基于数字信息素的分布式决策技术
2018-03-24 01:38梅颖慧朱伟强
航天电子对抗 2018年1期
钟 鸣,梅颖慧,宁 勇,田 达,朱伟强,苏 抗
(1.中国航天科工集团8511研究所,江苏 南京 210007; 2.空军驻江苏地区军事代表室,江苏 南京 210006)
0 引言
近年来,以人工智能为代表的多项科学技术获得巨大进展。为了赢得未来战争,各国都积极在军事领域验证、应用新技术,力图形成新的作战理念,通过颠覆传统作战模式来获得战场优势。随着计算机、控制领域相关技术的日益成熟,各种无人武器装备不断被研发出来,并逐渐参与战斗,替代作战人员执行危险、难度较大的任务。无人武器装备由最初的单机、高集成的遥控武器系统向网络化、分布式、高智能的系统演进。近来提出的无人集群系统可在未来战争中执行多种重要的战略战术任务,如:实施分布式电子战,掩护战机/导弹突防[1];进行大范围部署,对来袭入侵行为预警[2];通过任务协同,对敌实施精确攻击[3]。根据无人平台组成网络实施集群作战的需求,需要研究适用于高对抗环境的大规模集群作战的网络架构、基于大规模集群的高效信息交互以及集群任务决策等相关技术。通过突破关键技术,可研制具有高效通联能力、智能化的集群任务系统,该系统中各任务节点可迅速形成任务公式,通过协同形成“合力”,以较低代价更好地完成任务,进而推动集群能力,使之初步具有取代单机系统的潜力。
1 国内外研究现状
美国国防部长办公室发布的《无人机系统路线图(2005—2030)》中指出,2025年后,无人集群将具备战场态势感知和认知能力,能够完全自主和自行组织作战。近年来,美军通过项目、计划和作战概念驱动,针对无人集群进行了大量的相关研究、实验和演示验证。DARPA主导实施的“小精灵”项目,把具备自主协同和分布式作战能力、可回收的小型无人机组成蜂群,执行情报监视侦察、压制防空系统、电子战、网络战并执行攻击任务。蜂群项目一直致力于减小造价高昂的多用途有人控制平台在强对抗战场环境下承担的风险,同时降低作战使用成本,提高战术使用的灵活性。“小精灵”项目使用的无人机平台为通用原子公司研制,每架约320kg,由大型运输机或者其他大中型无人机搭载发射。美国国防部战略能力办公室(SCO)为无人蜂群战术研发了“灰山鹑”微型无人机,该无人机依据商用标准,采用3D打印部件组装,适合快速制造,成本低廉,一次性使用,可由战斗机搭载和发射。该项目中,无人机集群可由F-16战斗机发射(每架战斗机携带20架无人机),无人机可在空中自行编组,并自主协同作战。根据公开情报显示,SCO已于2016年10月在加州中国湖试验场成功完成了一次大规模的蜂群演示,共投放了103架无人机,这群小无人机通过共享一个分布式“大脑”,演示了集体决策,自修正和自适应编队飞行。美国空军研究实验室(AFRL)实施的“编群战术空间”计划,研究了无人机之间的协同作战,包括侦察、搜索与跟踪,电子战、心理战、对地攻击和战术牵制等方面。此外AFRL在“协同空域作战”概念中,提出了有人机指挥无人机集群,协同执行目标识别、战场态势评估、跨平台联合制导等复杂任务。美国海军研究局(ONR)开展了“低成本无人机蜂群技术”(LOCUST)项目,完成了40s内在海上连续发射30架无人机以及无人机群的编组和机动飞行试验,最终要达到每秒1架发射上百架小型无人机,组成集群执行巡飞、情报、吸引火力、电子干扰等任务。该项目使用的“弹簧刀”无人机由雷声公司研制,每架成本仅为1万美元,质量为6kg,一次性使用,可携带多种有效载荷。此外,该项目组将会组建包括无人潜航器、无人水面艇以及反水类无人机组成的小型舰队继续验证无人集群技术。
针对陆地战场,以地面无人系统为主体的集群作战已经走上战场并初露锋芒,2016年1月19日,俄军在叙利亚首次使用战斗机器人参加作战行动,在支持叙利亚军队攻占位于拉塔基亚郊区的战斗中,2种型号共10部机器人(6部平台-M多用途战斗机器人和4部阿尔戈火力支援机器人)以及3架无人机和“仙女座-D”自动化指挥系统联合作战,以较少的代价取得一定战果,体现出地面无人机集群的作战威力。在海上战场,对无人艇和无人潜航器为主的集群研究也方兴未艾。2014年,美国海军研究局进行了无人艇关于“蜂群思维”的试验,13艘无人艇将各自传感器获得的数据进行共享并达成“一致作战”。2016年美国海军研究局进行了“蜂群2”项目试验。在这次试验中,由充气艇、RHIB和其他小型无人船组成的水面无人集群自主执行巡逻任务,操作人员仅在远处进行任务级指挥监控而不是直接遥控每条无人船。该项目旨在利用无人艇巡逻大面积开放水域,当未知船舶进入监控区域后,集群中最接近的节点迅速接近目标船只进行抵近侦察,快速判断其是无害船只还是潜在威胁,如果判断为可疑目标,集群会自主安排一艘无人艇进行跟踪。2016年10月5日美国海军研究实验室宣布,海军在无人系统集群作战方面已经取得突破性进展,所研发的无人系统集群作战技术将利用多艘无人艇的协同合作,保护己方舰艇、港口,并对抗敌方威胁。同时,美国海军正在寻求建立一支由无人潜航器构成的水下无人舰队实施反水雷和水下攻击作战。
近年来国内科研单位在无人机集群方面也展开了研究。其中,电科院联合清华大学以及泊松技术先后实现了67、119架规模的固定翼无人机集群组网飞行的原理验证试验,打破了美国海军保持的103架固定翼无人机集群的记录,该无人机集群预期应用于侦察监视、电子干扰、打击与评估等方面。2016年底,航天空气动力技术研究院基于CH-4B无人机系统,对五站四机高密度协同、超视距飞行、超视距卫星通信接力、多路卫通同传、多机态势检测和协同飞行等集群作战任务进行了验证。
2 集群网络的任务体系架构
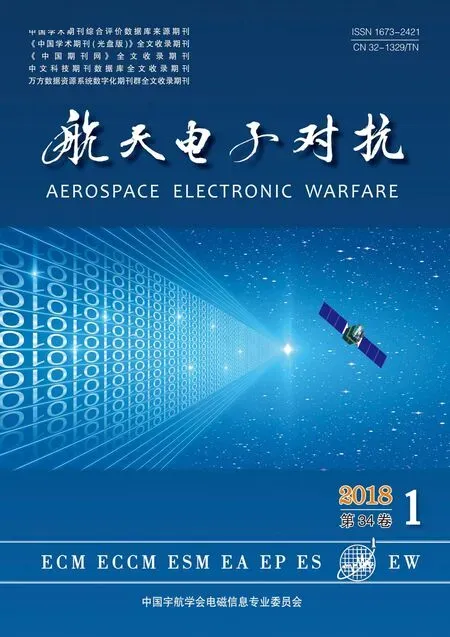
为适应作战需求,同时兼顾扩展性、安全性和信息共享效率,集群网络是由任务型节点和中继型节点组成的混合网络。其中任务型节点又可划分为传感器型节点、融合处理型节点和攻击型节点等子类型。集群网络采用分层结构,由中继节点组成中继网络作为混合网络一层,节点之间采用网状拓扑相互连接;任务型节点组成任务网络作为混合的第二层,节点之间同样可采用网状拓扑相互连接;中继型节点与任务型节点之间采用树状拓扑相互连接,即每个中继型节点负责对部分任务型节点的共享信息以及请求信息进行转发,而每个任务型节点都“从属”于一个中继型节点,但任务型节点可以自主转换自己的中继节点,因此能够保证信息共享的鲁棒性。在集群网络的任务体系中,虽然存在中继型节点,但它只是用来提高态势共享的效率,并不是固定、集中式的管理调度节点,因此集群系统仍然具备较强的鲁棒性。在复杂电磁环境下,任意一个节点被干扰或者击落后,都将不会影响其他节点执行任务,也不会影响集群系统的运行。同时,分层混合的网络架构能够保证良好的网络扩展性,即新的任务型节点通过向某个中继型节点发送入网信息,并由中继型节点确认广播给其他节点后,就可快速加入网络。需要指出的是,不同于Ad hoc网络,集群网络两层可通过物理或者逻辑划分,主要目的是将低速、可要性要求高的控制/共享/请求信息与高速的业务数据分开传输。例如任务型节点需要与其他节点进行协同时,可发送协同请求信息至中继网络,并由中继节点广播给所辖任务节点。此外,任务型节点可根据网络中其他节点的状态信息,来选择业务数据路由。在网络安全方面,中继型节点可对需要入网的任务节点进行身份认证并周期性地对所辖任务型节点进行确认,如果没有通过安全认证则不转发其发送的任何消息并广播该节点为恶意节点,以提高网络的安全性。集群网络混合分层结构如图1所示。
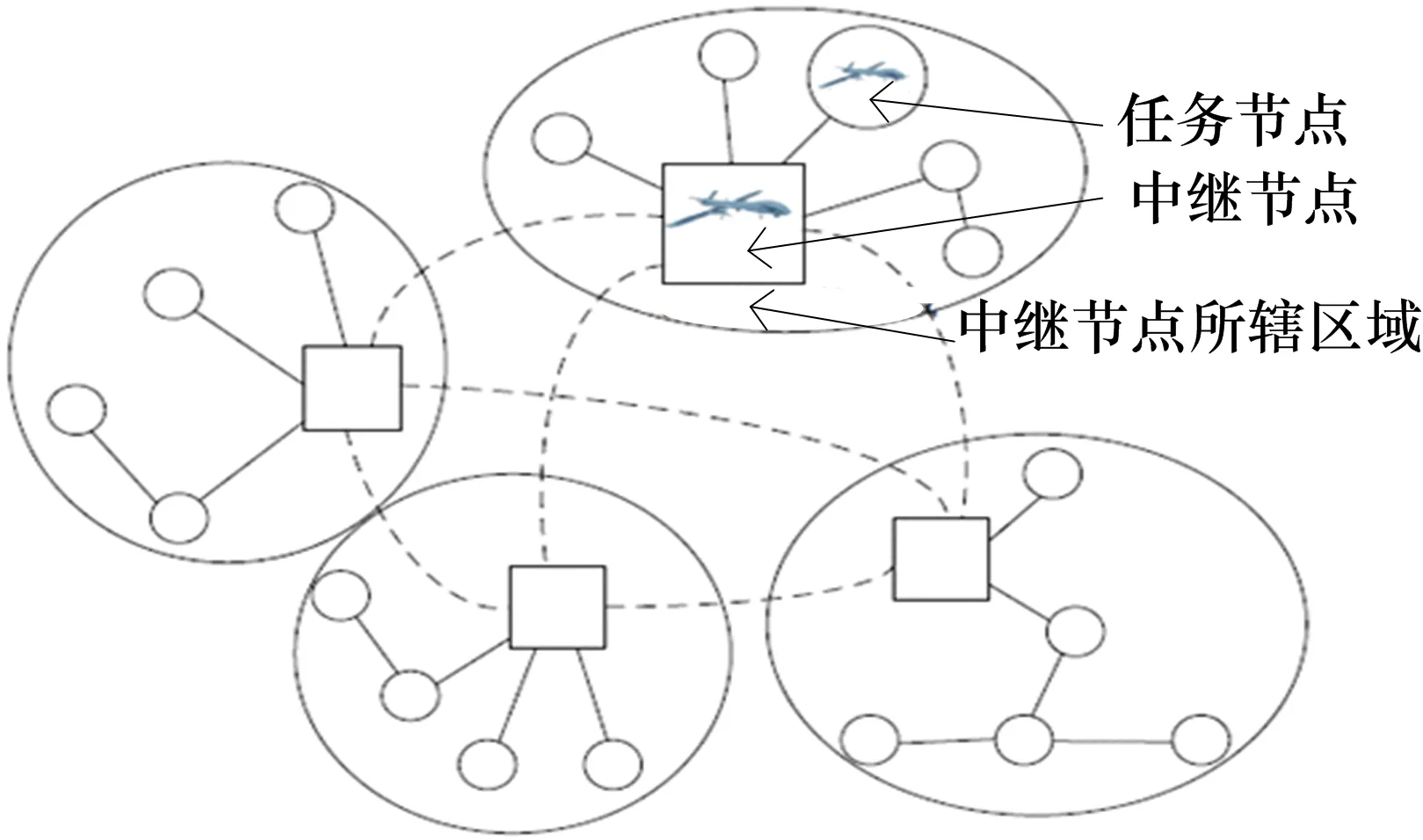
图1 集群网络混合分层结构
3 基于数字信息素的信息交互机制
3.1 蜂群信息交互与任务机制
随着人工智能技术的发展,各种生物学领域的概念越来越被人们所熟知。就生物集群而言,集群思维被描述成动物群体自组织行为,例如蜜蜂对蜜源的找寻与选择以及鸟群、鱼群在迁徙过程中以编队形式飞行。这些自然界给予生物群体的分工协作能力令人叹为观止,而群体内部信息传递共享机制对实现无人集群高智能等级的自主任务决策与规划有借鉴意义。
当一些生物群体具有庞大的数量时,它们仍然能够完成复杂的群体协作,这种集体行为并非依靠外部统一的协调调度,而是依靠一整套信息共享和信息协同机制。以蜂群采蜜为例,在采蜜过程中不同角色的工蜂需要相互协作才能高效地工作。采蜜开始时,一部分工蜂分散寻找蜜源。一旦找到蜜源后,它们分泌被称为信息素的化学物质[4-5],这种物质在一定时间内能散布到一定范围,但会随着时间逐渐消散。在寻找蜜源的过程中,任何工蜂都可以释放表示找到蜜的信息素来通知其他未找到蜜源的工蜂。远处沿途感知到该气味的工蜂会沿着信息素浓度变化,向蜜源分布的区域聚集。也就是说,蜜蜂可以释放信息素来寻求其他蜜蜂协同采蜜。不同蜜蜂个体通过释放相同气味加强某种信息累积,而通过气味浓度来表征的信息的累积程度又代表了属于某个蜜源的采蜜工作的繁忙程度。最为重要的是,信息素不但能够召唤任务协同,并且能根据信息累积程度调配蜂群资源。它既随任务召唤蜂群,又不会使蜜蜂无休止地聚集而引发混乱。信息素的调节能力需要具备以下因素:1) 具有沉淀累积性,可表征;2) 可借助个体交互快速传播;3) 具有多种类型,可通过统计获得较为准确的态势结果;4) 具有一定的时效性,是可变的。
在蜂群找到多个蜜源时,没有找到蜜源的工蜂能够通过获得的信息素来自主调整采蜜策略。当一个正在寻找蜜源的蜜蜂收到代表不同蜜源的信息素后,如果其中某信息素浓度过高,此蜜蜂将放弃这个蜜源转而选择其他蜜源。蜂群利用信息素种类及浓度这只看不见的“手”智能地、自主地、自适应地进行决策,完成不同区域蜂群之间的协同和蜂群内不同角色群体的资源分配。从效果来看,虽然去哪个蜜源采蜜,对于每个蜜蜂的选择完全是自主的,但是由于目标规则都是明确的,因此整个群体体现出高度的智能化和任务决策理性。
3.2 集群态势共享与任务机制
蜂群将信息素用于任务分配和协同交流,该机制具有任务决策鲁棒性强、规则简单、能分解复杂任务等优势。由于无人集群与蜂群在执行任务过程中的组织形式与分工需求有一定的契合度,因此将该机制引入无人集群信息交互具有实际意义。通过模拟蜂群信息素传播机理与信息共享机制,通过少量协同信息,依靠具有自主任务决策能力的个体,使集群在复杂电磁环境下高效执行作战任务。将无人集群与蜂群进行类比,结果如表1所示。
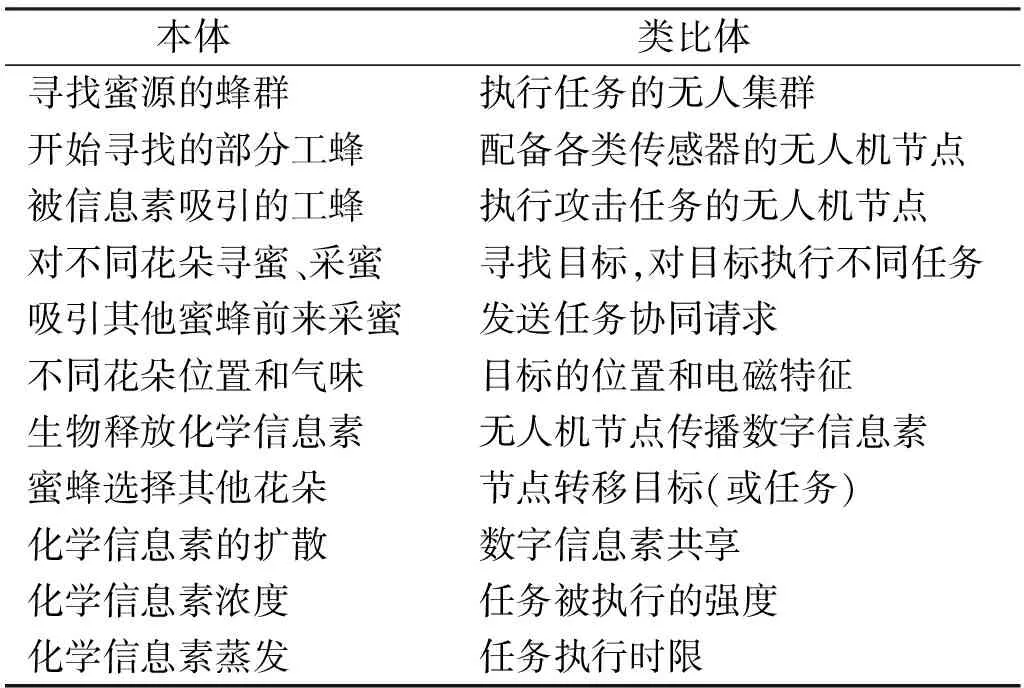
表1 蜂群和无人集群类比
根据集群网络的信息传递方式,传感器型节点将感知获得的态势信息,按照信息素消息格式形成共享信息单元。中继型节点负责搜集传感器型节点发送的态势信息,并生成信息池单元,通过中继网络传播各自的信息池单元,使得其他节点快速获得其他区域的态势,在全网范围内形共享信息池,并由中继型节点将处理后的共享信息池消息发送至附近的任务型节点。态势信息收集以及传播流程如图2所示。
图2 态势信息共享流程示意图
集群节点状态和态势共享消息可指导各节点完成任务分工和协同。为更好地收集和利用共享信息,每个任务型节点基于TDMA体制按照统一消息格式周期性发送信息素信息、接收信息池信息。每个中继型节点收集整理并维护信息池。完整的共享消息传播周期如图3所示。
4 分布式自主决策技术
为克服集中式在线决策带来的弊端,采用分布式在线自主决策模型。当任务型节点接收信息池消息后,可获得目标特征信息。在自主决策过程中,节点综合三方面要素生成决策集,即由信息池消息所提取的代表某个任务进行程度的信息素浓度、任务本身的重要性程度以及节点自身能力,并最终发布决策信息素eq t来通知自身决策。任意节点在第t个周期内提取信息池信息素sij浓度更新可用公式(1)表示。
c(t)=c(t-1)+∑q∈Q(q)(rq(t)-vq(t))
(1)
式中,rq(t)代表更新周期内目标任务增量,vq(t)代表已过失效的目标任务量,Q(q)表示发布相同信息素任务节点集合。
在进行在线决策前,根据效益函数模型,对目标和任务进行筛选,以确定任务执行的候选范围。而信息素浓度是形成效益函数目标任务的主要因素。假设任务的信息素浓度上限设置为cmax,下限为cmin。在节点进行决策时,如果发现当前目标任务的浓度高于上限cmax,认为针对该目标的该任务已经饱和,因此选择不参与该任务也不回应协同消息,转而选择决策其他目标任务。

图3 共享消息格式
为防止大量节点同时涌入一个目标任务造成短时间内过饱和,在计算信息素浓度时,任务节点根据sij的增量对选择该任务的其他节点决策进行预测,并通过Roulette Wheel(比例选择算子)以一定概率决策该任务。当目标任务的浓度低于下限cmin时,新加入的节点按照浓度由低到高优先执行相应的目标任务。
目标任务的一种效益函数由公式(2)定义。其中,D(t)代表任务型节点q对目标j执行任务i决策的权重。Pr(t)代表目标的任务等级,也就是执行该项任务的奖励激励,A(t)代表节点自身因素,包括执行该任务的成本预估和威胁评估,c(t)为信息素浓度,α、β、γ为3个关键因素的权重,它们具有一定关联性,并且可根据Pr(t)、A(t)和c(t)计算结果实时调整,初值可通过机器学习算法得到。
D(t)=αPr(t)-βA(t)-γc(t)
(2)
任务节点计算多个D(t)值,根据排序确定决策范围,形成决策集Dq。为防止决策结果过度集中,任务节点在Dq中随机选择目标执行任务,或者选择权值最高的目标根据协同需要采用不同方式执行该任务。同时,根据决策结果生成目标任务字zij(t),并添加执行任务时间vij(t),协同请求以及要求的消息字dij(t)。将上述字段形成决策信息素eij(t),按照图3的消息格式将信息素消息发送给中继型节点,在周期t+1发布到整个网络。
5 结束语
本文提出了一种基于数字信息素的分布式决策技术,针对无人集群任务需求,对满足群体任务运行、态势共享等功能的信息交互体系架构进行研究。并提出大规模、高可靠集群网络架构,高效集群信息交互机制及自主任务决策等技术,为大范围、多平台联合行动集群系统提供理论支撑。■
[1] 王秀锦,王强,杨帆.“海上狼群”分布式电子战系统构想[J]. 舰船电子对抗,2012,35(4): 8-10,18.
[2] 张振国,孙旭,孙文峰.无人机用于空军战略预警作战的可行性分析[J]. 现代雷达,2012,34(10): 7-10.
[3] 石玉彬.分布式干扰技术研究[D]. 西安:西安电子科技大学硕士学位论文,2013.
[4] 沈东,魏瑞轩,茹常剑.基于数字信息素的无人机集群搜索控制方法[J]. 系统工程与电子技术,2013,35(3):591-596.
[5] 曾志将,黄康.蜂群中化学信息通讯[J]. 蜜蜂杂志,2008, 28(4): 3-6.
猜你喜欢
纺织科学研究(2021年6期)2021-07-15
计算机应用与软件(2020年3期)2020-03-13
军事运筹与系统工程(2019年4期)2019-09-11
信息化建设(2019年2期)2019-03-27
学苑创造·C版(2018年7期)2018-08-08
科学与技术(2018年23期)2018-06-17
知识就是力量(2017年2期)2017-01-21
农村农业农民·B版(2015年3期)2015-04-13
意林·少年版(2014年13期)2014-08-27
意林(2013年17期)2013-05-14