
基于线结构光扫描的机器人GMAW自适应规划方法
2017-12-29 05:46陈华斌
电焊机 2017年11期
孔 萌 ,张 杰 ,顾 帆 ,陈华斌
(1.上海发那科机器人有限公司,上海201206;2.上海交通大学材料科学与工程学院,上海200240)
基于线结构光扫描的机器人GMAW自适应规划方法
孔 萌 1,张 杰 1,顾 帆 2,陈华斌 2
(1.上海发那科机器人有限公司,上海201206;2.上海交通大学材料科学与工程学院,上海200240)
针对弧焊机器人在中厚板焊接中的应用,研制了一套激光视觉传感器,基于FANUC机器人TCP/IP协议,开发了传感器与机器人控制器之间的通讯平台。以厚20mm的Q345单V型坡口机器人GMAW为例,结合机器人手眼标定、线结构光平面参数标定结果,实现变间隙焊道参数自适应规划及多层多道自动编排,结果满足机器人中厚板自适应焊接要求。
线结构光;弧焊机器人;自适应规划
0 前言
随着我国《中国制造2025》的战略实施,焊接制造领域正经历“两化”融合的推动,朝着数字化、信息化、网络化和智能化转型升级,使焊接制造过程中的信息需求量显著增加[1]。传统“示教-再现”型机器人无法感知外界环境,对作业环境变化做出实时调整,通常通过调整夹持工具、安装精度来减少焊缝相对预设位置的轨迹偏差,但无法从本质上解决问题。
近几年,随着计算机视觉、模式识别、图像处理等技术的发展,机器人焊接智能化应用研究得到逐步推广并大规模应用,而激光结构光传感器具有结构简单、体积小等特点,广泛应用于机器人焊接的焊缝跟踪、轨迹规划等领域,如Servo-Robot、Meta等商业传感器。尽管激光视觉传感器的开发应用日渐成熟,但在处理中厚板焊接问题时仍然存在很多不足,如中厚板坡口复杂曲线变化、焊枪姿态、前进角及坡口装配间隙的不均匀性,给中厚板焊缝跟踪、焊接参数(速度、摆幅等)和焊道自适应编排等带来了诸多难题[2-4]。
本研究基于FANUC弧焊机器人系统平台,以中厚板变间隙单V型坡口机器人GMAW为例,研制了一套激光视觉传感器,基于TCP/IP协议和Socket的客户端(机器人控制器)-服务器(激光传感器)的模式进行数据应答,根据视觉传感器反馈到机器人控制器的坡口特征信息,进行焊接参数(如焊接速度)和摆幅的自适应调节,实现中厚板机器人GMAW自适应焊接。
1 激光焊缝跟踪及试验系统
搭建的弧焊机器人平台如图1所示,主要包括FANUC M-20iA本体、机器人控制器R-30iB、焊接电源 Power Wave i400/R350、Lincoln Auto Drive 4R90送丝机构及焊枪等。传感系统包括激光视觉传感器和主控计算机。

图1 FANUC弧焊机器人系统平台
视觉传感系统主要由激光器、夹持机构、减光/滤光系统及CCD相机等组成。采用MER-200-20GM型CCD视觉传感器,有效像素200万,CCD靶面尺寸29 mm×29 mm,通过GigE数据接口传输图像数据,并集成I/O接口,提供线缆紧锁装置,能在各种恶劣环境下稳定工作。半导体激光器中心波长为650 nm,工作寿命可达12 000 h以上。光斑形状为一字条纹,且激光条纹亮度高、条纹细,投射在工件表面可直观反映坡口特征。由于焊接过程中强烈电弧光及飞溅等干扰激光条纹质量,导致无法有效地精确识别焊接前端熔池的激光条纹,为此设计了一套减光/滤光系统,利用激光的相干性和单色性对电弧弧光有选择地进行滤波处理。
系统软件平台是基于Visual C++2015环境下开发和运行,软件界面由4个功能区组成,左侧功能区是焊接过程监控和图像提取界面,右侧功能区是相机控制、视觉标定和通讯模块。可实时呈现激光条纹移动的动态位置,如焊缝偏差值ΔY、ΔZ,间隙,错边,坡口面积,坡口深度等信息。通讯模块可设置对应的端口号和IP地址,下方显示框可显示参与通讯设备之间的具体信息,如图2所示。

图2 焊缝激光跟踪软件界面
2 机器人GMAW变间隙自适应规划
为了实现机器人的焊缝识别,需要识别出焊缝坡口特征点。视觉系统标定的目的是寻找图像坐标与机器人世界坐标系的转化关系,主要涉及摄像机参数标定、结构光参数标定以及手眼标定。
文献[5]介绍了相机内外参数标定的详细过程,内外参数标定结果如表1所示。
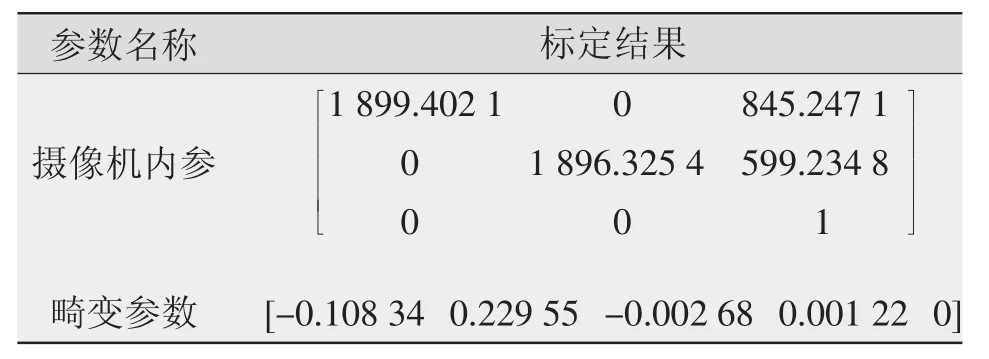
表1 相机参数标定结果
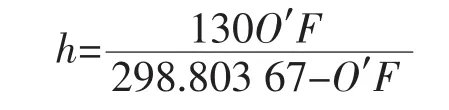
为了确定相机与图像平面之间的空间相对位置,需要对视觉传感器线结构光平面进行标定,考虑到传感器、CCD镜头相对封装固定,相对位置不发生变化。采用三角投影法推导高度相对位置关系,如图3所示。
得出高度方向的解析表达式
采用十点法,机器人内部控制器根据视觉传感器采集的信息自动进行手眼标定。

图3 激光传感器的投影关系
对待焊的单V型坡口试板,激光条纹打到工件表面可以提取到 6 个参数:ΔX、ΔY、ΔZ、GAP、Mismatch和Area。而本研究主要研究平板对接,不考虑焊接错边,只需考虑 3个参数:ΔY、ΔZ、GAP,并实时发送至机器人控制器,数据发送间隔为50 ms,通过机器人内部控制器转换实际焊接参数(焊接速度和摆幅)进行施焊,如图4所示。
然而,在焊接过程中由于飞溅、电弧光以及激光条纹本身亮度等因素的影响,造成图像不清晰,激光条纹难以辨认,如图5所示。对指定区域进行划定ROI(Region of Interest,ROI)处理:中值滤波、激光条纹形态学处理(膨胀、腐蚀)、OSTU阈值分割及二值化处理等,图像处理过程见文献[5]。
自适应摆动焊接主要针对焊缝坡口宽度或间隙渐变情况,通过激光视觉传感获取坡口特征参数反馈至机器人控制器,自适应调节焊枪摆动幅度和焊接速度。控制基本策略为:当激光器扫描到间隙较小时,机器人焊接速度较快,摆动幅度较小,保证焊接时单位时间内焊丝填充量较小,焊缝成形较窄。当激光器扫描到间隙较大时,机器人焊接速度较慢,摆幅较大,保证焊接时单位时间内焊丝填充量较大,焊缝成形较宽。

图4 变间隙V型坡口激光条纹采集

图5 激光条纹图像处理
对接V型坡口的截面如图6所示。根据单位时间内熔化的焊丝体积和填充金属的长度,可以建立填充焊缝的关系式。

图6 坡口形貌示意
针对变间隙自适应焊接,需要根据焊缝坡口截面积的变化来调整焊接速度,解析公式为

式中 η为填充效率;h为规划填充高度;l为坡口间隙;D为焊丝直径;Wf为送丝速度;其余参数如图6所示。变间隙对接V型坡口机器人GMAW的另一个重要参数摆幅,其中Δ为坡口间隙值,δ为经验修整值。基于间隙渐变情况,机器人GMAW自适应焊接效果如图7所示,焊缝成形良好。

图7 变间隙机器人GMAW自适应焊接焊缝
3 结论
提出了一种用于坡口间隙变化的自适应规划方法和工艺流程,该方法可以自适应焊缝间隙的变化,实现连续稳定的焊接,多层多道焊每层层高及焊缝成形良好,满足弧焊机器人中厚板自适应焊接的需求。
[1]陈华斌,孔萌,吕娜,等.视觉传感技术在机器人智能化焊接中的研究现状[J].电焊机,2017,47(3):1-16.
[2]袁海龙,刘建春,易际明,等.中厚板复杂焊缝机器人自动跟踪系统[J].电焊机,2015,45(7):35-39.
[3]张洵.基于激光视觉传感的机器人焊接系统及多层多道规划研究[D].上海:上海交通大学,2015.
[4]张华军,张广军,蔡春波,等.机器人多层多道焊缝激光视觉焊道的识别[J].焊接学报,2009(4):105-108+118.
[5]顾帆.基于激光传感的机器人MAG焊变间隙自适应规划方法[D].上海:上海交通大学,2017.
Robotic GMAW adaptive welding based on linear structured light scanning method
KONG Meng1,ZHANG Jie1,GU Fan2,CHEN Huabin2
(1.Shanghai Fanuc Robotics Co.,Ltd.,Shanghai 201206,China;2.School of Materials Science and Engineering,Shanghai Jiaotong University,Shanghai 200240,China)
A laser vision sensor has been developed for the thick plate arc-welding robot.In this paper,a communication platform between vision sensor and robot controller is exploited based on TCP/IP of FANUC.With 20 mm thick Q345 single V groove GMAW robot as an example,combining with the eye-in-hand and linear structured light equation,it can realize the welding parameters and path adaptive planning under the gradient gap.The result of planning demonstrates the method can meet the requirements of robotic welding for thick plate.
linear structured light;arc welding robot;adaptive planning
TG409
A
1001-2303(2017)11-0041-04
10.7512/j.issn.1001-2303.2017.11.08
本文参考文献引用格式:孔萌,张杰,顾帆,等.基于线结构光扫描的机器人GMAW自适应规划方法[J].电焊机,2017,47(11):41-44.
2017-07-24
孔 萌(1979—),男,博士,主要从事焊接智能化及机器人系统工程的研究。E-mail:kongmeng@shanghaifanuc.com.cn。
猜你喜欢
中国金属通报(2022年1期)2022-06-02
中国新技术新产品(2020年6期)2020-06-19
汽车维修与保养(2020年11期)2020-06-09
小福尔摩斯(2019年2期)2019-09-10
小学生必读(低年级版)(2019年9期)2019-04-13
小学生必读(低年级版)(2019年10期)2019-04-13
中国惯性技术学报(2017年1期)2017-06-09
应用科技(2015年5期)2015-12-09
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
娃娃画报(2014年9期)2014-10-15
