到方程(11),得到如下等式:

2.2 镜面响应推导
以下采用分离变量的方法对ζ,ϕ和ψ(i),(i=1,2,3)这五个未知量求解:


这里

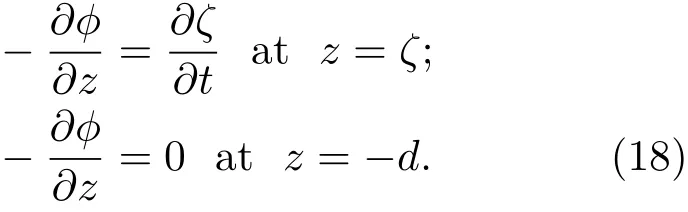
其中kx和ky为模数.方程(12)中的Laplace方程∇2ϕ=0将根据以下两个边界条件求解:
根据方程(12)和(15),得到如下的常微分方程:

该微分方程(19)的通解形式为


运用边界条件(18),同时求解A(t)和B(t),从而得到

将A(t)和B(t)代入到方程(21)得到ϕ的解为
方程(12)中的磁场ψ(i),i=1,2,3将基于下面的边界条件求解:

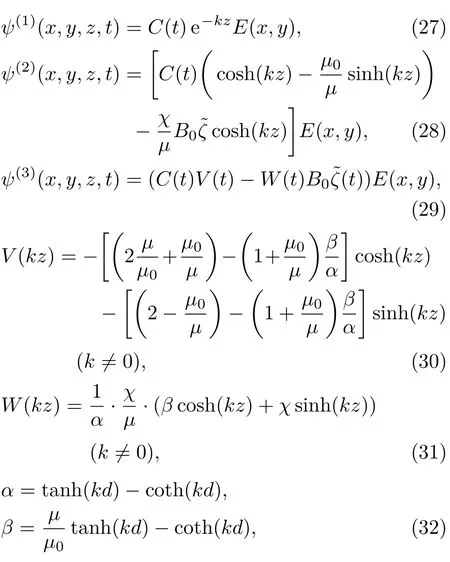
这里C(t)是积分常数,将使用方程(26)来确定其值;对于k=0的特殊情况,V(kz)=1,W(kz)=1.
考虑到垂直于容器壁的速度和磁场分量必须为零的条件,得到如下模态振型:

和特征方程

模态方程(33)需要满足特征方程(34)和(35),E(x,y)必须为

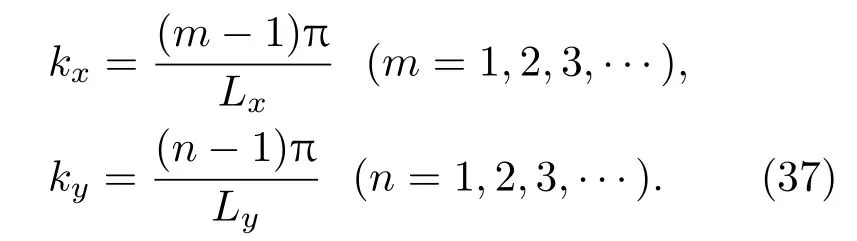
等式(34)–(36)可以由无穷多个离散值kx和ky来求解,即
以输入磁势方程(26)作为边界条件,根据模态振型的正交性确定每个模态相对应的参数C(t)为
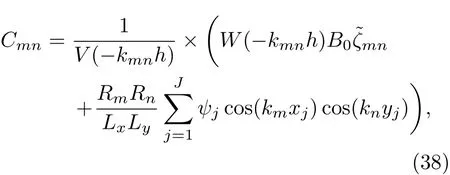
这里km,kn和kmn分别表示kx,ky和k对应于模数m,n的离散参数;变量Rm和Rn为

将上述对ϕ,ψ(1),ψ(2)和ψ(3)求得的解方程(22),(27),(28)和(29)代入到方程(13)得到如下等式:
将方程(38)代入到方程(39)中以及考虑到文献[32]中提到的磁液黏性对阻尼效应的影响,可以获得磁液变形镜镜面动力学方程为
其中

通过求解二阶微分方程(40)可以得到磁液变形镜镜面广义变形量,从而在任一位置(xk,yk)处镜面的变形为

磁液变形镜镜面响应方程(41)可进一步表述为相应的状态空间表达形式:
这里x是系统的状态向量,i=[i1,i2,i3,···,iJ]T是微线圈阵列的输入电流向量,ys=[ζ1,ζ2,ζ3,···,ζK]T是磁液变形镜镜面在各个采样点处的变形量;As,Bs和Cs为相应的系统矩阵.
3 磁液变形镜的设计和仿真
3.1 结构和参数设计
在本节中提出了磁液变形镜的设计方法,并以产生抛物面面形为例来设计基于方形微线圈驱动器阵列的磁液变形镜.为了使磁液变形镜的变形线性化以及能产生大变形行程,采用Maxwell线圈产生大均匀垂直磁场.基于推导的理论模型,为了使磁液变形镜产生100µm以上的变形行程,运用COMSOL Multiphysics仿真软件确定大均匀磁场的磁通量密度B0和微线圈在磁液面处产生的最大扰动磁场bz分别为7 mT和0.4 mT.Maxwell线圈由三个分立线圈组成,结构参数如图2所示,为了在Maxwell线圈内部产生一个较大的均匀磁场,上下两个小线圈与中间大线圈的安匝比必须满足49:64,上下两个小线圈的半径与中间大线圈的距离分别为.根据毕奥-萨伐尔定律,在Maxwell线圈中心处的磁场为

这里N是中间线圈的匝数,R为中间线圈的半径,I为电流的大小.为了使Maxwell线圈能在其中心产生B0=7 mT的均匀磁场,中间线圈的半径确定为R=100 mm.当输入电流I=500 mA时,根据方程(43)中心线圈的匝数确定为N=1125,上下线圈的匝数都为883.Maxwell线圈的参数如表2所列.
根据状态空间方程(42),磁液变形镜的镜面在输入电流为i0时的静态响应表示为


那么镜面实际面形与期望面形的RMS误差为

这里K表示镜面变形的采样点数.根据bz=4 mT的设计要求,确定微线圈的外径和内径分别为4 mm和2 mm,AWG36铜线匝数为800匝[34].基于方程(45)和(46),为了使RMS误差值小于以及能让磁液变形镜的相邻驱动器之间的耦合系数位于15%–35%之间[35],确定微线圈中心间距为4.2 mm,并采用如图2所示的正方形排布.
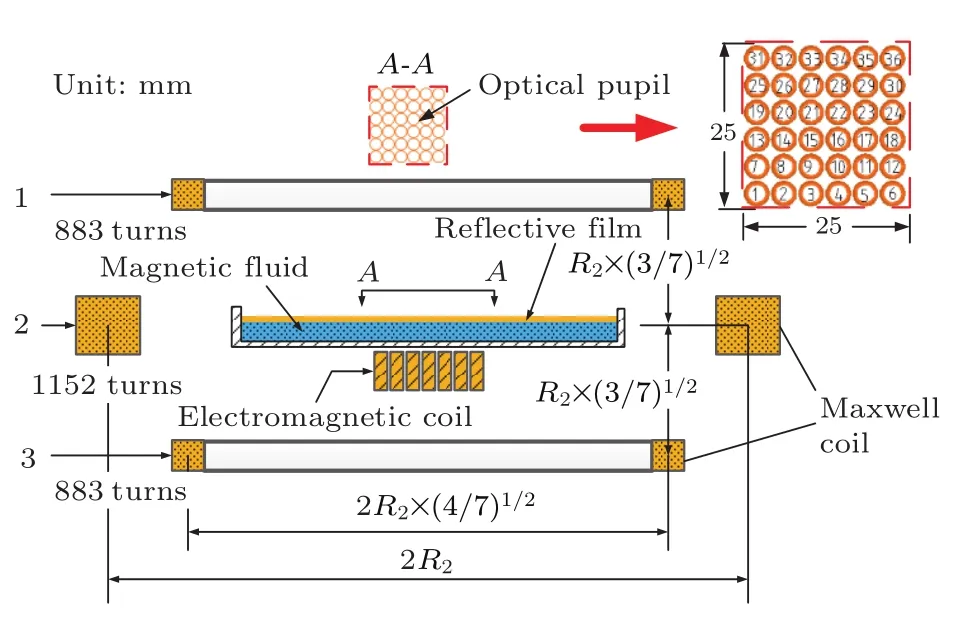
图2 方形磁液变形镜装置的结构示意图Fig.2.Schematic diagram of the square magnetic fluid deformable mirror.

表2 Maxwell线圈参数Table 2.Parameters of the Maxwell coil.
3.2 仿真结果
基于上述推导的模型和所设计的结构参数,利用COMSOL Multiphysics和MATLAB软件联合仿真了方形磁液变形镜的镜面响应.仿真中磁液的基本参数和模型参数如表3所列.首先,对单一线圈施加电流后的镜面响应进行了仿真分析.对中心线圈施加恒定电流后的镜面面形仿真结果如图3(a)和图3(b)所示,从图中可以看出,单一通电微线圈所产生的镜面为高斯面形,而且其峰值位于通电线圈中心的正上方.图3(c)所示为中心微线圈在通−60–60 mA电流下产生的镜面形状二维轮廓曲线,由图可知线圈之间的交连值约为30%,当微线圈的输入电流为60 mA时,磁液变形镜实现了100µm以上的大行程响应.镜面在微线圈阵列通入(45)式所示的电流后所产生的抛物面面形仿真结果如图4所示.

表3 仿真参数Table 3.Simulation parameters.
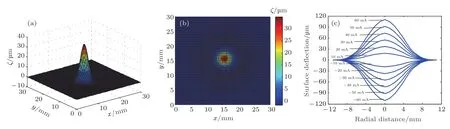
图3 中心微线圈在通15 mA电流下产生的镜面面形的仿真结果(a)三维视图;(b)俯视图;(c)镜面面形x轴向轮廓图Fig.3.The surface de flection of the central coil with current of 15 mA:(a)Three-dimensional view;(b)top view;(c)x pro file of surface de flection.
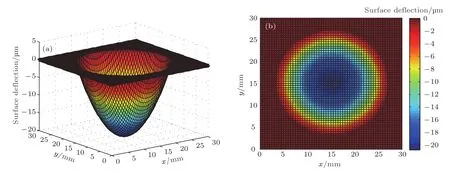
图4 基于理论模型所产生的抛物面面形(a)三维视图;(b)俯视图Fig.4.The parabolic surface shape generated by the magnetic fluid deformable mirror:(a)Threedimensional view;(b)top view.
利用MATLAB,COMSOL Multiphysics和Tracepro软件对方形磁液变形镜的镜面产生方形聚焦激光束进行了联合仿真并分析该聚焦光束的质量.图5为自适应光学系统仿真示意图,利用第一级R1和R2第二级光束扩束组和对激光源所产生的圆形光束进行放大,放大后的光束通过孔径为15 mm×15 mm方形光阑得到方形光束.抛物面对方形光束聚焦后并以7°–10°的反射角度将其反射到波前传感器和电荷耦合器(CCD)相机上,CCD相机放置在聚焦光路z=20 mm处.为了使聚焦后的光束全部位于波前传感器的传感区域,反射光束需要第三级缩束组R3进行缩小.在图6中可以看出聚焦光束的轮廓仍然是方形的,并且光束的强度分布很均匀.
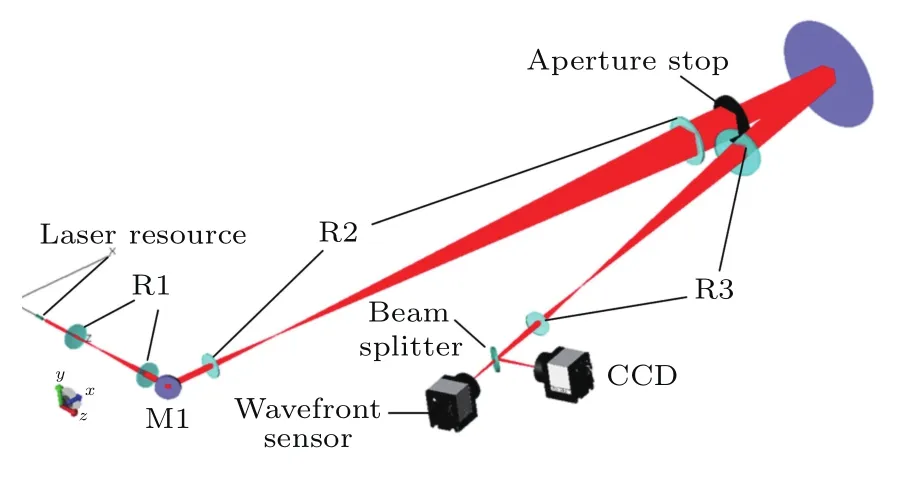
图5 自适应光学系统仿真示意图Fig.5.Layout of simulation adaptive optics system.
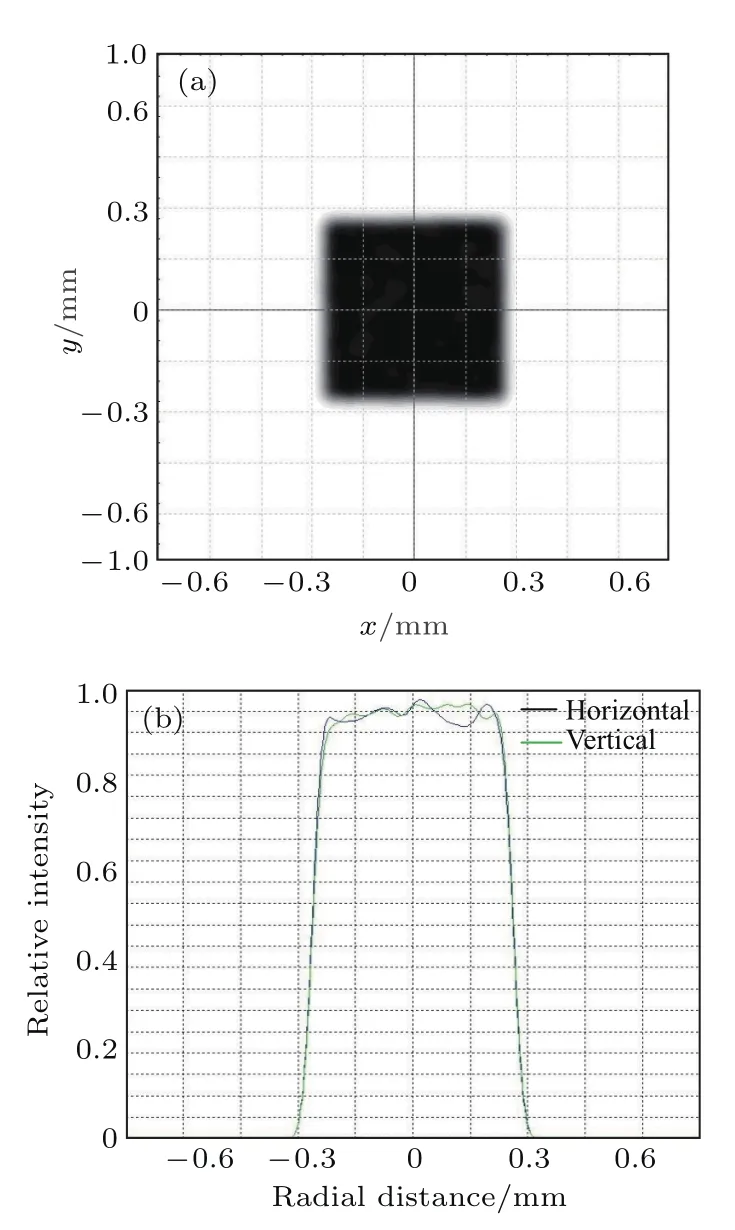
图6(a)聚焦光束能量分布图;(b)x和y轴向能量分布图Fig.6.(a)The pro file of focused beam;(b)x and y pro file of focused beam.
4 实验验证
4.1 磁液变形镜镜面线性响应和动力学特性
根据上述所设计的结构参数,制作了磁液变形镜原型样机.如图7所示,该磁液变形镜主要由方形微线圈阵列、Maxwell线圈、磁性液体和容器支架组成.在本节中,首先通过实验验证磁液变形镜镜面大行程线性响应特性.如图8所示,用激光多普勒干涉仪(Polytec,Germany)测量微线圈中心正上方处镜面的变形量,微线圈从−60 mA到60 mA每隔10 mA依次加载电流,并记录镜面的变形量.在实验过程中,Maxwell线圈的驱动电流为500 mA,在中心区域产生的磁通量密度为7 mT.

图7 磁液变形镜装置(a)Maxwell线圈;(b)微线圈阵列;(c)磁性液体Fig.7.The magnetic fluid deformable mirror:(a)The Maxwell coil;(b)electromagnetic coils array;(c)the container with magnetic fluid.

图8 磁液变形镜镜面线性响应实验测试平台Fig.8.Experimental setup for linear surface response of magnetic fluid deformable mirror.
如图9所示,蓝色“°”标记点和红色“∇”标记点分别表示磁液变形镜的解析模型和实际镜面在微线圈中心正上方所产生静态面形的波峰或波谷值,蓝色虚线和红色点划线分别表示解析模型镜面和实际镜面变形量的拟合曲线.可以明显地看出,在微线圈中心正上方的镜面响应输出与输入电流成线性关系,并能实现镜面的双向100µm以上的变形.
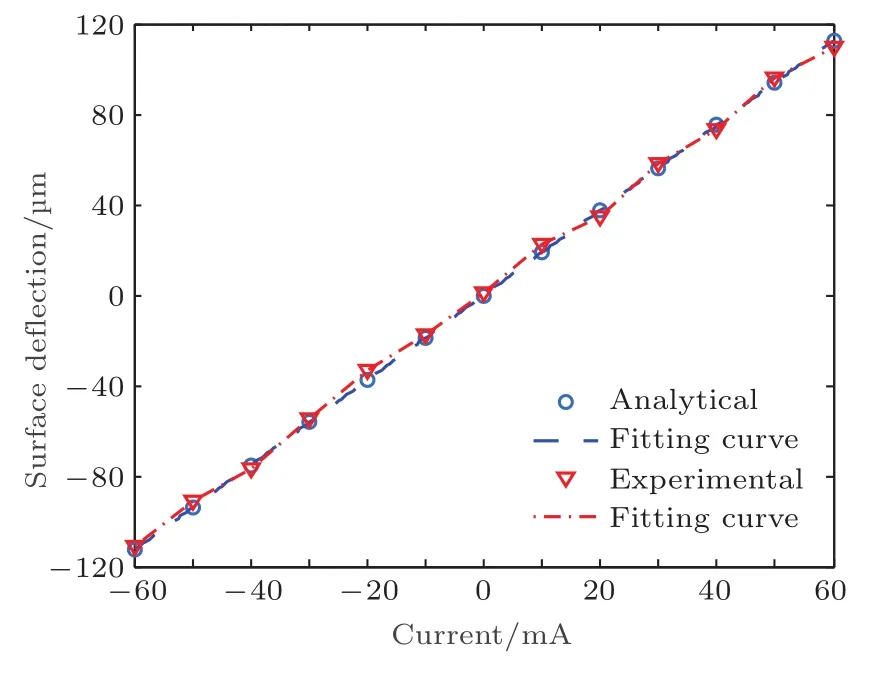
图9 磁液变形镜镜面在微线圈中心正上方处的变形量Fig.9.The surface de flection at the top of the miniature electromagnetic coil center.
为了验证磁液变形镜在微线圈驱动下镜面响应的影响函数和线性叠加特性,根据仿真系统搭建了基于波前传感器的自适应光学系统,图10所示为该系统实验测试平台.测试实验系统由激光光源、磁液变形镜、波前传感器、CCD相机、计算机控制平台和反射镜、光束扩束透镜组、光束缩束透镜组、分束镜、光阑等光学元器件组成.夏克-哈特曼型波前传感器(WFS150-5C,THORLABS,USA)用来测量镜面的面形.CCD相机(DCU223C,THORLABS,USA)用于对聚焦光束的成像和测量聚焦光束的几何尺寸和强度分布.
图11(a)所示为单一微线圈在通15 mA电流时磁液变形镜镜面面形,图11(b)所示为基于波前传感器记录的数据得到的镜面面形和轴向轮廓图.可以看出,单一微线圈产生的镜面面形近似为高斯形,并且相邻驱动器之间的耦合系数约为30%.因为WFS150-5C波前传感器的变形行程检测范围小于60µm,所以实验中微线圈的输入电流控制在−25–25 mA之间.

图10 基于波前传感器的磁液变形镜镜面控制实验平台Fig.10.Layout of the experimental system setup based on the wavefront sensor.
图12所示是验证磁液变形镜镜面响应在各个采样点处的线性叠加结果.在图12(a)中,以“°”标记的点代表中心的微线圈(#15)分别在输入电流为25 mA和−15 mA时的镜面响应,两种镜面响应曲线的叠加结果如红色实线所示.绿色虚线代表#15线圈在输入电流为10 mA时的镜面响应.在图12(b)中,以“×”标记的点分别代表#15线圈和其左边最近的#16线圈分别在输入电流为20 mA和−10 mA时的镜面响应,绿色虚线则代表这两种镜面响应的算术和;当两个线圈同时输入上述电流时镜面的响应如红色实线所示.从图12可以看出,代表实验结果的红色实线与代表线性算术和的绿色虚线基本重合.结合图9和图12可以看出,磁液变形镜不仅在微线圈中心正上方的响应输出与输入电流成线性关系,在整个镜面面形各点的响应输出也与输入电流成线性关系,而且不同驱动器之间的输出响应满足线性叠加原理.从而能使用已经成熟应用于固态变形镜的线性控制算法控制磁液变形镜的镜面面形.

图11 单个微线圈通15 mA电流所产生的镜面面形(a)镜面面形三维视图;(b)镜面面形的x和y轴向轮廓图Fig.11.The surface de flection of a single coil with a current of 15 mA:(a)The three-dimensional display of the de flection obtained using the wavefront sensor;(b)x and y pro file of the surface de flection.

图12 镜面响应的线性叠加性(a)同一线圈输入不同电流;(b)不同位置的线圈输入不同电流Fig.12.Linear addition of surface de flection:(a)Linear relationship at a single coil with different currents;(b)linear relationship between two different coils.
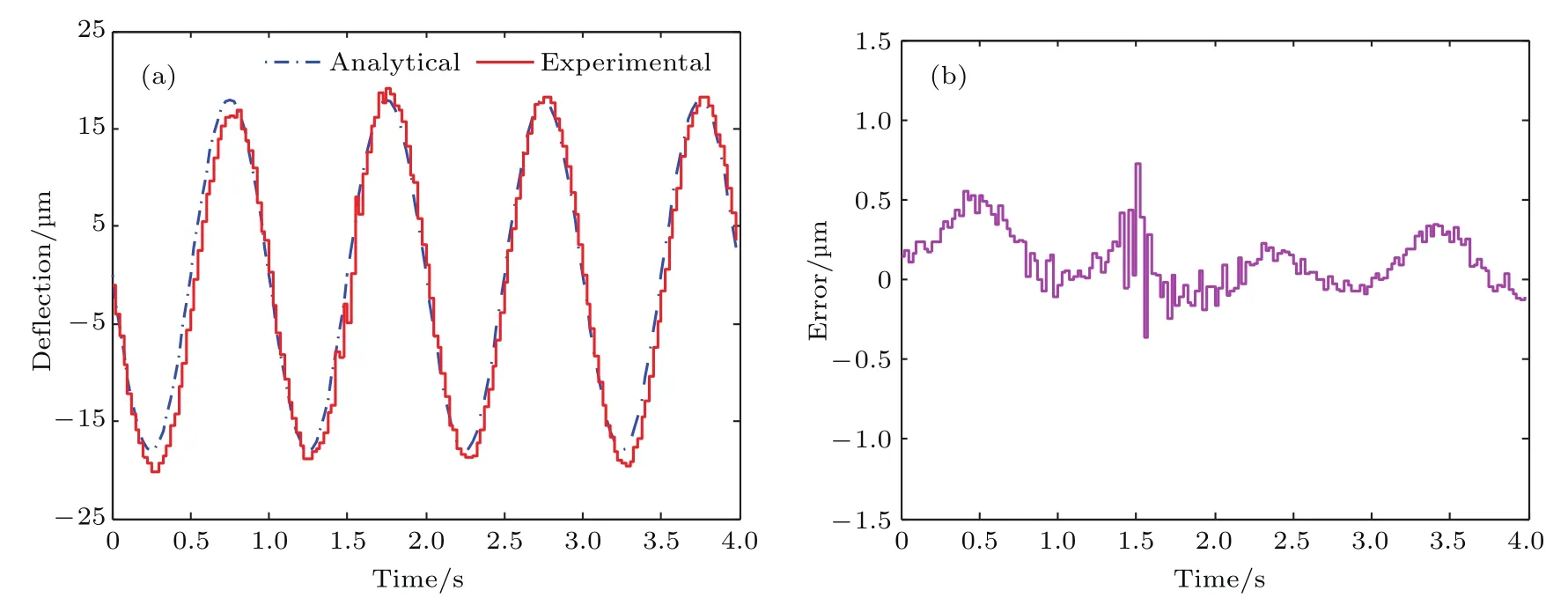
图13 磁液变形镜镜面的动态响应(a)镜面响应;(b)响应误差Fig.13.Dynamic response of the magnetic fluid deformable mirror:(a)Surface de flection;(b)error.
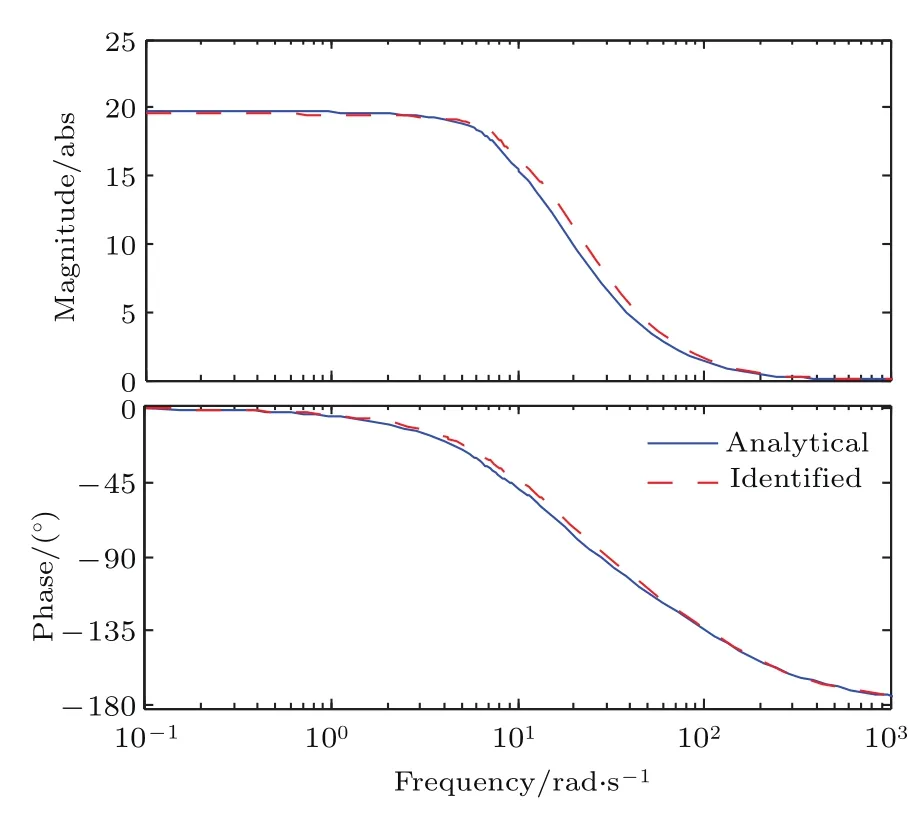
图14 磁液变形镜镜面响应模型的伯德图Fig.14.Bode plot of the magnetic fluid deformable mirror system.
为了验证磁液变形镜镜面动力学性能,磁液变形镜镜面在正弦信号下的响应如图13所示,其中输入中心微线圈的正弦电流幅值为10 mA,频率为1 Hz.图13(a)中的红色实线为磁液变形镜实际响应曲线,蓝色点划线为理论推导模型的响应曲线.图13(b)为镜面实际响应与理论推导模型的响应误差,误差范围在4.5%以内.此外,对磁液变形镜镜面在0 Hz到150 Hz随时间变化的扫频电流信号作用下的响应进行了实验验证.图14所示红色点划线为磁液变形镜实验辨识模型的伯德图,蓝色实线为理论推导模型的伯德图,由图13和图14可以看出基于理论推导模型的镜面响应与实验结果相符,说明磁液变形镜的镜面响应理论推导模型基本准确.
4.2 方形激光束聚焦实验
为了验证磁液变形镜对激光束波前的控制性能,利用所搭建的自适应光学系统来控制磁液变形镜产生抛物面形.由磁液变形镜所产生的期望镜面面形为,由方程(45)计算得到的电流i输入到微线圈驱动器阵列中,图15所示为波前传感器记录的磁液变形镜所产生的镜面抛物面形,从图中可以看出抛物面的最大变形约为20µm,且面形同图4的仿真结果比较符合.相对应在CCD相机中获得的方形聚焦光斑如图16所示,方形聚焦光斑的尺寸为480µm×480µm,包含了90%以上的激光源总能量,而且光斑强度分布均匀.实验结果表明本文设计的方形磁液变形镜可以产生期望的镜面面形,并能有效地控制方形激光束从而获得均匀的聚焦光斑,验证了推导模型的准确性.如结合现有成熟的固态变形镜镜面控制算法可实时控制磁液变形镜的镜面面形,以获得不同焦距的方形聚焦光,或用以纠正自适应光学系统中光束的时变像差.

图15 磁液变形镜产生的抛物面镜面面形(a)轴测图;(b)俯视图Fig.15.The parabolic shape from experimental result:(a)Isometric view;(b)top view.
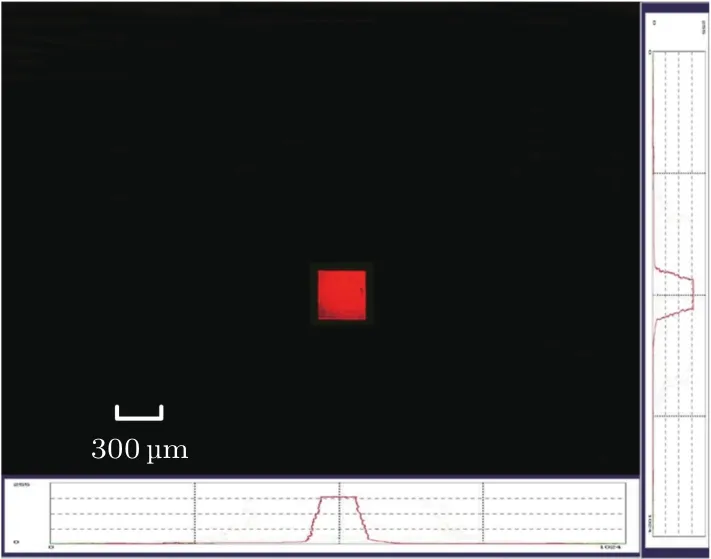
图16 基于磁液变形镜所产生抛物面获得的光束聚焦光束Fig.16.Focused spot generated by parabolic shape of the magnetic fluid deformable mirror.
5 结 论
本文在磁性液体受重力场、电场和磁场多物理场耦合情况下,考虑磁液中的磁性纳米颗粒相互之间的作用力和磁液受流体磁压力、磁致伸缩压力的影响,以方形微线圈阵列驱动的磁液变形镜为例,运用Maxwell方程组和Laplace方程,在考虑磁液容器厚度的情况下,通过引入欧拉函数和分离变量的方法在笛卡尔直角坐标系中推导出了磁液变形镜的镜面动力学模型.然后基于推导的模型,设计了满足光束波前控制要求的变形镜结构和参数,并进行仿真验证.最后搭建了基于磁液变形镜的自适应光学系统,验证了推导模型的准确性以及所设计磁液变形镜镜面响应线性度,实验结果表明该磁液变形镜能产生精确的镜面面形并具有良好的激光束波前控制性能.
[1]Rosensweig R E 1985Ferrohydrodynamics(Cambridge:Cambridge University Press)pp1–64
[2]Wang A R,Xu G,Shu C J 2010Magnetic Fluid and Applications(Chengdu:Southwest Jiaotong University Press)pp1–20(in Chinese)[王安蓉,许刚,舒纯军 2010磁性液体及其应用 (成都:西南交通大学出版社)第1–20页]
[3]Li D C 2010Theory and Applications of Magnetic Fluid Seal(Beijing:Science Press)pp38–68(in Chinese)[李德才 2010磁性液体密封理论及应用 (北京:科学出版社)第38–68页]
[4]Papell S S 1965US Patent3 215 572
[5]Yuichi M,Hiroshi S,Hayato Y,Hidenori S 2015Procedia CIRP33 581
[6]Rajesh C S,Parsania M M 2013Am.J.Math.Stat.3 179
[7]Yao J,Chang J J,Li D C,Yang X L 2016J.Magn.Magn.Mater.402 28
[8]Mitamura Y,Yano T,Nakamura W,Okamoto E 2013Bio-Med.Mater.Eng.23 63
[9]Dave V,Virpura H A,Patel R J 2015 AIP Conf.Proc.1665 050139
[10]Nguyen N T,Beyzavi A,Ng K M,Huang X Y 2007 Micro fluid Nano fluid 3 571
[11]Liu J,Tan S H,Yap Y F,Ng M Y,Nguyen N T 2011 Micro fluid Nano fluid 11 177
[12]Brousseau D,Borra E F,Hubert J R,Parent J 2006 Opt.Express 14 11486
[13]Brousseau D,Borra E F,Thibault S 2007 Opt.Express 15 18190
[14]Borra E F,Brousseau D,Cliche M,Parent J 2008 Mon.Not.R.Astron.Soc.391 1925
[15]Iqbal A,Amara F B 2008 Int.J.Optomechatroni.2 126
[16]Ritcey A M,Borra E 2010 ChemPhysChem 11 981
[17]Lemmer A J,Griffths I M,GroffT D,Rousing A W,Kasdin N J 2016 Proc.SPIE 9912 99122K
[18]Dery J P,Brousseau D,Rochette M,Borra E F,Ritcey A M 2016 J.Appl.Polym.Sci.134 44542
[19]Wu Z Z,Kong X H,Wu J Q,Liu M,Xie S R 2016 Chin.J.Sci.Instrum.37 1509(in Chinese)[吴智政,孔祥会,吴君秋,刘梅,谢少荣2016仪器仪表学报37 1509]
[20]Wu Z Z,Kong X H,Zhang Z,Wu J Q,Wang T,Liu M 2017 Micromachines 8 72
[21]Bayanna A R,Louis R E,Chatterjee A,Mathew S K,Venkatakrishnan P 2015 Appl.Opt.54 1727
[22]Bastaits R,Alaluf D,Horodinca M,Romanescu I,Burda I,Martic G,Rodrigues G,Preumont A 2014 Appl.Opt.53 6635
[23]Du R Q,Zhang X J 2011 Opto-Electron.Eng.38 30
[24]Calero V,García-Martínez P,Albero J 2013 Opt.Lett.38 4663
[25]Yao K,Wang J,Liu X,Liu W 2014 Opt.Express 22 17216
[26]Peng F,Lee Y,Luo Z,Wu S 2015 Opt.Lett.40 5097
[27]Ghaffaria A,Hashemabadi S H,Bazmib M 2015 Colloid.Surface A 481 186
[28]Shi D,Bi Q,Zhou R 2014 Numer.Heat Tr.A:Appl.66 144
[29]Akhtar S N,Sharma S,Dayal G,Ramakrishna S A,Ramkumar J 2015 J.Micromech.Microeng.25 065001
[30]Jiao L,Cai J,Ma H H,Li G X,Shen Z W,Tang Z P 2014 Appl.Surf.Sci.301 481
[31]Marmo J,Injeyan H,Komine H,McNaught S,Machan J,Sollee J 2009 Proc.SPIE 7195 719507A
[32]Wu Z Z,Iqbal A,Ben Amara F 2013 Modeling and Control of Magnetic Fluid Deformable Mirrors for Adaptive Optics Systems(New York:Springer)pp99–115
[33]Caprari R S 1995 Meas.Sci.Technol.6 593
[34]Wu J Q,Wu Z Z,Kong X H,Zhang Z,Liu M 2017 Optoelectron.Lett.13 90
[35]Lu F,He Z W 2012 Comput.Simul.29 1006(in Chinese)[卢飞,何忠武 2012计算机仿真 29 1006]
猜你喜欢
航天返回与遥感(2022年3期)2022-07-07 05:13:36
数学小灵通·3-4年级(2022年5期)2022-06-01 07:41:02
快乐语文(2021年34期)2022-01-18 06:04:06
电子技术应用(2021年1期)2021-01-22 09:45:06
VOGUE服饰与美容(2019年10期)2019-12-02 07:34:49
航天返回与遥感(2018年2期)2018-05-17 09:37:57
军事文摘·科学少年(2017年4期)2017-06-20 23:22:10
材料科学与工程学报(2016年2期)2017-01-15 13:34:42
光学精密工程(2016年7期)2016-08-23 06:36:49
家用汽车(2016年4期)2016-02-28 02:24:04
