
机动目标拦截末制导技术研究*
2018-01-02 17:24董霓徐俊艳
现代防御技术 2017年6期
董霓,徐俊艳
(1.北京电子工程总体研究所,北京 100854;2.航天系统仿真重点实验室,北京 100854)
0 引言
一般地,反弹道导弹的拦截过程作战空域较高,主要在大气层外飞行,空气较为稀薄,很难依靠气动力实现导弹的拦截。作为防御的弹道导弹一般都带有自动寻的导引头等探测装置,以及拦截装置,便于在接近目标时实现直接碰撞来达到拦截敌方导弹的目的。随着防御技术的发展,敌方弹道导弹的攻击能力也逐渐增强,机动目标为了躲避拦截,需要研究具有拦截机动目标能力的导弹制导控制系统,末制导的制导精度将直接的影响到整个拦截过程的成功率。对于目前应用的绝大多数制导律而言,其基本思想都是通过抑制视线转率发散并控制其达到零为主要手段来实现精确制导。因此,视线转率参数信息是制导控制系统中的重要参数。目标的运动主要分为非机动运动和机动运动两种形式,本文针对机动目标进行末制导技术的相关研究。
弹道导弹的拦截在控制系统设计方面有两个主要问题,一是对于目标运动状态的信息估计;二是制导控制方法研究。其中,有效的目标运动状态估计是保证制导精度的前提。在导引头的探测精度很难进一步提高的情况下,通过软件方法提高目标运动状态的估计精度是一个较为有效的手段。本文通过对目标运动状态的估计来达到提高视线转率精度的目的,并针对目标机动采用具有强鲁棒性的滑模变结构制导律来实现有效防御。
1 弹目相对运动方程建立
为了得到带目标机动加速度的视线转率计算表达式,下面在发射惯性系中建立导弹-目标相对运动方程。在视线坐标系中,取相对距离矢量r,对时间求一阶导数有

(1)

再对式(1)求时间的二阶导数有
(2)
式中:下标F代表表达式在发射惯性坐标系下的数学意义;同理有下标4代表表达式在视线坐标系下的数学意义。
经整理,并忽略计算过程中的二阶小量,可得到弹目相对方程为
(3)
式中:at为目标加速度;am为导弹加速度。
式(3)则为带有目标机动加速度的弹目相对运动方程。
2 机动目标拦截末制导信息研究
2.1 视线转率信息提取
相较传统的视线转率提取过程,以往的做法是忽略目标机动加速度,将其含在系统的量测噪声中一并处理。本文针对目标机动,采用Singer模型对其加速度运动信息做了滤波估计,在视线转率提取的过程中,考虑目标机动加速度变化对滤波系统的影响[1-3]。
假定目标加速度a(t)的自相关函数为
(4)
式中:σa为目标加速度方差。
经离散化得到
a(k+1)=e-αTa(k)+w(k+1),
(5)
对式(5)两边同时取期望,进行数学运算,可得
E(a(k+1))=E(e-αTa(k)+w(k+1))=
E(e-αTa(k))+E(w(k+1))=E(e-αTa(k)).
(6)
由于卡尔曼滤波是最小均方意义下的滤波方法,则有


(7)
代入式(7),得到
(8)
对式(8)进行变换有
(9)

运用现代控制理论知识,并选取状态变量为i再将式(9)写成状态方程形式,可得
(10)
式中:Δay=aty-amy;Δaz=atz-amz。
经分析,系统矩阵为线性部分,输入矩阵中rcosx1项呈现为非线性项。由于实际中,x1为一个很小的值,因此非线性项cosx1变化很小,微乎其微,考虑该非线性项和忽略该项仿真结果几乎不受到影响。因此,实际仿真中,认为高低视线角为小量,则本节推导的公式均可以看作线性状态方程处理,简化了实际的滤波计算过程。视线转率滤波系统的量测值为导引头输出的视线角,分别为高低角qε、方位角qβ。式(10)中,Δay,Δaz可以经滤波估计得到的目标机动加速度得出。
2.2 滑模变结构末制导律研究
随着目标运动复杂程度的增加,传统的制导律已经不能满足拦截弹的需求,为了快速响应目标的机动加速度的运动变化情况,考虑到滑模变结构制导律较强的鲁棒性,选取滑模变结构制导律进行制导过程的研究[5]。
考察视线坐标系内的相对运动形式,在末制导过程中,可以将相对运动分解为纵向平面O4x4y4和侧向平面的运动O4x4z4。
(11)
式中:u1=amy(t);u2=aty(t)。

ε(λ)>0,f(0,λ)=0,sf(s,λ)>0,
ifs≠0,
(12)
式中:λ为系统参数。
令系统的自适应滑模趋近律为
k=const>0,ε=const>0.
(13)

已知s=r(t)x2代入自适应动态滑模表达式中,有

(14)
经过数学变化可以得到

(15)
由状态方程有
(16)
通过式(15)和(16)可以得出:
(17)
当小时间间隔δt取得无限小时,可以认为纵向平面内的视线角增量为qε变化很小,且视线角qε本身也为小量。在纵向平面内,容易实现得到的纵向平面自适应滑模变结构的导引律表达式为
(18)
式(18)中引入的符号项函数sgns是非连续函数,在趋近于滑模动态平面时,容易带来高频的抖动现象,并诱发拦截弹弹体产生共振现象,这点对于处于末制导关键阶段的导弹是非常不利的[10-15]。工程应用中,一般选取高增益函数近似代替式(18)中的符号函数项,对抑制抖动有明显的效果。

(19)

3 机动目标拦截末制导仿真结果
3.1 仿真条件
仿真过程初始参数如下述:
导弹运动初始条件:在惯性坐标系下,导弹初始位置为x0=60 km,y0=20 km,z0=-6 km,初始速度vx0=3 km/s,vy0=100 m/s,vz0=-200 m/s。
目标运动初始条件:在惯性坐标系下,目标初始位置为xt0=67 km,yt0=30 km,zt0=10 km,初始速度vtx0=-400 m/s,vty0=1 km/s,vtz0=2 km/s。
3.2 仿真结果
本节中给出的仿真结果如图1~6所示,是在导弹和目标相对距离为25 km时,目标开始做正弦机动。此时,量测系统装置测量到目标位置的变化,制导系统通过目标机动加速度估计环节预估出目标当前的机动加速度,目标机动加速度信息的变化反馈到视线转率信息中,制导律以抑制视线转率发散并控制其达到零为目的,实现对机动目标的有效制导。

图1 拦截过程相对运动关系Fig.1 Relative movement trajectory
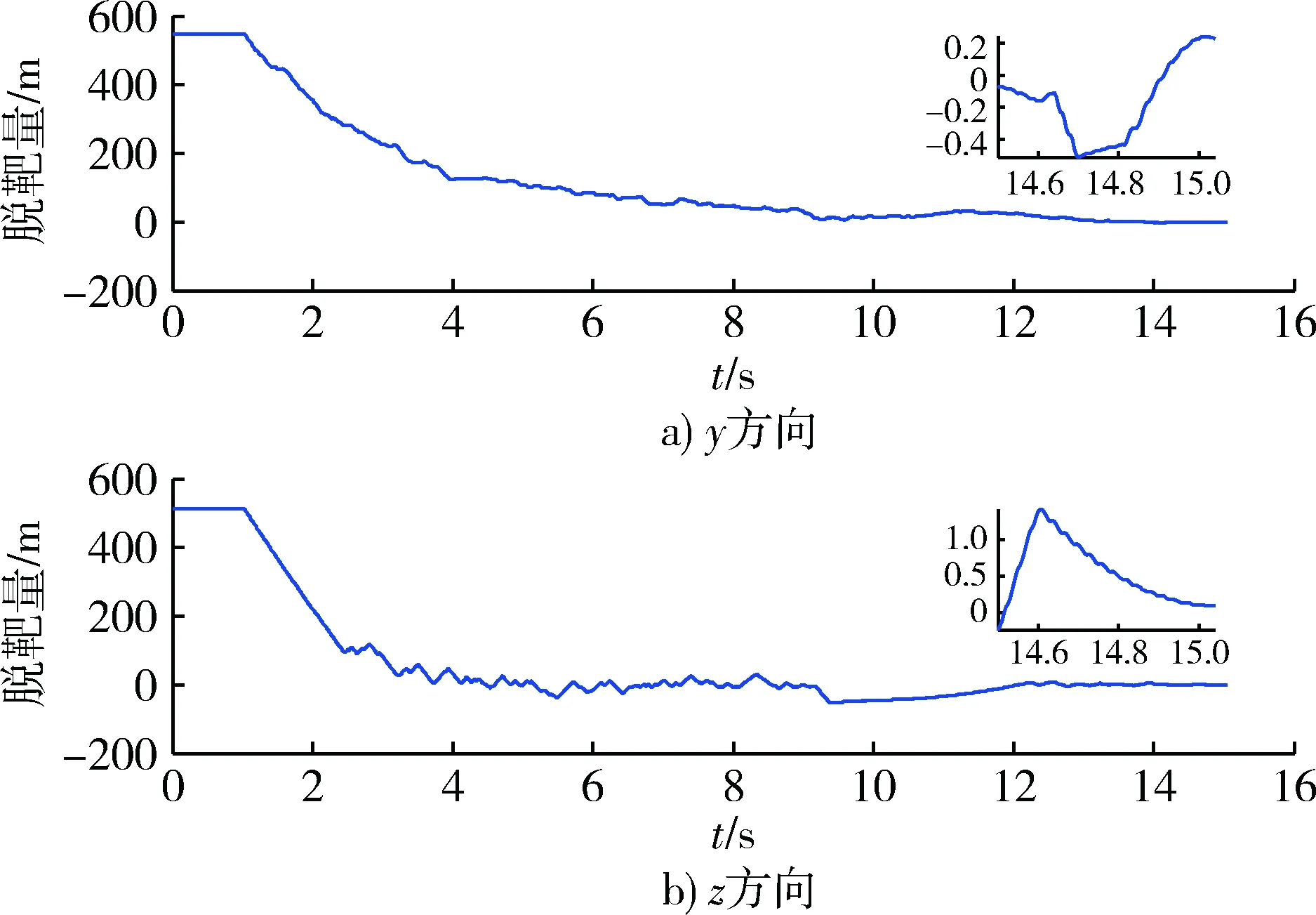
图2 拦截过程脱靶量变化曲线Fig.2 Miss distance curve of intercepting process
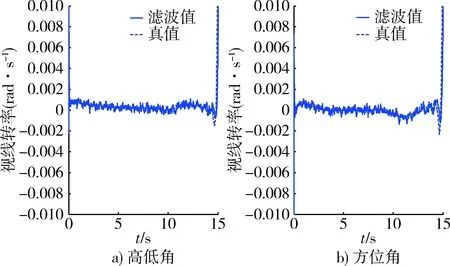
图3 视线角速率滤波曲线Fig.3 Curve of line of sight rate
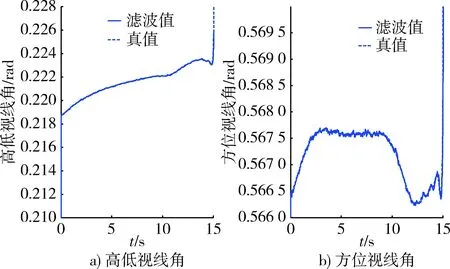
图4 视线角滤波曲线Fig.4 Curve of line of sight
当目标在两者相对距离为20 km时做幅值(过载)为2的机动运动时,若采用传统的比例导引,即使有目标加速度的估计环节也很难命中目标。图7所示,若采用传统的比例导引应对机动目标,会造成较大的脱靶量。因此,对于机动目标,基于估计目标机动加速度的方法采用滑模变结构制导律,可以有效实现对机动目标的拦截。

图5 相对距离和相对速度曲线Fig 5 Curve of relative distance and relative velocity

图6 目标机动加速度估计曲线Fig.6 Curve of estimated target maneuvering acceleration

图7 拦截过程脱靶量变化曲线Fig.7 Miss distance curve of intercepting process with non maneuvering target via PNG
4 结束语
本文研究了机动目标的视线转率算法,将目标机动加速度的估计值带入导弹-目标相对运动方程中,可以得到含有目标机动的视线转率方程。经过仿真分析可以发现,含有目标机动加速度的视线转率信息精度高于不含机动信息的视线转率,并且随着目标机动强度的增大,估计目标机动加速度的必要性增加。针对机动目标,以往的传统制导律不再适用,在获得含有机动信息的视线转率后,考虑具有强鲁棒性的滑模变结构制导律,并将目标的机动加速度信息作为制导律的输入参数。经过仿真分析,证明了估计机动加速度的必要性,并且滑模变结构制导律对目标机动具有较强的适用性,控制效果较好。
[1] SINGER R A.Estimating Optimal Tracking Filter Performance for Manned Maneuvering Targets[J].IEEE Trans.on Aerospace and Electrical System,1970,6(7):473-483.
[2] 王军政,沈伟,赵江波.机动目标跟踪中机动频率的自适应调整[J].北京理工大学学报,2007,27(1):38-41.
WANG Jun-zheng,SHEN Wei,ZHAO Jiang-bo.Adaptive Adjustment of Maneuvering Frequency in Target Tracking[J].Journal of Beijing Institute of Technology,2007,27(1):38-41.
[3] 刘昌云,刘进忙,陈长兴,等.机动目标跟踪的机动频率自适应算法[J].控制理论与应用,2004,21(6):961-965.
LIU Chang-yun,LIU Jin-mang,CHEN Chang-xing,et al.Maneuvering Frequency Adaptive Algorithm of Tracking a Maneuvering Object[J].Control Theory & Applications,2004,21(6):961-965.
[4] MEHROTRA K,MAHAPATRA P R.A Jerk Model for Tracking Highly Maneuvering Targets[J].IEEE Transaction on Aerospace and Electronic Systems,1997,33(4):1094-1105.
[5] 周荻.寻的导弹新型导引规律[M],北京:国防工业出版社,2002.
ZHOU Di.New Guidance Law for Homing Missile[M].Beijing:National Defense Industry Press,2002.
[6] 何友,修建娟,张晶炜,等.雷达数据处理及应用[M].北京:电子工业出版社,2009.
HE You,XIU Jian-juan,ZHANG Jing-wei,et al.Radar Data Processing with Applications[M].Beijing:Publishing House of Electronics Industry,2009.
[7] LAWRENCE R V.Precision Guidance Against Maneuvering Targets[C]∥Proceedings of the American Control Conference (Seattle WA,USA) USA:American Automatic Control Council,1995:4127-4130.
[8] ZARCHAN P.Tactical and Strategic Missile Guidance[M].3rd ed.Washington DC,USA:American Institute of Aeronautics and Astronautics,1997.
[9] RICKERG G,WILLIAMS J R.Adaptive Tracking Filter for Maneuvering Targets[J].IEEE Transaction on Aerospace and Electronic System,1978,AES-14:185-193.
[10] BEZICK S,Han Rusnak,Steven Gray W.Guidance of a Homing Missile via Nonlinear Geometric Control Methods[J].Journal of Guidance,Control and Dynamics,1995,18(3):441-448.
[11] BABUK R,SARMA I G,SWAMY K N.Switched Bias Proportiona Navigation for Homing Guidance Against Highly Maneuvering Target[J].Journal of Guidance, Control,and Dynamics,1994,17(5):1357-1363.
[12] ZHOU Di,MU Chun-di,XU Wen-li.Adaptive Sliding-mode Guidance of a Homing Missile[J].Journal of Guidance, Control, and Dynamics,1999,22(4):589-594.
[13] LI R X,JILKOV V P.A Survey of Maneuvering Target Tracking:Dynamic Models[C]∥Proceedings of SPIE,2000,4048:212-236.
[14] JULIER S J,UHLMANN J K,DURRANT-Whyte H F.A New Method for the Nonlinear Transformation of Means and Covariances in Filters and Estimators[J].IEEE Trans.on Automatic Control,2000,45(3):477-482.
[15] WAN E A,MERWE R V.The Unscented Kalman Filter for Nonlinear Estimation[C]∥IEEE Symposium 2000(AS-SPCC),Lake Louise,Alberta,Canada,Oct.2000:153-158.
猜你喜欢
大电机技术(2022年2期)2022-06-05
特区文学·诗(2021年6期)2021-12-22
青年文学家(2020年22期)2020-08-31
北京航空航天大学学报(2017年4期)2017-11-23
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
北京航空航天大学学报(2016年4期)2016-02-27
当代贵州(2015年19期)2015-06-13
