一种威胁雷达信号告警方法
2018-03-24 01:38:41沈家煌黄建冲
航天电子对抗 2018年1期
沈家煌,黄建冲
(电子工程学院,安徽 合肥 230037)
0 引言
现代战场环境中单位时间内出现的脉冲信号平均数少则数万,多则数百万,在如此密集的信号流中快速准确地筛选识别出具有威胁力或重点关注的雷达辐射源信号,能够为部署防御工作和采取对抗措施赢得宝贵的时间,提高己方在复杂战场中的生存能力。因此,研究复杂环境下对威胁雷达快速正确地告警具有重大意义。
随着雷达信号识别领域的深入研究,许多新的识别方法不断出现。文献[1]研究了一种基于模板脉冲序列的雷达辐射源识别方法,该方法在识别处理过程中,不需要完成预处理和特征提取的步骤,加快了识别速度。文献[2]研究了一种基于集对分析和滑窗技术的雷达辐射源快速识别技术。文献[3]提出了基于脉冲样本图TOA差级算法的重点辐射源快速识别方法,其对脉冲流的每个脉冲都需要计算多个TOA差级,使得计算量增加。本文针对威胁雷达信号识别中需匹配脉冲次数多、影响识别速度、计算量大等问题,提出了一种基于脉冲序列检测识别的威胁雷达信号告警方法。
1 雷达信号PRI的数学模型
1.1 重频固定和重频抖动
重频固定雷达信号是指脉冲重复频率为一非时变的常数的雷达信号,即:
PRIi=C,∀i=1,2,……
(1)
重频抖动雷达信号的PRI值在真实值的一定范围内的随机抖动,其数学模型为:
PRIn=PRI0+δ
(2)
式中,PRI0为雷达信号PRI的中心值或平均值;δ一般为在-T,T内均匀分布的随机序列,T为抖动范围。
1.2 重频参差
重频参差雷达信号具有多个脉冲重复频率,其PRI按一定的规律进行变化。对于具有m个重复频率的雷达:
PRIi=PRIk,k=imodm
(3)
式中,m为周期参差数;PRIk(1≤k≤m) 为m个确定的PRI常数。以m个脉冲为一周期,各PRI值循环变化一次。
1.3 重频滑变
重频滑变雷达信号的PRI单调地增加或减少,其到达一个极值点时快速返回到另一个极值,变化是连续的,滑变的模式往往是周期的。其PRI模型为:
(4)
式中,PRIr为PRI初始值,maxδn为调制幅度,σn为相邻脉冲PRI的变化增量。PRI变化范围为PRIr,PRIr+maxδn或PRIr-maxδn,PRIr。
1.4 重频正弦调制
重频正弦调制信号的PRI值在有限的范围内近似正弦变化,其脉冲到达时间可表示为:
TOAn=TOAn-1+PRI0+Asin(2πv·PRI0·
n+φ)+ωn
(5)
式中,PRI0为PRI均值;A为调制幅度;v为调制速度;φ为初始相位。PRI变化范围为PRI0-A,PRI0+A。
1.5 重频分组
重频分组脉冲调制又称重频脉组捷变,重频分组脉冲调制雷达信号脉冲序列由多个常规PRI构成,每个PRI值持续一定的时间段后自动、快速地切换到下一个PRI值,通常使用小于100~125μs的脉冲重复间隔在几个值之间进行转换[5]。
2 脉冲序列快速检测方法
2.1 标准脉冲序列检测法
接收机截获的高密度混合脉冲流,可以以任意脉冲作为基准脉冲,采用任意长度的PRI作为参照去检测,这使得快速检测识别出威胁雷达信号成为可能。由于雷达脉冲信号序列存在脉冲丢失的现象,因此需要设置一个丢失脉冲比例的检测门限。当预计在某处应该检测到某种PRI的雷达信号脉冲,却未检测到,即发生脉冲丢失时,若丢失脉冲比例未超过检测门限则继续检测,反之则认为在现有的脉冲流中不存在这种PRI的雷达信号。脉冲丢失比例的设置应根据不同脉冲信号而变化,故脉冲丢失比例定义为:
θ=D/N
(6)
式中,θ为丢失脉冲比例;D为丢失脉冲数;N为脉冲序列中该信号的总周期数。
设各待识别威胁雷达信号的重复周期为PRI1,PRI2,PRI3,…,PRIn,其中最长重复周期不超过PRImax(记为Pm),将标准检测法定义为以单个PRI为检测步长的检测方法,如图1所示。
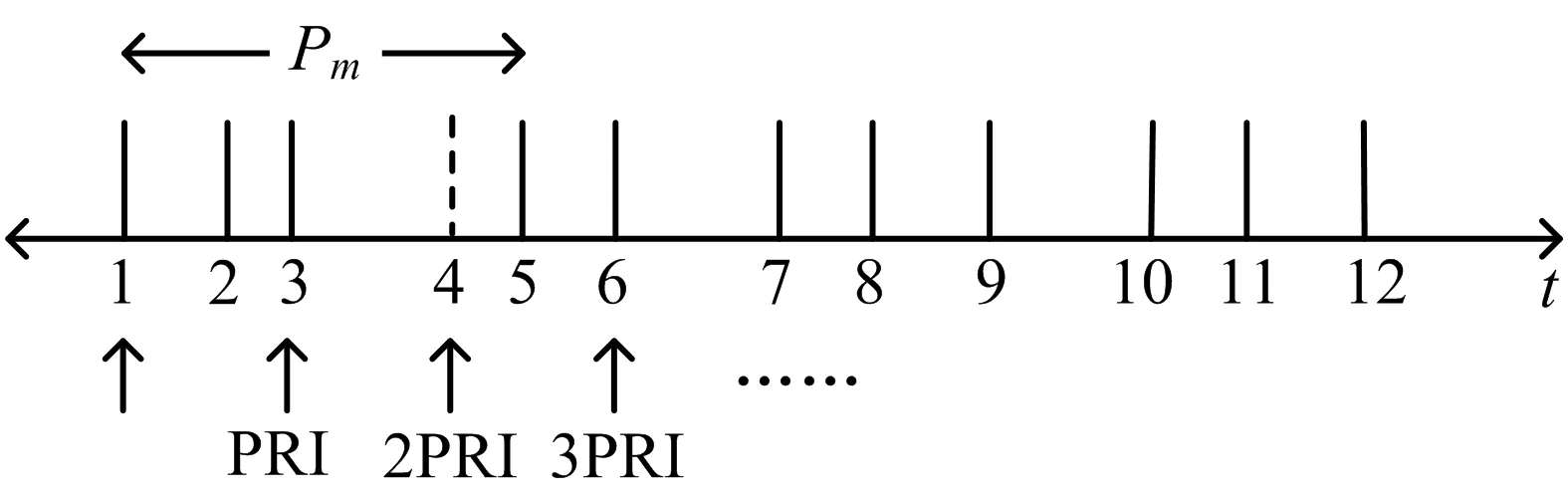
图1 标准脉冲序列检测示意图
搜索混合脉冲序列中的威胁雷达信号步骤如下:
1)以1为基准脉冲,以PRIi为步长检测是否存在以PRIi为周期的某雷达信号,若存在则告警。在实际环境中存在脉冲丢失情况,如“4”脉冲,如果脉冲丢失比例小于门限值,则继续进行检测,反之则认为混合序列中无该雷达信号,退出该信号检测。当存在脉冲交叠时,选择误差最小的脉冲作为信号在该位置的脉冲或对脉冲采用脉内参数做进一步匹配。最后判断是否检测出所有威胁雷达信号,若不是则转步骤2)。
2)以“2”为基准脉冲,分别以未被检测出的威胁雷达信号的PRI对混合脉冲序列进行检测,判断其是否存在于混合脉冲序列中。
3)以此类推,直到以“Pm”长度中最后一个脉冲为基准脉冲进行检测后,若仍存在未被检测出的威胁雷达信号,则认为在混合脉冲序列中不存在该信号。
2.2 变步长检测法
标准检测法的检测步长不够灵活多变,如果针对某种威胁雷达信号,假设在观测的时间段内有105个PRI,当检测完105个PRI后再判定是否存在该威胁雷达信号,最后进行告警,这样势必造成计算量大、花费时间长的问题。因此,本文提出一种变步长检测法,它是在标准检测法基础上采用变化的步长进行检测的方法。
变步长检测法原理[4]:假设某威胁雷达信号的PRI在观测时间内重复105次,我们只需要检测其中的一部分,例如只检测150个预定出现该信号的脉冲的位置,看是否存在该信号。设丢失脉冲比例为θ,在这150次检测中,只要丢失脉冲数量不超过150θ,就认为周期为PRI的该威胁雷达信号存在。即在105个PRI中只选择某些点进行检测,而不是每次都以一个PRI为步长进行检测,如图2所示。

图2 变步长检测示意图
用标准法检测时需检测所有PRI点,而用变步长法检测时只检测图2中1、3、6、10等号数的脉冲,检测步长则是1~3、3~6、6~10等长度。如果依次检测一定数量的PRI,如105个PRI的前700个,从虚警和漏警的角度上分析,固定步长只检测前一段的结果和变步长法的结果是相同的。但变步长检测法改变了检测步长,仅选取某些点进行检测,能够避免PRI跳变信号被误检测为“周期性信号”。在检测某威胁雷达信号时,我们也可以先用变步长检测法进行粗略地检测该种雷达信号是否存在,如果检测结果为存在,那么可以检测更多个点,其实质是在满足漏警的要求上降低虚警的概率。
2.3 倍步长检测法
倍步长检测法指检测步长成倍数增长,采用倍步长检测法检测威胁雷达信号,能够大幅节省时间。例如,分别检测1PRI,2PRI,4PRI,8PRI,16PRI……,看是否存在该种雷达信号的脉冲。参照文献[5]计算方法可知这样检测16个点,该信号脉冲序列长度就达到了216。如果观测时间内的序列更长,可以更多倍地变步长进行检测,如1PRI,4PRI,16PRI,64PRI……。当检测点过少以致影响精确度时,可多插入一些检测点。
在信号检测识别过程中,检测步长应根据目标威胁雷达信号的特征进行选取。例如对于PRI固定的信号应该选取较大的步长,从而加快识别速度;而对于PRI正弦变化或者长重复周期的雷达信号,不能选取过大的步长,从而避免在观测时间内无法准确地检测信号或因检测点过少造成漏警。
上述的步长检测法具有先密后疏的检测优点,即开始时检测点取得密些,以便于在一开始就检测不到信号情况下及时退出,避免浪费检测时间和加大计算量。从以上分析可知,本文的威胁雷达信号快速检测识别法较一般的序列检测法的检测速度是成数量级地提高。对于存在脉冲丢失的情况,也采用脉冲丢失比例的检测门限处理。
3 威胁雷达信号识别告警
3.1 PRI固定威胁雷达信号识别
在进行信号检测前对混合脉冲序列进行预分选,是为了提高后续的信号检测准确度和降低虚警概率。PRI固定的雷达信号是一种常规雷达信号,与复杂调制信号相比,其结构相对简单,识别系统也较为简单。如果用标准检测法对PRI固定雷达信号进行检测,会增大不必要的计算量并影响信号的检测识别速度。因此,可采用变步长检测法或倍步长检测法检测。PRI抖动雷达信号的PRI值在真实值的一定范围内的随机抖动,故可看作单周期变化雷达信号。与PRI固定的雷达信号同理,可采用变步长检测法对其进行检测。但是由于PRI抖动雷达信号的PRI抖动量在±1%~±10%内,所以容差的设定是识别抖动信号的关键因素之一。单部PRI固定雷达信号检测流程如图3所示。
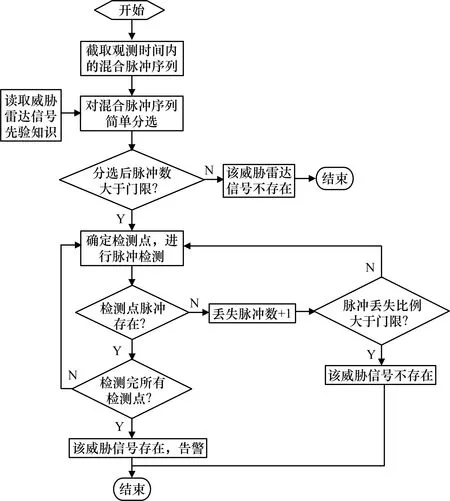
图3 单个PRI固定威胁雷达信号检测流程图
3.2 PRI参差威胁雷达信号识别
从文章前部分论述可知,PRI参差雷达信号是大周期重复的雷达信号。因此,可将其看作是几种周期性雷达信号在不同起始位置的叠加组合,单个雷达信号的重复间隔为PRI=PRI1+PRI2+PRI3。
图4为某三参差雷达信号分解方法,设信号序列的第一个大重复周期内的PRI1,PRI2,PRI3的脉冲位置分别为P1、P2、P3,由于检测时只考虑到达时间,故可表示为:
(7)
由此可得出,脉冲1、4、7、10、13、16……构成一种单周期脉冲信号;2、5、8、11、14……构成一种单周期脉冲信号;3、6、9、12、15……构成一种单周期脉冲信号。因此,对参差雷达信号检测时,先将其进行分解,然后对分解后的信号检测,最后综合判断参差信号是否存在。
从以上论述可知,对参差信号检测流程为先对分解后的各个单周期信号进行检测,然后根据信号组合还原结果综合判定参差信号是否存在,最后进行告警。同理,由于PRI滑变雷达信号、PRI正弦调制雷达信号都为大周期上重复的信号,也可将其分解成多个单周期信号,所以也可以用这种方法检测。从文章前部分论述可知,重频分组雷达信号的每个PRIi值都会持续一定时间,从而重频分组雷达信号的脉冲以所有的PRIi值持续时间和为大重复周期。因此,本文的信号检测的方法对重频分组雷达信号也是有效的。但是对大重复周期内脉冲数较多,PRI调制较复杂的信号检测较为繁琐,这是下一步研究的方向。

图4 三参差信号分解法
4 仿真分析
在实际环境下,需要告警的威胁雷达信号往往是多个的,为加快信号检测速度,本文采用的多个信号同时检测的检测结构。仿真实验接收混合信号包含六部雷达信号,分别为1部PRI固定雷达信号,PRI值为150μs;1部PRI抖动雷达信号(抖动量δ=10%),其中心值PRI0=240μs;1部三参差雷达信号,子周期分别为PRI1=410μs,PRI2=460μs,PRI3=490μs;1部滑变信号,PRI滑变范围为390~1010μs;1部正弦调制信号,PRI调制均值PRI0=200μs;1部PRI脉组捷变雷达信号,其PRI∈30μs,60μs,详细信息见表1。
为研究实际环境中噪声对威胁雷达信号检测的影响,分别在噪声引起参数测量误差值为0.1%、1%、5%的环境下仿真,并计算在每种噪声环境下对6种信号的检测准确度,结果如表2所示。为客观验证,将本文告警方法与文献[3]中重点雷达信号识别方法的结果对比,其中检测准确度为检测出的脉冲数和检测点数的比值。
由表2可看出,随着雷达信号参数测量误差的增大,脉冲丢失数量增加,检测结果的准确度也有所下降;雷达信号检测识别方法对结构越简单的雷达信号,检测识别效果越好;对组成威胁雷达信号的单周期信号个数越少,检测识别效果越好。

表1 威胁雷达信号信息表
表2 不同环境下雷达信号检测结果

序号脉冲个数检测点个数环境1环境2环境3脉冲丢失个数准确率%准确率%脉冲丢失个数准确率%准确率%脉冲丢失个数准确率%1700174010095.3994.8391.81790.232700174497.793.61193.6889.31889.6632100519010095.73593.2692.95888.82435008600100—6892.10—11986.165700016970100—18888.92—25884.806420010290100—8791.55—15385.16
图5、6、7分别为环境1、环境2、环境3中信号检测点脉冲的到达时间(TOA)曲线。从图5可知,虽然参差、滑变、正弦调制、脉组捷变等PRI调制雷达信号的调制方式和组成信号的单周期数不同,但是它们的到达时间在误差较小时都集中分布一条直线上,因为组成威胁雷达信号的多个单周期信号的重复周期相同。将同一雷达信号在不同环境下的TOA曲线进行比较可知,信号参数误差越小,脉冲到达时间越集中在一条直线上,反之随脉冲到达时间越大越偏离直线,如图6、7出现了多条TOA曲线。另外,检测的脉冲的TOA集中在直线上,说明检测点的脉冲属于同一单周期信号的脉冲。结合仿真的信号检测结果和到达时间曲线图可看出,噪声引起的误差越大快速检测法的检测准确度也随之下降,组成信号的各个单周期信号的TOA曲线偏离角度越大。

图5 环境1中检测点脉冲的TOA曲线

图6 环境2中检测点脉冲的TOA曲线
5 结束语
本文首先给出了几种常用周期性雷达信号的PRI和TOA的数学模型,并对各个信号的特性进行分析。然后针对复杂电磁环境下威胁雷达告警问题,结合脉冲序列快速搜索算法,提出一种威胁雷达信号检测识别及告警的方法。从仿真分析可得,本文提出的威胁雷达信号快速检测识别法过程简单,在有噪声、信号种类多、数量未知、密度高的复杂环境下能够有效识别出混合信号中的威胁雷达信号。与传统的识别方法相比,本文检测识别法无需信号特征提取,避免了复杂的分选过程。由于采用变步长对某些点
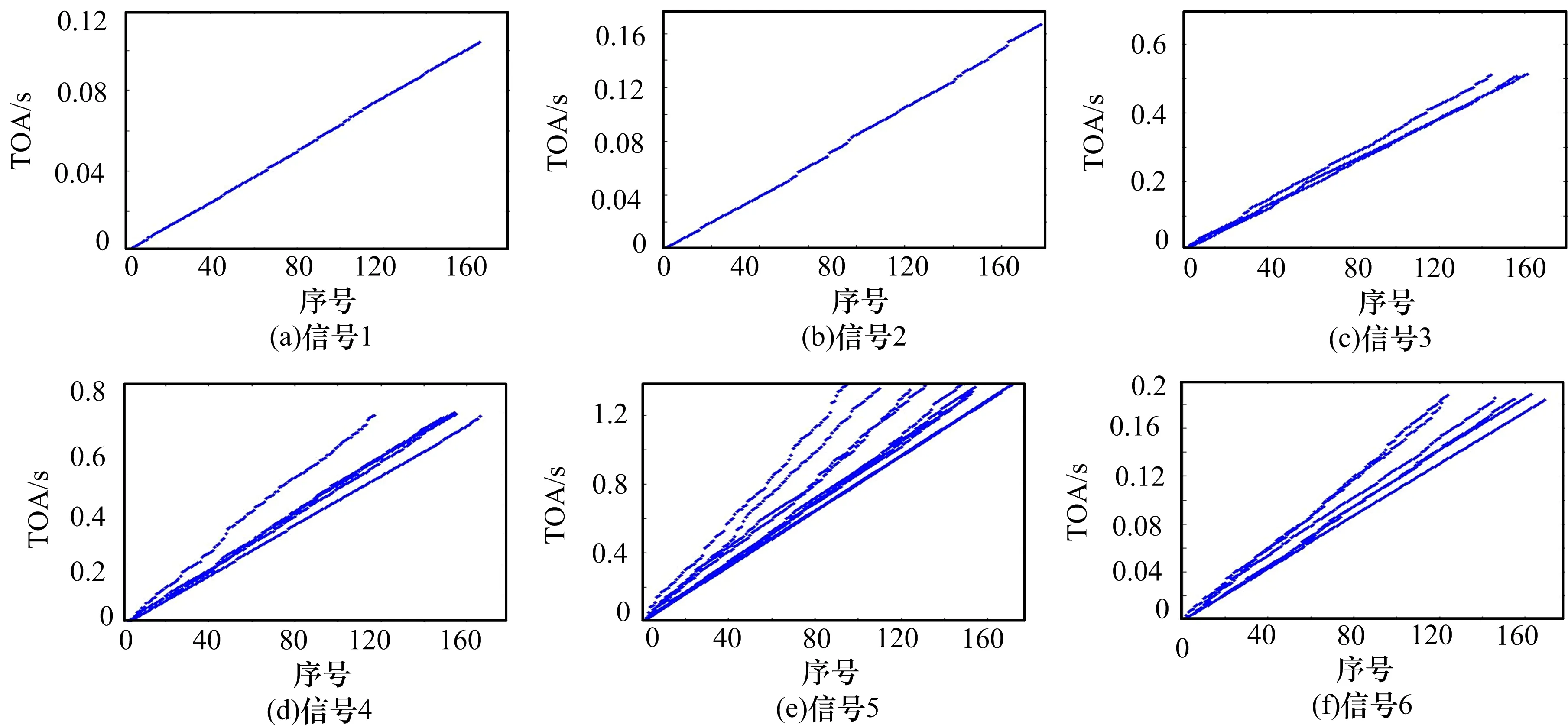
图7 环境3中检测点脉冲的TOA曲线
的脉冲进行检测,所以大大减少了信号检测识别过程的计算量,从而为在复杂战场中采取防御措施和组织攻击取得更多的时间,提高了在战场中的生存能力,可为研究威胁雷达信号告警系统提供参考。■
[1] 龚亮亮,罗景青,吴世龙.一种基于模板脉冲序列的雷达辐射源识别方法[J].现代防御技术,2008,36(5):131-134.
[2] 刘凯,王杰贵.基于SPA和滑窗技术的重点雷达辐射源快速识别[J].现代防御技术,2014,42(2):150-166.
[3] 张鹏程,王杰贵,旷平昌,等.重点雷达辐射源快速筛选识别算法分析[J].火力与指挥控制,2015,40(11):31-35.
[4] 赵仁健,熊平,陈元亨.脉冲序列的快速搜索法及可信度分析[J].信号处理,1996,12(2):140-162.
[5] 何明浩.雷达对抗信息处理[M].北京:清华大学出版社,2010,5.
猜你喜欢
现代苏州(2022年9期)2022-05-26 01:34:49
文萃报·周五版(2022年9期)2022-03-11 00:24:12
航天电子对抗(2021年2期)2021-05-31 02:00:32
新世纪智能(高一语文)(2020年12期)2020-06-01 08:14:20
中国眼镜科技杂志(2017年13期)2017-08-16 03:13:54
中国眼镜科技杂志(2017年13期)2017-08-16 03:13:02
计算机测量与控制(2017年6期)2017-07-01 16:23:28
电子学报(2016年12期)2017-01-10 07:15:25
中国交通信息化(2015年12期)2015-06-06 06:53:33
读者·校园版(2015年8期)2015-05-14 13:11:41