主瓣干扰条件下双极化单脉冲角度估计方法
2018-03-24 01:38王建路戴幻尧
航天电子对抗 2018年1期
王建路,戴幻尧,周 波,许 雄
(1.电子信息系统复杂电磁环境效应国家重点实验室,河南 洛阳 471003;2.中国洛阳电子装备试验中心,河南 洛阳 471003)
0 引言
目前,单脉冲雷达对常规的主瓣干扰有几种对抗方法,但是对主瓣内复合干扰没有很好的抗干扰方法。现有的雷达对抗一般的主瓣干扰的措施有:1) 提高雷达发射功率[1],采取“烧穿模式”,使电子干扰在一定距离上失效。烧穿距离与目标的RCS的四次方根成比例,一般出现在离雷达很近的地方,这使得雷达长期工作于被干扰的状态。2) 提高雷达的距离分辨力,采用100M以上的雷达的发射信号带宽,使雷达的距离高分辨力达到米级[2],试图从距离上对目标和干扰源进行分辨。这种方法对主瓣内干扰源是一个单点源干扰效果比较好,但是对主瓣复合干扰是没有用的。因为主瓣复合干扰在整个距离量程内都覆盖了目标回波,而不是仅仅在目标所在距离单元覆盖目标回波,所以即使提高了分辨力,其它分辨单元的干扰信号依然存在,从而无法在距离上分辨目标和干扰;3) 提高雷达角度分辨力[3-5],采用空间谱估计技术,使雷达角度分辨力达到波束宽度的1/N,在角度上对目标和干扰源进行分辨。然而实际上空间谱估计算法对信噪比要求很高,运算量非常大,工程上很难实现,复合干扰中的噪声干扰成分后会抬高雷达接收机噪声水平,降低信噪比,使得空间谱估计技术的性能大幅度降低。4) 直接运用极化滤波手段,分别对和通道、差通道进行极化滤波抑制干扰信号, 再将滤波后的信号进行单脉冲测角处理[6-7]。但是由于滤波后剩余干扰信号的存在,使得角度量测值总是存在一定的偏差,另外,滤波有可能会降低信噪比,对后续的检测带来消极影响。
本文提出的双极化单脉冲雷达的目标角度估计方法,是对抗主瓣干扰的一种简单而有效、且非常易于工程实现的方法。
1 主瓣复合干扰特性
单脉冲雷达测角已是一种相对成熟的技术并广泛应用于高精度的跟踪雷达系统中。然而,当雷达主波束内同时存在角度相近且不同的目标和噪声压制干扰源时,目标回波在时域和频域被具有一定带宽的干扰所淹没,常规的信号处理后,单脉冲雷达无法有效检测目标,或错误地检测、跟踪干扰源,单脉冲测角的输出为物理空间目标和干扰的加权平均,无法给出正确的角度指示,进而破坏雷达角度跟踪系统。这种主瓣干扰不仅具有时频域压制的干扰效果,也具有角度欺骗的干扰效果,称为主瓣复合干扰。例如,有源雷达诱饵干扰(TRAD)通常比真实目标回波信号的幅度要大很多,在空间上和目标保持一定的距离关系,在雷达主波束范围内目标和诱饵干扰不可分辨,诱饵转发噪声压制干扰或密集假目标干扰,极大地破坏了单脉冲雷达对真实目标的测角及跟踪的精准度。
图1为主瓣复合干扰下单脉冲雷达和通道接收信号的时域分布、频域分布,此时干扰和目标信号功率比为15dB,由于干扰信号比目标信号大15dB,此时目标信号完全被压制了,目标信号在时域无法检测,干扰信号的频谱完全覆盖目标所在频率,此时目标信号完全被压制,目标信号在频域无法检测。
图2为主瓣复合干扰条件下常规单脉冲雷达目标角度估计结果。图(a)给出了目标和干扰所在的真实位置,目标的方位和俯仰角都是-1°,干扰的方位和俯仰角是1.5°,波束宽度是6°。图(b)给出了常规单脉冲处理在主瓣复合干扰下,干扰信号使得雷达测角产生很大误差,由于干扰信号功率比目标信号功率强20dB,此时常规单脉冲处理的测角输出大部分为干扰信号角度和目标信号的质心区域 ,所以测角输出的方位和俯仰角大约在0.5°~2°范围。
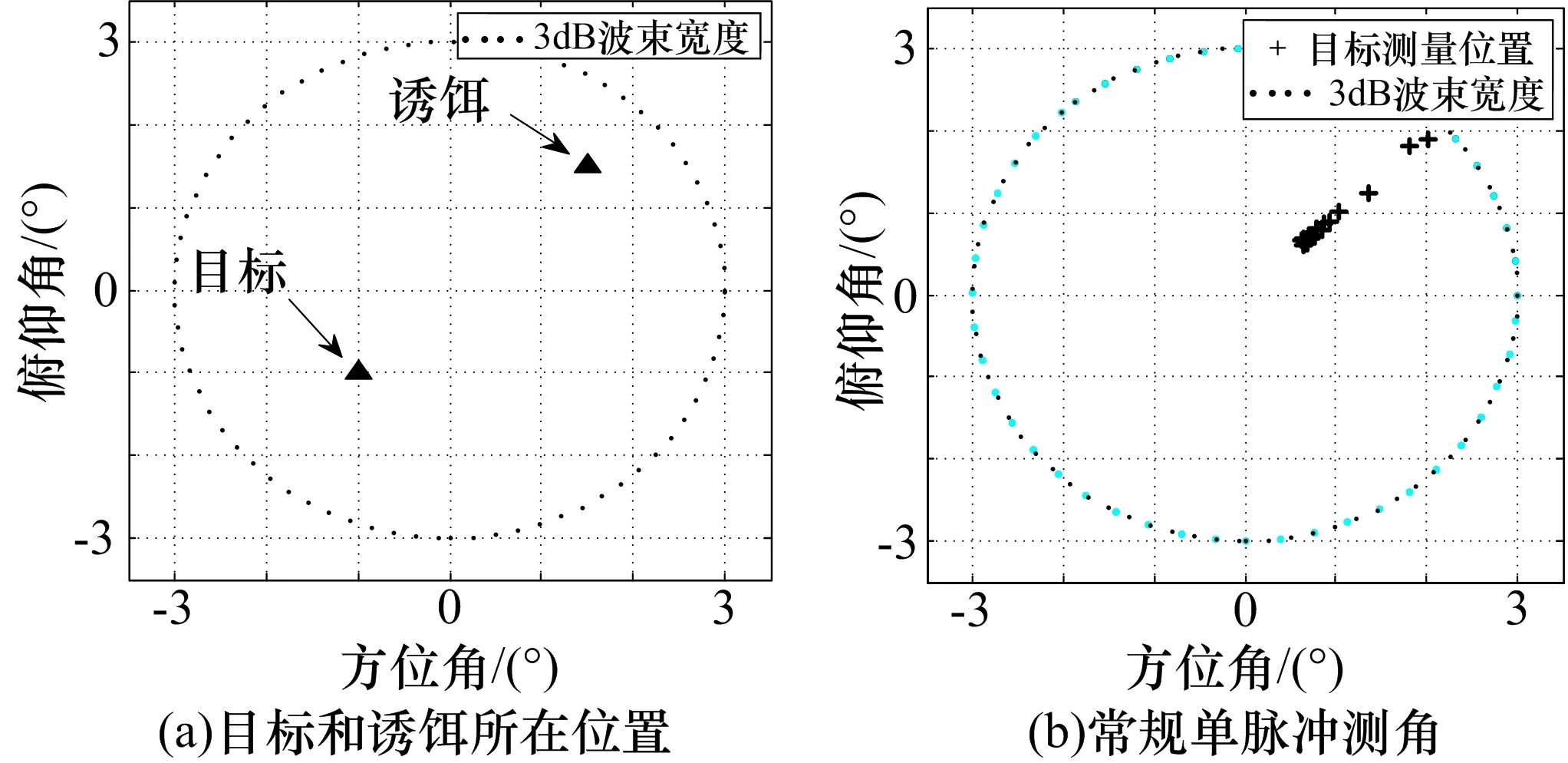
图2 为主瓣复合干扰条件下常规单脉冲雷达目标角度估计结果
2 双极化结构改进
将单脉冲雷达改为单极化发射,双极化接收工作方式。常规单脉冲雷达天线一般为垂直极化或者水平极化,发射和接收的信号均为单一的极化信号。实际中,目标回波和主瓣复合干扰信号既有垂直极化分量,又有水平极化分量。将雷达改为单极化发射、双极化接收工作方式,能够同时接收回波信号的水平极化分量和垂直极化分量。
单脉冲雷达的天线一般具有A、B、C、D四个象限构成,四个象限的接收信号进行线性组合,构成了和信号、方位差信号、俯仰差信号,利用这些信号进行目标角度测量。常规单脉冲雷达天线是单一极化的,只能获得单一极化分量的信号。本文提出将单脉冲雷达天线由单极化改造为双极化,如图3所示。因此,极化改造后天线四个象限的每一路输出都是双极化的,包括水平极化和垂直极化2路。每个象限有2路输出,四个象限就有8路输出信号,如图4所示。
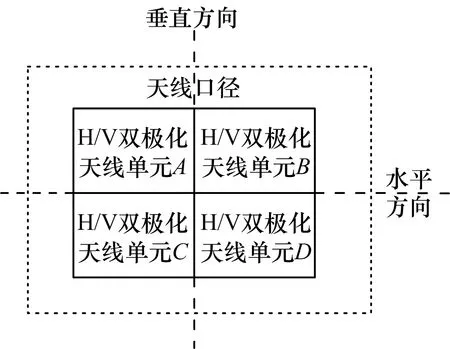
图3 改进后的双极化单脉冲雷达天线四象限构成示意图
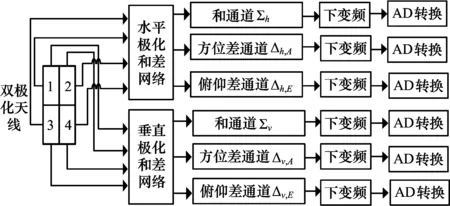
图4 改进后的双极化单脉冲雷达接收机系统组成结构图
A路的垂直极化输出Av,水平极化输出Ah;
B路的垂直极化输出Bv,水平极化输出Bh;
C路的垂直极化输出Cv,水平极化输出Ch;
D路的垂直极化输出Dv,水平极化输出Dh。
将四个象限的8路输出信号进行线性组合,可以构成6路信号,包括:水平极化的和信号∑h、水平极化的方位差信号Δh,A、水平极化的俯仰差信号Δh,E,垂直极化的和信号∑v、垂直极化的方位差信号Δv,A、垂直极化的俯仰差信号Δv,E。下角标v表示垂直极化,h表示水平极化,A表示方位角,E表示俯仰角。
这6路和、差信号和A、B、C、D四象限的8路输出信号的关系,可以表示为:
∑v=Av+Bv+Cv+Dv
∑h=Ah+Bh+Ch+Dh
Δv,A=(Av+Cv)-(Bv+Dv)
Δv,E=(Av+Bv)-(Cv+Dv)
Σh,A=(Ah+Ch)-(Bh+Dh)
Δh,E=(Ah+Bh)-(Ch+Dh)
3 极化解耦步骤和实验
图5给出了主瓣复合干扰下双极化单脉冲雷达目标角度测量流程图。根据2个和差网络输出的水平极化和通道信号与垂直极化和信号,计算出复合干扰信号的极化比与极化滤波矢量,对2路和通道进行极化滤波预处理,滤波后干扰信号会受到显著抑制,大幅度改善信干比,如图6所示。根据输出数据找到目标和干扰混叠的所在的距离/速度分辨单元,确定该单元后,对6路信号的距离/速度分辨单元采用双极化解耦角估计方法,估计出目标的方位和俯仰角。
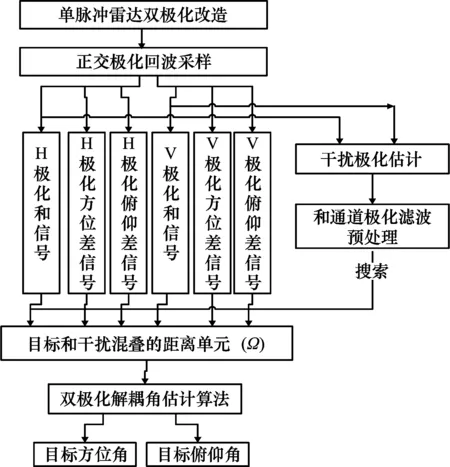
图5 主瓣复合干扰下双极化单脉冲雷达目标角度测量流程图
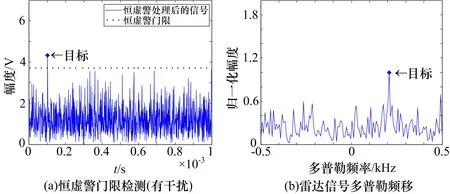
图6 和通道极化滤波预处理后,目标/干扰混叠单元的检测结果
算法步骤如下:
步骤一:将单脉冲雷达改为单极化发射,双极化接收工作方式;
步骤二:根据和通道的输出信号,计算出复合干扰信号的极化比;
步骤三:和通道极化滤波预处理,提高信号干扰功率比,搜索目标和干扰混叠的距离/速度分辨单元;
步骤四:采用双极化解耦角估计方法。
图7为主瓣复合干扰条件下双极化单脉冲雷达目标角度估计结果。此时干扰信号功率比ISR为20dB,射频通道自身信噪比SNR为20dB,利用本文提出的新方法,可以在干扰条件下比较准确地估计出目标所在的角度。
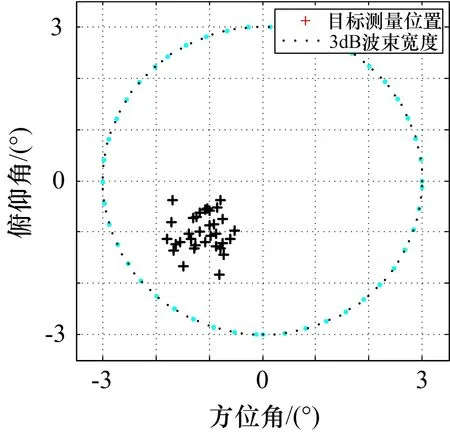
图7 干扰条件下双极化单脉冲雷达目标角度估计结果
4 结束语
本文设计了一种双极化单脉冲雷达的目标角度估计方法,将雷达接收天线改为双极化接收,并增加相应的和差网络,在数字域形成6路处理通道,通过估计干扰的极化特性,消除干扰信号对目标角度的耦合误差,估计出目标的真实角度,维持单脉冲雷达正常的测角和跟踪,为对抗主瓣复合干扰提供了一种简单而有效,且非常易于工程实现的方法。■
[1] 王满玉,程柏林.雷达抗干扰技术[M].北京:国防工业出版社,2016.
[2] 陈行勇,刘永详,黎湘.步进频率信号相位对消合成运动目标距离像[J].电子与信息学报,2017,29(4):815-818.
[3] 刘义, 赵志超, 王雪松,等. 反辐射导弹复合测角抗诱偏干扰方法[J]. 宇航学报,2009, 30(5): 2122-2127.
[4] 王永良, 陈晖, 彭应宁,等. 空间谱估计理论与算法[M]. 北京: 清华大学出版社, 2005.
[5] Cadzow JA. A high resolution direction-of-arrival algorithm for narrow-band coherent and incoherent sources[J]. IEEE Trans. on ASSP, 1988,36(7): 965-979.
[6] 李永祯,胡万秋,孙豆,等.一种基于极化信息的机载拖曳式诱饵存在性检测与抑制方法研究[J]. 雷达学报,2016,5(6):666-672.
[7] 马佳智,施龙飞,李永祯,等.主瓣干扰条件下混合极化系统单脉冲角度估计[J].系统工程与电子技术,2016,38(12):2692-2699.
猜你喜欢
计算技术与自动化(2022年2期)2022-07-04
现代财经-天津财经大学学报(2022年5期)2022-06-01
航天电子对抗(2022年2期)2022-05-24
北京航空航天大学学报(2021年9期)2021-11-02
海军航空大学学报(2021年1期)2021-09-01
火控雷达技术(2021年1期)2021-04-20
舰船电子工程(2020年3期)2020-06-11
现代防御技术(2019年5期)2019-10-28
舰船电子工程(2019年6期)2019-07-08
航天电子对抗(2019年4期)2019-06-02