
二自由度机械臂的鲁棒轨迹跟踪控制及仿真
2018-01-05 03:07赵艳花陈文清
洛阳理工学院学报(自然科学版) 2017年3期
张 果,赵艳花,陈文清
(洛阳理工学院 电气工程与自动化学院,河南 洛阳 471023)
二自由度机械臂的鲁棒轨迹跟踪控制及仿真
张 果,赵艳花,陈文清
(洛阳理工学院 电气工程与自动化学院,河南 洛阳 471023)
本文以二自由度机械臂为主要研究对象,对机械臂进行运动学模型分析和动力学模型分析,采用自适应鲁棒PD控制器,给出自适应律设计。最后基于Matlab软件搭建控制系统图,通过调节参数实现对机械臂轨迹的跟踪控制。
二自由度机械臂;轨迹跟踪;D-H参数法;自适应鲁棒控制
机械臂是一个多输入多输出非线性系统,具有强耦合性、时变性,由于存在测量的不精确、外部扰动、未建模动态、负载变化等不确定性,实际上无法建立精确完整的模型,因此实现机械臂的快速精确控制具有很大的难度。
考虑一个N自由度机器人力臂[1],其动态性能可以由以下二阶非线性微分方程描述:

(1)

1 控制器的设计
分别引入变量y和qr,并令:
(2)
(3)
其中常数γ>0,则可推出:

(4)


(5)

(6)
对于式(1)描述的机器人系统来说,当误差扰动信号的上确界已知时,采用以下控制器和自适应律,以确保系统全局渐近稳定。

(7)

(8)

(9)

2 机器人的动态方程
考虑动态方程:

(10)

(11)
则第一个关节动态方程为:




(12)
则第二个关节动态方程为:
(13)




3 仿真结果
被控对象为双力臂机器人,r1=1,r2=0.8,m1=0.5,m2=0.5。误差扰动、位置指令和系统的初始状态分别为:

本文采用S函数进行控制器和被控对象的设计,然后在Simulink窗口内将每个S函数模块搭建成仿真控制主程序图。当Kp1=diag(180,190),Kp2=diag(150,150),Kv1=diag(180,190),Kv2=diag(150,150)时,仿真结果如图1~图3所示。图1和图2显示了机械臂关节1与关节2的位置及速度跟踪情况,图3显示了机器人质量特性的未知定常参数向量p1、p2、p3及其逼近结果。
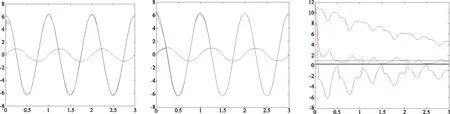
图1 关节1的位置和速度跟踪 图2 关节2的位置和速度跟踪 图3 参数p1、p2、p3及其逼近结果
仿真结果显示自适应鲁棒PD控制对机械臂轨迹跟踪具有很好的控制效果,机械臂的控制力矩越稳定,参数p1、p2、p3越快逼近设定值,轨迹跟踪效果越好。
4 结 语
本文主要研究二自由度机械臂轨迹跟踪控制。机器人是一个多刚体系统,同时也是一个多输入多输出的非线性动力学系统。针对这一问题,本文使用自适应鲁棒PD控制对机械臂进行轨迹跟踪,并且设计了扰动补偿法。针对机器人有界扰动实现了很好的控制,但是针对扰动上界未知的情况仍需进一步的研究。通过对机械臂的轨迹控制,为进一步的控制器设计提供了基础和依据。
[1] 王三秀,俞立,徐建明,等.机械臂自适应鲁棒轨迹跟踪控制[J].控制工程,2015,22(2):16-21.
[2] 王红旗,王庆林.移动机械手运动/力鲁棒自适应轨迹跟踪[J].控制与决策,2010,25(1):105-109.
[3] 胡寿松,周川,胡维礼.基于神经网络的模型跟随鲁棒自适应控制[J].Acta Automatica Sinica,2000,26(5):623-629.
[4] 刘福才,梁利环,高娟娟,等.不同重力环境的空间机械臂自抗扰轨迹跟踪控制[J].控制理论与应用,2014,31(3):352-360.
[5] 孙铭.基于MATLAB和ADAMS的机械臂的轨迹规划与协调控制[D].北京:北京化工大学,2015:8-16.
Robust Trajectory Tracking Control and Simulation of Two DOF Manipulator
ZHANG Guo,ZHAO Yanhua,CHEN Wenqing
(Luoyang Institute of Science and Technology,Luoyang 471023,China)
In this paper,taking two degrees of freedom manipulator as the research object,a specific controller and adaptive law proof design is proposed. The approach is based on the analysis of kinematics and dynamics models and the adaptive robust controller. Finally,the design chart of the control system is build by Matlab and the precision control of the trajectory tracking of the manipulator is realized by adjusting the parameters.
two DOF manipulator;trajectory tracking;D-H parameters method;adaptive robust control
10.3969/i.issn.1674-5403.2017.03.016
TP241.2
A
1674-5403(2017)03-0062-03
2017-01-17
张果(1972-),女,河南南阳人,博士,副教授,主要从事机器人控制、模糊控制等方面的研究.
河南省教育厅重点科研项目(16B423003).
猜你喜欢
数学物理学报(2022年4期)2022-08-22
数学物理学报(2021年4期)2021-08-30
北京航空航天大学学报(2021年7期)2021-08-13
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
北京航空航天大学学报(2019年9期)2019-10-26
数学物理学报(2019年4期)2019-10-10
自动化学报(2019年6期)2019-07-23
现代装饰(2018年5期)2018-05-26
自动化学报(2017年4期)2017-06-15
