
基于Chebyshev区间方法的动力总成悬置系统稳健性优化
2018-03-03 03:23:58李士爱邓支强舒宏超
中国机械工程 2018年3期
陈 剑 李士爱 刘 策 邓支强 舒宏超
合肥工业大学噪声振动研究所,合肥,230009
0 引言
动力总成悬置系统是汽车振动系统中一个重要子系统,起着支撑部件和隔离振动的作用。悬置系统设计的优劣对整车的NVH(noise,vibration,harshness)性能有重大影响,对悬置系统进行合理的设计可有效地降低汽车的振动噪声,因此,动力总成悬置系统的优化设计对整车的NVH性能极为重要。而动力总成悬置系统设计的基本任务就是进行动力总成刚体振动模态的频率配置和解耦布置[1-3]。
传统的分析和设计只是假定悬置系统参数为确定值而进行的确定性研究[1-3],然而在悬置系统各零部件的制造、安装及其系统的使用过程中,各悬置元件的刚度、位置、角度等影响整车振动的关键性参数会不可避免地出现一定程度的偏差或波动,故传统方式可能会导致不恰当的设计。目前常用的研究非确定性问题的方法有概率方法(随机方法)、模糊方法和区间分析方法等。沈忠亮[4]将悬置刚度、安装位置和角度等参数作为正态随机变量,对悬置系统的解耦率应用多目标粒子群算法进行了稳健性优化设计。吴杰等[5-6]采用区间数对悬置元件刚度参数变化的不确定性进行描述,提出了改进区间截断方法,并对悬置系统固有频率和解耦率变化范围进行了计算。相比较而言,获得不确定参数的变化范围通常比得到不确定参数真实的统计特性和模糊数的隶属度函数容易,邱志平等[7-8]通过实例对区间分析方法和概率方法进行了比较,结果表明区间分析方法结果有效且包括更多的可能解。
本文应用基于区间数学和Chebyshev理论建立的区间分析方法,分别计算动力总成悬置系统固有频率和解耦率随悬置刚度波动的变化范围,并利用区间型稳健优化方法对系统的解耦率和频率进行稳健性优化分析。
1 基本理论
1.1 Chebyshev区间分析方法
区间分析方法有广泛的工程实际背景。Chebyshev区间方法是由吴景铼等[9-10]提出的。k阶一维Chebyshev级数在x∈[a,b]内用Ck(x)表示,其关系表达式如下:
Ck(x)=coskθ
(1)
当x∈[-1,1]时,Chebyshev级数存在以下的递推关系:
(2)
正交性是Chebyshev级数的一个重要性质,即对于k阶Chebyshev级数Ck(x)和p阶Chebyshev级数Cp(x),有

(3)
设存在函数f(x)∈C[a,b],则它可用一个基于Chebyshev级数Ci(x)的k阶多项式pk(x)来近似的表示,即有
(4)
式中,f0、fi均为常系数。
这是将原函数展开成多项式,利用区间算法计算各项的值,再进行求和计算原函数的扩张区间。因此可将式(4)中的变量x替换为区间变量[x],则区间函数[fCn]([x])为
(5)
由于[θ]=[0,π],对于k>0的Chebyshev级数恒有Ck([x])=[cos](k[θ])=[-1,1],因此式(4)可进一步变换为
(6)
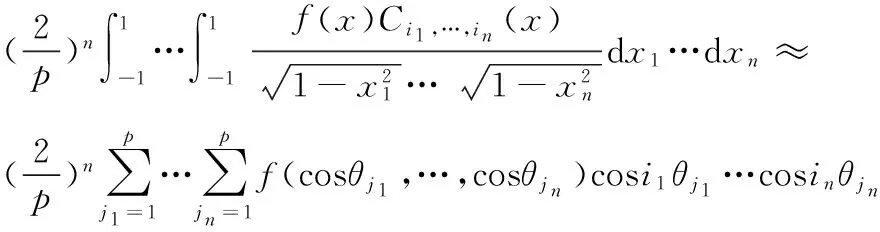
只要计算表达式中的系数函数fi,就可以得到函数的区间。根据Chebyshev区间方法的正交性和Gaussie-Chebyshev求积分公式可推导出下式:
(7)
式中,xj为插值点。
xj=cosθj
将一维问题延伸至多维问题。n维Chebyshev多项式对x∈[-1,1]n定义为每一维Chebyshev多项式的张量积:
Ck1,k2,…,kn(x1,x2,…,xn)=cosk1θ1cosk2θ2…cosknθn
(8)
其中,θi=arccosxi∈[0,π]。则
(9)
考虑式(6),则k阶Chebyshev扩张函数为
(10)
其中,l等于n维Chebyshev级数Ci1,…,ik(x)的下标中包含0的个数,例如,C0,0(x)对应的l=2,而C2,1(x)对应的l=0等。
1.2 误差分析
Chebyshev区间方法的误差来源主要有[10]:
(1)在区间运算过程中,由于区间算法规则本身具有包裹效应易发生区间扩张现象,使得计算的参数区间大于真实区间。
(2)近似为多项式时的截断误差。如果函数f(x)具有k+1阶连续导数,则近似的截断误差为
(11)
由式(11)可知,k越大,截断误差越小,因此k足够大时,该误差可忽略。
(3)计算系数时的数值积分误差。积分公式的误差可表示为
(12)
式中,ξ为[-1,1]的任意数。
则当插值积分公式中的最髙阶次p足够大时,该积分误差即可忽略。由于求插值点数量不能少于未知数个数,故参数p取值不应小于k+1。当k较大时,截断误差和数值积分误差都较小,且该误差的大部分影响会湮没在低阶项部分中,因此它对计算精度的影响基本可忽略。
而Chebyshev级数在区间算法中采用了三角函数表达式[10],能更有效地控制区间算法的包裹效应,从而更接近于实际的上下界限。
1.3 频率和解耦率的Chebyshev区间分析方法
应用Chebyshev区间分析方法对动力总成悬置系统的固有频率和解耦率随悬置参数波动的区间范围的求解过程如图1所示。
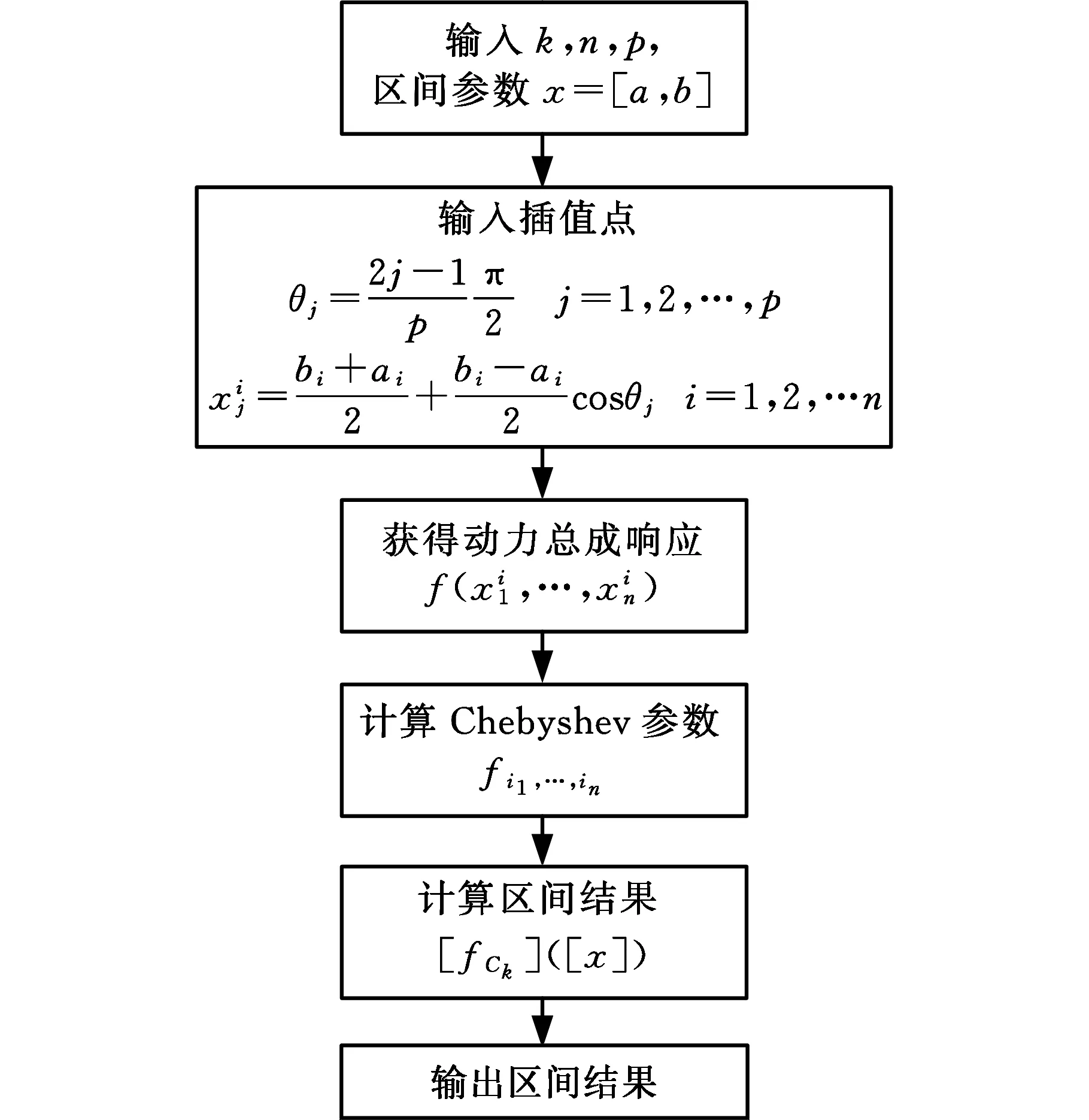
图1 Chebyshey区间分析方法流程图Fig.1 Flow chart of Chebyshey interval analysis method
2 固有频率和解耦率的区间优化模型
整车对动力总成系统安装位置的限制较为严格,尤其对于改进车辆,一般不改变各悬置的安装位置坐标和安装角度,因此常选择悬置刚度作为优化设计变量。为了获得更为稳健的悬置系统的固有频率和解耦率,在进行优化设计时,应综合考虑各种不确定因素导致关键参数的变化对优化结果可能产生的影响。为此提出区间优化方法,考虑最优设计参数发生波动时进行稳健优化设计[12]。
传统优化模型只考虑获得尽量高的解耦率,区间优化模型还需要使解耦率变化区间随刚度参数波动变化半径最小,从而保证各解耦率的稳健性。
悬置系统解耦率的区间优化模型为
(13)

区间优化采用遗传算法[13]对稳健优化模型进行全局优化计算,以区间优化模型为遗传算法的适应度函数,以悬置各刚度值为设计变量,寻优计算得到稳健可靠的优化解。
3 算例
根据某型待改进汽车动力总成悬置系统具体情况,同时考虑动力总成刚体模态固有频率远低于其弹性模态固有频率,可将动力总成作为刚体考虑。因此可将发动机悬置系统简化为:通过若干个三维黏-弹性悬置元件支承于车架上的具有6个自由度的模型。算例为四点平置式悬置,其布置如图2所示。动力总成的坐标系原点选在总成质心处,X轴平行于曲轴中心线,指向发动机前端,Z轴平行于气缸中心线,指向发动机缸盖,Y轴按正交坐标系的右手定则确定,悬置元件的三向刚度轴(u、v、w)分别与参考坐标系轴(X轴、Y轴、Z轴)平行。
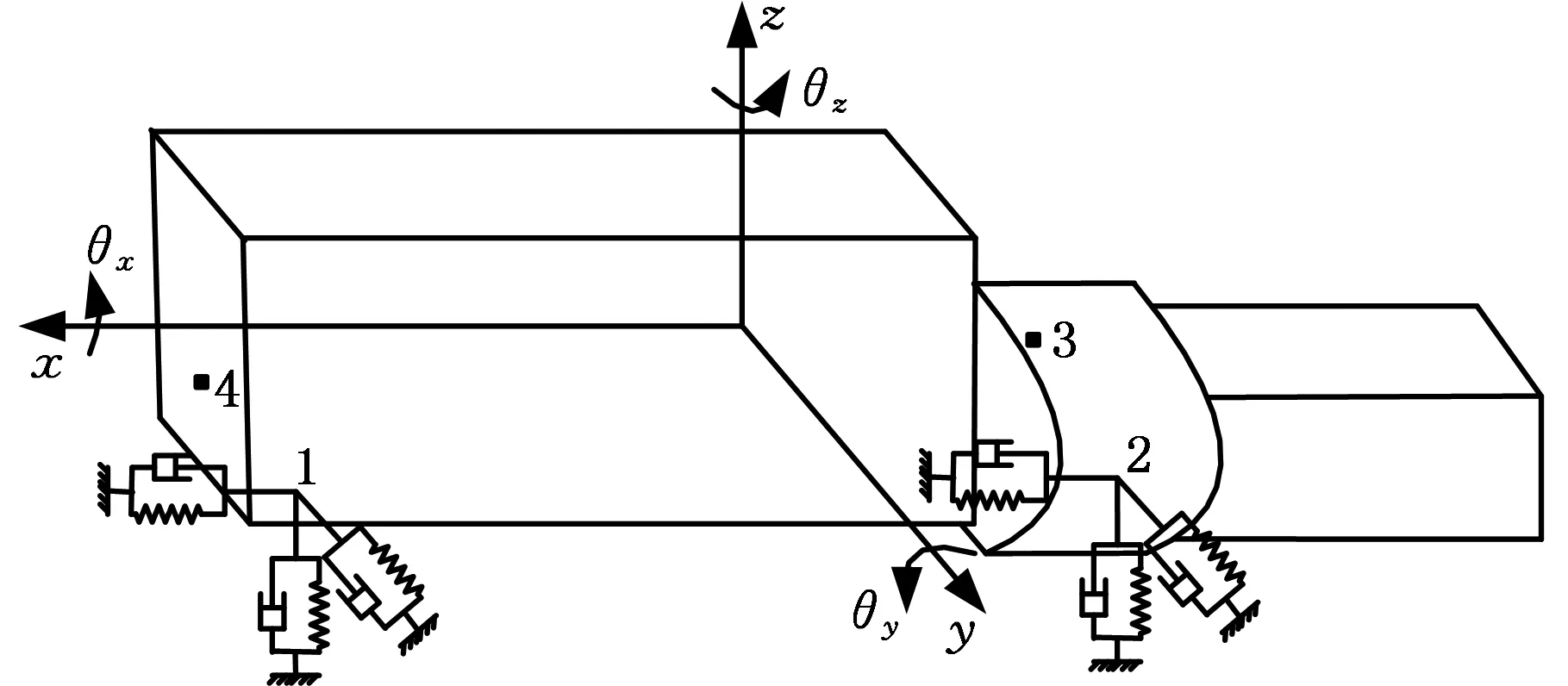
图2 动力总成悬置系统的六自由度模型Fig.2 The six degrees of freedom of the powertrain mounting system
表1和表2给出了动力总成系统的总质量m、质心坐标(x0,y0,z0)以及转动惯量和惯性积。表3所示为悬置元件的初始静刚度,一般为经验值。

表1 动力总成质量和质心位置坐标

表2 动力总成系统的转动惯量和惯性积
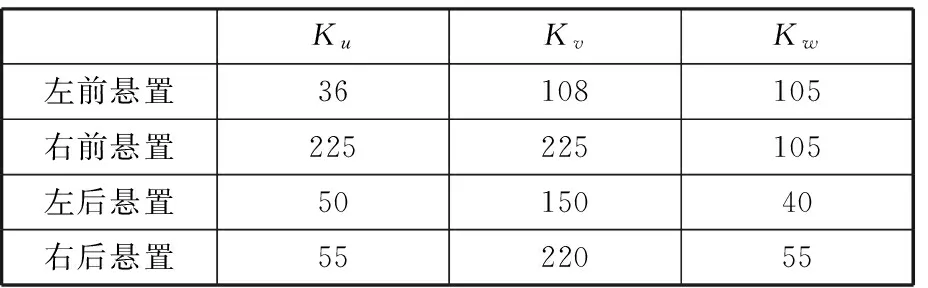
表3 悬置元件主轴方向初始静刚度
优化前悬置系统固有频率和振动解耦率计算结果如表4所示。由表4可以看出,各阶固有频率分布较合理,振动解耦率除x、z方向较理想外,其他方向振动耦合较严重,有待优化。
为减小计算量,选择其中灵敏度大的重要参数作为设计参数,可以用二阶响应面分析法或者最小二乘拟合法得到设计参数的精确表达式。
基于正交实验法进行悬置刚度灵敏度分析,左前悬置u向刚度和右后悬置u、w向刚度对悬置系统的垂向和侧倾方向解耦率都比较敏感,是系统解耦度设计指标的敏感因素,进行优化设计时应着重考虑,即将该3个不确定因素作为设计参数。表5所示为按照流程图中公式计算3个设计参数的插值点。

表4 优化前悬置系统固有频率和能量解耦率
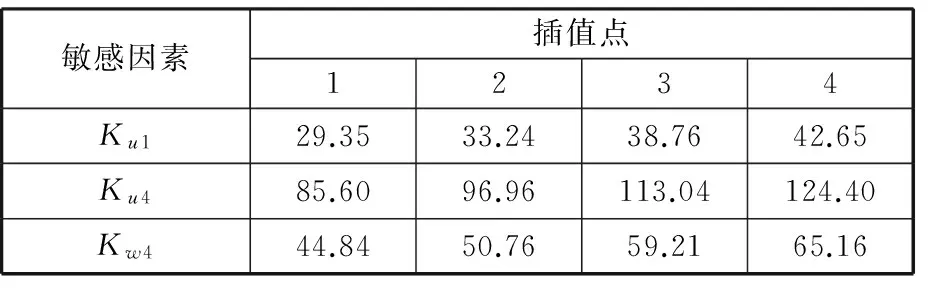
表5 Chebyshev插值点
为了避开该车其他部分的固有频率和其他激振引起的共振,取悬置系统6个固有频率的约束界限分别为5~18 Hz,9~16 Hz,5~18 Hz,6~15 Hz,10~18 Hz,10~18 Hz。
用Chebyshev区间分析方法和文献[5]中改进区间截断分析方法分别计算优化前固有频率和解耦率区间变动量,图3为部分模态方向解耦率区间的对比结果图。由图3可以看出,Chebyshev区间分析方法获得的区间结果包裹性明显更强,精度更高。图3同样说明了优化前系统的解耦率较小,且区间半径较大,表明该悬置系统性能的稳健性较差,需对系统进行优化设计,即进行悬置刚度的优化匹配。
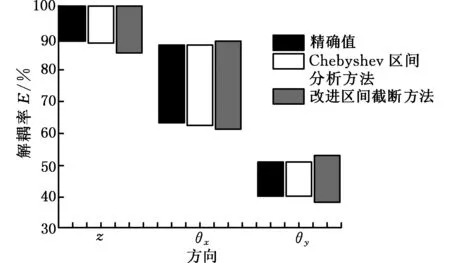
图3 优化前悬置系统部分解耦率的区间分析结果Fig.3 A part of the result of interval analysis of the decoupling ratio of the powertrain mounting system before the optimization
表6所示为优化后当确定性优化最优刚度值和Chebyshev区间优化最优刚度值发生波动时悬置系统解耦率和固有频率的变化区间。
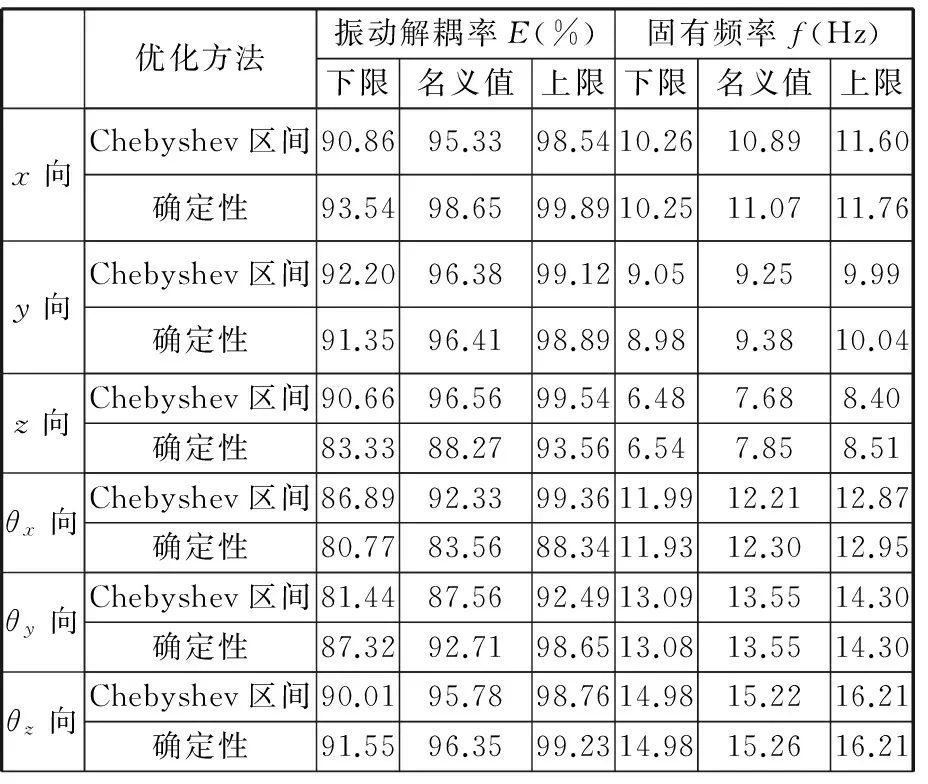
表6 优化后悬置系统解耦率和固有频率的变化区间
由表6可以看出,Chebyshev区间优化方法较大程度地提高了悬置系统的解耦率,在z和θx方向尤为明显。
由于在Chebyshev区间优化模型中考虑了解耦率的稳健性要求,所以不可避免地导致部分解耦率比确定性优化稍低。但Chebyshev区间优化方法的各阶固有频率区间范围更小,分配更合理,且Chebyshev区间优化方法固有频率的下限值更高、上限值更低,从而可以提高各频率约束条件的区间概率度,即稳健性。
表7给出了在确定性优化和Chebyshev区间优化最优刚度值处,文献[11]中所述的悬置系统频率约束条件的左右区间概率度。由表7可以看出,最优刚度值波动时,Chebyshev区间优化最优刚度值处的左右区间概率度均大于或等于确定性优化,且稳健性较确定性优化有较大幅度提高,在y方向尤为明显。
振动传递率能够较好地反映动力总成通过悬置传递给车身的振动量的大小,振动传递量大说明隔振效果差,反之则好。对优化前后的悬置系统,利用ADAMS软件可进行较为真实的振动仿真,从而实现分析比较。图4、图5所示分别为动力总成在怠速时,优化前后的悬置系统垂向和侧倾方向的振动传递率。
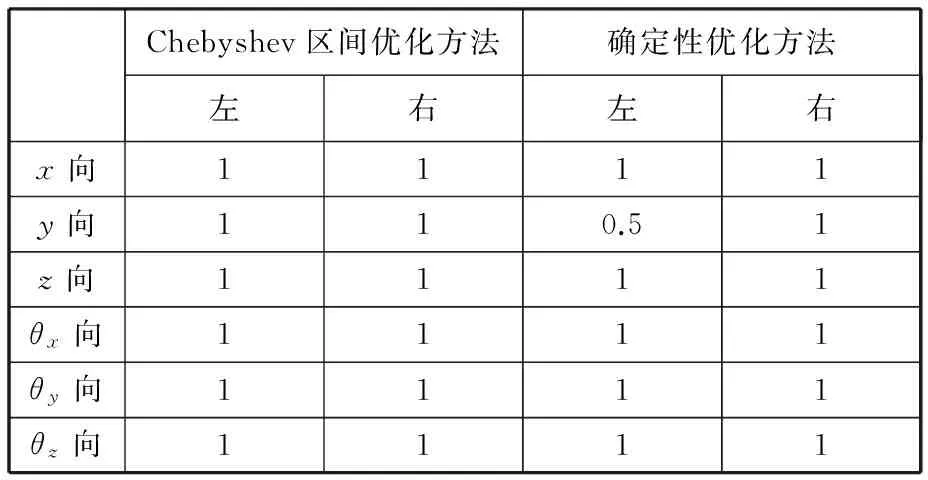
表7 优化后悬置系统频率约束的区间概率度Tab.7 The interval probability of the frequency constraint of the powertrain mounting system is optimized
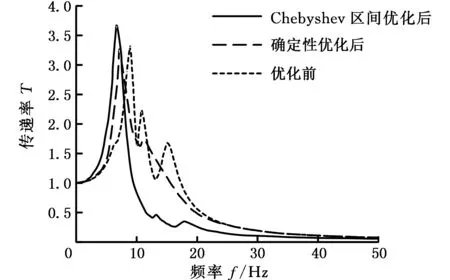
图4 优化前后垂向的振动传递率Fig.4 The vibration transfer rate of z-direction before and after the optimization
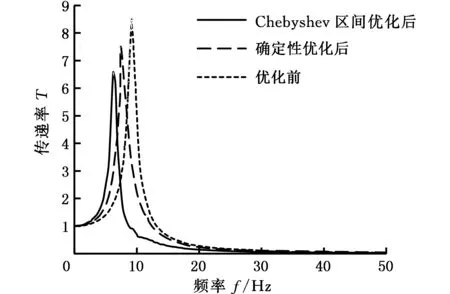
图5 优化前后侧倾方向的振动传递率Fig.5 The vibration transfer rate of the θx-direction before and after the optimization
由图4、图5可以看出,Chebyshev区间优化后悬置系统的振动传递率较优化前有较大改进。主要表现为:在垂直z方向上优化后系统振动传递率明显较优化前有所减小,振动传递率峰值所对应的频率也往低频方向有所偏移(即由8.9 Hz变为6.7 Hz),从而避开了悬置系统的固有频率,且怠速激励的系统振动传递率明显小于1,有利于系统隔振;同时,侧倾方向上的振动传递率也明显地减小。而确定性优化后悬置系统的振动传递率改进效果不明显,尤其是垂向上怠速激励下的系统振动传递率明显不小于1,这对系统的隔振不利。
可见,采用基于Chebyshev区间分析方法进行悬置系统参数优化后,振动解耦率、固有频率分配和振动解耦率均取得较满意的结果。
4 结论
(1)应用Chebyshev区间分析方法求解了悬置系统解耦率和固有频率变动范围。以高解耦率和解耦率变动范围最小为优化目标,建立优化设计模型,实例验证了该模型的可行性。
(2)Chebyshev区间分析方法只需不确定参数的变化范围,而不需要获得其概率分布,因此该方法相较于确定性方法更具有实际工程意义。
(3)Chebyshev区间分析方法误差小,扩张效应不明显,能更加准确地近似于真实区间。
(4)应用Chebyshev区间分析方法的优化模型不仅能够明显提高系统振动能量解耦率以及稳健性,还能有效改善敏感方向振动传递率。
[1] 吕振华,范让林.动力总成悬置系统振动解耦设计方法[J].机械工程学报,2005,41(4):49-54. LYU Zhenhua,FAN Ranglin. Design Method for Vibration Uncoupling of Powertrain Mounting System[J]. Journal of Mechanical Engineering,2005,41(4):49-54.
[2] 陈剑,史韦意,蒋丰鑫,等.考虑车内振动的动力总成悬置系统多目标优化[J].中国机械工程,2015,26(8):1129-1135. CHEN Jian,SHI Weiyi, JIANG Fengxin, et al. Multi-objective Optimization of the Powertrain Mounting System Concurrently Considering Energy Decoupling and Vehicle Vibration[J]. China Mechanical Engineering,2015,26(8):1129-1135.
[3] 徐石安.汽车发动机弹性支承隔振的解耦方法[J].汽车工程.1995,17(4):198-204. XU Shi’an. Vibration Isolation and Decoupling Technique of Engine-mount on Vehicles[J].Automotive Engineering,1995,17(4):198-204.
[4] 沈忠亮.汽车发动机悬置系统隔振技术研究[D].合肥:合肥工业大学,2015. SHEN Zhongliang. Research on the Vibration Isolation Technology of Automotive Engine Mount System[D].Hefei: University of Technology,2015.
[5] 吴杰,周胜男. 动力总成悬置系统频率和解耦率的稳健优化方法[J].振动与冲击,2012,31(4):1-7. WU Jie,ZHOU Shengnan. Robustness Optimization Method for Frequency and Decoupling Ratio of Powertrain Mounting Systems[J]. Journal of Vibration and Shock,2012,31(4):1-7.
[6] 吴杰,刘玉波.动力总成悬置系统频率和解耦率的区间分析方法[J].噪声与振动控制,2012,6(3):12-15.WU Jie,LIU Yubo. Interval Analysis for Intrinsic Frequency and Decoupling Ratio of Powertrain Mounting Systems[J]. Noise and Vibration Control,2012,6(3):12-15.
[7] 邱志平,王靖.不确定参数结构特征值问题的概率统计方法和区间分析方法的比较[J].航空学报,2007,28(3):590-592. QIU Zhiping,WANG Jin. Comparison of Probabilistic Statistical Method and Interval Analysis Method for Eigenvalue Problem of Structure System with Uncertain Parameters[J]. Acta Aeronautica et Astronautica Sinica,2007,28(3):590-592.
[8] QIU Z P,WANG X J. Comparison of Dynamic Response of Structures with Uncertain-but-bounded Parameters Using Non-probabilistic Interval Analysis Method and Probabilistic Approach[J]. International Journal of Solids and Structures,2003,40(20):5423-5439.
[9] WU J L,LUO Z, ZHANG Y Q,et al. Interval Uncertain Method for Multibody Mechanical Systems Using Chebyshev Inclusion Functions[J].Int.J. Numer.Meth. Engrg.,2013,95(7):608-630.
[10] 吴景铼.基于Chebyshev多项式的动力学不确定性区间算法研究[D].武汉:华中科技大学,2013. WU Jinglai. Dynamics Uncertainty Research Based on Interval Arithmetic Using Chebyshev Polynomials[D]. Wuhan: Huazhong University of Science and Technology,2013.
[11] JIANG C,HAN X,LIU G R,et al.A Nonlinear Interval Number Programming Method for Uncertain Optimization Problems[J]. European Journal of Operational Research,2008,188(1):1-13.
[12] 蒋尔雄,赵风光,苏仰锋.数值逼近[M].上海:复旦大学出版社,2008. JIANG Erxiong,ZHAO Fengguang,SU Yangfeng. Numerical Approximation[M]. Shanghai:Fudan University Press,2008.
[13] 陈国良,王煦法.遗传算法及其应用[M].北京:人民邮电出版社,2001. CHEN Guoliang, WANG Xufa. Genetic Algorithm and Its Application[M]. Beijing: Posts and Telecom Press,2001.
猜你喜欢
中学数学研究(广东)(2023年9期)2023-06-03 03:32:40
中学生数理化·八年级物理人教版(2022年9期)2022-10-24 07:03:48
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
大电机技术(2021年2期)2021-07-21 07:28:38
重型机械(2020年2期)2020-07-24 08:16:16
中国航海(2019年2期)2019-07-24 08:26:40
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27 06:31:48
现代机械(2015年1期)2015-01-15 03:07:54
中国神经再生研究(英文版)(2014年23期)2014-06-01 09:08:50
客车技术与研究(2014年3期)2014-03-20 14:34:54
