基于前景判别超像素分割的目标检测跟踪算法*
2018-03-06 03:45李忠海梁书浩
火力与指挥控制 2018年2期
李忠海,杨 超,梁书浩
(沈阳航空航天大学自动化学院,沈阳 110136)
0 引言
视频信息技术涵盖了很宽的领域。从常见网络视频到神秘的宇宙飞船,从公共安全到军事领域,从智能监控到视频压缩,从步态识别到人体分析,无论视频应用千差万别,视频技术大多遵循类似的框架:信息预处理、运动目标检测以及目标跟踪。考虑到场景的复杂性,如时变的光照,目标形变以及遮挡等问题,这些因素使在目标检测与跟踪过程中任具有挑战性。文献[1]将超像素理论用于目标跟踪,利用超像素把视频帧的前景与背景进行分割,并利用条件随机场和Delanunay三角化对图片进行区间匹配。但此方法无法改进在目标遮挡情况下跟踪问题。文献[2]使用分类的AdaBoost目标跟踪算法,判别像素属于目标的前景还是背景,结合Mean-Shift搜索过程,采用超像素分割计算出置信图,确定跟踪目标,但该算法在复杂背景下,跟踪效果不理想。文献[3]利用像素的特征信息对目标上下文区域进行聚类,形成像素块区域,通过时间上下文中像素块特征的相似性,对空间上下文进行加权处理。但当运动目标发生视觉尺度变化,跟踪效果显著下降。文献[4]提出SL算法寻找最优路径的方式,在水平和垂直两个方向将图像分割成较小的图块,计算超像素。该算法分割结果过多依赖于输入的边界图质量。文献[6]采用SLIC算法分割图像提取特征进行外观模型建模,结合SIFT特征形成词汇本,最后利用金字塔LK追踪器进行预测运动目标下一帧位置。但该方法在目标遮挡情况下,跟踪效果明显下降。
针对于目标跟踪过程中目标外部几何形状变化与遮挡问题,在文献[2]基础上,提出结合AdaBoost算法对目标前景进行判别,在训练阶段,利用SLIC算法对目标搜索区域进行超像素分割,提取目标特征,采用Mean-Shift聚类[7]构造目标判别外观模型;结合目标模板与候选样本直方图建立运动目标外观模型;在跟踪阶段,对更新的图像帧进行区域搜索,利用K-mean聚类第一帧图像得到特征群,计算运动目标直方图相似度和重构误差,采用联合外观模型解决目标外观变化和遮挡问题,实现较好的运动目标跟踪效果。
1 基于HOG特征和AdaBoost算法分类检测
在文献[2]基础上,本文提出HOG特征和Sobel算子计算边缘梯度信息,用式(1)计算每帧图像的梯度值 G(x,y):
Gx(x,y)是横向亮度差分值,Gy(x,y)纵向亮度差分值,由式(2)计算像素梯度的方向:
式(3)中mi为第k个HOG特征所属样本空间的中位值,hik为HOG提取后在第k个样本空间上第i特征的特征值,N是样本空间大小。弱分类器gi由式(4)表示:
其中,d(hi,mi)为hi与mi的巴氏距离,θi是分类器gi的阈值。目标特征提取后,采用AdaBoost算法进行特征训练,设定运动目标样本空间X,样本训练S与样本类别Y。
利用允许误差εi调节弱分类器hi(xi)的权重αi:
更新训练样本权重,Di+1(xi)式(9)新的样本分布:
Zi为归一化因子,使,经过T轮调节,得到T个最佳弱分类器,根据式(10)将hi(x)与对应权重级联起来,得到强分类器H:
对测试目标序列帧进行判别,利用AdaBoost强分类器进行目标检测,提取前景,确定搜索区域。
2 超像素分割
在文献[5]基础上,先采用前m帧目标序列作为训练图像进行超像素区域分割,提取运动目标特征,生成目标特征向量,利用Mean-Shift聚类生成特征群,计算置信值构造基于超像素分割的判别型外观模型。在跟踪阶段,结合超像素特征池,生成模板直方图与置信图,候选样本采样,生成候选样本置信值,建立生成型外观模型。
2.1 基于超像素分割的判别型外观模型
在训练阶段,采用SLIC分割算法将搜索区域分割为 Ki个超像素块,s(t,q)(t=1,2,…,m,q=1,2,…,K)t为第t帧中第q个超像素,并将其量化为ftq特征向量,构建目标超像素特征群F,利用Mean-Shift方法将特征群F聚成N类。由式(11)计算每个聚类置信值,根据置信值确定每个聚类N(i)属于目标或背景的概率:
式(11)中,A(+i)是第i个聚类所有超像素块与训练目标超像素块的重合面积;A(-i)是第i个聚类所有超像素块域与训练目标超像素块的未重合面积;归一化处理,得到最终聚类置信值是判别聚类N(i)超像素属于前景与背景的概率,ε为常量。由超像素聚类中心fc(i),聚类半径rc(i),特征池F与最终聚类置信值Dfi,构造超像素判别的外观模型。
在跟踪过程中,新的一帧图像进行像素分割聚类,聚类N(i)根据前景与背景的置信值Dfi判别该超像素属于目标与背景的可能性。由式(12)和式(13)计算每类超像素的置信值:
Cq是分割后超像素 s(t,q)的置信值,w(q,i)是距离权重项,表示第t帧的第q个超像素的聚类中心fc(i)和其所属的特征向量的距离权重,H是ftq与fc(i)的协方差矩阵。将Cq赋给超像素s(t,q)所包含的像素,在检测目标邻域以外的像素赋值为0,得到当前跟新目标图像置信图。
2.2 基于超像素分割的生成型外观模型
在得到N个候选样本的目标置信图后,采用粒子滤波采样获得相同大小图像 Wl,l=1,2,…,N,由式(14)计算样本置信值:
式(14)中,vl(i,j)是Wl中位置(i,j)的像素值。引入目标尺度适应参数,用式(15)计算目标尺度因子El:
其中,Dl是候选样本置信值,A(Xtl)为第t帧第l个候选样本区域面积,A(Xt-1)为第t-1帧跟踪区域面积,利用进行归一化处理到[0,1],最终候选样本置信值为Efl。
在训练结束后,采用粒子滤波对上一帧图像采样,获得候选样本Xtl(l=1,2,…,N),利用重叠流动窗口获得大小一样的Q图块,提取图像特征和向量,h为区域维度。对输入第一帧手动标记目标区域K-mean聚类形成词汇本B。在跟踪过程中,用词汇本B表示生成的目标模板[10]采样,通过式(16)求解分割后每个子区域块系数向量αk:
式中,β为αk的集合构成候选样本直方图。
通过式(18),式(19)对样本直方图进行修正:
式(18)中,yk表示第k个超像素块特征向量,δk为超像素块向量yk的重构误差。
2.3 贝叶斯框架下目标跟踪定位
在贝叶斯框架下,第一帧目标在图像的位置采用手动标记,在训练中依据式(20)进行跟踪,式(21)得到跟踪目标最大后验估计值。
式(20)中,Xi代表第 i帧的目标状态,,其中,是目标中心位置,Xix,Xiy是目标区域尺度的x轴和y轴,Y1∶i表示到i帧为止所有观测值,η为归一化常数,Yi为第i帧状态Xi的观测值,p(Yi|Xi)是第i帧目标观测估计,p(Xi|Xi-1)是预测下一帧目标状态的运动特征。
ζ为对角协方差矩阵,元素包括尺度标准差σs和目标位置标准差σc,根据其标准差判别目标尺度和位置变换情况,利用式(23)计算第l个候选样本Xil的运动状态:
将计算得到运动模型和观测模型代入到式(20)和式(21)即可获得第t帧运动目标状态和候选样本最大估计,锁定目标。
3 模型更新与遮挡处理
采用在线学习运动目标更新,在跟踪过程中对成功匹配运动目标图像序列,每隔R帧当前图像序列添加训练目标序列中,同时删去最早图像帧,保证在长时间训练运动目标有最新更新信息。如图1所示。式(25)判别目标是否被遮挡:
4 本文算法描述
本文基于前景判别的超像素图像分割的目标跟踪检测方法,首先根据AdaBoost分类器将运动目标前景进行判别,确定搜索区域。选取M帧图像作为训练图像集,采用SLIC超像素分割算法与Mean-Shift聚类,建立运动目标外观判别模型;对样本采用重叠滑动方法得到局部图块,利用K-Mean聚类,计算置信值与置信图,采用目标模板直方图相似性与候选样本直方图,建立生成型外观模型,在贝叶斯理论框架下,实现运动目标检测与跟踪。具体基于超像素建立判别型与生成型目标跟踪算法如图2所示:
4.1 初始化
1)手动标记第一帧跟踪目标位置,利用AdaBoost算法确定目标搜索区域;
2)利用贝叶斯后验估计到M(M=5)帧,将前M帧图像作为训练图集。
4.2 基于超像素判别型外观模型
1)从训练图像提取一组样本X;
2)利用SLIC算法分割目标区域,形成特征池;
3)采用Mean-Shift算法聚类,计算聚类置信值,判别所属目标或背景可能性;
4)生成置信图,计算候选样本的置信值;
5)建立判别型外观模型。
4.3 基于超像素生成型外观模型
1)利用粒子滤波对前一帧采样,生成N个候选样本;
2)利用重叠滑动窗口法获得Q个图块,并转为向量;
3)对第一帧图像,运用K-means算法计算词汇本;
4)计算候选样本直方图与目标模板直方图相似度;
5)建立生成型外观模型。
4.4 运动目标跟踪过程(从第M+1帧图像到最后一帧)
1)在贝叶斯框架下,计算观测与运动模型;
2)目标状态的最大后验估计;
3)每间隔R帧,将新的一帧跟踪图像添加训练图像序列;
4)联合判别型与生成型外观模型,每隔T帧判别;
5)利用式(25)判别遮挡情况;
6)循环执行1)~5)步骤,直到最后一帧。
5 实验结果分析
为表明本文方法对处理目标形变与遮挡问题有效性,采用http://www.visual tracking.net常用数据库中3个视频“小瓶”“人脸”“行人”进行分析比较。利用检测目标位置窗口度量跟踪效果,选取IVT[5]、MIT[6]、TLD[8]算法与本文算法对比分析,下页图 3中,A视频有较多相似目标小瓶,增加了辨别难度,同时人为方式不断改变目标小瓶的位置,使小瓶发生遮挡与移动。从370帧中可以看出IVT和TLD算法出现检测失误且有较大漂移出现,但本文算法依然能够准确锁定目标小瓶,进行检测跟踪。在B视频中,使用书本进行人脸遮挡且头部发生转动,增加了遮挡幅度,从检测效果看出几种算法都能检测出人脸位置,但本文算法能更加精确锁定人脸位置。在视频C中,行人出现车辆局部遮挡与完全遮挡情况,且行人发生外观形状改变,检测过程中,IVT、MIT和TLD算法均出现不同程度漂移,TLD几乎完全丢失行人目标。
所选视频中包含了运动目标跟踪过程,发生了视觉外观尺寸变化、目标长时间遮挡、运动姿态改变以及光照变化等因素,具有所研究问题的特点。图4给出了IVT、MIT、TLD和本文的行人跟踪误差平均值以及每种算法每一帧跟踪误差曲线,从图中可以看出:本文提出前景判别超像素检测方法明显优于以上3种算法的跟踪精度。
结合表1比较,针对复杂情况下,不同光线、目标外形尺度改变和遮挡问题,IVT算法虽然能实现在进行检测与跟踪,但是检测准确率较低,MIT算法对处理跟踪目标尺度变化时,其检测准确率明显下降,TLD算法虽然有较高准确率,可是当跟踪目标发生长时间局部或完全遮挡时,其跟踪准确率显著下降,而本文提出基于前景判别超像素分割算法,能较好处理此类问题,检测率达到90.22%,在本文研究的复杂背景情况下,其跟踪效果优其他3种算法。
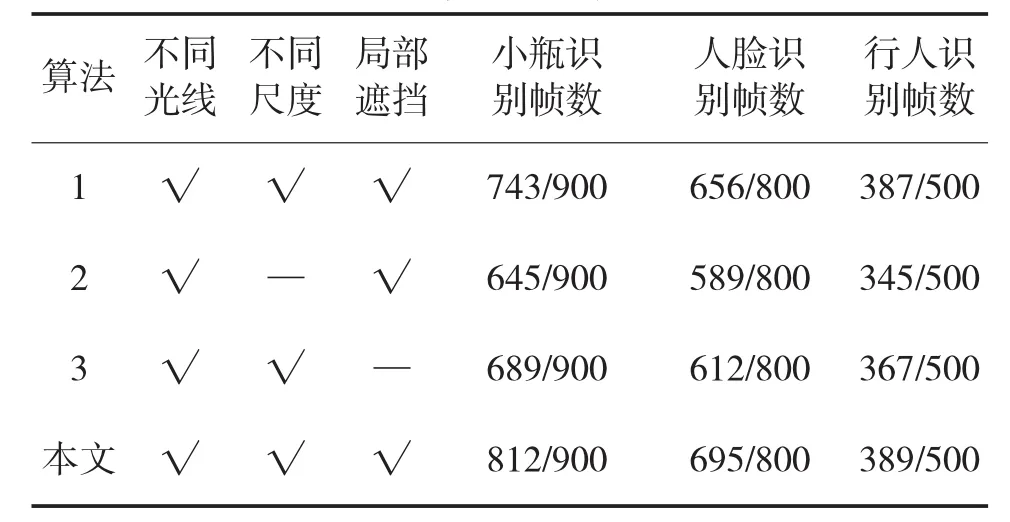
表1 算法性能分析
6 结论
基于前景判别的超像素分割的目标检测跟踪算法,通过HOG特征与AdaBoost分类器进行目标前景提取,采用超像素分割方法建立判别型与生成型目标观测模型,计算图像置信值与置信图,结合目标模板与运动目标直方图相似度,在贝叶斯跟踪框架下,根据最大后验估计确定最终目标位置。从仿真的结果看,本文方法能有效改善复杂背景下多目标干扰、遮挡与目标形变问题,且该算法有较好的目标跟踪准确性和鲁棒性。
[1]REN X,MALIK J.Tracking as repeated figure ground segmentation[C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition.Chicago:IEEE,2007:17-22.
[2]AVIDAN S.Ensemble tracking[J].IEEE Transation on Pattern Analysisand MachineIntelligence,2007,29 (2):261-27.
[3]王淑敏,宫宁生,陈逸韬.加权的超像素级时空上下文目标跟踪[J].计算机应用研究,2016,33(1):1-7.
[4]LIU B,HUANG J,YANG L,et al.Robust tracking using local sparse appearance model and k-selection[J]IEEE Transactions on Pattern Analysis and Machine Intelligence(S0162-8828),2013,35(12):2968-2981.
[5]罗会兰,钟睿,孔繁胜.基于超像素的点追踪方法[J].中国图象图形学报,2014,19(3):428-438.
[6]YANG F,LU H,YANG MH.Robustsuperpixeltracking[C]//IEEE Transactions on Image Processing:IEEE,2014:1057-7149.
[7]WANG S,LU H C,YANG M H.Superpixel tracking[C]//2011 International Conference on Computer Vision:ICCV,2011,6126385:1550-5499.
[8]ZHOU X,LI X,HU W.Learning a super pixel-driven speed function for level set tracking[C]//IEEE Transactions on Cybernetics:TCYB.2015:2168-2267.
[9]JING L,YING C,CHENG Z.Tracking using super pixel features[C]//2016 Eighth International Conference on Measuring Technology and Mechatronics Automation:ICMTMA.2016.
[10]HUANG G,PUN C M,LIN C.Video object tracking using interactive segmentation and super pixel based gaussian kernel[C]//2015 19th International Conference on Information,Visualisation:IV,2015:1550-6037.
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
北京航空航天大学学报(2022年8期)2022-08-31
学苑创造·A版(2022年4期)2022-06-18
阅读(快乐英语高年级)(2022年6期)2022-06-17
护理学报(2022年3期)2022-03-11
家庭影院技术(2021年10期)2021-11-20
计算机应用与软件(2021年7期)2021-07-16
中国传媒大学学报(自然科学版)(2021年5期)2021-02-24
火力与指挥控制(2020年12期)2021-01-22
互联网天地(2016年1期)2016-05-04