
基于车联网图像的多焦点融合去噪技术的研究
2018-03-23 08:23罗洋坤
软件 2018年2期
罗洋坤
(湖南汽车工程职业学院,湖南 株洲 412001)
0 引言
图像融合在计算机视觉及目标识别方面的应用潜力非常巨大,尤其在计算机视觉方面[1]。车联网远程监控系统中通过在很短的时间内连续拍摄照片并进行传输,但是存在焦点不固定的问题,而且由于汽车在快速行驶过程中容易造成噪声干扰的问题,因此本研究采用图像融合技术对多张不同的焦点照片进行融合,然后再进行中值滤波,对图像进行处理来得到高质量图片[2-3]。
1 图像处理技术
图像融合将多个照片所抓取的对于同一事物的图像帧数据进行细致处理,达到提取有用信息的目的,最大化利用每个照片中的有价值的信息,从而为生成一张高信息的图像做准备,以提高图像信息的利用率,改善精度和可靠性,从而提升原始图像的空间分辨率和光谱分辨率,有利于车联网中的远程视频监测[4]。需要注意的是,融合图像必须提前配准好,确保像素位宽一致,提取多个图像信息。这样做的目的是实现较好的融合效果。可以根据需要综合处理多个图片,从而提高图像利用率和系统对目标识别可靠性。将不同照片所提供的信息加以综合,消除多照片信息之间可能存在的冗余和矛盾,以增强图片中信息透明度,改善精度、可靠性以及使用率,以实现对目标的完整和准确的重现。在图像融合技术方面,可以从数据、特征和决策等层次进行融合。一般目前最为常用的技术是数据融合,通过对所抓取的照片直接进行处理而融合,这个技术处于基础性质的研究,而且非常关键,对于图像融合技术的支撑非常重要,因为这种技术可以保证留下更为原始真实的数据,从而很多细微的信息可以很好地体现出来。对于像素融合技术,一般较为常用的就是空间算法和变换算法空间算法,相对于变换算法有多种融合规则方法可以使用,例如逻辑滤波或者对比调制等方法均可实现。而变换域方法中目前最为流行的是小波变换,比金字塔分解融合法更为先进。本文通过小波变换对连续拍摄的多焦点照片进行融合。
首先读取连续拍摄的 3张多焦点图像融合成 1个图像,如图1、2、3所示。融合之后的图像为图4所示。
图1 连续拍摄图1Fig.1 Continuous shooting picture No.1

图2 连续拍摄图2Fig.2 Continuous shooting picture No.2
然后将其转换成灰度图如图5所示。

图3 连续拍摄图3Fig.3 Continuous shooting picture No.3

图4 融合之后的图像图4Fig.4 Image after fusion No.4

图5 灰度图Fig.5 Grayscale
其图像噪声干扰最大的成分主要为椒盐噪声,因此需要对椒盐噪声进行去噪处理。经过分析很多经典案例发现,摄像机抓取的图像噪声信息特别复杂,主要受离散的脉冲、椒盐噪声、高斯噪声影响,其中高斯噪声具有零均值的特征,并且这三种噪声对图像质量影响严重。图像中一旦存在很多噪声,就会对后期的图像分割造成较大的干扰,并且在特征的提取和图像的识别方面造成巨大的困难。事实上,几乎所有实时抓取的照片都需要进行滤波,消除图像中的噪声就是图像平滑化或滤波[5]。滤波的好处是可以实现适应计算机处理的要求,从对象特征中抽取出特征模式用于识别,消除大部分混融入的各类噪声。当然,滤波处理中不能丢失图像的轮廓和边缘信息,因为这些信息至关重要。一般来说,经过滤波操作后的图像较为清晰,并且视觉信息丰富。在椒盐噪声中,我们需要处理的是盐噪声和胡椒噪声,第一种噪声的属性可以归纳为高灰度噪声,后一种噪声的属性可以归纳为低灰度噪声,这两种噪声很难避免。一般我们在图像中观察到的黑白杂点都属于此类情况,高斯噪声严重的图像如图6所示,椒盐噪声严重的图像如图7所示。

图6 高斯噪声严重的图像Fig.6 Gaussian noise serious image

图7 椒盐噪声严重的图像Fig.7 Salt and pepper noise serious image
通过二维滑动可以实现将像素按值大小排列,形成上升的数据序列[6]。采用二维中值滤波方法对包含有大量椒盐噪声的抓取照片进行滤波,得到去噪之后的图像[7][8]。如图8所示。
2 图像测试
为了补偿图像丢失的细微的轮廓部分,需要增强其边缘或者灰度跳变的区域,这样才能让图像呈现清晰,为了实现这一目的可以采用图像锐化技术,比如使用之前提到的空间方法或者是频域方法。首先需要计算图像的尺寸,通过二维傅里叶变换得到频域信息,将0频域移动到图像中心,设置好二阶巴特沃斯滤波器,并调试二阶巴特沃斯滤波器的D0参数,D0越大,保留的高频信号就越少[9][10]。在试验中,对于不同的照片,可以自行调节,以便得到更好的效果。计算每一个像素点离0频率点的距离,并计算传递函数的值,确定高通滤波之后的值。然后经过傅里叶反变换,再得到滤波之后的图像,也就是锐化之后的图像如图9所示[11]。

图8 去噪之后的图像Fig.8 After the noise image

图9 锐化之后的图像Fig.9 After sharpening the image
通过直方图均衡化处理得到直方图均衡之后的图像如图 10所示。直方图拉伸是通过对比度拉伸对直方图进行调整,从而可以实现对比度极大提高的目标,这可以具体通过线性或者是非线性的技术手段来得以实施。使用直方图均衡化方法的目标是通过调用积累函数,来调整图像的灰度值,从而增强对比度。这种技术的明显优势在于可以增强所抓取照片的某一区域部分的对比度,尤其当某些区域中,存在有大量的有用数据,并且这些数据非常接近的时候,该方法的价值才得到真正体现,使亮度在直方图上呈现出恰当的视觉效果,并不会影响到整体图像的对比度,只是增强了局部效应。归根结底,直方图均衡化方法是对图像进行非线性拉伸的一种尝试,通过对像素的重新安排,使得在一个灰度范围之内的像素数量保持接近。这种方法适合被用在图像背景太亮的情况,或者是前景偏的照片处理中。

图10 直方图均衡之后的图像Fig.10 Image after histogram equalization
然后实施了多种边缘检测方法对比的实验。边缘检测是发现抓取照片区域中亮度变化最为明显和快速的点。通过图像边缘检测技术,可以极大的减少了不必要的信息,保留了获取图像区域里面的关键信息[12]。在一张照片里面,我们把周围灰度变化明显的像素集合称为边缘,在一张图像里面边缘视觉效果最为明显和关键。通常边缘就是指目标和背景区域的划分区域,该区域将成为后面的图像分割阶段的重要手段依据。边缘本身灰度变化不明显,但是其实位置的重要标志。在使用边缘检测方法的时候,我们还需要配合区域划分方法才能更好的实现,这两种方法一般来说都会同时使用,具有互相补充的功能。边缘检测技术是根据闭合部分的边缘来锁定区域,可以提取到获取的照片区域里面最为不连续部分的图像特征。区域划分是把所抓取得到的照片分割成为特征相同的部分,其边界作为边缘来处理[13]。边缘检测方法的优势是不需要将抓取得到的照片进行单一分割,非常适合较大照片的分割处理。图像边缘最为常见的是阶跃边缘,这种边缘特征是分布在两边的照片像素值大小明显相异,而另一种边缘是屋顶边缘,它是处于灰度值变化之中,在中间灰度值部分,属于变化的中间区域。该模板属于边缘检测器,是一种基于梯度的数学方法的滤波器,又称边缘算子。如果图像边缘处于水平,最好用梯度是垂直方向的模板检测其边缘。较为常用的边缘检测模板有Laplacian算子等[14,15]。
采用prewitt边缘检测之后的图像如图11所示。
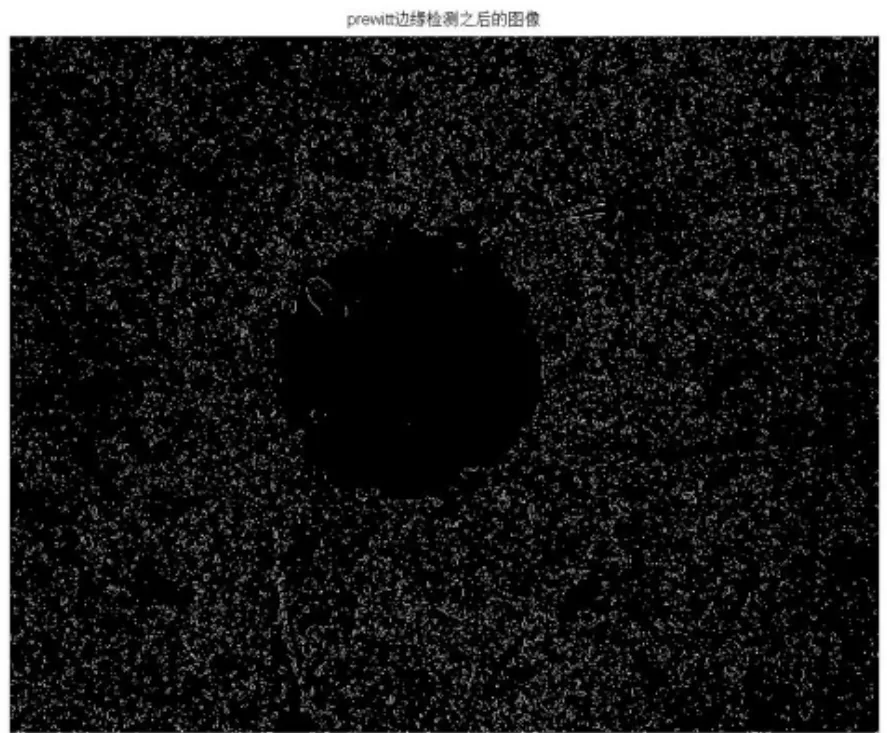
图11 采用prewitt边缘检测的图像Fig.11 Image using prewitt edge detection
采用roberts边缘检测之后的图像如图12所示。
3 结束语
针对车联网远程短时间内连续拍摄照片存在焦点不固定、噪声干扰的问题,本研究采用图像融合技术和中值滤波方法,对图像进行处理。并通过图像锐化、直方图均衡化处理、图像边缘检测等方法来测试分析图像质量[16]。经过测试分析,融合和滤波之后的图像清晰.虽然本文研究取得了某些成果,但是在其它方面仍然存在不足和制约。例如要求对拍摄图片要求严格等,因此还需要作更深入和广泛的研究,得到通用性更好的方法。
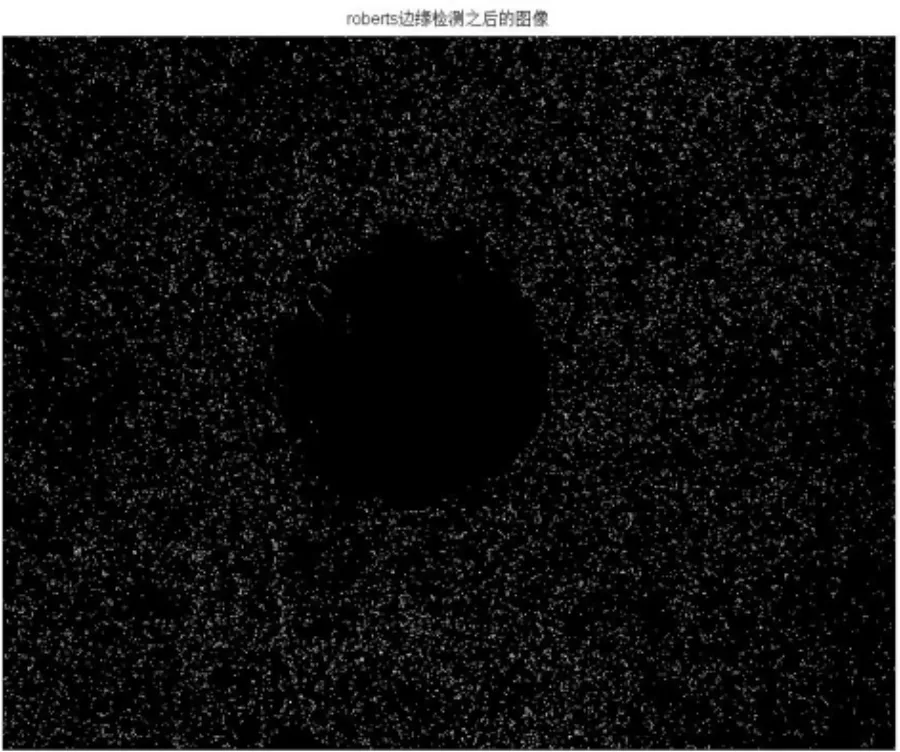
图12 采用roberts边缘检测的图像Fig.12 Using roberts edge detection of the image
采用sobel边缘检测之后的图像如图13所示。
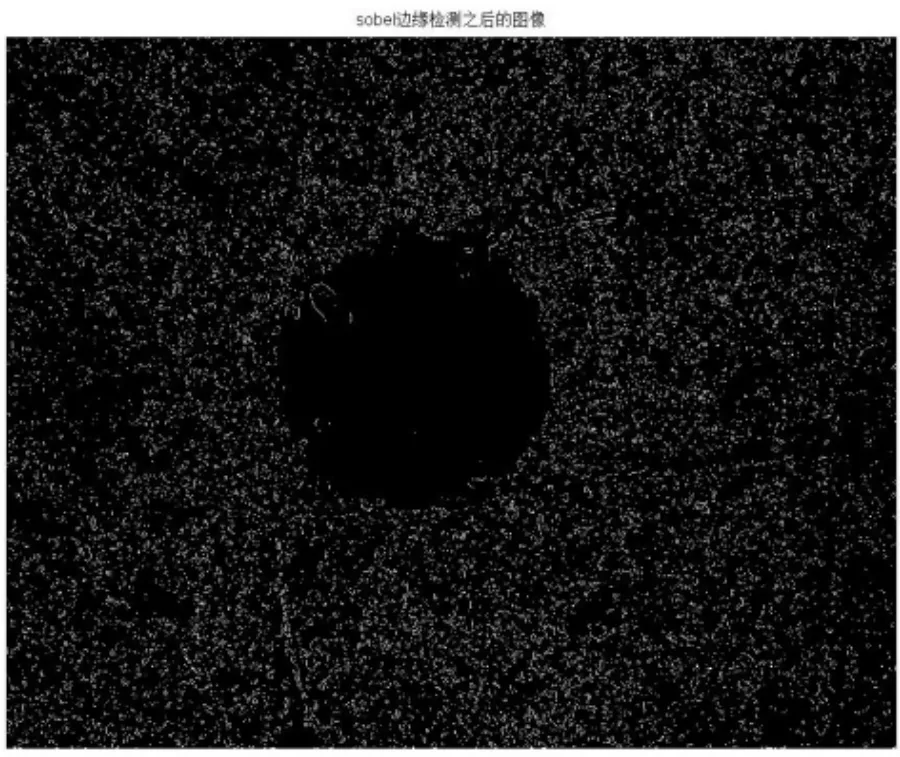
图13 采用sobel边缘检测的图像Fig.13 Sobel edge detection using the image
[1] 霍宏涛. 数字图像处理[M]. 北京理工大学出版社, 2002.
[2] 陈大力. 数字图像处理中去噪算法的研究[D]. 东北大学,2008.
[3] 孙杰, 袁跃辉, 王传永. 数字图像处理自动图像聚焦算法的分析和比较[J]. 光学学报, 2007, 27(1): 35-39.
[4] 王克奇, 马晓明, 白雪冰. 基于分形理论和数学形态学的木材表面缺陷识别的图像处理[J]. 森林工程, 2013, 29(2):48-50.
[5] 周平, 郑文刚, 孙忠富. 基于局部信息的图像滤波及边缘锐化算法[J]. 计算机应用, 2009, 29(s1): 222-222.
[6] 张东宇. 基于FPGA的实时视线定位系统的设计与实现[D].东北大学, 2014.
[7] 陈蒙.医学X光成像中图像去噪算法研究[J]. 软件,2013(11): 62-63.
[8] 曹妍, 陈伟, 徐森. 图像去噪方法研究与仿真[J]. 软件,2015, 36(4): 33-36.
[9] 张铁虎, 王琨, 俞经虎. 应用图像自动识别的蠕动式点胶机研究[J]. 现代制造工程, 2016(7): 101-107.
[10] 唐权华, 周艳, 金炜东. 中值滤波算法的研究与改进[J].微计算机信息, 2008, 24(24): 187-189.
[11] 常捷. 集装箱号识别中图像及字符的处理分割技术[J]. 淮海工学院学报. 自然科学版, 2010, 19(2): 33-36.
[12] 王克奇, 马晓明, 白雪冰. 基于分形理论和数学形态学的木材表面缺陷识别的图像处理[J]. 森林工程, 2013, 29(2):48-50.
[13] 钟彩. 边缘检测算法在图像预处理中的应用[J]. 软件,2013, 34(1): 158-159.
[14] 唐艳丽, 苏燕辰. 数字图像处理在距离测量中的应用[J].中国测试, 2009, 35(1): 63-67.
[15] 刘丽华. 基于混合滤波器的Canny边缘提取算法改进[J].科学技术与工程, 2011, 11(23): 5569-5571.
[16] 刘闻, 别红霞. 基于蚁群算法的噪声图像边缘检测[J]. 软件, 2013(12): 256-259.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
北京航空航天大学学报(2022年6期)2022-07-02
高技术通讯(2021年3期)2021-06-09
摄影之友(影像视觉)(2018年12期)2019-01-28
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07
潍坊学院学报(2016年6期)2016-04-18
计算机工程(2015年8期)2015-07-03
雕塑(1999年2期)1999-06-28
雕塑(1996年2期)1996-07-13
