
基于AD2S83的永磁同步电机转子位置检测电路设计
2018-02-21 10:02刘伟奇张玉玲皮利萍韩继文朱大宾
新型工业化 2018年11期
刘伟奇,张玉玲,皮利萍,韩继文*,朱大宾
(1.北京精密机电控制设备研究所,北京 100076;2.北京长征高科技有限公司,北京 100076)
1 概述
在采用矢量控制的永磁无刷电机交流伺服系统中,需要实时检测电机转子磁场矢量位置。获取转子磁场矢量位置的方法通常可分为有转子位置传感器和无转子位置传感器两类。考虑到航天伺服机构的高速、高精度、高稳定性要求,某电动伺服系统采用由高可靠旋转变压器构成绝对编码式转子位置传感器的方案。图1所示为以旋转变压器为核心的绝对编码式转子位置传感器的组成原理图。从图中可以看到,以旋转变压器为核心的转子位置传感器主要有4大组成部分:旋转变压器、旋变激励电路、旋变信号处理电路、输出电路。旋转变压器的输出是含位置信息的模拟信号,需要外加励磁信号,且必须通过旋转变压器-数字转换器(RDC)将其输出的模拟位置信息转换为数字信号,才可输入到DSP控制芯片。由于旋转变压器安装在电机转子上以获取位置信号,其输出电压等级为伏级,易受到等级为百伏级的电机电压的干扰,而位置检测电路离驱动电路较近,输入/输出信号线易受到高速开关器件的干扰,因此转子位置检测电路电磁环境较差。因此,旋转变压器输出信号线的抗干扰设计和转子位置检测电路的PCB布局设计是保证转子位置检测信号精度和准确性的关键。

图1 转子位置传感器组成原理图Fig.1 Composition scheme of rotor position transducer
本文在分析旋转变压器及其检测电路周围电磁环境的基础上,设计基于AD2S83和AD2S99芯片的旋转变压器电路方案,解决旋转变压器工作的电磁环境较差影响位置检测信号稳定性的问题,提高电机转子位置检测精度,获得准确的转子位置信号,实现位置和速度的闭环控制,提高控制驱动器的工作性能。
2 电机转子位置检测电路设计方案
针对某伺服系统应用的恶劣电磁环境和高位置检测精度要求,本项目着重提高电机转子的位置检测精度和稳定性进行设计方案,考虑转子位置检测电路的实用性、精度和稳定性进行设计和试验,以解决转子位置检测精度问题,且有利于该转子位置检测电路在其他电动项目中的推广应用。
旋转变压器安装在电机转子轴上,按照电磁感应原理工作, 采用正交的两相绕组,定、转子上都有绕组,彼此同心安排,互相耦合联系,主要用于角度位置伺服控制系统中,作为角度位置的产生和检测元件。旋转变压器初级励磁绕组(R1~R2)和两相正交的次级感应绕组(S1~S3, S2~S4)同在定子侧, 转子侧是与初级绕组和次级绕组磁通耦合的特殊结构的线圈绕组。当旋转变压器转子随电机同步旋转, 初级励磁绕组外加交流励磁电压后,次级两输出绕组中便会产生感应电势,大小为励磁与转子旋转角的正、余弦值的乘积。旋转变压器输入输出关系为:


式中:E0励磁最大幅值;X为励磁角频率;K为旋转变压器变比;H为转子旋转角度。由于旋转变压器的输出是含位置信息的模拟信号,又需要外加励磁信号,故必须通过旋转变压器-数字转换器(RDC)将其输出的模拟位置信息转换为数字信号,才可输入到单片机或DSP 等控制芯片。

图2 旋转变压器电气原理图Fig. 2 Electric scheme of the resolver
由于受到电机电压、电机轴负载变化等的影响,旋转变压器工作的电磁环境较差,导致旋转变压器的激磁信号和正、余弦输出信号幅值和频率均受到干扰,因此,设计中充分考虑其输出信号线的抗干扰设计和转子位置检测电路的PCB布局设计。
设计选择AD2S83作为RDC芯片。AD2S83是一种利用数字锁相技术,工作于II型伺服环的跟踪式RDC,其数字输出能以选取的最大跟踪速率自动跟踪轴角输入,没有静态误差。由于它在把旋转变压器信号转换为二进制数时,采用比率式跟踪方法,输出数字角只与正弦和余弦输入信号的比值有关,而与它们的绝对值大小无关,因此,AD2S83对输入信号的幅值和频率变化不敏感,不必使用稳定、精确的振荡器来产生参考信号,而仍能保证精确度,这是AD2S83最突出的优点。AD2S83转换环路中相敏检测器的存在保证了对参考信号中的正交分量有很高的抑制能力。另外,它抑制噪声、谐波的能力强。
2.1 基于AD2S83的电机转子位置检测电路设计
本文选择AD2S83作为旋转变压器至数字转换器,配合并行信号转串行信号芯片的使用,采用同步串行通信保证数据传输的可靠性。美国AD 公司推出的以BMOSⅡ工艺制造的并行输出芯片(如 AD2S80, AD2S83)功能强大,功耗低(300mW)。AD2S83 最突出的优点就在于它可由用户选择相应的参数来优化整个系统的性能,可通过选择外围电路决定其工作的分辨率、带宽和动态性能。AD2S83外围电路如下图3所示。输出分辨率最高可设置为16位,SC1,SC2均为高电平。此时,参考频率与闭环带宽的比率7.5∶1,选择C4=185.3 pF,C5=925 pF,R5=516 k,跟踪速率为16.25 r/s。高频滤波器的作用是消除直流偏置和减少进入到AD2S83信号中的噪声, 因为它们影响相敏检测器的输出。据此,选择R1=R2=15 kΩ,C1=C2=1100 pF。由于该高频滤波器对输入到相敏检测器的信号有3倍的衰减,因此,它会影响环路的增益。

图3 AD2S83工作原理图Fig. 3 Principle scheme of AD2S83
合适的R3、C3使信号在参考频率上没有明显的相位移,本方案中,R3=100 kΩ,C3=2.2 nF。
VCO的输入电阻R6用来设置变换器的最大跟踪速率。本方案中,R6=64 kΩ。C6=390 pF,C7=150 pF,R7=3.3 kΩ。
2.2 基于AD2S99的激磁信号及其驱动电路设计
本项目采用日本多摩川公司无刷旋转变压器TS2620N21E11,激磁信号为7 V,激磁频率为10 kHz。选用AD2S99为旋转变压器提供激磁信号,激磁信号为7 V,激磁频率为10 kHz;为了保证AD2S99产生的激磁信号和旋转变压器TS262N21E11的阻抗匹配,采用了OP279和甲乙类放大电路组合来提高驱动能力。驱动电路原理图如图4所示。
2.3 与DSP的通讯模式
设计中,为了提高位置信息传输的可靠性,转子位置信号采用SPI串行通讯模式传输到DSP中。AD2S83输出的数据为16位的并行数据,为了实现与DSP的SPI通讯,需要把AD2S83输出的并行数据转化为串行数据。并行数据转化为串行数据通过74HC165芯片实现。此款芯片只能转换8位数据,而本方案中设定AD2S83输出的数据为16位,因此需要将两片74HC165进行级联以实现16位并行数据转化为串行数据输出的任务。通过试验确定了时序、软件以及硬件各信号端的处理,硬件连接如图5所示。

图4 基于AD2S99的励磁信号及驱动电路原理图Fig. 4 Scheme of excitation signal and drive circuit based on AD2S99

图5 并行数据转化为串行数据的原理图Fig. 5 Scheme of parallel data transforming into serial data
旋转变压器励磁、解码电路与DSP控制板的接口采用一个插座对插和一个扁平电缆连接的形式。
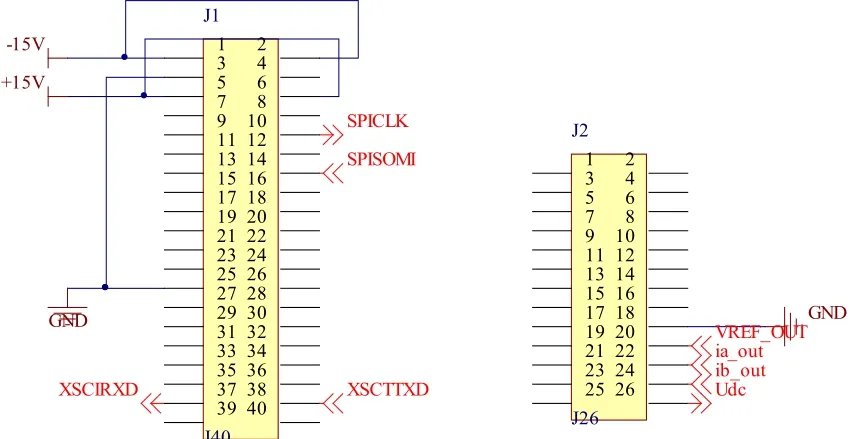
图6 旋变解码电路与DSP的连接Fig. 6 Connecting of resolver decoding circuit with DSP
2.4 电源变换电路
旋转变压器信号调理电路中,所需的电源主要有±12V/GND,±5V/GND,+3.3 V,由控制板提供的电源±15V/GND分别通过电源变换模块LM7812/7912、LM7805/7905和 TPS75733变 换而来,其原理图如图7所示。

图7 电源变换电路Fig. 7 Power transforming circuit
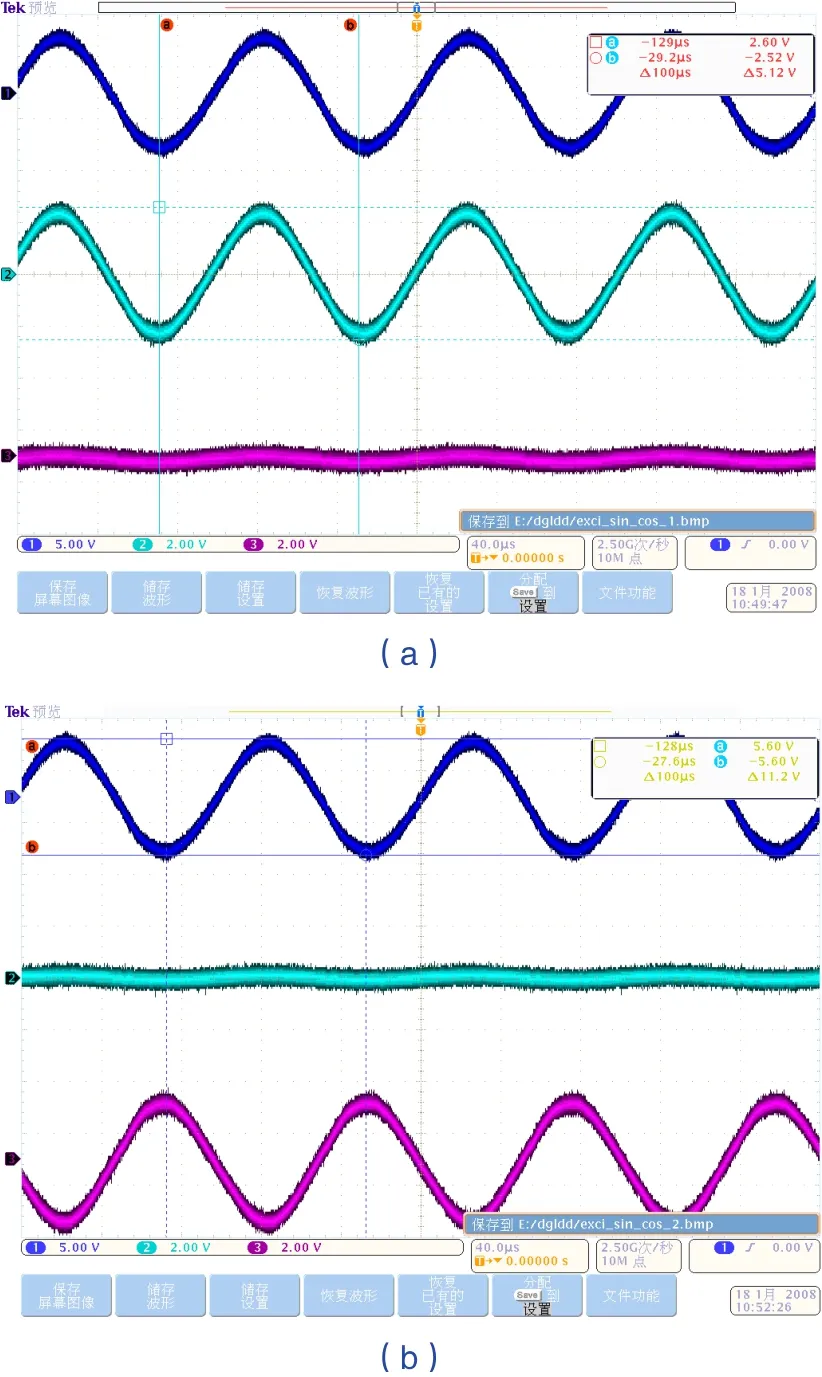
图8 旋转变压信号调理电路试验波形Fig. 8 Test waveform of the resolver signal conditioning circuit
2.5 电机转子位置检测电路的PCB设计和电路设计
为了保证电机转子位置检测电路的抗干扰能力,改进设计在PCB设计和电路设计中注意了以下几点:(1)首先对旋转变压器的正、余弦输出信号以及参考信号分别采用双绞屏蔽线,并用锡纸和铜网进行了屏蔽处理。(2)旋变的两个信号地应与其对应的信号线并行走线连到AD2S83的信号地管脚, 以减少正、余弦信号间的耦合。(3)在AD2S83/AD2S99/74HC165的各电源/地之间要分别并联100 uF (陶瓷) 和10 uF (钽) 的去耦电容, 且在布局上它们应尽量靠近AD2S83/AD2S99/74HC165放置, 各电源都应有自己单独的去耦电容。试验中发现电源的稳定性极大地影响转子位置检测信号的稳定性,应采用抗干扰性能好的电源模块为AD2S83/AD2S99供电。

图9 串行通讯试验波形Fig. 9 Test waveform of the serial communication
3 系统试验
根据以上对电机转子位置检测电路的改进,系统进行了相关的联调试验,联调试验结果如图8和图9所示。图8给出励磁信号波形、旋转变压器副边波形。图9给出busy信号、时钟脉冲、选通信号、串行数据信号的波形。由图中可以看出,数据信号波形光滑、品质好、毛刺少,抗干扰能力强,精度高。
联调试验表明,即使在电磁环境较恶劣的情况下,该改进电路仍然可以快速准确地读取位置信息,完全可以满足对转子位置和速度进行快速准确控制的要求,且尺寸小,适于小型化设计,成本较低,性价比高,工作可靠,使用方便,在高可靠性和高精度要求的交流电机控制系统中,具有较高的应用价值。
4 结论
本项目研究解决机电伺服系统控制驱动器的关键技术问题,设计的电机转子位置检测电路,有效地提高恶劣环境下转子位置信号的可靠性,并且提供可变精度(位置检测精度高速时为12位,低速时可达16位),为提高机电伺服系统的性能奠定了坚实的基础。其技术成果已成功应用于某电动伺服系统驱动器项目的研发设计中。
猜你喜欢
大电机技术(2022年3期)2022-08-06
商品与质量(2021年43期)2022-01-18
河北电力技术(2021年2期)2021-07-29
河北电力技术(2021年2期)2021-07-29
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
科学咨询(2020年53期)2020-03-19
商品与质量(2019年22期)2019-11-29
科学导报·学术(2019年44期)2019-09-10
通信电源技术(2018年3期)2018-06-26
电子制作(2018年1期)2018-04-04
