
一种改进条码尺编码的闸门开度测量方法
2018-02-28 02:53西秀秀孙久运汪云甲张新耐刘克强
测绘通报 2018年1期
西秀秀,孙久运,汪云甲,张新耐,刘克强
(中国矿业大学环境与测绘学院,江苏 徐州 221116)
闸门是水工建筑的重要组成部分,通常设置在取水输水建筑物的进、出水口等咽喉要道,通过灵活可靠地启闭来发挥它们的功能与效益,并维护建筑物的安全。随着国家水利水电事业信息化建设的大力推广,越来越多的水利工程运用各种高新技术成果建立自动化监控系统[1],同时对闸门控制精度及控制效果的要求也越来越高。闸门开度是指闸门底水封到底槛的垂直距离,对闸门开度的监测是闸门监控最基本的指标之一。传统的闸门开度测量速度慢、精度低、自动化弱[2],不利于实时控制闸门的闭合。近年来有学者提出利用计算机视觉进行闸门开度检测并制作基于图像识别的闸门开度仪[3],尽管其监控位移难度小,但仍存在测量精度低、鲁棒性不强等缺陷。
针对实时监测闸门开度的困难,本文结合条码尺测量精度高及计算机视觉监测难度小的优点,探索基于条码尺图像分析的闸门开度测量方法;并针对目前条码尺编码解码的缺陷,提出一种新的编码解码方式进行改进,最终完成一套实时闸门开度测量系统。目前,基于改进条码尺编码与解码方案的闸门开度测量方法在国内外水利水电工程应用中具有一定的先进性,可望产生较高的经济效益。
1 闸门开度测量中条码尺图像分析
在基于条码尺的闸门开度测量中,主要通过对摄像机采集图像帧进行处理,识别数字条码尺的码元信息及检定基线,提取条码尺特征值,解码操作继而得到闸门开度的位移信息。由于采用图像输入设备对条码尺图像进行采集,因此与传统的光电传感器的识别方法有所不同,对条码尺图像采集和图像识别是其核心内容,也是对条码尺进行解码的前提。条码尺图像采集和图像识别主要包括畸变校正、图像预处理、条码尺精确定位和误差处理4个步骤。条码尺图像分析流程如图1所示。
1.1 畸变校正
监控摄像头是图像采集的主要元件,其具有性能稳定、全天候拍摄、耗电量小等优点,但在实际应用中镜头或多或少都会发生畸变现象,而畸变在一定程度上可以带来更宽泛的视场角,因而在广角端畸变会变得更加明显。畸变会使物体失去原有的形状,对条形码的解码存在较大的干扰,影响其测量精度,因此需要建立监控摄像头的校正系统,降低畸变对图像的影响[4]。具体过程就是利用监控摄像头标定获得的内方位矩阵[5],建立一个几何纠正模型,根据该数学模型结合重采样技术,实现图像的畸变纠正(如图2所示),为实现精度解码奠定基础。

图2 畸变纠正流程
1.2 图像处理
数字图像处理即利用计算机处理数字图像[6],其主要内容包括对图像进行噪声去除、增强、复原、分割、特征提取等。在本文中,需要对复杂环境下的条码图像进行处理以识别和定位条码尺,基本思路是首先对条码图像进行色彩转换将其转化为灰度图,以减少内存的开支,再将条码图像进一步处理以提取条码范围进行解码操作。因此主要的处理内容有:图像灰度化、图像滤波、边缘检测、内轮廓填充及漫水补充,得到复杂环境下的完整条码尺。在进行图像滤波时采用中值滤波与双边滤波结合的二级级联滤波方式代替传统方式下的高斯滤波[7];根据条码尺的边缘信息将闭合的边界内部进行漫水填充,目的是使条码尺识别度更高,后期实现条码解码更加准确。
1.3 条码定位
在复杂的环境背景下,根据条码尺固有的特征能够快速准确地识别出条码尺是计算闸门开度的关键问题。条码定位技术[8]不仅限于条码识别技术,在编解码要求上具有更高的难度和复杂性,且到目前为止,相关研究文献较少。通过图像处理得到的二值图进行形态学膨胀处理,将区域内所含目标分别处理成完整的连通域,其中最大的连通域为条码区域。当含有条码信息的图像进入监测视场,即可自动定位当前条码的位置,进行条码的分析和解码。
1.4 误差处理
由于条码尺在安装过程中可能存在人为测量误差或由观测视角差异导致的条码尺倾斜,因此需要将条码尺存在倾斜情况考虑到解码过程中,使解码出的条码尺位移信息更加精确。在图像处理中边缘检测已计算出图像的边缘梯度及方向,结合条码定位区域,对区域内边缘角度统计并计算平均值,得到条码尺的倾斜角度,进而对条码尺进行倾斜校正。
2 改进三周期条码尺编码和解码
由于条码技术具有准确、快速、经济的特点[9-10],相对于旋转编码器具有极高的测量精度,因此利用条码尺进行闸门开度测量具有优势。传统的条码尺[11-12]在解码时采用码元所占像素个数计算宽度,识别码元所在周期,过程中像素个数识别差异导致码区判断误差,在精测值计算时引入垂直放大率[13]均会导致闸门开度测量精度较低。考虑到条码尺的优缺点,本文在原有编码方案基础上提出一种定量与定性相结合的方法改进条码尺,主要内容包括两点:一是定义起始码元长度为其余码元的2倍,以起始码元作为特征码识别周期;二是码元的特征值以码元中缝隙个数表示,代替以码元宽度表示的特征值,在进行解码时只要定性识别间隙的个数即可,充分利用间隙来存储信息。
2.1 改进条码尺的编码原理
条码尺设计基本原则是所有码区的编码唯一,为满足该条件,此处设立3个条码序列且每个序列内部所有元素各不相同,3个序列为
(1)
式中,A序列的所有元素作为起始码元,其长度2L是B、C序列中码元长度L的2倍。A、B、C3个序列均以码元中间隔出现个数作为特征值,其中缝隙长度和个数根据码元特征值进行设计:缝隙长度定义为黑色块元的一半,缝隙最大个数为码元特征值的最大值max,则此处间隔的长度大小Lgap为
Lgap=L/max+2max+2
(2)
Lb=2Lgap
(3)
从3个条码序列中各取一个码元顺序组成码区,共有K=x·y·z种不同的码区,再将不同的码区作置乱加密,将置乱加密后的编码序列存至条码尺高度信息—条码特征数据库,作为解码的参照基准数据,按照此编码方式的编码如图3所示。此编码中空白间隔大小必须满足光学分辨能力。
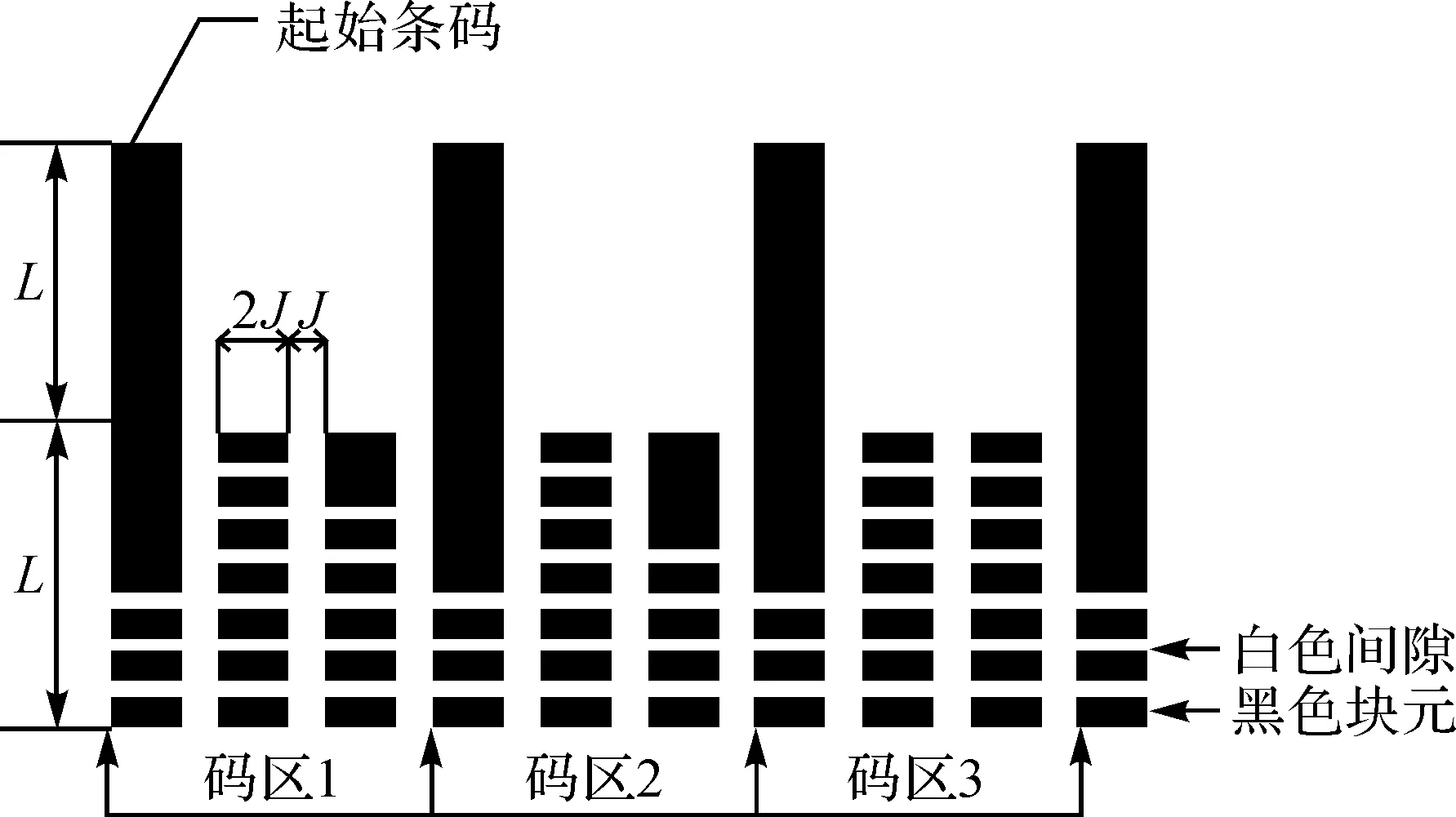
图3 改进编码方法示意图
2.2 改进条码尺的解码原理
由于条码尺的特征量是由码元上间隔数量所决定的,因此最重要的就是识别间隔个数,相比传统方式的计算码元宽度,采用定性的方式可以更加准确地求解特征量。因此本文采用定性与定量结合的方式求解。
粗测值是根据图像处理技术求解观测点所在码区内所有码元的间隙个数,进而得到该周期的码字,检索条码尺高度信息—条码特征数据库中对应的位移信息得出粗测值。根据图4所示,码元中黑色块元至空白间隙的变化次数就是特征值,但是由于起始码元的长度是其余码元的2倍,观察可知非起始码元的变化次数比起始码元多1,因此在计算特征值时必须减去该值,这样即得到该周期的码字。与条码尺高度信息—条码特征数据库检索分析找出对应的码字,计算实际粗测位移。
精测值通过观测点所在位置距离当前起始条码与下一周期起始条码的像素比,由式(4)可知精测值与实际长度的比例与像素比相同。
(4)
式中,a为标识点距离当前码区起始条码的像元个数;b为标识点距离下一码区起始条码的像元个数;Sk为条码尺高度信息—条码特征数据库中每个周期对应的实际长度。则精测值为

(5)
根据所求的粗测值和精测值,由式(6)即可计算出观测标识点的实际位移S的值。此时解码结束。
S=S粗+S精
(6)
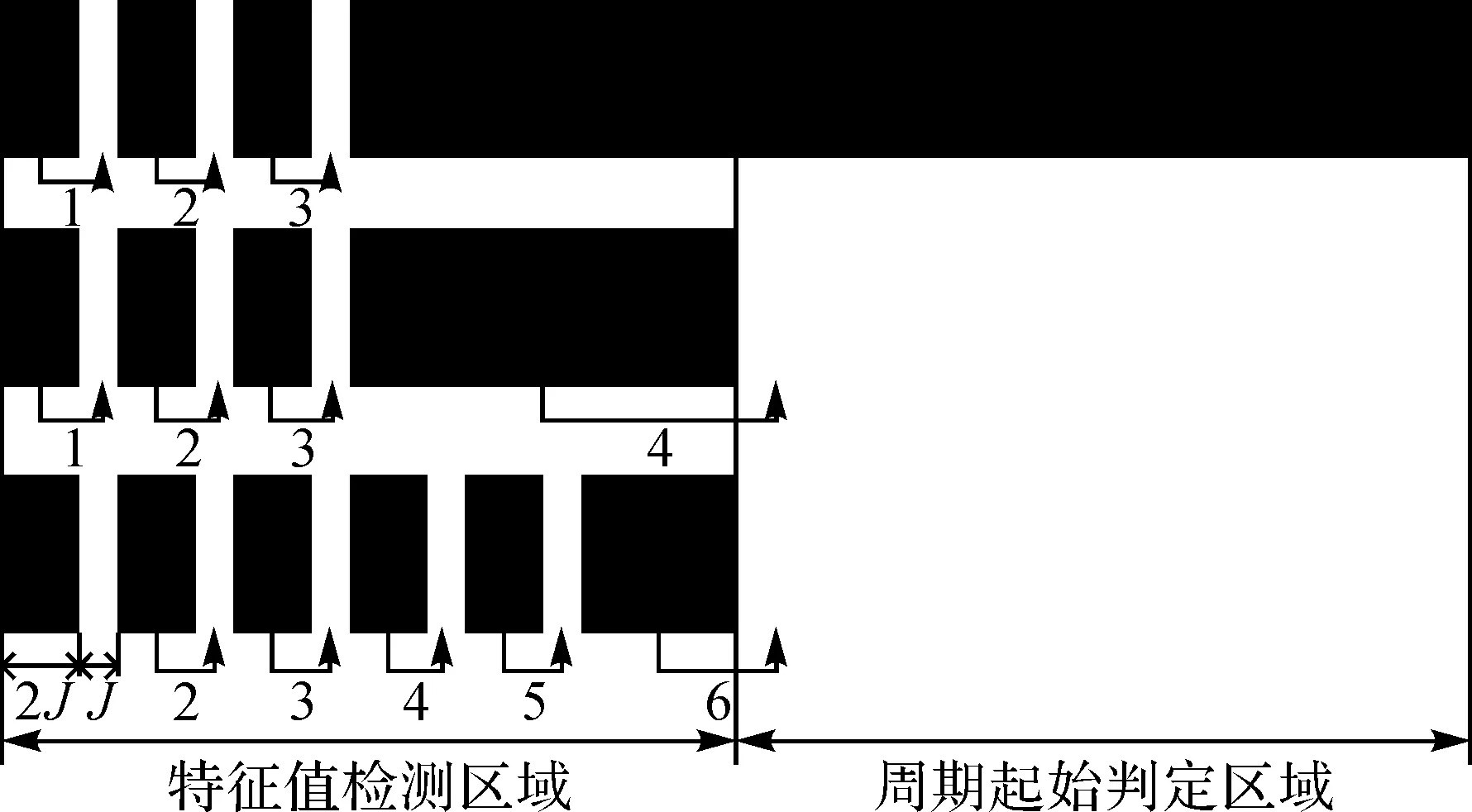
图4 改进条码的解码示意图
3 试验设计与结果分析
3.1 试验系统设计
为完成闸门开度自动测量,本文设计了基于条码尺图像分析的闸门开度测量系统,该测量系统组成与计算流程如图5所示,其主要分为3部分:视频采集模块、条码尺制作模块及开度测量系统模块。视频采集模块采集大坝闸门开度变化视频数据,同时将此数据通过网络传输到开度测量程序进行闸门开度的位移测量;条码尺制作模块将提出的编码规则用于制作周期各异的条码尺,并将对应的实际位移信息存储为“条码尺高度信息—条码特征”特征数据库;开度测量系统模块主要运用计算机视觉解译回传视频,识别与定位视频数据中的条码尺,提取监控点的空间位置特征,通过查询特征数据库检索监控点真实位置,最终完成闸门开度计算。
3.2 试验结果
通过模拟闸门启闭过程进行数据采集,对闸门开度测量系统进行测试,并结合其试验结果进行分析。
(1) 重复性检定。对本文设计的闸门开度测量系统来说,其重复性就是模拟闸门固定在某一位置处的情况下以相同的测量条件为前提,重复测量同一位置的条码位移,闸门开度测量系统能够测到相近读数的能力,即对固定位置处多次检定,本次试验设置至少三处固定位置,检测其测量值及误差。因此,整个测量过程必须在尽量短的时间内完成,以保证在相同的条件下进行测量,测量结果见表1、图6。

图5 闸门开度测量系统流程

cm
(2) 稳定性检定。在模拟闸门模型上设定4个固定位置监测点,在不同时间段内对监测点测量其闸门开度量数据见表2和图7,比较测量结果的极差(最大值与最小值之差,其代表在不同时间内的稳定程度)。
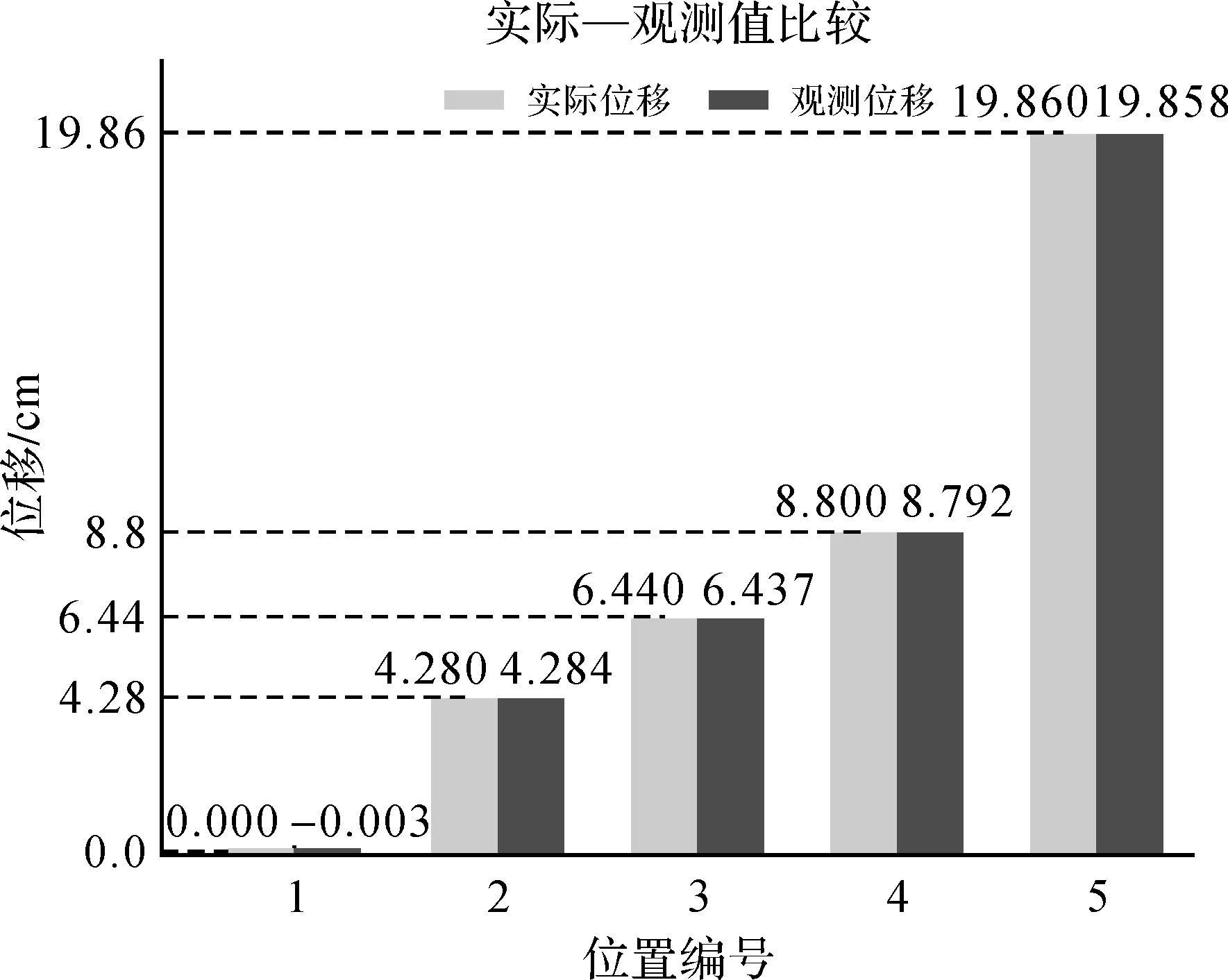
图6 重复性检定结果分析
3.3 试验分析
根据表1,对本文提出的闸门开度测量方法测量的闸门开度位移量与实际的闸门开度位移量进行误差分析,误差平均值为0.048 mm,方差为0.061 mm,表明其测量精度高,观察图6,表明系统测量精度不会随着位移的增加而变化;表2显示不同时间段内观测值最大极差为0.2 mm,结合图7表明系统在不同时间段内稳定性良好。由于各采样点之间的闸门开度的检测都是独立进行的,并且每次换算成实际相对位移量都是重新进行查表,因此不会产生累计误差。

表2 稳定性测试数据

图7 稳定性检定结果分析
4 结 语
本文提出的改进条码尺编码与解码方法能够改善三周期等间距编码的缺陷,采用基于改进条码尺图像处理的方式构建闸门开度测量系统进行闸门开度的计算,由计算机直接处理显示开度信息代替人工度数,实现了非接触远距离高精度观测,大大提高了闸门开度自动监控程度,减少了测量过程中的误差。试验表明,运用本研究方法的闸门开度测量系统的测量精度高、稳定性好。因此,本文方法可为以后闸门的运行、测量提供一种思路和解决途径。
[1] 朱静华.水电厂泄水闸监控系统的闸门集控功能设计与实现[D].南京:东南大学,2015.
[2] 肖志怀,张志学,王晓麟.旋转编码器在闸门控制系统中的应用[J].仪器仪表学报,2002,23(S1):97-99.
[3] 江显群,陈武奋,刘涛,等.一种基于图像识别的闸门开度仪:中国,CN106054949A[P].2016-10-26.
[4] WU W Q,SUN Z Q.Overview of Camera Calibration Methods for Machine Vision[J].Application Research of Computers,2004,21(2):4-6.
[5] 王东杰,张继友,马丽娜,等.基于自标定技术的相机内方位元素测试影响因素分析[J].测绘通报,2014(S1):89-93.
[6] 李晴.基于数字图像技术的闸门位移量自动检测研究[D].南京:河海大学,2007.
[7] 蒋先刚,张盼盼,盛梅波,等.基于级联与组合属性形态学滤波的模糊边界目标识别[J].计算机工程,2016,42(3):220-225.
[8] 张晓.光学成像条码定位理论研究及应用[D].南京:南京理工大学,2006.
[9] ZHANG W,LI D.Research on Shift Sequence Code in Barcode Positioning System[C]∥Informatics and Management Science V.London:Springer London,2013:183-190.
[10] 丹晖.条码技术与应用[M].北京:化学工业出版社,2006.
[11] 杨俊志.数字水准仪条码尺的编码规则及实例[J].测绘通报,2008(6):19-21.
[12] 向发廷,郭海军,杨俊志.条码水准尺编码原理及其检定方法的研究[J].测绘工程,2013,22(2):48-51.
[13] 钱金超.一种采用条码尺的高准确度位移测量应用研究[D].南京:南京理工大学,2015.
猜你喜欢
中国石油石化(2022年12期)2022-07-16
通信技术(2021年12期)2022-01-25
条码与信息系统(2021年1期)2021-12-05
导航定位与授时(2021年2期)2021-04-16
河北北方学院学报(自然科学版)(2021年1期)2021-02-25
雷达与对抗(2020年2期)2020-12-25
商品与质量(2020年46期)2020-11-26
条码与信息系统(2020年5期)2020-06-07
中国外汇(2019年19期)2019-11-26
家庭影院技术(2018年11期)2019-01-21
