基于Arduino单片机的汽车并线辅助系统设计
2018-01-29 07:36李明娟
实验室研究与探索 2017年12期
李 明 娟
(滨州学院 飞行学院,山东 滨州 256603)
0 引 言
汽车并线辅助系统作为智能交通系统(ITS)的一个部分,在这几年逐渐地进入人们的视野中。随着汽车的普及,并线辅助系统也成为一个不可缺少的选装配置,该系统可以辅助驾驶员驾驶车辆并线,为驾驶员提供更加可靠地道路车流信息,极大地增加了汽车的道路行驶安全[1]。近年来,对汽车辅助驾驶系统的研发受到了世界各国的广泛关注,日本、德国和美国等国家都针对本国的人口、汽车数量和实际公路状况,对汽车辅助驾驶系统包括研发方向都做了规划[2-4]。
两车碰撞的事故可以划分成车辆追尾、车辆并线角碰撞和车辆并线侧方向剐蹭3种[5]。由于汽车反光镜存在着视觉上的盲区,导致了司机无法实时、正确地获得相邻车道中车辆的实时状态,所以车辆并线侧方向剐蹭就成为两车碰撞事件中事故率最高的一种。目前,汽车并线辅助系统在汽车中的装配比例非常小,新车已配备了汽车并线辅助系统功能的几乎没有。另外,现有汽车并线辅助系统只有灯光报警模块,驾驶员有时会因为光线问题,看不到灯光报警,导致并线辅助系统不够实用[6-8]。鉴于此,设计一款具有声、光警示和方向盘震动的汽车并线辅助系统就显得尤为必要。
1 系统组成及基本工作原理
1.1 系统组成
该系统主要由Arduino微处理器、电源模块、超声波传感器发射和接收模块、报警模块组成,其中报警模块包括LED模块、震动模块、蜂鸣器模块3部分。汽车并线辅助系统整体框图如图1所示。
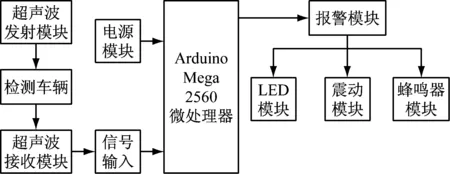
图1 汽车并线辅助系统整体框图
1.2 基本工作原理
本系统设计当驾驶员向左或向右拨动转向杆时才开启汽车并线辅助系统,以防出现盲目报警的情况,从而为驾驶员提供更准确的信息。当驾驶员拨动转向灯杆,系统启动,根据拨动转向灯杆的方向开启该方向的传感器。主控制中心单片机、传感器检测范围预先设定好,单片机在收到传感器检测到的后方车辆信号时,便进入软件判断流程,根据传感器判断的距离进行分级和声光报警。如后方有车队在另一条车道通过的过程中,通过不停的向主控制器发送检测数据来提醒驾驶员现在时刻不适合变道,单片机通过检测数据与内存的设定值进行对比之后得到准确的结果,并实现报警,并根据距离的等级给驾驶员不同等级的警报。
2 软硬件设计
2.1 系统硬件设计
2.1.1主控制器模块
该系统选用的单片机为Arduino Mega 2560,选择该款单片机的原因在于其容易操作和学习,价格低廉成本低,可以满足设计需要;该单片机最主要的优点就是拥有比较多的IO接口,数量多达54个,特别适合需要大量IO接口的设计[9-10]。本系统的设计需要超声波传感器模块的检测、报警模块的输出,所以Arduino Mega 2560单片机是汽车并线辅助系统的最佳选择。Arduino 2560单片机针脚图如图2所示。
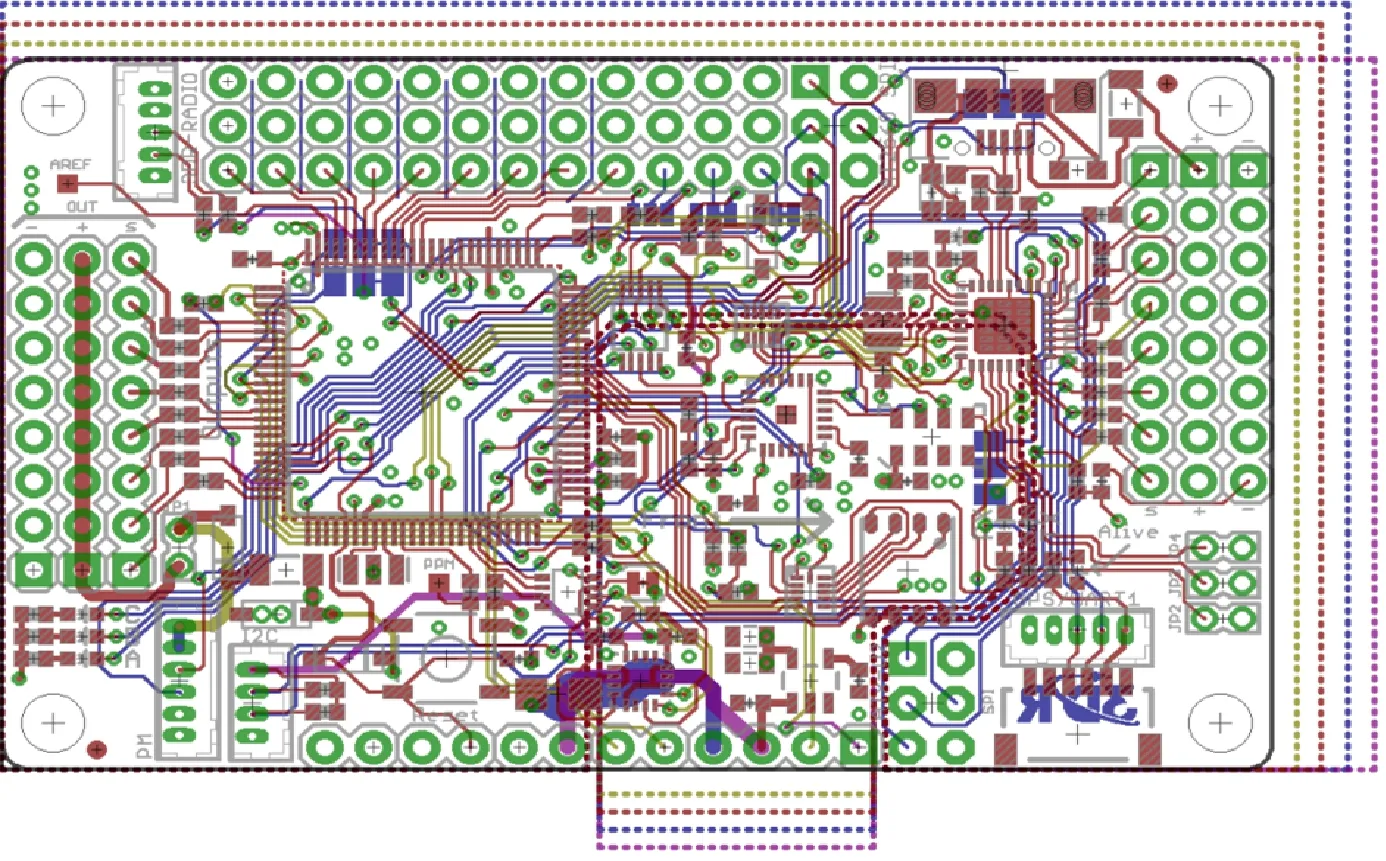
图2 Arduino 2560单片机针脚图
本设计选用的模数转换器为ADC0809。其工作原理是:将得到的编码进行锁存后,然后进行详细译码,从所有编码的信号中选择一个信号进行A/D转换。当A/D转换器开始工作的时候,首先要导出一个3位的地址编码,并伴随输出指示命令ALE=1,然后将前边保存的地址输入到ADC0809的地址锁存器中。这样,前边输出的编译码就可以从转换器中的8路模拟通道输入到其中的一个对比器中进行详细比较。当A/D转变成功后,会将编码由低电平转换为高电平,转换结束,并且将最终结果输出到Arduino Mega 2560单片机。
2.1.2传感器模块
本系统检测模块选择超声波测距模块(HC-SR04),该模块有超级敏感的环境补偿功能,极大地减少了由于环境温度变化造成的检测误差。HC-SR04应用二C的总线和单片机传输信号对单片机输出的二C命令开启自动接收模式,还可以对其他方向车道上汽车进行检测,非常简单,因此该模块占用单片机的信号资源和输入、输出接口的现象极大地减少[11-13]。因此,HC-SR04安装在汽车并线辅助系统中是较好的选择。HC-SR04采用非接触式距离检测方式,测量距离的精度可以达到3 mm。
2.1.3报警模块
报警模块主要由蜂鸣器模块、震动模块和灯光模块三部分组成。在汽车并线或者超车的过程中,若需要警示驾驶员,报警模块就能收到来自单片机的驱动信号,驱动蜂鸣器模块发声、震动模块震动和灯光模块由绿灯变为蓝灯或者红灯闪烁。当检测到与相邻车道侧后方的汽车距离大于提前设定的安全距离时,不做任何报警动作继续进行再一次的测量,这时驾驶员可以自由变道。当检测到与相邻车道侧后方的汽车距离小于提前设定的安全距离时,报警模块开始发出报警信号,即灯亮、声音、震动报警。根据两车距离的大小可以分不同的等级报警,即蜂鸣器模块的发声频率和灯光模块的颜色都不同。(1)安全模式:绿灯亮,无声音和震动;(2)缓冲模式:蓝灯亮,发声和震动频率低;(3)危险模式:红灯亮,发声和震动频率高。
2.2 系统软件设计
基于Arduino汽车并线辅助系统使用模块化的设计,程序直观方便易读,模块的功能通过不断地调用子程序模块来实现。设计的重点是对道路车流数据的采集和检测,判断是否有车辆进入盲区与危险报警的子程序。
为了减少误报率,提高系统的运行流畅度,本设计对道路中车流的状况进行多次的数据采集。根据接收到的数据信息和预设值进行比较。最后,单片机输出汽车是否能够变道的信号到报警系统。
2.2.1汽车并线辅助系统程序设计
软件部分的设计采用的方法是前后台多任务,本设计把超声波检测程序和报警程序分别写成两个部分,并设定低功耗运行模式,这样能够降低系统功耗,减少汽车电瓶频繁放点的次数,增加汽车电瓶的寿命。
系统运行首先是Arduino Mega 2560微型处理器启动并开始初始化配置[14]。系统总程序流程图如图3所示。当检测到相邻车道有车辆时,得到检测的数值,并且将提前设定的安全距离与测量的距离进行对比,当数值进入设定循环值时,进而就能够判断出是否需要启动报警模块,在视觉、听觉和触觉方面给驾驶员做下一步动作,从而做出参考。
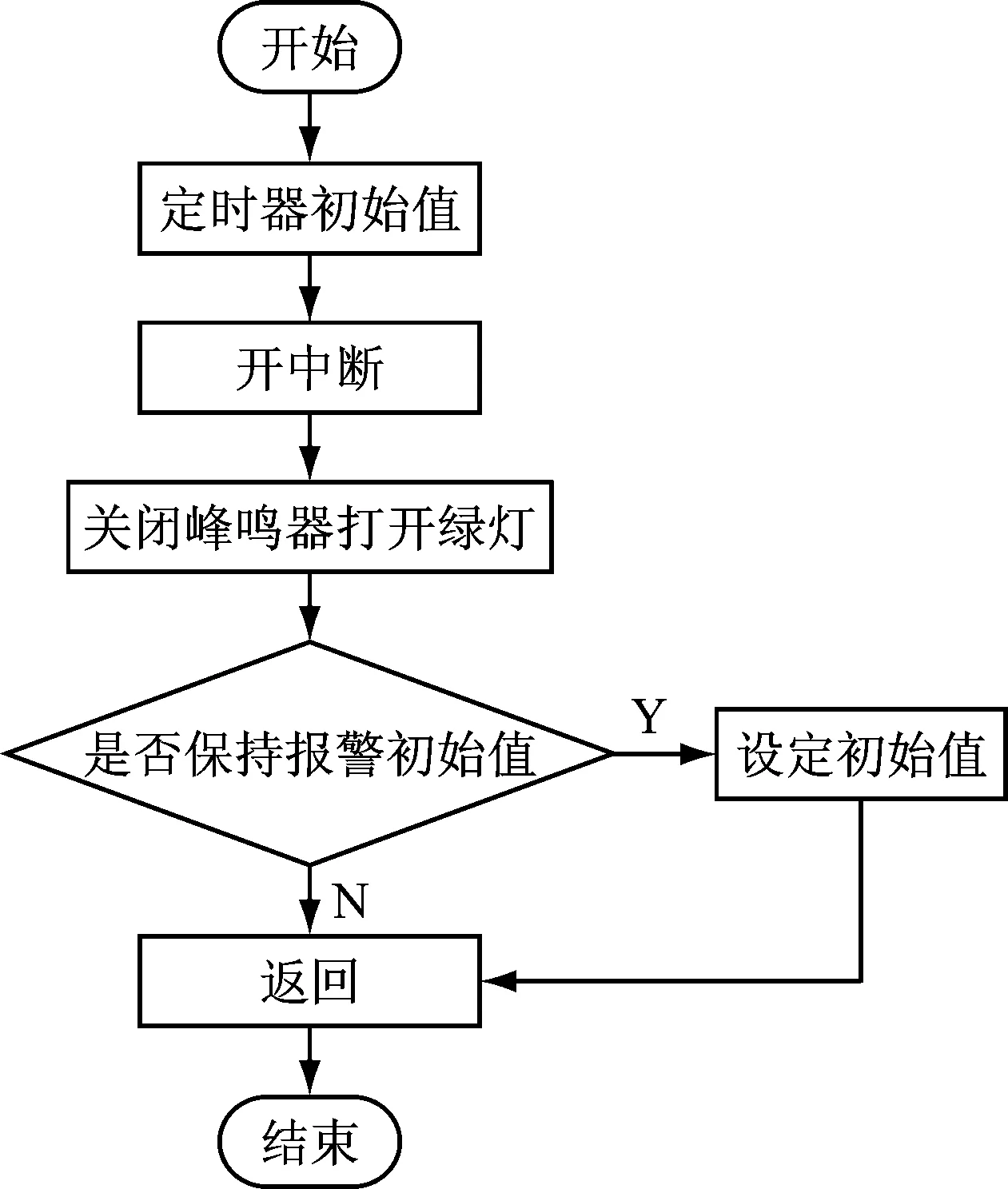
图3 系统总程序流程图
2.2.2主程序初始化流程
接通系统电源,首先运行定时器的预先设定,然后让系统停止工作,蓝灯闪烁、蜂鸣器报警、震动模块震动、超声波模块实时检测邻侧道路现场的车辆数据;最后关掉所有报警模块,并打开绿灯,完成主程序的初始化[15-16]。这时绿色LED灯发光,在这种条件下蜂鸣器和震动模块不作任何报警动作。主程序初始化流程图如图4所示。
3 实物功能测试
3.1 实物功能测试
基于Arduino单片机的汽车并线辅助系统实物图如图5所示。模拟道路路况进行实物功能测试,由于实物是根据汽车的尺寸按比例缩小的,所以测试的数据也是按比例缩小。当车辆正常行驶时,本系统不启动,拨动转向灯杆,系统启动并根据灯杆拨动方向启动该方向的超声波测距传感器,若检测到相邻车道的后方没有车辆行驶,LED灯绿灯亮,其它模块不报警,驾驶员可以自由变道或超车;若相邻车道有车辆,两车相距进入缓冲模式,LED灯蓝灯亮、蜂鸣器和震动模块报警频率低;若相邻车道有车并且两车距离进入危险模式,即有车进入视觉盲区,LED灯红灯亮,蜂鸣器响的频率高,震动模块震动明显,这时不能并线或者超车。
图4 主程序初始化流程图

图5 汽车并线辅助系统实物图
3.2 测试结果分析
由于现有汽车并线辅助系统只有灯光报警模块,驾驶员有时会因为光线问题,看不到灯光报警,导致并
线辅助系统不太实用。与现有的汽车并线辅助系统相比,本设计的3种报警模块同时报警避免了此问题,即不仅有灯光报警模块,还有蜂鸣器模块和震动模块。在实际运行中,各模块运行稳定和精确。
4 结 语
本设计应用了Arduino Mega2560单片机和HC-SR04超声波测距模块,使用自制汽车模型作为系统载体,并将系统安装在该模型上。通过对系统测试及运行,该设计稳定性高,结果较为精确。该系统还因价位较低,且可靠性较高,易于在市场推广,能满足汽车拥有者的需求。需要注意的是,汽车并线辅助系统并不能完全代替驾驶员判断路况,即使汽车安装了该系统,驾驶员仍然需要观察汽车的后视镜实时关注路况,保证行车安全。
[1] 陆明辉.奥迪Q7驾驶辅助系统之换道系统[J].汽车电器,2008(10):25-32.
[2] 肖质红.超声波测距仪在汽车安全系统中的应用[J].浙江万里学院学报,2007,20(5):43-46.
[3] 陈 勇.汽车防撞预警系统的研究与发展[J].交通管理,2006,23(12):239-243.
[4] Herrington D R.Ultrasonic range finder uses few components[J].EDN,1999(6):23-26.
[5] 罗文钧,张留宇,刘炳川,等.基于超声波的汽车并线辅助系统设计[J].科技视野,2015(15): 33-34.
[6] 奠石镁.超声波测距在汽车倒车防撞系统中的应用[J].电脑知识与技术,2007(4):1083-1085.
[7] 黄国全.汽车并线辅助系统指示灯的无线接收控制器及指示灯系统[P].中国专利:CN204623285U,2015-09-09.
[8] 王 雷.基于汽车的并线辅助装置、方法及汽车[P].中国专利:CN106218644A, 2016-12-14.
[9] Vertelney L.Using video to prototype user interfaces[J].ACM SIGCHI Bulletin.1989,21(2):57-61.
[10] 刘南君,毛培宏.基于Arduino Mega2560单片机的简易智能割草机器人的设计与实现[J].安徽农业科学,2012(36):17899-17903.
[11] 韩赞东.超声定位技术在汽车安全预警系统中的应用[J].测控技术,2002,21(8):10-14.
[12] 麦锦文.超声波技术在汽车防撞系统设计的应用[J].装备制造技术,2010(6):20-22.
[13] 帅 盼,张海宁,白 福,等.基于超声波测距的汽车倒车避障系统设计[J].国外电子测量技术,2016(10):54-57.
[14] 杨素行.模拟电子技术基础简明教程(第三版)[M].北京:高等教育出版社,2005.
[15] 余锡存.单片机原理及接口技术[M].西安:西安电子科技大学,2000.
[16] 赖寿宏.微型计算机控制技术[M].北京:机械工程出版社,2000.
猜你喜欢
疯狂英语·初中天地(2022年9期)2022-08-29
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年4期)2022-03-07
科学大众(2020年12期)2020-08-13
电脑报(2020年12期)2020-06-30
时代农机(2019年2期)2019-04-24
水电站设计(2018年1期)2018-04-12
中国公路(2017年18期)2018-01-23
汽车维护与修理(2016年10期)2016-07-10
公民与法治(2016年4期)2016-05-17