雷达目标一维距离像识别创新课程设计
2018-03-21 01:40余萧峰毛诚晨熊金涛
实验科学与技术 2018年1期
梁 菁,余萧峰,毛诚晨,熊金涛,万 群
(电子科技大学 电子工程学院,四川 成都 611731)
雷达原理与系统[1-2]是电子科技大学的一门研究生课程,涉及通信、随机过程、信息论及模式识别等许多学科领域。该课程知识点众多,理论性强,概念抽象,传统课堂教授及作业布置等方式难以让学生理解和掌握雷达系统的精髓。
本文作者经过多年探索与尝试,设计了一个基于高分辨率雷达一维距离像[3-4]的目标识别的创新课程设计,将基于信息论的雷达目标识别[5-6]与MATLAB仿真有机地结合在一起,使学生能够深入地领会基本概念和重要算法,提高其学习研究生课程的积极主动性。
基于高分辨率雷达一维距离像的目标识别是一种雷达自动目标识别领域的主要方法。该方法采用宽带雷达照射目标,从而形成径向方向上雷达强散射点构成的时域矢量和。目标强散射点沿着雷达的视线方向展开,反映了丰富的目标结构信息和特征信息,从而能够用于雷达自动目标识别。相对于合成孔径雷达及其他二维、三维可视化的方法,一维距离像因其数据量较小,相干积累时间更短,能够更好地满足目标获取中对信号处理的实时性和较小计算复杂度的要求。
传统的基于欧氏距离分类的相关法[7]和基于ML准则分类的AGC方法[8]在生成模板特征中利用了目标距离像的统计信息,但用来测试的数据则是单次距离像样本,由于没有利用测试目标距离像的统计信息,测试样本方位敏感性很强,从而会影响测试样本和模板的匹配程度。在许多现代雷达体制中,由于可方便地对识别的对象“重访”,可以得到多个独立距离像样本,用小角度范围的平均距离像代替单次距离像作为测试样本,可以在一定程度上提高雷达目标识别性能。
文献[9]中描述了一种基于多次距离像样本的高分辨雷达一维距离像目标识别方法。其核心是利用最小Kullback-Leibler(K-L)距离准则进行目标识别判决。但是由于K-L距离的非对称性,该方法存在局限性。
基于KL距离准则[10-11]的研究,本文作者引入了一种新的距离判决准则,即最小Resistor-Average(RA)[12]距离准则,用以提高雷达目标识别性能。
1 KL目标识别
假设用于训练的目标有c类,视角范围内均匀划分为K不同角域,每个角域的训练数据都为M次独立一维距离像样本,第i类目标第k个角域原始一维距离像第m次样本为:
rikm=[rikm(1),rikm(2),…,rikm(n),…,
rikm(N)]
(1)
式中,rikm(n) 表示距离单元编号为n处的原始距离像幅度,N为距离像长度。
对原始一维距离像样本幅度进行幂变换处理,得到幂变换之后的距离像:
xikm(n)=rikm(n)α(0<α<1)
(2)
对幂变换之后的距离像xikm(n)进行幅度归一化,可得:

(3)


(4)

(5)
L次独立一维距离像样本用于测试数据,测试原始一维距离像第l次样本为:
rχl=[rχl(1),rχl(2),…,rχl(n),…,rχl(N)]
(6)
式中,rχl(n)表示距离单元编号为n处的原始距离像幅度,N为距离像长度。
对测试原始一维距离像样本幅度进行幂变换处理,得到幂变换之后的距离像:
xχl(n)=rχl(n)α(0<α<1)
(7)
对幂变换之后的距离像进行幅度归一化:
(8)


(9)
(10)

(11)
由此可得出最小K-L距离决策准则。
2 R-A距离决策准则
前面介绍的K-L准则虽然能很好地对目标进行识别,但是由于它的非对称性的局限性,本文作者引入了最小Resistor-Average(RA)距离准则。
RA准则是在KL准则的基础上引入了模板距离像的概率密度函数pik(x)相对于测试距离像的概率密度函数pχ(x)的K-L距离:
(12)
于是根据D(pik‖pχ)和前面得到的D(pχ‖pik)可计算pik(x)与pχ(x)之间的R-A距离R(pχ,pik):
(13)
得出最小R-A距离决策准则:
(14)
3 实验设计与效果
3.1 实验内容
实验中用到的一维距离像样本是本文作者在科研过程中得到的,如图1所示,这是其中的一个样本,其为长度为320的原始一维距离像。
r=[r(1),r(2),…,r(n),…,r(320)]
(15)
将这些样本一部分用作模板数据,一部分用作测试数据。采用幂变换对原始一维距离像样本进行处理,x(n)=r(n)0.2,x(n)为处理之后的距离像。用于训练的目标有两类,视角范围内均匀划分为30个不同角域,每个角域的训练数据都为32次独立一维距离像样本。运用上述提到的K-L距离决策准则及R-A距离决策准则,通过MATLAB仿真软件对训练数据进行处理,分别给出K-L距离决策准则和R-A距离决策准则在不同信噪比下的正确识别率曲线,实验流程如图2所示。
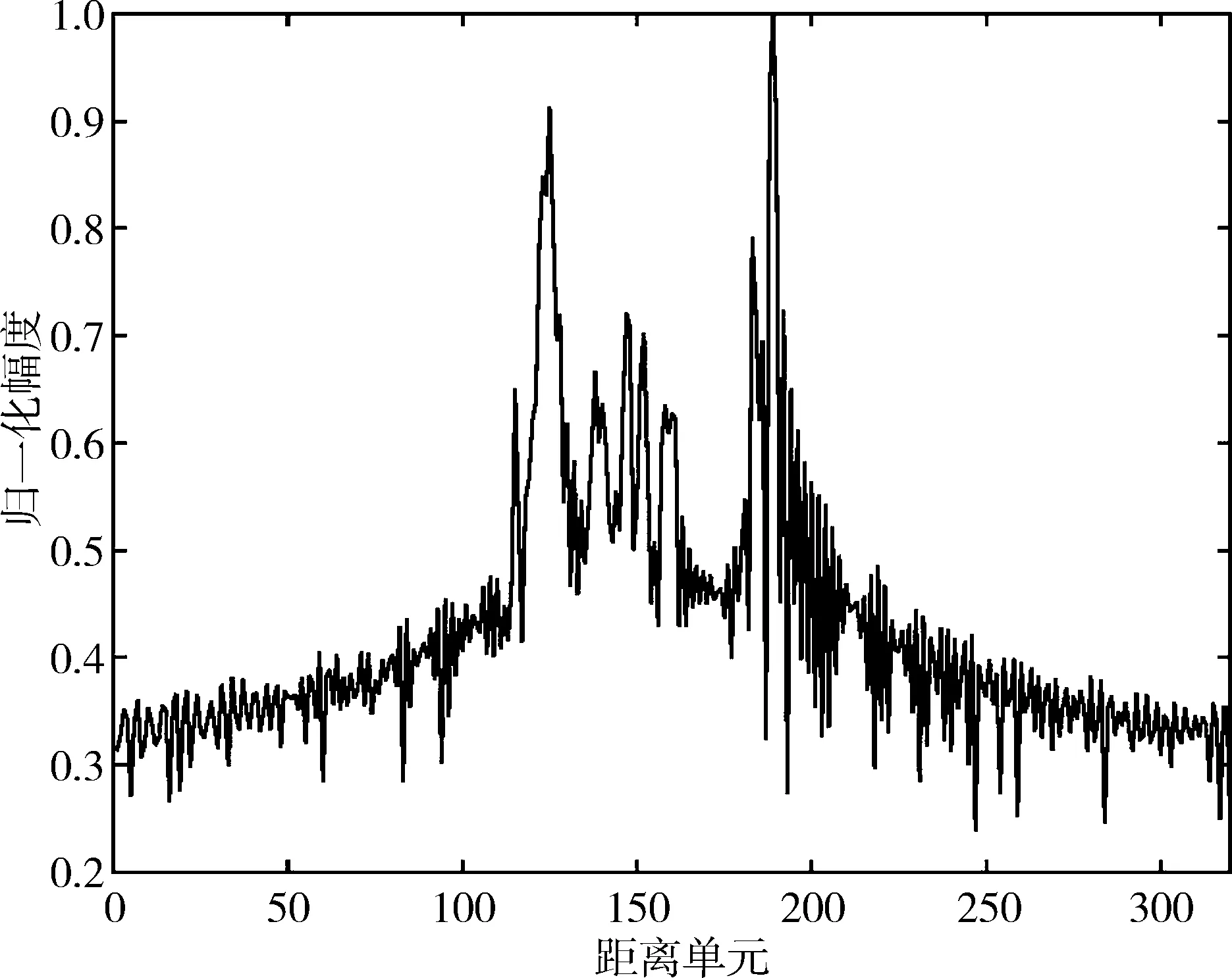
图1 实验用到的HRRP数据

图2 实验流程图
3.2 实验方式
运用上述提到的K-L距离准则及R-A距离准则进行一维距离像目标识别,团队合作,学生自行分组,每组2~3人。
仿真工具为MATLAB仿真软件,参考资料为本文及本文的参考文献。
学生需在老师的指导下完成该实验,每组组员需有明确的分工,实验结果需给出K-L距离决策准则和R-A距离决策准则在不同信噪比下的正确识别率的两条曲线(可放同一张图内),给出分析结果,最终报告以word或pdf等电子档的形式提交,附上组员的姓名、学号及每个人在实验中所做的具体工作,老师根据每组提交报告的质量酌情打分。自实验布置后,3周内完成报告的提交。
3.3 实验结果
本文作者指导学生应用MATLAB分别对K-L距离判决准则跟R-A距离判决准则进行了仿真实验,选取其中一组完成较好的仿真结果,如图3所示。
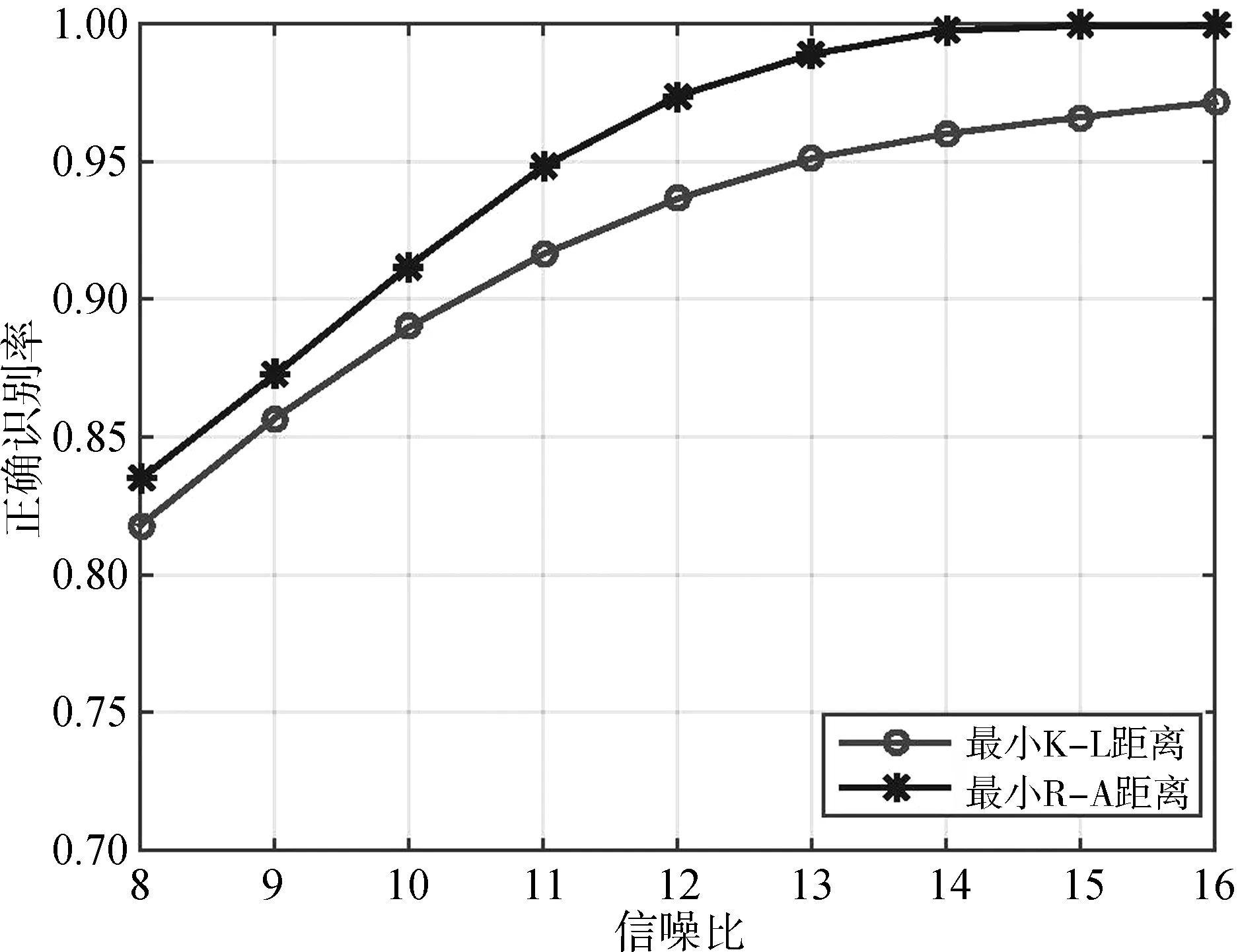
图3 KL与RA正确识别率比较
上图是在16次独立距离像测试样本情况下,采用的最小R-A距离判决准则与最小K-L距离判决准则目标识别率随信噪比的变化曲线。
从图3可得,最小KL距离判决准则与最小RA距离判决准则下的正确识别率均随信噪比的增加而增加。同时,在相同的独立距离像测试样本及相同的信噪比情况下,采用的最小R-A距离判决准则获得的目标识别率要高于最小K-L距离判决准则目标识别率。
4 结束语
本文提出了一种基于多次样本的高分辨雷达一维距离像目标识别方法,采用最小RA距离判决准则,提高了目标的正确识别率。基于雷达目标识别和信息论理论,并通过MATLAB软件仿真验证该理论的可行性,设计了一个包括参数设定、仿真和结果分析的创新性雷达传感网络实验项目。所提出的实验方案合理可行,适合学生实验,能满足科研和教学的需要。
[1]丁鹭飞,陈建春.雷达原理[M].北京:电子工业出版社,2009.
[2]张明友,汪学刚.雷达系统[M].北京:电子工业出版社,2013.
[3]DU L,LIU H,BAO Z.Radar HRRP statistical recognition:parametric model and model selection[J].IEEE Transactions on Signal Processing,2008,56(5):1931-1944.
[4]DU L,LIU H,BAO Z,et al.Radar HRRP target recognition based on higher order spectra[J].IEEE Transactions on Signal Processing,2005,53(7):2359-2368.
[5]SOLOMON K,RICHARD L.On information and sufficiency[J].The Annals of Mathematical Statistics,1951,22(1):79-86.
[6]SOLOMON K.Information theory and statistics[M].Illinois:Courier Corporation,1968.
[7]裴炳南.高分辨雷达自动目标识别分发研究[D].西安:西安电子科技大学,2002.
[8]JACOBS P,O’SOLLIVAN O.Automatic target recognition using sequences of high-resolution radar range-profiles[J].IEEE Transactions on Signal Processing,2000,36(2):364-380.
[9]袁莉.基于高分辨距离像的雷达目标识别方法研究[D].西安:西安电子科技大学,2007.
[10]DO N,VETTERLI M.Wavelet-based texture retrieval using generalized gaussian density and kullback-leibler distance[J].IEEE Transactions on Signal Processing,2002,11(2):146-158.
[11]DO N.Fast approximation of kullback-leibler distance for dependence trees and hidden Markov models[J].Signal Processing Letters,2003,10(4):115-118.
[12]DON J,SINAN S.Symmetrizing the kullback-leibler distance[J].IEEE Transactions on Information Theory,2001,9(3):96-99.
猜你喜欢
数学物理学报(2020年1期)2020-04-21
计算机工程(2020年3期)2020-03-19
电子制作(2019年15期)2019-08-27
中国听力语言康复科学杂志(2019年3期)2019-06-24
小学生学习指导(低年级)(2018年12期)2018-12-29
中国交通信息化(2018年3期)2018-06-13
系统工程与电子技术(2016年7期)2016-08-21
中国交通信息化(2016年2期)2016-06-06
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年4期)2015-11-07