光学侦察卫星对地机动目标侦察性能的评估*
2018-01-02 17:26:36郭子淳姜毅李静周帆
现代防御技术 2017年6期
郭子淳,姜毅,李静,周帆
(1.北京理工大学 宇航学院,北京 100081;2.北京电子工程总体研究所,北京 100854)
0 引言
随着卫星侦察技术的发展,卫星分辨率在提高,重访周期在缩短,被侦察地区受到的威胁日益加大。地面静态目标一天内会被卫星重复覆盖多次,发现识别的概率高。机动目标相较静态目标,机动性使其很难被卫星重复覆盖,甚至通过合理规划行动方案,可以完全规避卫星侦察,大大提高了生存能力。
文献[1-2]主要研究光学成像侦察卫星对重点区域等静态目标侦察性能评估的方法,文献[3-7]则提出了许多在复杂场景下、对机动目标侦察性能评估的模型。为了进一步评估光学成像侦察卫星对地面机动目标的侦察性能,继而为规划机动目标的规避侦察行动方案提供依据,本文先利用基于高斯分布的目标转移概率密度函数,计算目标被卫星寻到的概率。在此基础上,具体考虑卫星采集到的目标图像质量和观测者对图像的认知能力,建立了基于改进Johnson判则的光学成像侦察卫星对地面机动目标检测概率模型,计算卫星覆盖下目标被发现、识别和确认的概率。综合搜寻目标概率和检测概率,评价卫星对地面目标的侦察性能。
1 光学成像侦察卫星对地面机动目标检测概率模型
1.1 模型说明
本模型考虑了目标特性、大气因素、卫星遥感器性能、卫星和目标的相对位置、观测者的认知能力对侦察性能的影响;假设图像传输过程无损失,观测者为受过训练的专业人员。
当地面目标静止时,模型利用经典的Johnson判则,计算光学成像侦察卫星对地面目标的检测概率。
当地面目标机动时,则需要先判断其是否被卫星搜寻到,即计算卫星搜寻目标的概率。由于目标机动速度、方向的不确定,本文假设目标位置变化符合高斯分布,提出了一种基于高斯分布的目标转移概率密度函数,用以计算卫星搜寻到目标的概率。随后,再结合Johnson判则,计算卫星对地面机动目标的检测概率。
针对光学成像侦察卫星对地面机动目标侦察的具体情景,本模型将侦察任务分为3个等级:发现、识别和确认(表1)[8],以发现、识别和确认目标的概率来描述侦察性能,适用于单/多光学成像侦察卫星对单/多地面机动目标的侦察。

表1 侦察任务等级Table 1 Reconnaissance mission level
1.2 地面目标静止时卫星检测概率的计算
1.2.1 Johnson判则
美国夜视电子遥感设备局的Johnson将侦察任务分为发现、识别和确认3级,通过大量的试验工作,得到了执行发现、识别和确认任务时计算目标检测概率的经验公式为[8-11]

(1)
式中:N为一维目标最小尺寸上的周数或二维目标特征尺寸上的周数;P(N)为目标周数为N时对应的检测概率;N50为检测概率50%时对应的目标周数,N50由任务的性质来决定。
穿过目标的最小可分辨线条的数目称为目标周数。最小可分辨线条是指从卫星遥感器图像上可以分辨的地面上的最小图案。
Johnson通过试验还确定了当检测概率为50%时,执行不同级别侦察任务(发现、识别和确认)对应的目标周数,即N50的值,如表2所示[8-11]。例如:对于二维目标,如果希望得到的是识别概率,N50应当取3.0;将对应的值带入式(1),即可得到识别目标的概率。
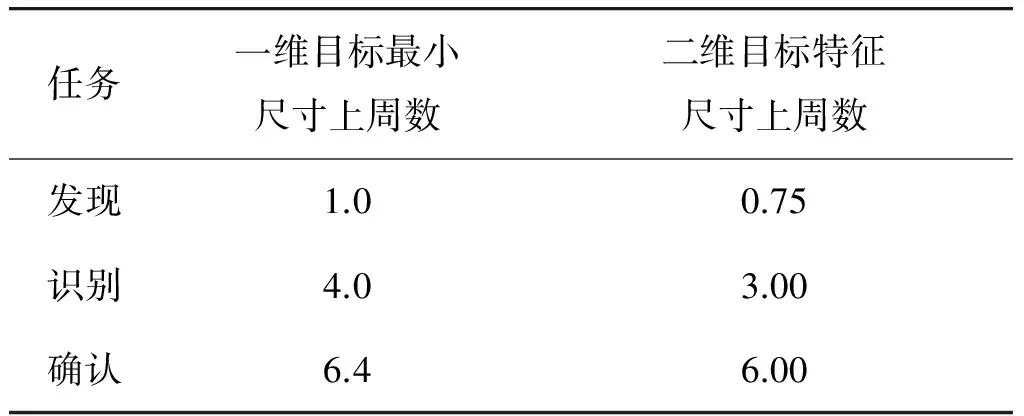
表2 Johnson判据(N50的值) Table 2 Johnson criterion (N50 value)
执行发现、识别、确认任务时目标的检测概率分别称为发现目标概率、识别目标概率、确认目标概率。
1.2.2 目标周数的计算

(2)
式中:N为二维目标特征尺寸上的周数;GSD为地面采样距离;dc为目标的特征尺寸。
特征尺寸为目标宽度和高度乘积的平方根为:

(3)
如果目标的形状不规则,可以把目标作为一个轮廓,将轮廓面积的平方根作为特征尺寸进行描述较为准确。
1.2.3 地面采样距离(GSD)的计算

(4)
式中:p为探测器像元间隔;f为焦距长度;R为卫星和目标斜距;θ为目标相对卫星的仰角。
1.2.4 其他影响因子系数的计算
光学成像侦察卫星成像还受到太阳高度角、云量、大气能见度、目标和背景之间的对比度的影响,因此计算目标静止时的检测概率还需要乘上相应的影响因子系数为

(5)
式中:fC为云量影响因子;fV为大气能见度影响因子;fs为太阳高度角影响因子;fr为目标和背景之间的对比度影响因子[12]。
1.3 地面目标机动时卫星检测概率的计算
Johnson判则假定目标静止,即目标在图像中的位置不变;而在光学成像侦察卫星对地面机动目标侦察的场景中,机动目标的位置时刻改变,这就需要卫星先对目标进行搜寻。因此,计算机动目标检测概率需引入搜寻概率。
1.3.1 机动目标运动概率模型
得到该水域不同时域动态风险评价仿真见图3。倘若对表1中的定性数据(11个时刻下状态的风险因子)进行多次随机量化,同理多次随机仿真,可以得到多次仿真下的风险关联度结果。
卫星访问期间,目标在如图1所示网格区域内运动,假设目标做匀速运动且在x,y方向上保持独立,所受加速度扰动为高斯白噪声[4,13]。tn时刻目标位置为(xn,yn),tn-1时刻目标位置为(xn-1,yn-1)。
ΔTn=tn-tn-1=mnΔt,
(6)
式中:mn为tn和t-1时刻之间时间步长Δt的个数,加速度在每个时间步长Δt内保持不变,即具有相同方差ξ的高斯白噪声序列εn。

图1 机动目标分阶段运动示意图Fig.1 Maneuvering target staged motion diagram
(7)
(8)
当k=mn时,由式(7),(8)得
(9)
由于目标运动方向位置,且受加速度扰动影响,ΔTn时间后,tn时刻的目标(xn,yn),将以tn-1时刻位置(xn-1,yn-1)为圆心,目标估计速度v与ΔTn的乘积为半径形成一个圆,圆上点服从高斯分布,形成目标转移概率密度函数为[13-15]

(10)
高斯分布的参数为
(11)
tn-1时刻目标在网格j中的后验概率为Pj(tn-1),则tn时刻移动到i网格的概率为

(12)
1.3.2 卫星对机动目标的搜寻概率
假设卫星采用网格中目标分布和最大的条带搜索,即过境时,每一时刻卫星都对目标分布概率最大的网格进行搜索,则搜索概率等于目标分布概率的最大值为
).
(13)
1.3.3 卫星对机动目标的检测概率
Johnson判则假定目标静止,而在卫星访问期间,机动目标的位置时刻改变,需要考虑因目标运动而引入的速度、方向随机性对最终检测概率的影响。卫星对机动目标的检测概率PDy由2部分构成:根据基于高斯分布的目标转移概率密度函数计算得到的目标搜寻概率PSe,以及基于经典Johnson判则计算得到的目标静止时检测概率PSt,即机动目标检测概率为
PDy(t)=PStPSe.
(14)
2 模型校验
光学成像侦察卫星对地面目标侦察主要经过卫星覆盖目标、采集目标图像、图像传输及处理、观测者提取图像信息4个环节。为了计算卫星发现、识别、确认机动目标的概率需要先判断目标是否处于卫星的覆盖范围,在此基础上还要具体考虑卫星采集到的目标图像质量和观测者对图像的认知能力,评估从卫星采集到的图像中辨别出目标的可能性。
在评价卫星图像质量和观测者对图像的认知能力的环节中,模型中采用了经验参数,为验证选取参数的有效性,将模型计算结果与公开实验数据进行对比。
美国陆军夜视和电子遥感设备局(NVSED)进行了一项关于坦克确认概率的试验,流程如图2所示。此研究中使用了长宽比例(面积归一化)各不相同的12种坦克,邀请20名观测者。通过调整卫星遥感器的分辨率,得到不同质量的坦克图像。观测者通过观察同种型号坦克、不同质量的图像,对坦克型号进行确认,最终统计每种型号坦克在不同卫星遥感器分辨率,即不同目标周数下的确认概率[8]。
图3中点为某型坦克在不同目标周数下确认概率的试验结果,曲线为本文模型对坦克确认概率的预测。尽管模型在高模糊水平条件下的估计值偏高,在高模糊水平条件下估计值偏低,但数据仍表现出很强的相关性。
综上,模型中选取的经验参数可以有效地预测光学成像侦察卫星发现、识别、确认机动目标的概率。

图2 NVSED坦克确认概率试验的流程Fig.2 Flow of the NVSED experiment for tank identification probability
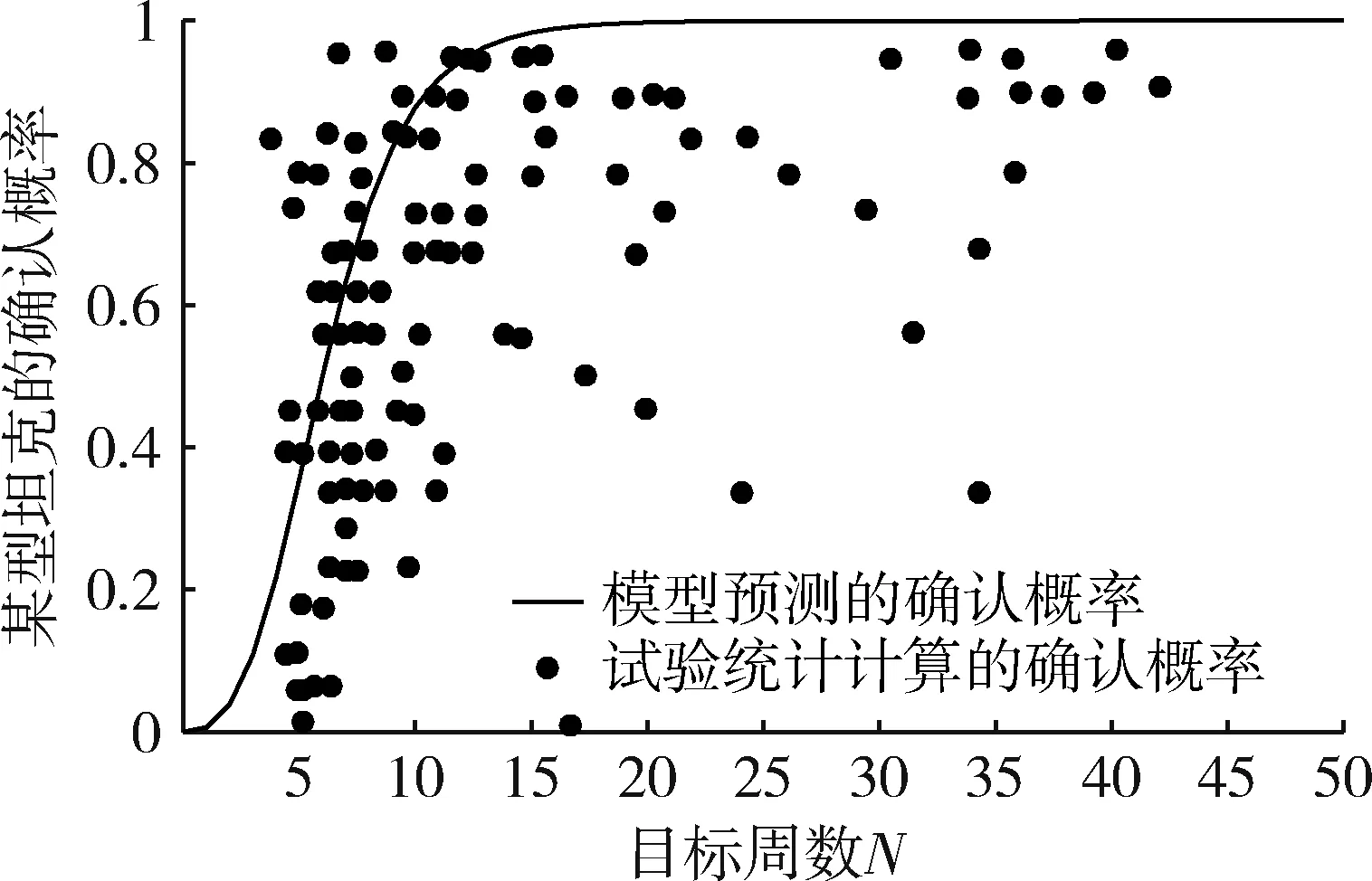
图3 本文模型预测某型坦克的确认概率 与试验结果对比Fig.3 Model prediction of the identification probability of a tank versus the experiment results
3 仿真实例分析
光学成像侦察卫星1~3组成星座,对地面机动目标T进行侦察,分析机动目标T的覆盖情况,采用STK(satellite tool kit,卫星工具包)/Matlab联合仿真,结合地形信息,计算发现、识别和确认机动目标的概率,评估光学成像侦察卫星对地面机动目标的侦察性能。
3.1 系统仿真的参数
仿真时间:24 h(北京时间2016-08-08 T 00:00:00~2016-08-09 T 00:00:00);
卫星参数见表3。

表3 卫星1,2,3的参数Table 3 Satellite 1,2,3 parameters
光学遥感器参数:3个卫星遥感器参数相同,类型均为简单圆锥体,圆锥体半锥角为30°;探测器像元间隔为10 μm;焦距为12 m;
地面机动目标:起点为(91.31°E,33.22°N,0 km),终点为(94.05°E,40.38°N,0 km),北京时间2016-08-08 T 08:00:00出发,以96 km/h的速度匀速沿路径AB行驶;
目标运动高斯白噪声序列方差ξ为0.01,运动区域网格划分数量100,时间步长1 s,每个网格初始分布概率为0.5。
对于光学成像侦察卫星来说,夜间侦察对地面目标不构成的威胁,通过设定目标太阳高度角最小不低于5°,排除夜间覆盖目标的时间。
3.2 仿真结果及分析
根据STK覆盖报告可知,目标一天内被覆盖3次,总持续时间为5.243 min,仿真示意图见图4,覆盖情况见表4。
将目标相对于卫星的仰角和斜距数据从STK中导出,利用基于Matlab的光学成像侦察卫星对地面机动目标检测概率模型,计算发现、识别和确认目标的概率,结果如图5所示。
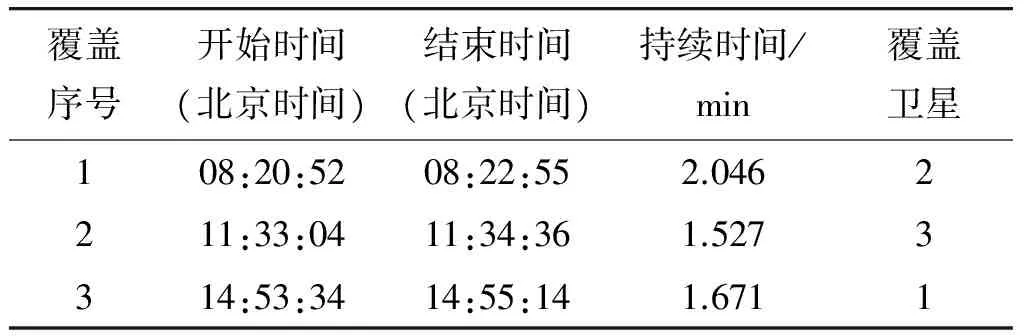
表4 机动目标被覆盖情况Table 4 Maneuvering target coverage
机动目标被覆盖时间段内,随着侦察任务等级的升高,目标检测概率降低,即发现目标概率>识别目标概率>确认目标概率。根据对发现、识别和确认的定义,3次覆盖中发现目标概率几乎为1,说明目标被覆盖一定会以斑点的形式被发现;识别目标概率为70%左右,说明很可能识别出目标类型;确认目标概率低于20%,说明难以确认目标的具体型号。另外,检测概率-时间曲线的趋势是由目标相对卫星的斜距和仰角的变化造成的,如图6所示,斜距小、仰角大,卫星光学遥感器对地面机动目标的分辨能力高,检测概率高。

图4 STK中卫星覆盖目标示意图Fig.4 Satellite coverage target diagram in STK
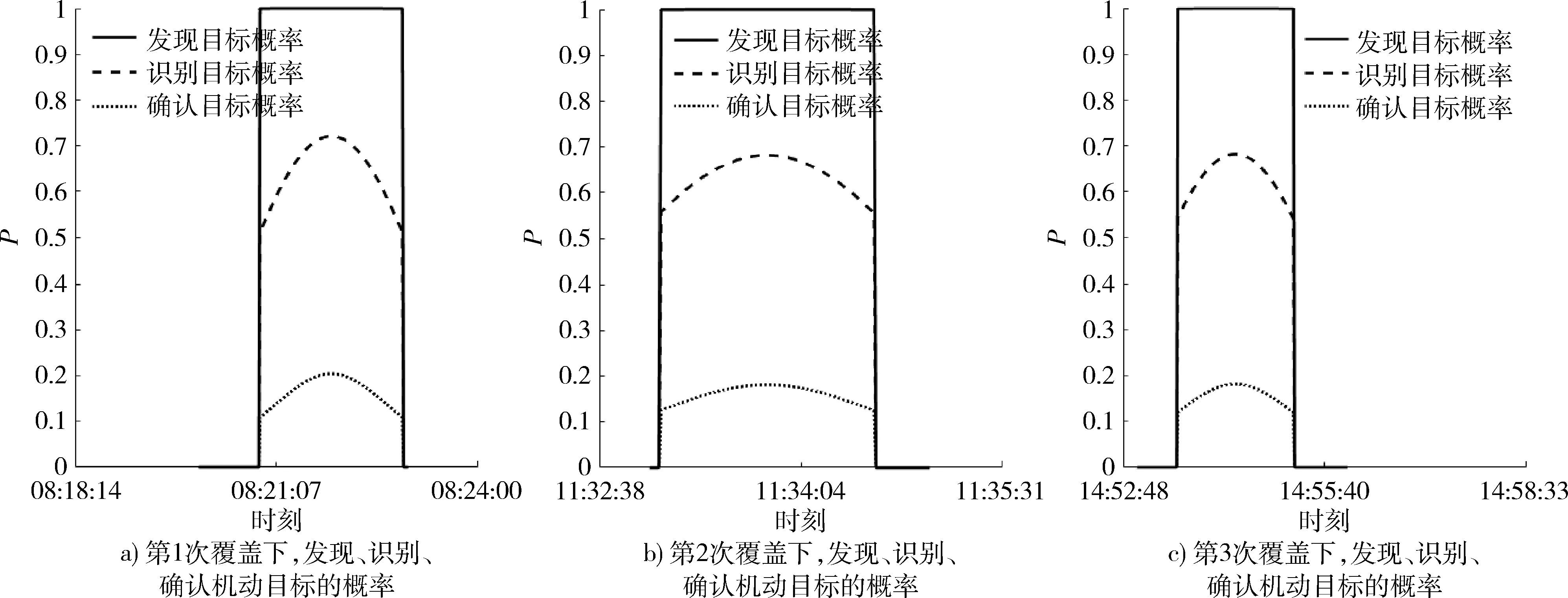
图5 不同覆盖时间下,发现、识别、确认机动目标的概率Fig.5 Detection probability,recognition probability,identification probability for maneuvering target at different coverage time
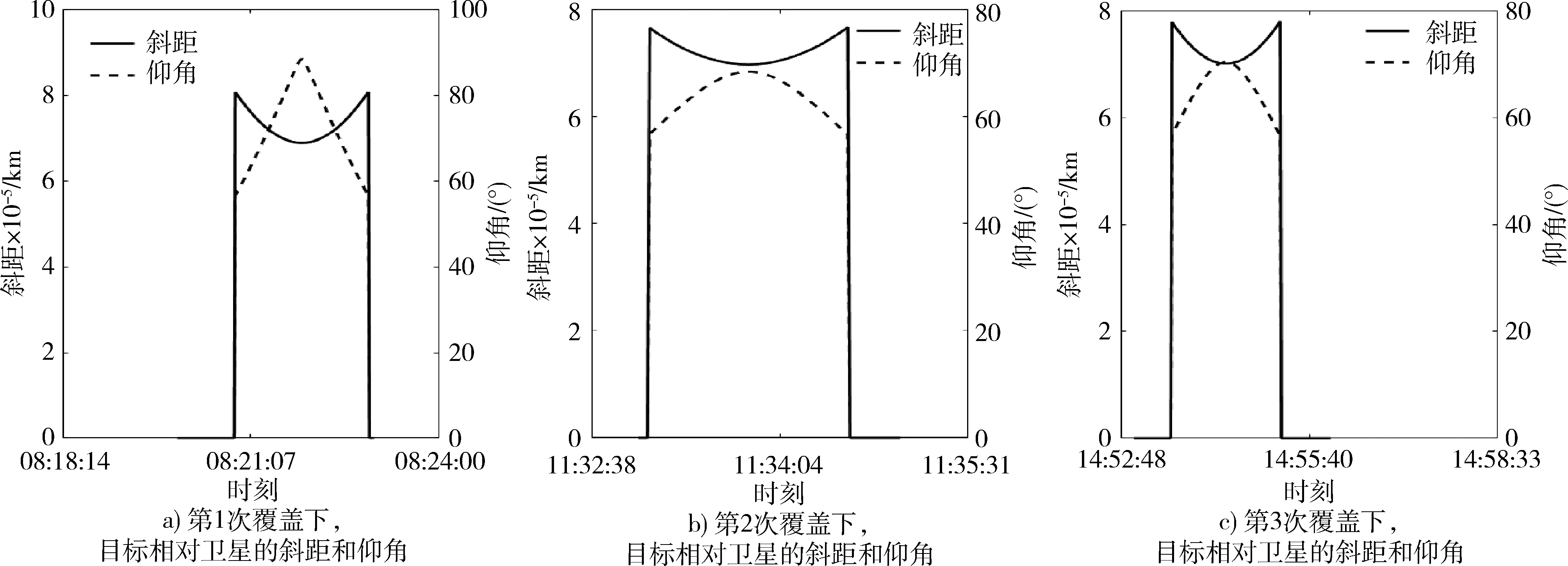
图6 不同覆盖时间下,目标相对卫星的斜距和仰角Fig.6 Range and elevation angle from target to satellite at different coverage time
4 结束语
本文建立了光学成像侦察卫星对地面机动目标检测概率的模型,通过仿真计算发现:目标运动高斯白噪声序列方差、运动区域网格的划分数量、以及每个网格初始分布概率等参数取值的不同,均会影响目标搜寻概率的计算,继而影响目标检测概率。结果表明,模型对光学成像侦察卫星发现、识别、确认机动目标的预测结果与试验结果呈很强的相关性,目标检测概率与目标几何尺寸、卫星探测器像元间隔、卫星和目标之间斜距成正相关,与卫星探测器焦距、目标相对卫星的仰角成负相关。而且,光学成像侦察卫星对地面机动目标的检测概率呈现如下规律:发现目标概率>识别目标概率>确认目标概率。
本文所建模型不仅能够应用于卫星对移动目标侦察性能的评估,同样也适用于其他光学遥感器对移动目标的侦察。
[1] 张翼,梁彦刚,陈磊,等.光学成像侦察卫星威胁评估方法[J].国防科技大学学报,2012,34(5):32-35.
ZHANG Yi,LIANG Yan-gang,CHEN Lei,et al.The Threat Assessment Method of Optics Imaging Reconnaissance Satellite[J].Journal of National University of Defense Technology,2012,34(5):32-35.
[2] 何武灿,廖守亿,苏德伦,等.光学成像侦察卫星威胁特性分析与仿真研究[J].现代防御技术,2015,43(6):21-26.
HE Wu-can,LIAO Shou-yi,SU De-lun,et al.Analysis and Simulation of Threat Characteristics About Optical Imaging Reconnaissance Satellite[J].Modern Defence Technology,2015,43(6):21-26.
[3] MAURER T,WILSON D L,DRIGGERS R G.Search and Detection Modeling of Military Imaging Systems[J].Optical Engineering,2013,52(4):041108-041108.
[4] MEI Guan-lin,RAN Xiao-min,FANG De-liang,et al.Improved Satellite Scheduling Algorithm for Moving Target[C/OL]∥Proceedings of The Fourth International Conference on Information Science and Cloud Computing (ISCC2015).18-19 December 2015,Guangzhou,China.http://pos.sissa.it/cgi-bin/reader/conf.cgi? confid= 264,id.58.2015.
[5] XU Yi-fan.Joint Scheduling for Space-Based Maritime Moving Targets Surveillance[D].Changsha:National University of Defense Technology,2011.
[6] RAN Cheng-xin,WANG Hui-lin,XIONG Gang-yao,et al.Research on Mission-Planning of Ocean Moving Targets Imaging Reconnaissance Based on Improved Genetic Algorithm[J].Journal of Astronautics,2010,31(2):457-465.
[7] CI Yuan-zhuo,BAI Bao-cun,REN Qi-ming,et al.Moving Target Reconnaissance by Multi-Satellite:A Strategy Based on Latent Area[J].Chinese Journal of Sensors & Actuators,2008,21(6):1015-1019.
[8] LEACHTENAUER J C,DRIGGERS R G.Surveillance and Reconnaissance Imaging Systems:Modeling and Performance Prediction[M].Boston,London:Artech House,2001.
[9] VOLLMERHAUSEN R H,JACOBS E,DRIGGERS R G.New Metric for Predicting Target Acquisition Performance[J].Optical Engineering,2004,43(11):2806-2818.
[10] VOLLMERHAUSEN R H,JACOBS E.The Targeting Task Performance (TTP) Metric a New Model for Predicting Target Acquisition Performance[R].Center for Night Vision and Electro-Optics Fort Belvoir VA,2004.
[11] EDWARDS T C,VOLLMERHAUSEN R H,DRIGGERS R G,et al.NVESD Time-Limited Search Model[C]∥AeroSense 2003.International Society for Optics and Photonics,2003:53-59.
[12] 曹裕华,冯书兴,管清波,等.航天器军事应用建模与仿真[M].北京:国防工业出版社;2010.
CAO Yu-hua,FENG Shu-xing,GUAN Qing-bo,et al.Military Spacecraft Application Modeling and Simulation[M].Beijing:National Defense Industry Press,2010.
[13] BERRY P E,PONTECORVO C,FOGG D.Optimal Search,Location and Tracking of Surface Maritime Targets by a Constellation of Surveillance Satellites[R].2003.
[14] XIE Xiao-yang,XU Qi-zhi,HU Lei.Fast Ship Detection from Optical Satellite Images Based on Ship Distribution Probability Analysis[C]∥Earth Observation and Remote Sensing Applications (EORSA),2016 4th International Workshop on.IEEE,2016:97-101.
[15] X.Rong-li,Vesselin P Jilkov.Survey of Maneuvering Target Tracking.Part I.Dynamic Models[J].IEEE Transactions on Aerospace & Electronic Systems,2003,39(4):1333-1364.
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12 00:12:51
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16 05:32:06
装备制造技术(2020年3期)2020-12-25 05:21:52
当代陕西(2019年12期)2019-07-12 09:12:02
地理教育(2019年5期)2019-05-31 05:22:44
汉语世界(The World of Chinese)(2019年1期)2019-03-18 01:50:16
数学学习与研究(2016年21期)2017-05-08 10:25:39
小哥白尼·军事科学画报(2014年8期)2015-04-07 03:54:50
航天返回与遥感(2014年1期)2014-07-31 17:55:36
电脑迷(2014年16期)2014-04-29 03:32:41