任意平面阵干涉仪二维测向方法*
2018-03-24 01:38:30刘金彦郭福成
航天电子对抗 2018年1期
张 敏,刘金彦,郭福成
(1.国防科技大学电子科学学院,湖南 长沙 410073; 2.武警警官学院,四川 成都 610200)
0 引言
估计信号来波方向(AOA),又称之为测向,在电子侦察、监视、预警、通信等领域受到广泛关注和研究[1-4]。其中基于相位干涉仪的测向技术,由于其原理简单、测向精度高,应用越来越广泛[3 ]。当基线长度大于信号半倍波长时,相位差测量可能会出现2π模糊。解相位差的2π模糊是干涉仪测向研究中的主要问题[4]之一。
一种常用的方法是采用长短基线干涉仪形成多基线实现解模糊。如文献[5]基于长短组合基线、文献[6]基于剩余定理互质基线和文献[7]虚拟基线的解模糊方法,但这都要求多组基线之间有一定的几何约束关系,因此限制了干涉仪基线的布阵,且通常仅适用于线阵,较难推广到任意平面阵。
文献[8]的无模糊长基线解模糊方法,仅适用于特定的平面阵型,且该方法中对相位差的多次代数运算造成了较大的测向误差。文献[9]聚类法和文献[10]立体基线解模糊方法通常可适用于任意平面阵,但此类方法仅由特定的几组基线得到多个待定的角度估计,利用剩余基线在此待定角度中选取一个值作为估计值,不能达到测向理论精度。
文献[11]相关干涉仪测向方法可适用于任何阵型干涉仪,且使用了所有基线用于测向,但是基于网格搜索的相关干涉仪测向方法需要将网格划分得足够小,才能得到较好的结果,特别是二维测向条件下,计算量大,实时性差。粒子群优化(PSO)等智能方法虽然运算量有所降低,但由于采用随机搜索策略,在粒子数量较少的情况下,全局寻优能力并不是十分可靠[12]。
文献[13]中的最小二乘(LS)测向适用于任何阵型干涉仪,且使用了所有基线用于测向,但要求相位差无模糊。在主动雷达中,文献[14]中直接利用多个观测站上的干涉仪测量的模糊相位差,对运动目标进行定位跟踪。文献[15]中利用旋转干涉仪模糊相位差直接对固定辐射源定位。这说明直接利用模糊相位差进行测向估计具有可行性。
在此思路下,本文提出了一种多假设非线性最小二乘(Multiple Hypothesis Taylor Series,MHTS)干涉仪测向算法。该算法使用所有基线用于测向,无需事先解相位差模糊,直接利用模糊相位差进行测向,对干涉仪几何构型无特殊要求。
首先给出后文一些数学符号定义:T表示矩阵转置运算,mod表示取模运算,·表示向下取整运算,|·|表示取绝对值运算,‖·‖表示取2范数运算,IN表示N×N维单位矩阵,0N表示N×N维零矩阵。
1 数学模型
1.1 测向模型
本文中方位角α∈[-π,π]定义为入射信号在XOY平面上的投影射线OT′与Y轴正方向的夹角;俯仰角β∈[0,π/2]定义为入射信号与其在XOY平面上的投影射线OT′之间的夹角,如图1所示。
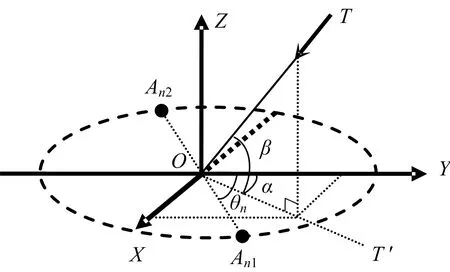
图1 入射角度定义示意图
对应的干涉仪到辐射源的视线矢量为:

(1)
接收天线An1和An2构成的干涉仪基线n长度为dn,方位安装角为θn,对于二维平面阵,俯仰安装角εn=0,对应的基线指向矢量为:

(2)
因此不妨将视线矢量和基线矢量写为:

(3)

(4)
由此可得干涉仪测量得到的无模糊相位差为:
φn=gnθ+δn,n=1,2,…,N
(5)

当干涉仪基线长度dn>λ/2时,相位差测量可能会出现2π模糊,因此有:
φn=gnθ+δnmod2π
(6)
式中,φn∈-π,π。
将无模糊相位差写成矩阵形式:
Θ=Gθ+E
(7)

将对应的模糊相位差的矩阵形式为:
Φ=Gθ+Emod2π
(8)

模糊相位差中包含了辐射源角度信息,干涉仪测向问题即是如何利用N组干涉仪基线测量得到模糊相位差,估计出方位和俯仰角。
1.2 相位差噪声模型
多通道干涉仪如图2所示,接收通道对天线接收的信号进行低噪声放大、混频、滤波、A/D等处理,经过FFT等处理得到接收信号到达不同天线的初相位。通过对不同基线的两个天线的初相位相减得到相位差。
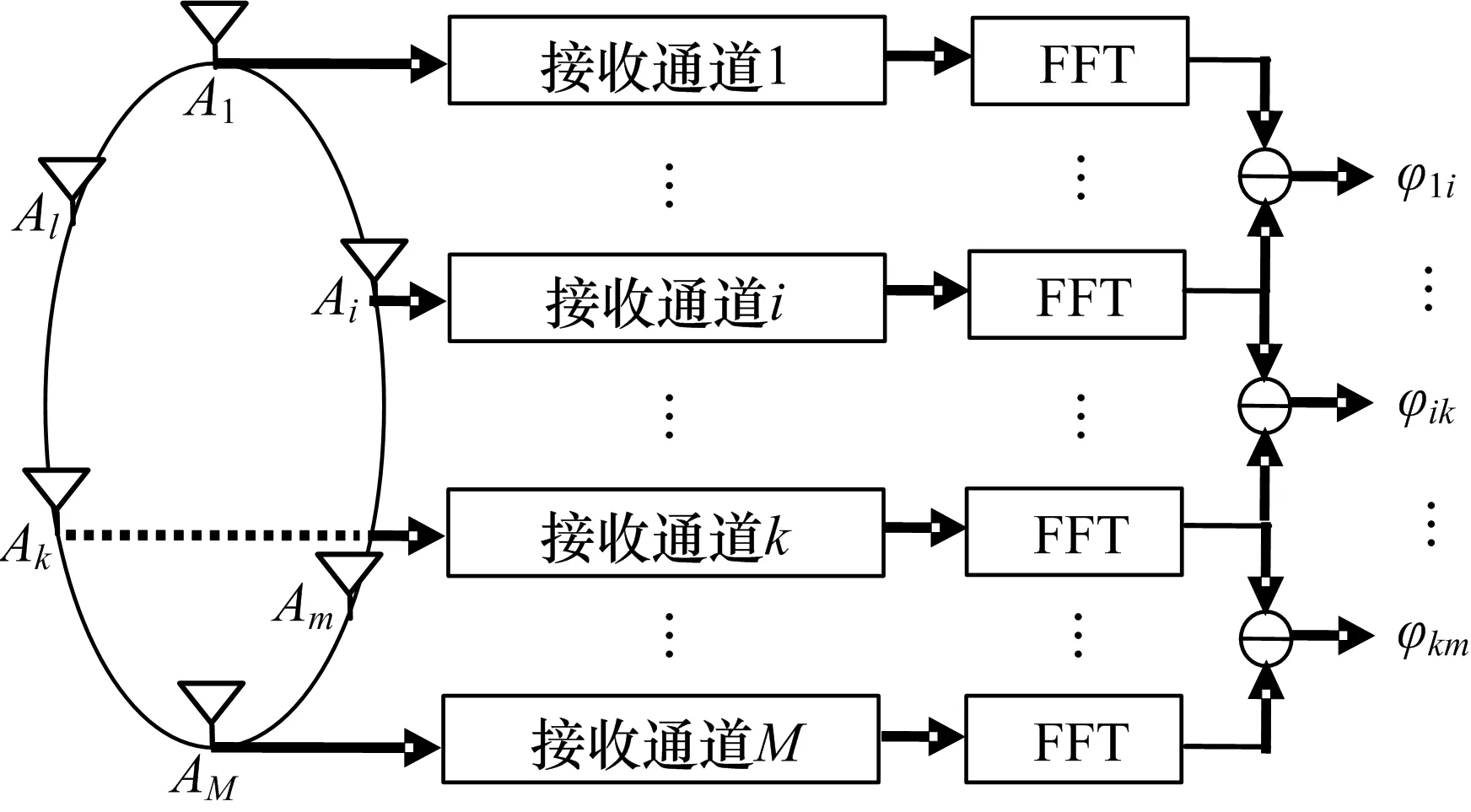
图2 多通道干涉仪示意图
由于各天线和接收通道相互独立,因此接收信号处理后得到的初相位之间可认为近似独立的:
E(ξiξk)=0,i,k=1,2,…,M,i≠k
(9)

在此条件下,相位差为:
φik=ψi-ψk+δikmod2π
(10)
式中,ψi和ψk为天线i和天线k对应的初相,δik=ξi-ξk对应基线的相位差测量误差。
由此可得相位差噪声特性为:
(11)
式中,l,m=1,2,…,M,l≠m。
本文将此条件下的相位差噪声模型称为相位差的相关噪声模型。
通过机械旋转[16]或电子切换[17]等方式形成时变基线维干涉仪进行测向,通常仅需要2个接收通道,对通道幅/相一致性要求和系统复杂度大为降低。如图3所示的双通道切换干涉仪,在观测时刻tn,通过M选2切换开关,选通2根天线构成干涉仪基线。由于测量的相位差是在不同观测时刻tn,利用不同接收信号在不同基线上得到的,因此测量误差之间可近似看作独立的。在此条件下,相位差为:
φn=ψn1-ψn2+δnmod2π
(12)
式中,ψn1和ψn2为天线1和天线2在观测时刻tn对应的初相,ξn1和ξn2为对应天线初相测量误差,δn=ξn1-ξn2对应基线的相位差测量误差。
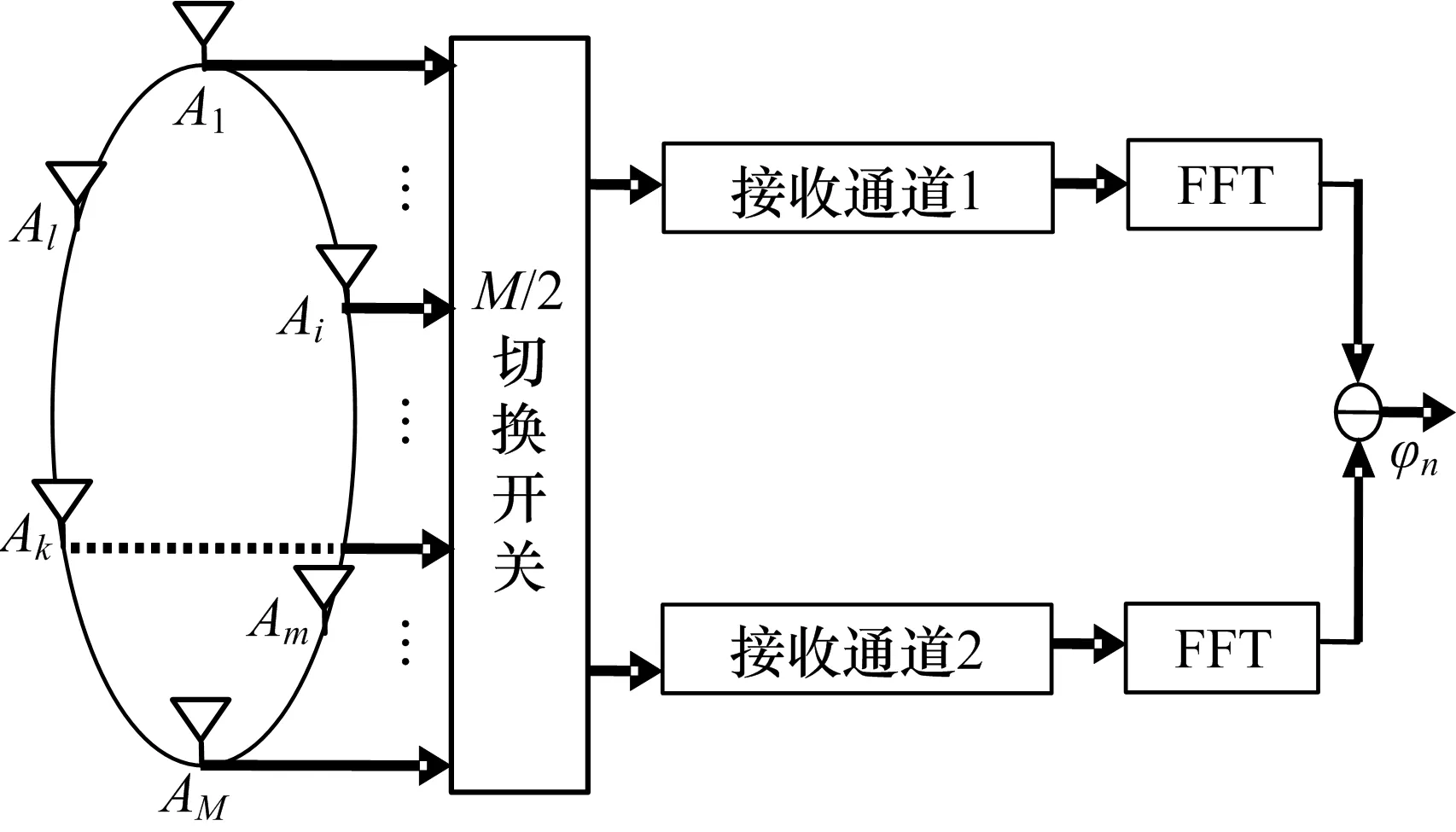
图3 双通道切换干涉仪示意图
由此可得相位差噪声特性为:
(13)
式中,c=1,2,…,N。
本文将此条件下的相位差噪声模型称为相位差的独立噪声模型。
2 测向方法
Gθ≈Gθm+Pmθ-θm
(14)
式中,Jacobi矩阵Pm=∂Gθm/∂θm:
Pm=HJm
(15)
式中,H=[κb1,κb2,…,κbN]T,Jm为视线矢量xm关于θm的Jacobi矩阵:
(16)
同时利用初始值得到相位差预测值:
Θm=Gθm
(17)
从而得到相位差测量值和预测值之间的残差:
zm=Φ-Θmmod2π
(18)
利用最小二乘可得:
(19)
需要注意的是,在上述计算中,只有当初值在真值附近时,(18)式中的2π取模运算才能去掉。但由于无法事先获知这一先验信息,受文献[15]中利用干涉仪模糊相位差定位方法的启发,若能在观测空间内选取多个初值,对每个初值采用Taylor级数方法计算,只要有一个初值落在真值附近,通过选取最小代价函数即可确定方位和俯仰角估计值。此即本文提出的多假设Taylor级数(MHTS)测向方法的基本思路。
下面给出测向算法的主要流程:
Step1:确定辐射源来波方向初始值θm=[αm,βm]T,m=1,2,…,M。初始时刻令m=1。
Step2:利用(15)式计算相位差关于θm的Jacobi矩阵Pm。
Step3:利用(17)式计算相位差预测值Θm,利用(19)式计算测量值和预测值之间的残差zm。
Step6:计算估计值对应的检验量Cm:
(20)
Step7:判断m若等于M则转入Step8,否则令m=m+1,转入Step2继续处理剩余初始值。
Step8:将检验量C(m)最小值对应的估计值作为视线矢量的估计值:
(21)
3 初值选取方法
上述算法中,关键是如何获得角度初始值。针对二维干涉仪阵的特点,进行初始值选取。首先选择利用具有一定夹角(如90°)和一定基线波长比(如10~20之间或最长的几组基线中)的2个模糊相位差φi和φl,以及方位安装角θi和θl。
根据φi和φl对应的基线长度di和dl确定模糊相位差各自的取值范围k∈[-di/λ,di/λ],h∈[-dl/λ,dl/λ]。通过遍历模糊数k和h,根据相位差与来波方向的关系,计算得到初始值。
对每组模糊数k和h,由φi和φl以及对应的方位安装角θi和θl,计算无模糊相位差和系数矩阵:

(22)
(23)
根据最小二乘可得:
(24)
若‖xkh‖大于1,不能构成单位视线矢量,因此舍去该组模糊数对应的初值。否则计算得到对应的方位和俯仰角的初始值:
(25)
(26)
由此可获得M≤(2di/λ+1)(2dl/λ+1)组方位和俯仰角初值。该初始化方法可推广到一维测向初值的选取。
4 仿真分析
通过计算机仿真,对不同干涉仪阵型以及一维和二维测向场景下,对本文测向方法性能进行验证。为评估测向性能,采用Monte Carlo重复试验统计定位误差。仿真中,定义方位角和俯仰角的均方根(RMS)误差为:
(27)
(28)

场景条件如下:一维测向中假设辐射源来波的方位角30°,信号频率3GHz。二维测向场景中,假设辐射源来波的俯仰角32°,其余参数与一维测向场景中相同。本文测向算法最大迭代次数为3。

独立噪声模型下,两个接收通道通过9选2电子切换开关在不同切换时刻接收辐射源信号,在每组基线停留时间为1ms。相关噪声模型下,9个天线连接9个接收通道。各个通道测量得到初始相位,进而得到各组基线相位差。
仿真分析不同算法的二维测向性能。采用文献[10]中聚类测向方法,仿真中采用了夹角为4π/9的4组最长基线用于聚类,其余基线用于解模糊,并将各组基线中与聚类结果最接近的角度取均值作为估计值。采用文献[12]中的PSO方法用于相关干涉仪测向,利用本文方法中的代价函数进行,其中方位角搜索范围为[-π,π],俯仰角搜索范围为[0,π/2],粒子数量与本文方法初始点数量相同,最大迭代步数为400,惯性权重ω由0.9递减到0.6,学习率c1和c2均为2.1。
仿真图例中,Clstr表示聚类方法仿真结果; PSO表示PSO相关干涉仪方法仿真结果;MHTS表示本文算法仿真结果;CRLB表示测向误差克拉美-罗下限,计算方法可参见文献[18];MSE表示测向理论均方误差。仿真中,测向估计值与真值的误差大于5倍理论误差则判定为测向模糊。
1)仿真一:独立噪声模型下二维测向
图4给出相位差独立噪声模型下,测量误差3°~40°范围内,不同算法的二维测向解模糊概率。
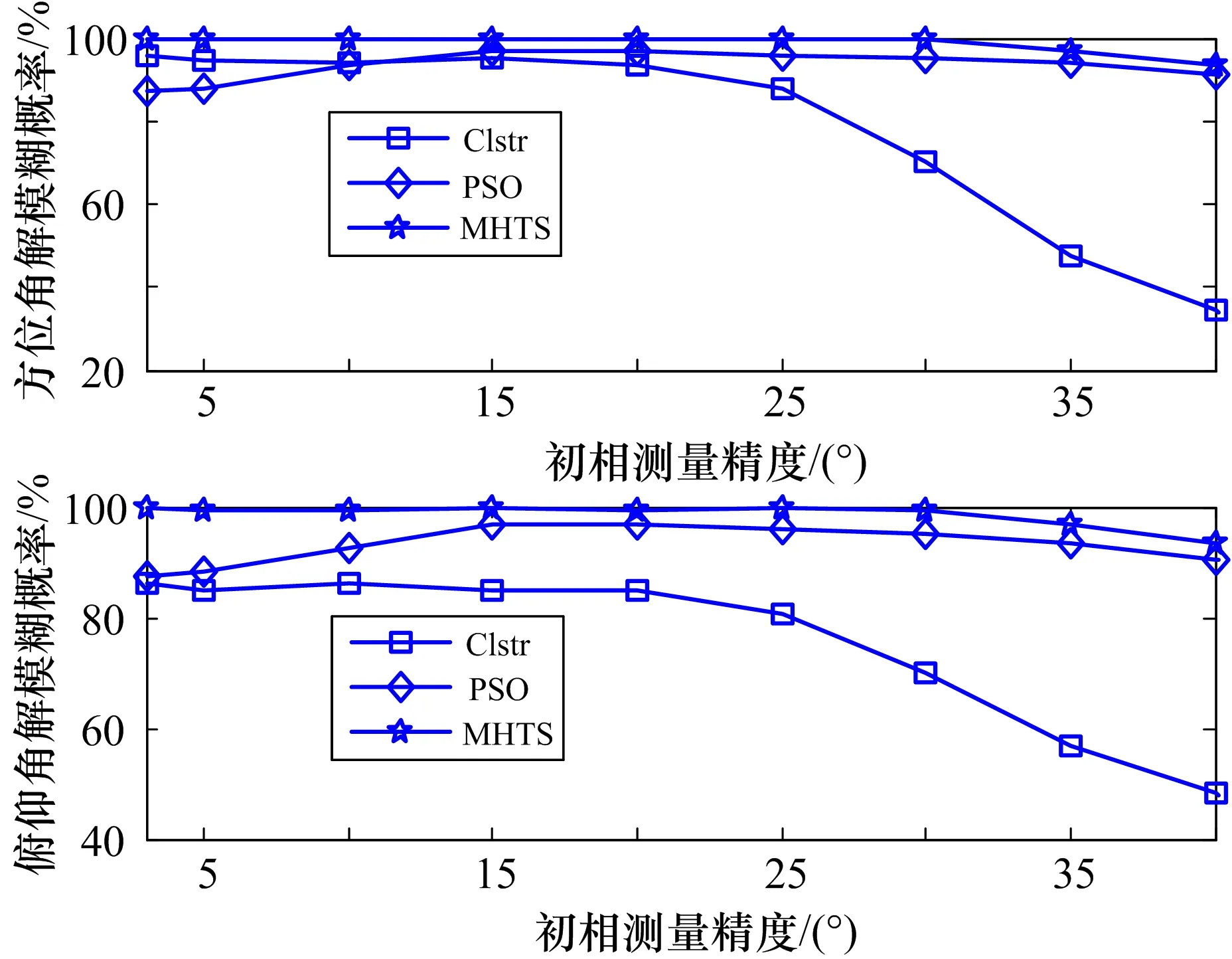
图4 独立噪声下不同算法二维测向解模糊概率
从图4可以看出,PSO方法由于随机搜索引起的个别局部极值,因此在相位差误差3°~30°范围内,解模糊概率不能达到100%。聚类方法本质上与相关方法相同,虽使用了多组基线,但仍未有效地使用所有基线。相位差误差3°~40°条件下,本文的测向方法解模糊概率优于聚类法和PSO方法。
图5给出相位差独立噪声模型下,测量误差3°~40°范围内,不同算法的二维测向精度。需要说明的是,图5和后文中的图7给出的统计误差,是剔除野值后得到的RMS误差。
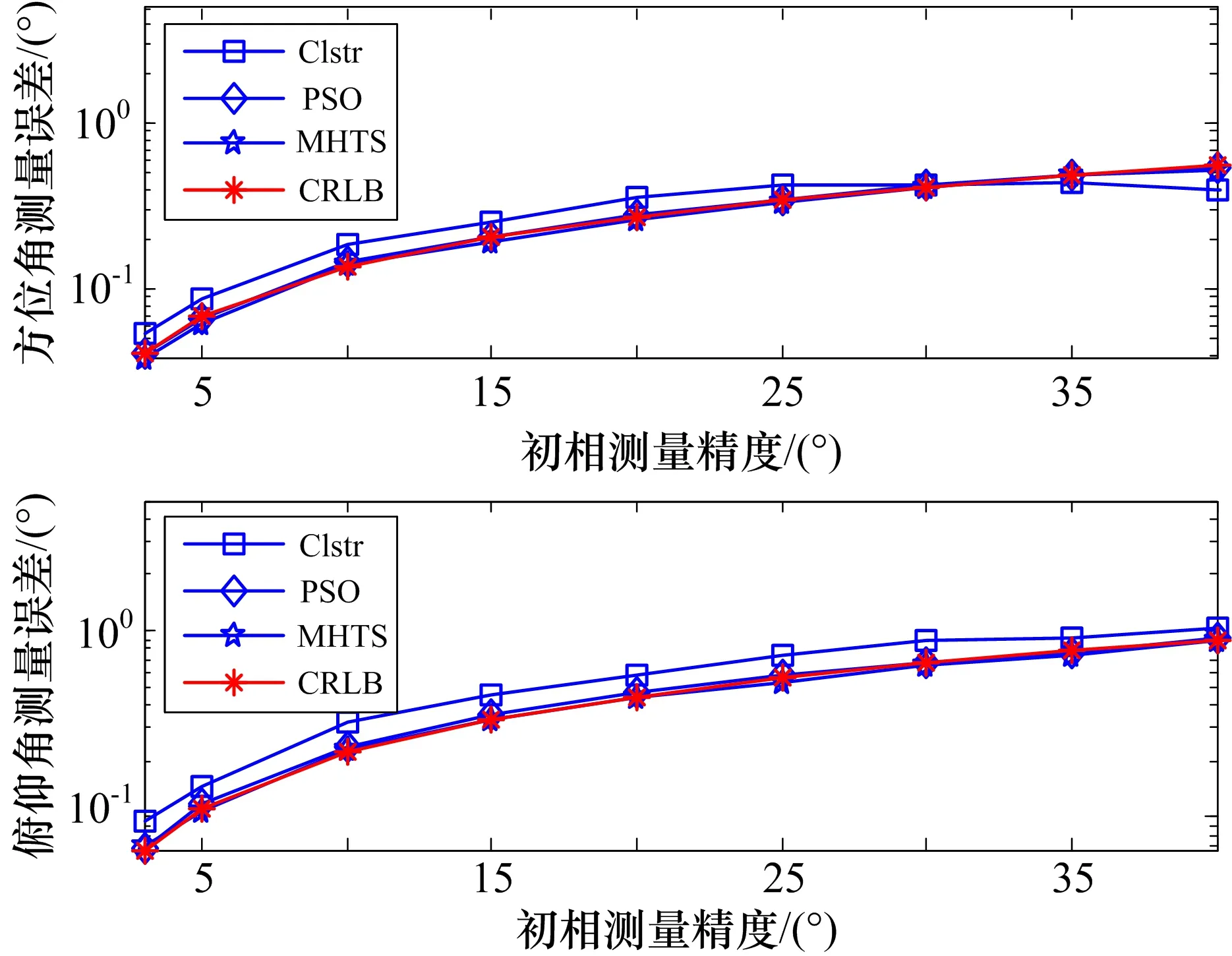
图5 独立噪声下不同算法二维测向性能
表1给出了二维测向方法仿真运算时间。
表1二维测向算法运行时间比较ms
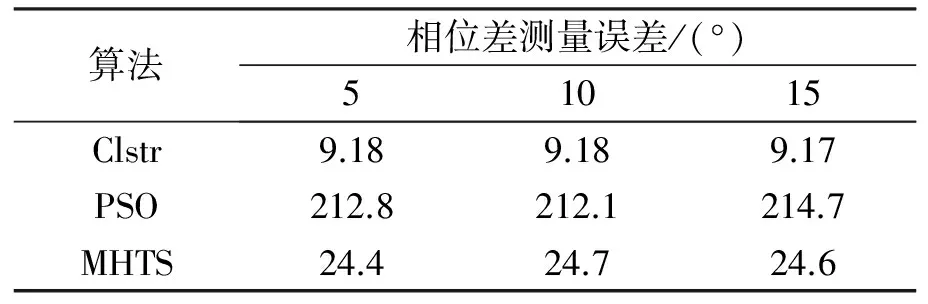
算法相位差测量误差/(°)51015Clstr9.189.189.17PSO212.8212.1214.7MHTS24.424.724.6
计算机操作系统为Microsoft Windows XP,硬件配置为Intel®CoreTMi5 CPU 750@2.67GHz , 2.66GHz,内存3.24GB,使用Matlab®软件进行计算。
从表1和图5中可以看出, PSO方法运算时间高于其它方法一个数量级。聚类方法运算时间虽然优于本文方法,但未有效地使用所有基线,因此测向性能不能达到CRLB。本文方法在相位差误差3°~40°之间,方位角和俯仰角测量精度都可到达CRLB。
2)仿真二:相关噪声模型下二维测向
图6给出相位差相关噪声模型下,测量误差3°~30°范围内,不同方法的二维测向解模糊性能。
图7给出相位差相关噪声模型下,测量误差3°~30°范围内,不同方法的二维测向精度。
从图7可以看出,在相关噪声模型下,在剔除野值后,聚类方法和本文方法的测向精度相当,且都可接近理论测向精度;PSO方法在初相测向误差较小时,测向误差略大于理论误差。然而从图6可以看出, PSO方法仍然由于随机搜索引起的个别局部极值,导致解模糊概率不能达到100%;而本文方法的解模糊概率优于其它两种方法。
5 结束语
本文提出的一种适用于任意平面阵干涉仪的多假设Taylor级数(MHTS)测向方法,直接利用模糊相位差进行测向,无需事先解相位差模糊,对二维干涉仪几何构型无特殊要求。该方法利用相位差所包含的角度信息作为初值,采用Taylor级数方法进行计算,运算量适中。理论分析和数字仿真表明本文方法测向精度可接近理论测向精度。■
[1] Rong Yang, Pek Hui Foo, Boon Poh Ng, et al. RF emitter geolocation using amplitude comparison with auto-calibrated relative antenna gains [J]. IEEE Trans. on Aerospace and Electronic System, 2011, 47 (3): 2098-2110.
[2] Schmidt R. Multiple emitter location and signal parameter estimation[J]. IEEE Trans. on Antennas and Propagation, 1986, 34(3):276-280.
[3] Macphie RH, Tae Ho Yoon. On using the compound interferometer to obtain the power pattern of a conventional receiving array[J]. IEEE Trans. on Antennas and Propagation, 2009, 10(57):3356-3359.
[4] Ching-Sung Shieh, Chin-Teng Lin. Direction of arrival estimation based on phase differences using neural fuzzy network [J]. IEEE Trans. on Antennas and Propagation, 2000, 48(7): 1115-1124.
[5] Jacobs E,Ralston EW. Ambiguity resolution in interferometry [J]. IEEE Trans. on Aerospace and Electronic System, 1981, 17 (6): 766-780.
[6] 周亚强,皇甫堪. 噪扰条件下数字式多基线相位干涉仪解模糊问题[J].通信学报,2005,26 (8) :16-21.
[7] 曲志昱, 司锡才. 基于虚拟基线的宽带被动导引头测向方法[J]. 弹箭与制导学报,2007,27(4):92-95.
[8] 宋才水, 顾尔顺. 无模糊长基线干涉仪测角的设计[J]. 现代防御技术,2006,34(2):52-54.
[9] 张亮, 徐振海,熊子源,等. 基于圆阵干涉仪的被动导引头宽带测向方法[J]. 系统工程与电子技术,2012,34(3):462-466.
[10] 张春杰, 李智东. 非均匀圆阵天线模型解模糊误差研究[J]. 系统工程与电子技术,2012,34(8): 1525-1529.
[11] Wei Hewen, Shi Yunguang. Performance analysis and comparison of correlative interferometers for direction finding [C]∥Proc. of the IEEE International Conference on Digital Object Identifier, 2010:393-396.
[12] Frans Van de Bergh. A new convergent particle swarm optimizer[C]∥IEEE International Conference on Systems, Man and Cybernetics, 2002:96-101.
[13] 翟庆伟. 最小二乘法测向技术研究[J].无线电工程,2008,38(3):55-57.
[14] Cheng Yongqiang, Wang Xuezhi, Caelli T. Tracking and localizing moving targets in the presence of phase measurement ambiguities[J]. IEEE Trans. on Signal Processing, 2011, 59(8): 3514-3525.
[15] 李腾,郭福成,姜文利. 基于旋转干涉仪模糊相位差的多假设NLS定位算法[J].电子与信息学报,2012,34(4): 956-962.
[16] Kawase S. Radio interferometer for geosynchronous satellite direction finding[J]. IEEE Trans. on Aerospace and Electronic System, 2007, 43 (2):443-449.
[17] Wu Wei,Cooper CC, Goodman NA. Switched-element direction finding [J]. IEEE Trans. on Aerospace and Electronic System, 2009, 45(3): 1209-1217.
[18] Kay SM. Fundamentals of statistical signal processing, estimation theory [M]. Englewood Cliffs, New Jersey: Prentice Hall, 1993:30-36.
猜你喜欢
九江学院学报(自然科学版)(2022年2期)2022-07-02 02:34:06
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:02
高技术通讯(2021年3期)2021-06-09 06:57:46
科学(2020年5期)2020-11-26 08:19:14
应用数学(2020年2期)2020-06-24 06:02:40
计测技术(2020年6期)2020-06-09 03:27:14
航天电子对抗(2019年4期)2019-06-02 08:22:40
制导与引信(2017年3期)2017-11-02 05:16:58
舰船电子对抗(2016年5期)2016-12-13 08:41:14
电测与仪表(2015年18期)2015-04-12 00:45:28