中职学校《工业机器人仿真技术》一体化课程设计
——基于RobotStudio仿真教学软件
2018-03-20 01:56毛暖思
海外文摘·艺术 2018年24期
毛暖思
(广东省海洋工程职业技术学校,广东广州 510320)
《中国制造2025》中明确指出:“在未来发展的过程中,随着各种政策和人口利润等市场因素的影响,我国工业机器人市场本身也还能够保持高速增长的态势,机器人产业势必会对我国的人才有更多的需求。所以越来越多的学校开设了机器人技术专业。但是,很多工业机器人专业的课程开发、教学研究和其他诸多方面都还处于探索的阶段,甚至还存在着教学效率低下等一系列的问题。本文主要结合实际的案例,再将《工业机器人仿真技术》一体化课程设计进行全面详细的论述,希望能够给大家更多的参考性意见。
1 一体化课程的概念
一体化课程是将理论教学和实践教学结合为一体的课程教学模式。通过这样的模式往往能够更好地促进学生认知能力的发展,并能够将职业能力、发展规律和相关的技术更好地结合在一起。学生可以在教学的过程中通过对工作任务、过程和环境进行整体的感悟和反思,从而将技能、过程和方法有效地结合在一起。
一体化课程也可通过“校企合作”的方式来更好地培养学生的能力。通过以学生为中心来全面设计课程的体系和内容,并按照工作的过程和顺序让学生更加自主地安排教学活动,从而有效实现理论教学和实践教学的融合。在这个过程中,通常能够实现整体反思、感悟、知识技能和方法的有效统一。最终都是通过将理论学习和实训顶岗工作相结合的方式来有效地进行的。
2 《工业机器人仿真技术》概述
工业自动化的市场竞争压力日益加剧,客户在生产中要求更高的效率,以降低价格,提高质量。如今让机器仍编程在新产品之始花费时间检测或试运行是行不通的,因为这意味着要停止现有的生产以对新的或修改的部件进行编程。ABB的RobotStudio是建立在ABB VirtualController上的,我们可以使用它在电脑中轻易地模拟现场生产过程,让客户了解开发和组织生产过程的情况。
3 《工业机器人仿真技术》课程在专业课程体系中的作用
工业机器人技术专业主要是为了通过培养高端的技能型人才而存在的专业,为的就是能够让学生有效地完成包括操作、编程、维修和维护等技术任务。每个学生只有掌握了操作工业机器人最实用的技术才能够更好地学习其他专业课程。

表1 专业课程体系示意表
传统的《工业机器人仿真技术》培训主要有成本高、安全隐患多和难以进行独立操作等诸多方面的问题。但是,如果采用RobotStudio仿真软件来进行实际操作,那么就能够有效地避免上述问题发生。并通过对仿真工业机器人进行真实操作,才能够有效地提高学生的动手能力、分析问题和解决问题的能力。
4 工业机器人应用与维护专业课程体系
整个工业机器人应用与维护专业的专业课程体系的内容主要由如下几个方面组成。
如表1所示的内容可以看出,整体工业机器人应用与维护专业的课程内容主要是由理论和实践共同组成的,之后再将学习到的技术有效地运用到实际操作的过程中。
5 一体化课程开发的主要过程
5.1 课程目标
通过针对《工业机器人仿真技术》有效地进行一体化课程设计,主要有以下几个重要的作用:第一,可以让学生全面了解到现代工业机器人仿真软件的发展;第二,通过操作RobotStudio软件往往能够有效地对工业机器人进行全面操作和控制,并在之后全面对机器人进行仿真运行,以便能够帮助大家有更好的软件编程和调试能力。第三,在学习的过程中,学生能够更好地与团队成员进行沟通和协作,并通过获取相关的知识来更好地解决问题,从而为后续机器人的应用奠定良好的素质。
5.2 课程开发的原则
先对典型的工作岗位进行全面的分析,之后再全面地考虑前后课程之间的关系。再根据实际工业机器人操作的特点,以实际岗位和虚拟工作站为实际的载体,之后再让学生更好地学习与工业机器人有关的仿真技术。
5.3 课程主要内容
《工业机器人仿真技术》一般都会开设在中职二年级上学期,本身也属于该专业中的核心课程。由于学生在之前学习到了关于工业机器人电气、机器结构、机器人分类和工作原理进行全面了解。学生可以通过掌握工业机器人在实际工作中的工作过程、操作方法和操作步骤来更好地学习实际的内容。
5.4 教学内容安装
5.4.1 认识和安装RobotStudio系统
先让学生了解工业机器人仿真技术的发展现状,并在之后让更多的学生来认识和安装RobotStudio仿真软件。
5.4.2 布置基本工业机器人仿真工作站
当学生了解过工业机器人仿真技术之后,之后再全盘布置基本的工业机器人仿真工作站。主要可以通过如下几个步骤进行:第一,先全面布置机器人工作站系统,并对系统全盘进行分析;第二,让学生进行手动操作练习;第三,全面创建工件坐标编程轨迹;第四,录制整个工作站运行仿真和视频。
5.4.3 全面使用RobotStudio中的建模功能
全面通过运用RobotStudio中的建模工具和测量工具来创建一个有效的机械滑台,之后再全面创建机器人工具。
5.4.4 全面实现离线编程功能
先创建机器人运行的轨迹和路径,并有效地调整运行的轨迹和运行的命令。完成上述两个步骤之后在有效地配置轴参数,并在之后碰撞检测相关的数据。
5.4.5 虚拟示教器的使用方法
先全面熟悉虚拟示教器的基本操作,并在之后设置专用的DSQ625板卡,并运用合适的方法来设置通信信号。
5.4.6 有效地创建导轨和变位机的机器人系统
先全面创建带导轨的机器人控制系统,之后再全面创建与变位机的机器人系统相关的控制系统。
上面是通过项目的方式来有效地实现《工业机器人仿真技术》一体化课程的设计。主要可以让学生学习到包括工业机器人软件的安装、工业机器人系统创建、离线编程和仿真、创建机器人装置和其他几个过程组成。
6 一体化课程实际案例运用
上面主要讲述了一体化课程的设计过程,从内部可以看出,主要可以采用项目式教学和任务驱动的方式让学生通过学习工业机器人的仿真过程来更好地熟悉实际工业机器人的操作技能。

图1 输送线流程示意图
6.1 新课导入
先可以全面介绍工业机器人的码垛技术,之后再结合实际应用的情况来全面分析工作站。
6.2 码垛仿真
可以针对工作站布局和输送线段的流程设计来全面抓取流程设计的整个过程。之后也可以通过全面组织输送线动作设计和工业机器人动作效果设计相结合来有效地设计码垛工作站内部的组件,一定要注意在设计的过程中调整如下部分的程序:
PROC Main
rInit ALL
WHILE TRUE DO
IF bPalletFull=FALSE THENs
rPick;
rPlace;
ELSE
WaitTime0.5;
如图1所示,主要显示了整个输送线内部的主要流程,在操作的过程中,我们一定要按照相关的流程来操作,才能够有更好的效果。
6.3 自由练习
学生一定要通过自己动手来全面了解仿真的要领,只有通过熟悉垛码的全过程才能够有效地解决仿真过程中可能会出现的各类问题,并在之后取得好的效果。整体仿真的过程如图2所示。
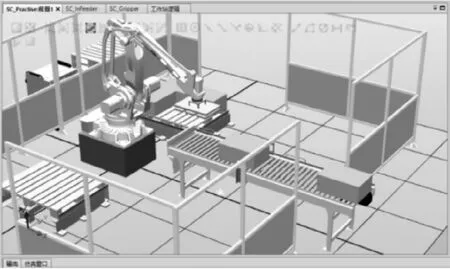
图2 垛码仿真示意图

表2 考核评价示意表
6.4 项目考核方式
如表2所示,我们可以看出主要强调了考核形式的多样性、考核控制的过程和考核的目标,并在之后采用过程评价法和结果评价法相结合的方式来进行考核。老师在考核的过程中尤其需要结合考勤情况、学习态度、操作规范和任务完成的情况进行全面的分析,并在之后综合地评定学生的成绩。
此外,也尤其需要结合一体化课程的具体特点,结合学生的综合素质来评定学生的成绩,并通过有效的分析学生动手能力和实践的分析来让学生更好地解决实际问题的能力。尤其需要对实践能力强的学生进行有效地鼓励。
7 “一体化”课程的创新点
整个《工业机器人仿真技术》课程主要是由机器人工作站、离线编程轨迹和自定义的仿真理论来更好地结合在一起。在教学的过程中,主要通过理论和实际相结合的方式,让学生能够在学习理论知识的过程中来更好地进行实践。正是因为在企业发展的过程中,一般都会采用工业机器人作为授课的载体,从而使得学生能够在学习的过程中更好地进行生产。
在教学的过程中,老师除了可以在课堂上给学生讲课,还可以运用多媒体视频资料和实际生产相结合的方式给学生布置任务和指导书,从而也就能够让学生在实际操作的过程中完成相应的任务。整个生产项目都能够更好地和企业生产的实际情况联系在一起。
8 采用一体化课程设计的优势和缺点
8.1 采用一体化课程设计的优点
通过将课程一体化设计运用于《工业机器人仿真技术》研究的过程中,往往有以下几点优点:第一,学生往往能够通过实际的操作来更好地巩固在学习工业机器人时的理论知识;第二,正是因为在实际操作的过程中和企业的需求更好地联合在了一起,往往能够全面熟悉工业机器人的仿真过程和实际操作的情况;第三,在使用的过程中往往能够有效地降低设备的损坏率。
8.2 采用一体化课程设计的缺点
学生在将一体化课程设计运用于《工业机器人仿真技术》的学习过程中时,通常会产生如下几点问题:第一,目前还没有开发出一系列有针对性的教材,老师尤其需要结合自身的实际情况来全面进行编写。第二,正如文章中所呈现的内容一样,主要都是采用项目法来全面地进行教学,但是在教学的过程中,学生其实会遇到各种各样的问题。又因为很多老师没有在企业实践的经验,所以老师在遇到一些突发状况时往往疲于应付。第三,大部分学校的人力和财力都较为有限,所以有必要进一步提高实践教学的效率,只有这样才能够让课程中的理论和实践过程更好地结合在一起。
9 结语
综上所述,本文主要具体分析了“一体化课程”在《工业机器人仿真技术》中的运用效果。文章中重点论述了课程开发的原则、课程目标、教学内容、教学方法和教学方法,并对每一个环节进行详细的论述。而从实际的情况来看,这种工业一体化的课程教学模式往往能够更好地提高教学的效率,并在之后全面提高学生的能力和水平,并更好地延长设备的使用寿命,并在之后为后续课程的顺利进行奠定良好的基础。但在教学的过程中也确实会发现一些问题,学生尤其需要在后期教学的过程中有效地运用相关的策略。总而言之,将一体化课程设计运用于《工业机器人仿真技术》的教学过程中一般都会有更好的效果。
猜你喜欢
今日农业(2022年16期)2022-11-09
现代仪器与医疗(2022年4期)2022-10-08
中国中小学美术(2022年4期)2022-05-31
电脑知识与技术(2022年11期)2022-05-31
科学与财富(2021年36期)2021-05-10
电脑报(2020年32期)2020-09-06
福建基础教育研究(2019年4期)2019-05-28
中国校外教育(下旬)(2017年3期)2017-06-30
教书育人·高教论坛(2014年7期)2014-08-27