
基于创新能力的应用型人才培养的模型车设计
2018-01-29 05:05:25曹景胜闫丰雨
辽宁工业大学学报(社会科学版) 2017年6期
段 敏,曹景胜,金 浙,张 帅,闫丰雨
基于创新能力的应用型人才培养的模型车设计
段 敏,曹景胜,金 浙,张 帅,闫丰雨
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)
按照培养具有工程意识、动手实践能力和创新能力的应用型人才的目标,与理论教学紧密结合,科学地设置实验项目。基于摄像头的道路偏离自动调整模型车包括控制单元、摄像头、驱动和转向电机,由摄像头采集道路数据后送入控制单元进行分析并将输出信号送到驱动和转向电机,实现道路偏离的自动调整。在室内道路模型中,摄像头采集的是道路两侧的边界信号,通过二值化算法对图像进行处理,培养了学生的创新设计的能力。把理论与实际相结合,提高了学生的综合能力和团队协作精神。
创新能力;应用型;人才培养;设计
结合应用型本科的内涵和新能源车辆专业的特点,课程采用基于研究性教学方法,以应用型研究项目为核心[1],融合专业理论知识、实践能力和科研环节,重组知识体系、重构教学组织形式[2],依托于真实工程背景,在具体教学目标引导下,借助真实、虚拟或二者结合的工程项目对学生进行完整的工程训练。随着人工智能的逐渐兴起,无人驾驶技术也在不断发展,为避免无人驾驶汽车偏离正常行驶路线从而导致车祸的发生,道路偏离自动调整技术显得尤为重要。而且,道路偏离自动调整技术的核心——图像处理算法——也是实现无人驾驶的关键算法。道路偏离模型车包括机械部件、电路控制部分和传感器、32位控制芯片、摄像头、电机等,能够实现在室内模拟道路环境下实现道路偏离自动调整。
一、机械结构的设计
道路偏离自动调整模型车使用的机械模型采用了塑料底盘和车架、橡胶轮胎,前桥是转向桥,采用以舵机为转向器的转向机构,并采用双横臂式独立悬架,后桥是驱动桥,采用双电机和轮边减速器,未安装模块(核心控制模块、摄像头采集模块、电机驱动模块、转速采集模块、串口通信模块等)的模型车,如图1所示。在对前桥的调整过程中主要是对主销后倾角、主销内倾角、前轮外倾角和前轮前束的调整。通过调节螺钉旋入的深度和增减调整垫片的个数来使主销后倾角保持在6°左右,主销内倾角保持在5°左右,前轮外倾角保持在3°以内,前轮前束保持在3mm以内。
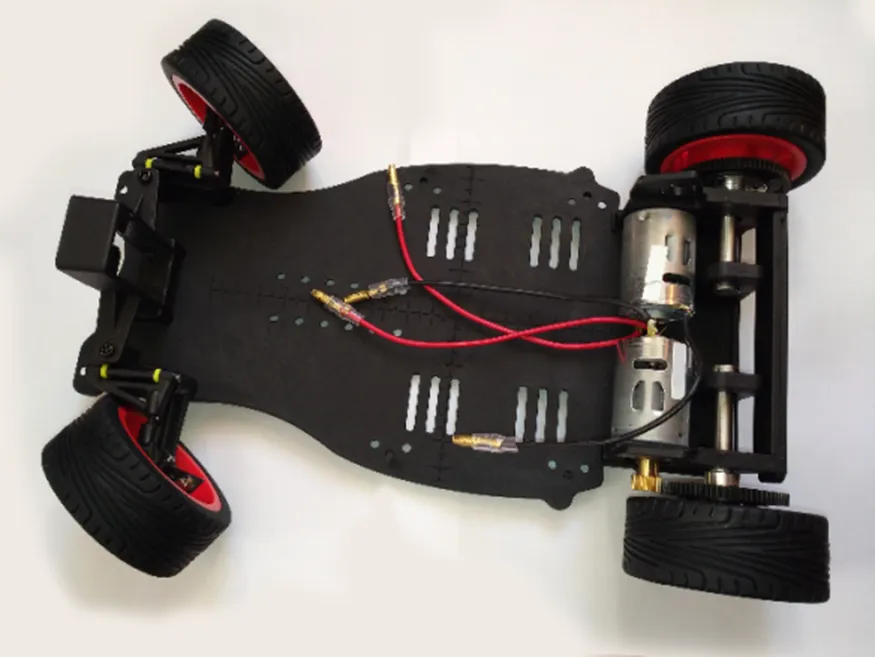
图1 模型车
由于所使用的摄像头的视角范围(90°)限制,如果按正常人驾驶轿车时的人眼高度来安装摄像头,那么采集图像的可用区域将缩小,而且不能发挥摄像头的最大功用,将摄像头抬高一个车身的高度,并通过轻质塑料管与底盘固定,这样不仅增大了摄像头的有效图像面积也扩大了视野。在调整模型车机械结构的过程中,学生使用组合螺丝刀、冲击钻等工具对模型车进行改造,学会熟练使用工具的能力,也培养了在实践过程中细心操作的能力。
二、电路板的制作
电路板的制作在Altium Designer环境下完成,整个工作包括绘制原理图和导出到PCB。
(一)原理图的绘制
绘制原理图简单来说就是画电路图,将各个模块、芯片、电源连接起来。原理图可分为三大部分:电源模块、电机驱动和模块接口。各个模块所需要的电压不同,例如,芯片需要的电压是3.3V,舵机和摄像头需要的电压是5V,双电机驱动电路需要的电压是12V,如图2所示。

图2 电源管理
根据各个模块所需要的电流选取变压芯片后绘制成原理图如图3,图4,图5所示。
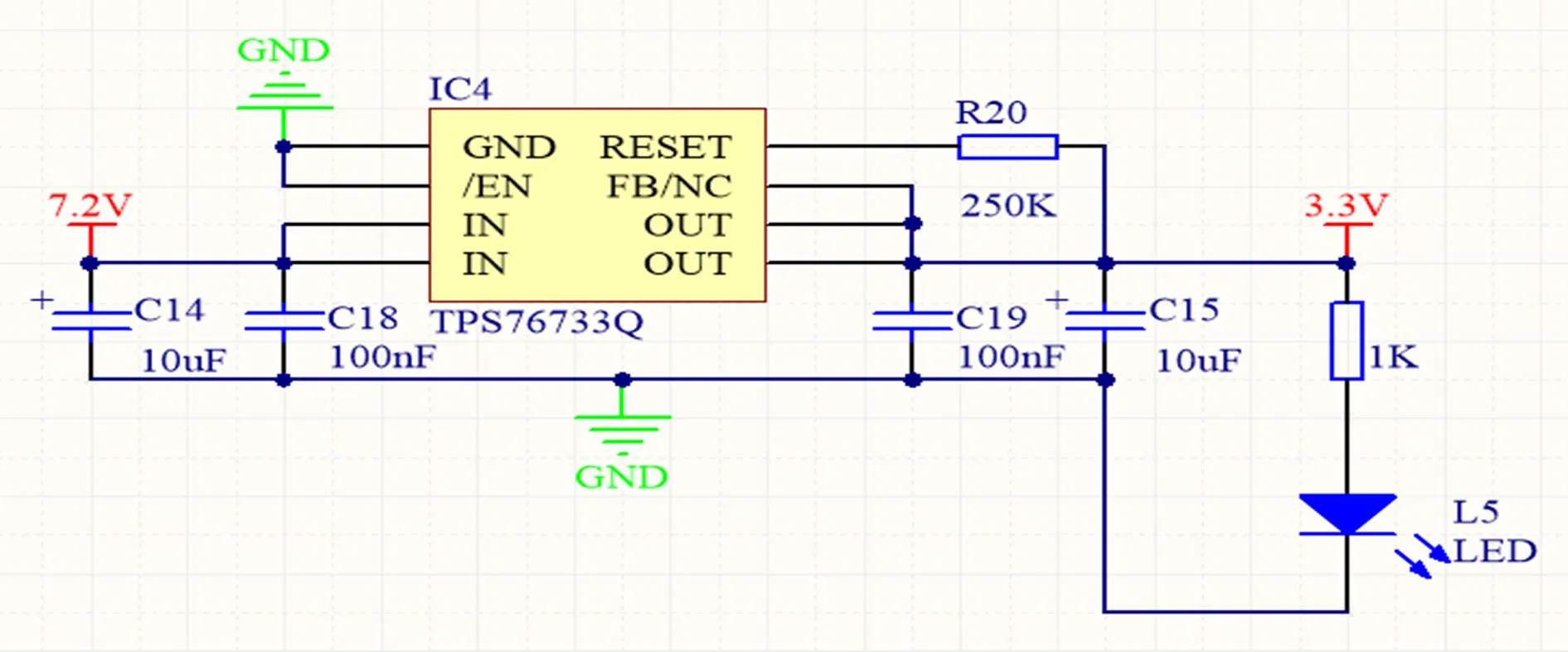
图3 3.3V降压模块
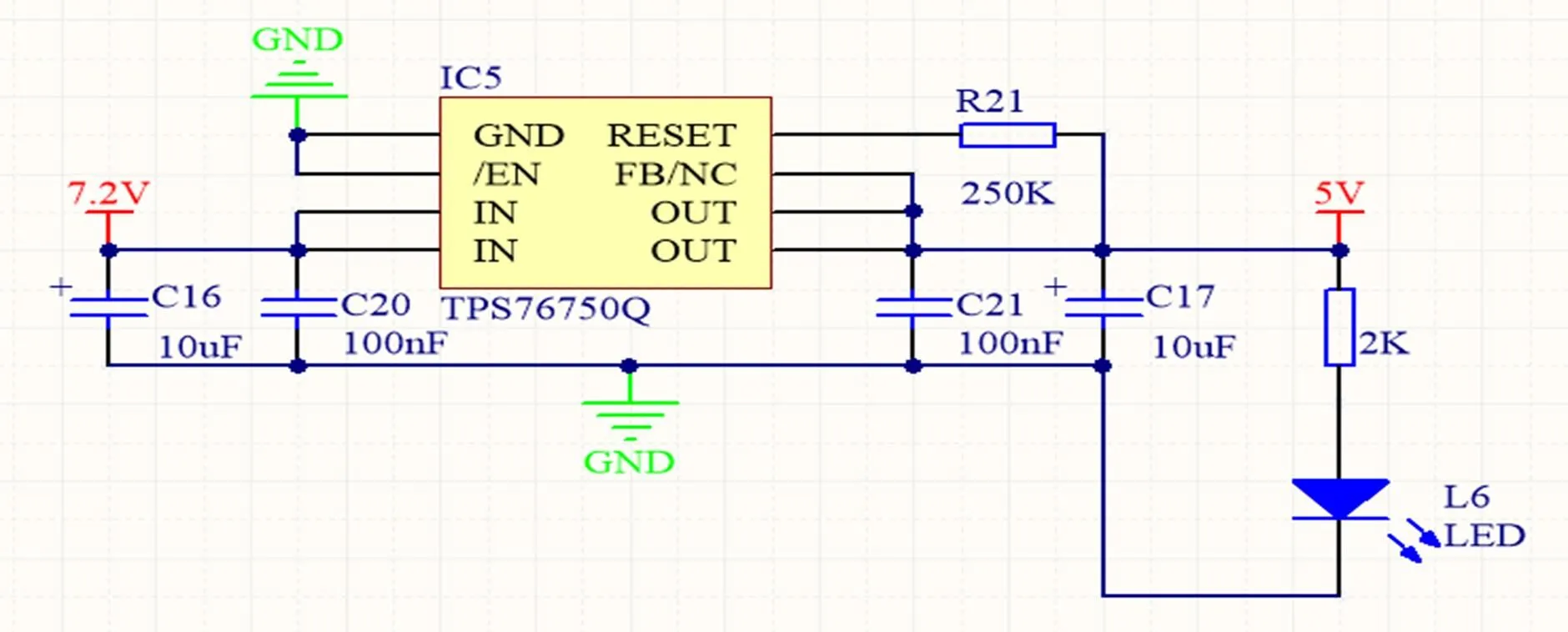
图4 5V降压模块
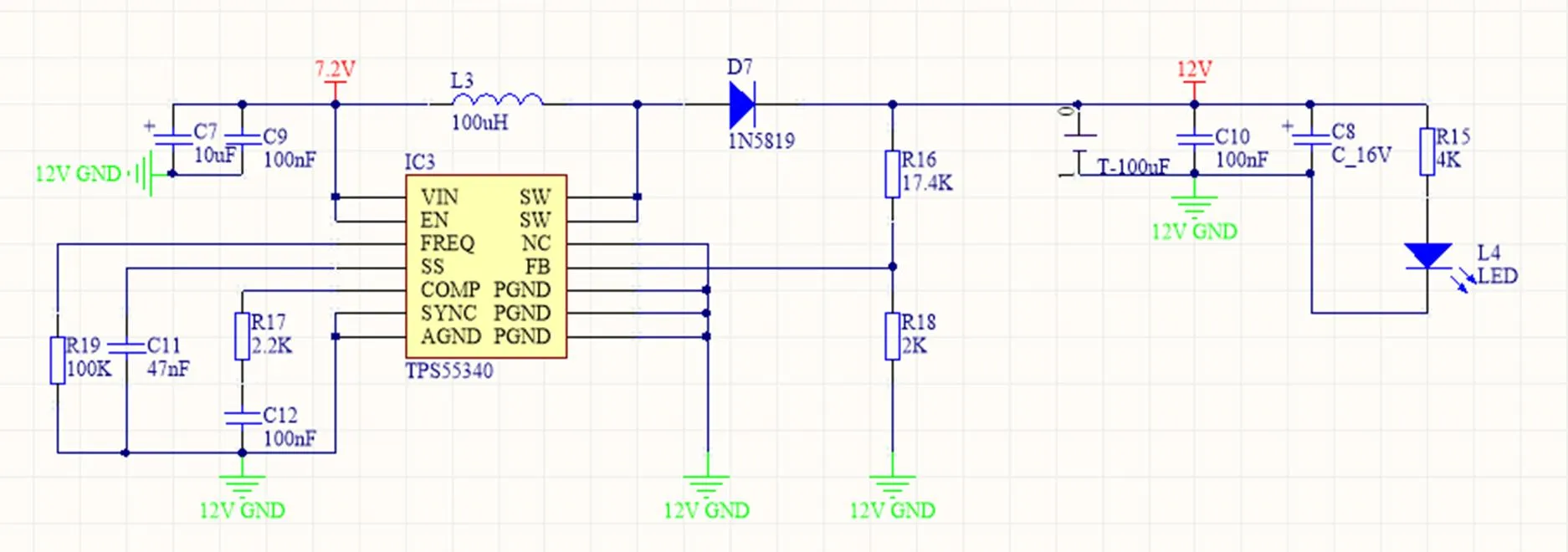
图5 12V升压模块
双电机驱动部分由两个半桥芯片构成全桥电路,使得模型车能够前进后退。在转向过程中由于内外两侧车轮存在转速差,需要对内外车轮单独进行控制,单个电机驱动如图6所示。
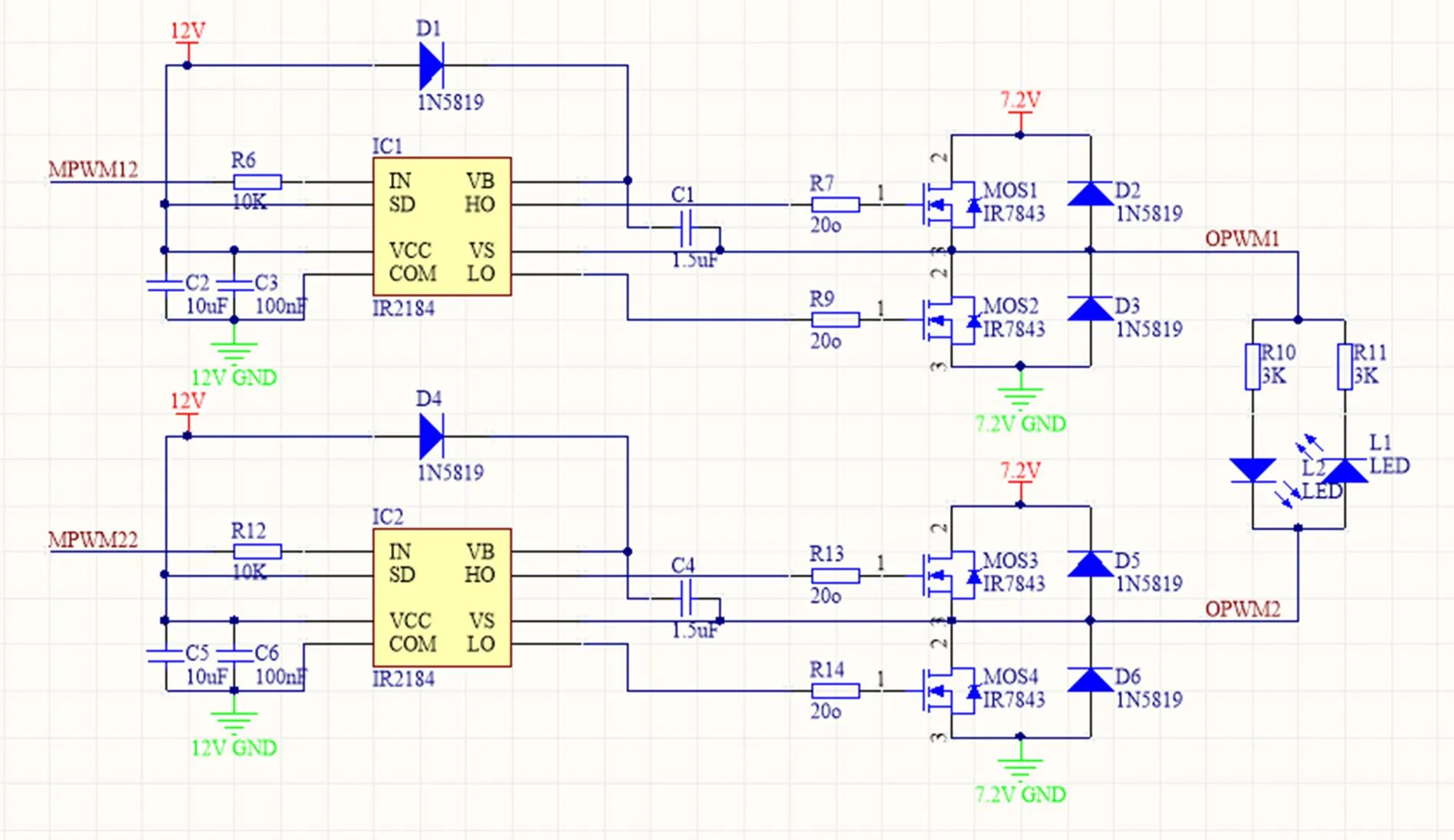
图6 单电机驱动电路
(二)PCB板的布局
原理图绘制完成后将原理图导出到PCB开始进行PCB的布局,在PCB布局时只需注意低压部分需要共地,电机驱动部分原理芯片等控制器件,正反两面的信号线避免相互平行等基本PCB布局要求即可。初代PCB如图7所示。
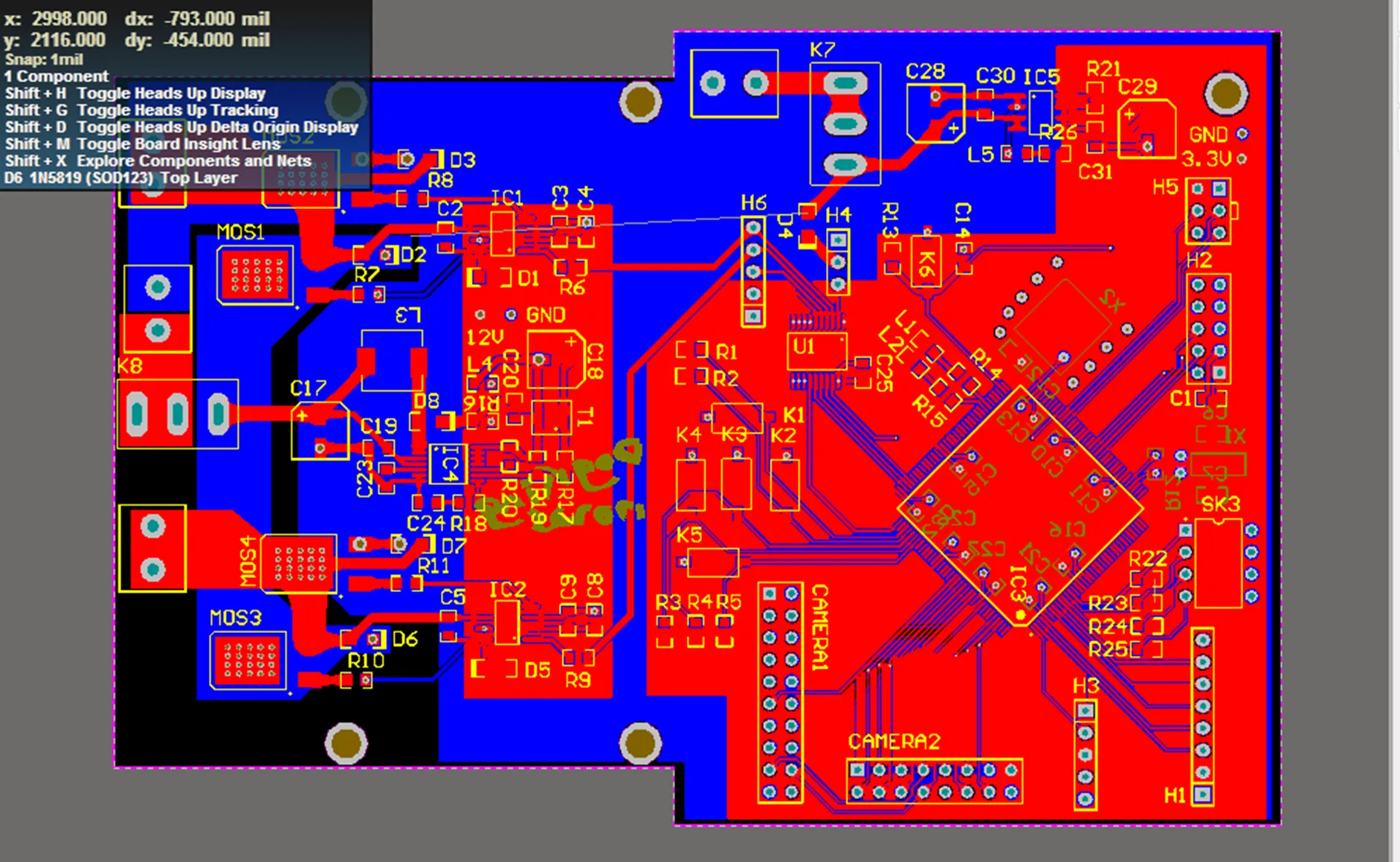
图7 初代PCB
在绘制PCB的过程中通过对各个电路模块有充分的了解,锻炼了学生处理复杂任务的能力,而且PCB并非画完一次就能解决问题,需要在实验中不断发现问题,这些都培养了学生发现问题和解决问题的能力。
三、道路偏离自动调整算法
算法作为程序运行的核心要素,对程序的稳定性和实时性起着决定性作用[3]。本文中的模型车采用的控制算法主要包括两个部分:图像处理和电机控制。算法程序流程图如图8 所示。
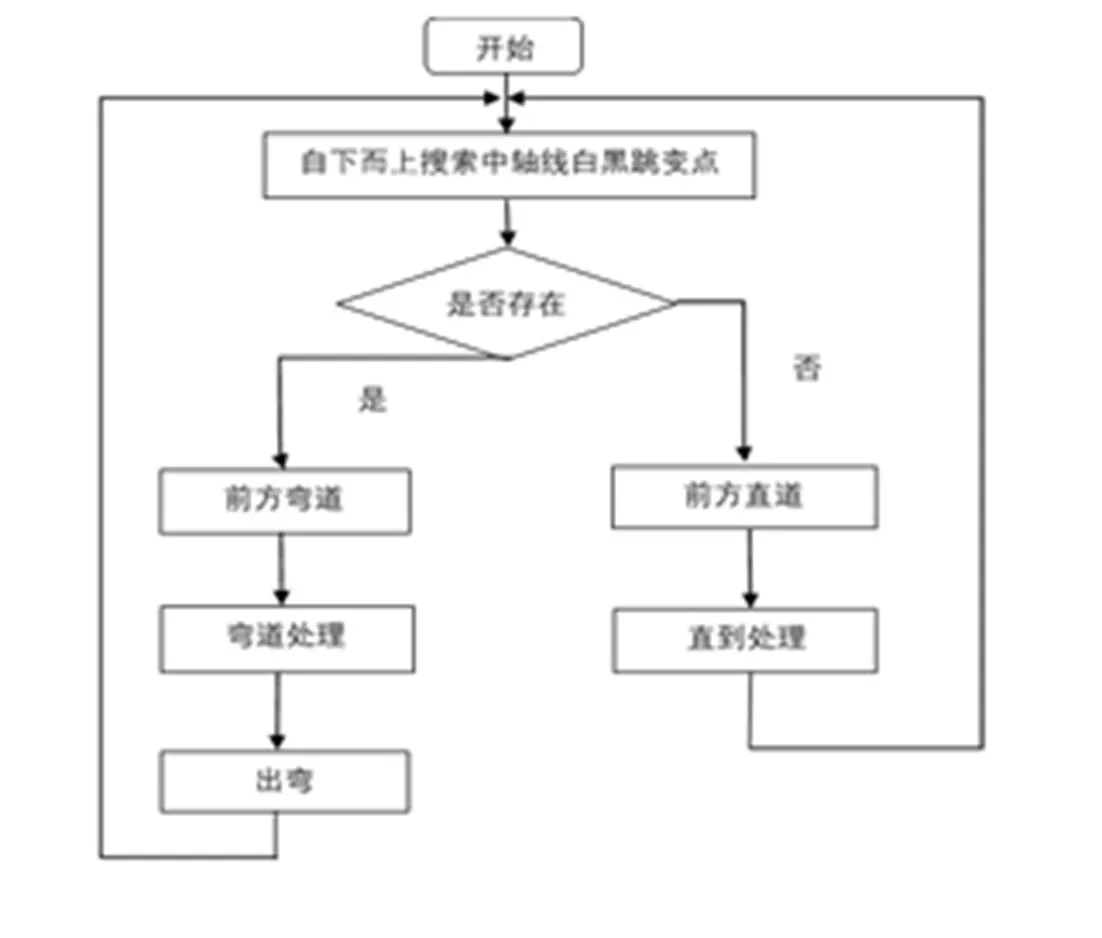
图8 算法流程图
本文利用白色PVC板作为路面,在板上粘贴黑色胶带作为道路边缘。在实验室环境下,道路信息较为理想,因此仅需辨别道路两侧的黑色胶带即可确定道路信息,由此确定图像处理的算法为图像二值化算法[4],即将采集后的图像灰度数据与预先设定的阈值相比较,区分出黑色胶带和白色PVC板,黑色胶带处的像素数据二值化后为0,白色PVC板处像素数据二值化后为1。由于采集到的初始图像噪点较多,二值化后得到的图像如图9,图10所示,

图9 二值化后的弯道图像

图10 二值化后的十字路口图像
模型车首先需要判断车体当前所在道路的偏移量,通过遍历图像两侧找到白黑跳变点,如图11所示。
再比较两跳变点的纵坐标之差即可确定车体当前偏移量,然后将偏差换算成舵机的转角信号发送给舵机。

图11 图像两侧白黑跳变点
模型车接着需要判断前方道路元素,即是直道、弯道还是十字道。判断程序如下[5]:
if (!RoadMod1)
{
DotU = 0;
jpL = 0; jpR = 0;
for (i=DATALINE; i>0; i++)
{
if (!ADdata[i][DATALINE/2]) DotU = i;
break;
}
if (DotU>0) RoadMod1 = 2;
else RoadMod1 = 1;
if (RoadMod1 = 2)
{
for (i=DATALINE; i>0; i--)
{
if (!ADdata[i][0]) jpL++;
break;
}
for (i=DATALINE; i>0; i--)
{
if (!ADdata[i][DATACOUNT]) jpR++;
break;
}
if ((jpL == 2) || (jpR == 2)) RoadMod2 = 1;
if ((jpL > 2) || (jpR > 2)) RoadMod2 = 2;
}
}
else
{
if (RoadMod1 ==1)
{
FTM_CnV_REG (FTMx[FTM2], CH1) = Angle;
}
DotL = 0; DotR = 0;
if (RoadMod1 ==2)
{
if (RoadMod2 ==1)
{
for (i=DATALINE; i>0; i--)
{
if (!ADdata[i][0])
DotL = i;
}
for (i=DATALINE; i>0; i--)
{
if (!ADdata[i][DATACOUNT])
DotR = i;
}
if ((DotL > DotR) && (DotL >= DATALINE * 0.8))
FTM_CnV_REG (FTMx[FTM2], CH1) = RightMAX;
if ((DotL > DotR) && (DotL >= DATALINE * 0.8))
FTM_CnV_REG (FTMx[FTM2], CH1) = LeftMAX;
}
}
}
程序的思路是,由下至上遍历图像中间轴线,如果不存在跳变点则说明前方直道;若存在跳变点则前方弯道,再由下至上遍历图像两侧,若一侧跳变点数为2,另一侧为0,则说明前方弯道;若两侧跳变点数都大于2,则说明前方十字道。在直道和弯道交界处,舵机由中间位置转向弯道方向,出弯后恢复中位。算法的编写对学生的逻辑思维能力是一个很大的挑战,而且程序的调试考验的不仅仅是编程能力,更考验的是学生的耐心和毅力,对学生理性思维的锻炼有很大帮助。
四、结束语
在模型车的设计过程中,从硬件的设计到算法的改进,借助多种专业软件如Altium Designer、IAR Embedded Workbench等,综合跨学科知识、团队努力、指导教师的经验对模型车进行优化设计,让学生在实践中加深了对理论知识的理解,提高了动手能力。
[1] 屈敏, 张雨, 赵建华. 车辆工程专业新能源汽车内涵方向实验教学的改革与实践[J].中国现代教育装备, 2013(21):54-57.
[2] 罗永革,冯樱,王保华,等. 车辆工程应用型本科大学生工程素质培养模式的创新与实践[J]. 湖北汽车工业学院学报, 2009,23(3): 72-75.
[3] 陈庆强,汤龙梅,蔡文培. 基于摄像头的智能车路径识别与方向控制算法[J]. 福建工程学院学报, 2015,13(3): 229-234.
[4] 于兵,张为公,龚宗洋. 基于机器视觉的车道偏离报警系统[J]. 东南大学学报: 自然科学版, 2009,39(5): 928-932.
[5] 张军.AVR单片机应用系统开发典型实例[M].北京:中国电力出版社,2005: 56-150.
(责任编校:付春玲)
2017-03-14
辽宁工业大学校级教改项目(2016009)
段敏(1963-),女,辽宁锦州人,教授。
10.15916/j.issn1674-327x.2017.06.026
G642.44
A
1674-327X (2017)06-0090-05
猜你喜欢
中国交通信息化(2022年9期)2022-10-28 06:14:40
辽宁丝绸(2022年1期)2022-03-29 00:59:06
汽车工程师(2021年12期)2022-01-18 06:02:43
四川工商学院学术新视野(2020年1期)2020-07-24 09:04:54
科学咨询(2020年53期)2020-03-19 07:41:46
商品与质量(2019年22期)2019-11-29 02:41:40
科学导报·学术(2019年44期)2019-09-10 22:25:45
中学生数理化·中考版(2017年6期)2017-11-09 02:46:51
汽车维修与保养(2015年8期)2015-04-17 03:32:59
现代企业(2015年5期)2015-02-28 18:50:43
