
嫁接用大粒种子定向播种机构的设计研究
2017-12-16 02:48孔艳山张铁中张立博张文波
农机化研究 2017年4期
孔艳山,张铁中,褚 佳,张立博,张文波,刘 展
(中国农业大学 工学院,北京 100083)
嫁接用大粒种子定向播种机构的设计研究
孔艳山,张铁中,褚 佳,张立博,张文波,刘 展
(中国农业大学 工学院,北京 100083)
设施园艺中嫁接机进行嫁接时对苗木的要求较高,需要人工调整苗木子叶方向,导致嫁接效率低下、劳动生产成本较高。为此,设计了一种可以定向种子长轴方向使长出子叶排列方向一致的定向播种机构,并对振动种盘机构、取送种机构、种子定向机构及整体框架进行了设计,使用欧姆龙的CPM1A型PLC控制机构的运动。试验结果表明:其工作性能优良,可以大幅度提高播种效率。
振动种盘;定向播种;仿形刮板;PLC控制
0 引言
改革开放以来, 随着农业产业结构的不断调整,我国设施园艺发展迅猛,呈现出生产面积快速增加、作物种类逐步增多、设施类型日趋多样及管理水平逐渐提高的好势头[1];但设施园艺生产存在连作障碍问题,即连续种植容易造成土壤中病虫基数积累,形成土壤传播病害,最终导致蔬菜生产质量的下降。采用蔬菜嫁接育苗技术可以有效地防治土壤传播的病害,且嫁接后的秧苗抗逆性和产量都得到很大提高,对蔬菜品质基本没有不良影响。因此,蔬菜嫁接技术已成为一项无公害、增产、节能的创收技术,得到广泛推广,特别是对耕地面积小难以实现轮作的地区和设施栽培地更为适合[2]。传统手工嫁接劳动生产率低、劳动强度大、劳动成本高且嫁接成活率低,已经不能适应设施园艺技术的快速发展,嫁接机应运而生[3-6]。在嫁接机嫁接过程中,需要用嫁接机砧木切削机构和穗木切削结构分别切去砧木苗的一片子叶和穗木苗的一段茎秆。为了准确切除砧木苗的子叶,要保证将砧木子叶展开的方向朝向嫁接机切刀刀口,因此现有嫁接机在作业中一般是由人工供苗,使砧木子叶方向达到上述要求。瓜科全自动嫁接机器人无需人工供苗,提高了嫁接劳动生产率,降低了劳动强度。与需人工送苗的半自动嫁接机相比,虽有很大的技术进步,但它对砧木子叶张开方向的一致性具有较高的要求,即需要砧木子叶的展开方向基本一致;而影响砧木子叶生长方向的关键因素,就是播种时的南瓜籽(包括云南黑籽南瓜、白籽南瓜)等大粒种子在穴盘播种时的籽粒方向。
为此,设计了一种嫁接用种子定向播种机构,主要用于调整播种时种子长轴的排列方向,以达到长出的幼苗叶片方向一致的目的。
1 整体结构
嫁接用种子定向播种机构主要由振动种盘、取送种及种子定向等机构组成。振动种盘机构采用直线振动器,振动频率可以通过速度控制器调节,其他运动采用气缸驱动,控制系统采用欧姆龙公司的CPM1A微型PLC。工作时,其能一次性完成供种、送种、播种及种盘传动等过程。播种机构采用单套振动种盘搭配两套种子定向机构,播种效率是单套种盘配单套定向机构的两倍,从而降低了能源消耗,大幅度提高了播种效率。其整体结构如图1所示。
2 关键部件的设计
2.1 振动种盘机构的设计
振动种盘的主要功能是供种并通过振动方式补充种子被吸附后所产生的空缺。种子采用真空吸盘吸附方式,种盘机构上的种子被吸附后会产生一定的空缺,采用轻微振动种盘的方式可以有效解决吸附后种子空缺问题。为了使吸盘吸附种子方便,达到更加均匀稳定的供种效果,设计了V型种盘,如图2所示。V型种盘的种堆呈上宽下窄形状,加大了种堆上部的宽度,使种堆紧凑地排列成一列,采用可以通过速度控制器调节振动频率的直线振动器,可以随时调节振动频率。
为了使种堆表面较为平整且种子都聚集在V型种盘的底部,有利于吸盘对种子的吸附,本设计采用折弯角α=140°。

1.穴盘 2.取送种机构 3.V型振动种盘 4.机架 5.仿形刮板 6.垫板

图2 V型板
2.2 种子定向机构的设计
大粒南瓜种子大至呈椭圆状,尖端部分为种子发芽时的破壳出口,如图3所示。为保证后期嫁接作业的全自动化,要求嫁接用苗的子叶展开方向一致。通过种子育苗试验可知:只要保证种子的长轴方向在穴盘中基本一致,无论芽口朝左还是朝右,都能较好地实现幼苗子叶展开方向的一致性,如图4所示。
外形轮廓贴合原理:南瓜等种子外形为椭圆形,与种子长轴垂直的弧面较尖锐,且距离种子重心较远,该尖锐弧面与其他面在运动过程中处于不稳定状态。因此,利用种子与长轴和短轴垂直的两侧的不同弧度和重心趋稳特点,就可以使其长轴保持在一定的方向上。本研究设计了一圆孔,将种子放置于该圆孔内,驱动圆孔进行几次来回往复运动之后,种子的短轴弧边就会与圆孔的弧边贴合,从而使所有种子的长轴都处于同一方向,如图5所示。

图3 大粒南瓜种子
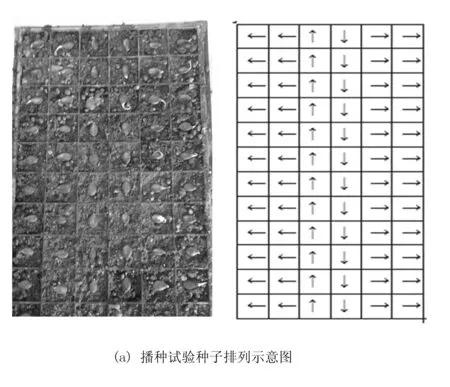
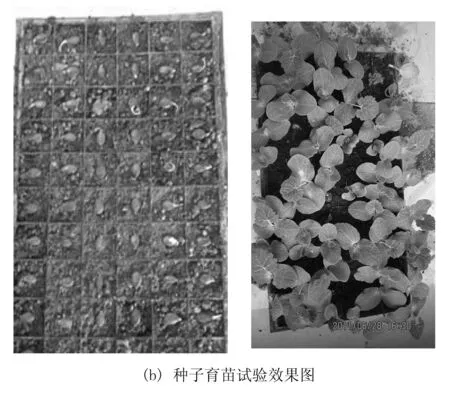
图4 育子育苗试验图

图5 种子定向效果图
该种子定向的方法能够简便地将种子的长轴方向处理为同一方向,保证了种子出芽后其子叶展开方向的一致性。 若将定向板制成适合整盘穴盘的规格,按此方法可同时对整盘待播种子进行定向排列,达到高效率的整盘播种流程。
设计的种子定向机构由仿形刮板、垫板和驱动气缸组成。在刮板和垫板的相对运动中,刮板采用仿形结构可以从各个方向对种子进行约束,有效提高定向效率。垫板用来支撑仿形刮板和气缸等零件的质量,需要垫板具有较大的强度和硬度,不能在工作过程中产生变形和运动。另外,种子掉落过程中下落的距离不能太大,否则容易在下落的时候发生方向的改变从而导致长轴方向不同,因此垫板的厚度要尽可能地小。综合考虑,垫板的材料选用不锈钢板较为合适,能满足上述所需的要求。气缸行程分别设计为a和A,且a小于A,并将a行程气缸固定在A行程气缸推杆上,工作过程如图6所示。其中,a行程气缸伸出并收回,将种子在刮板上的位置和方向调整好;然后A行程气缸伸出,刮板孔的行程超过垫板的长度,种子从刮板孔落入穴盘,A行程气缸收回,一个行程结束。

图6 A行程气缸工作过程
将种子的外形近似看作两条对称的曲线围成的密闭图形,随机取100粒种子,测量组成每粒种子的曲线的曲率半径(mm),结果如表1所示。
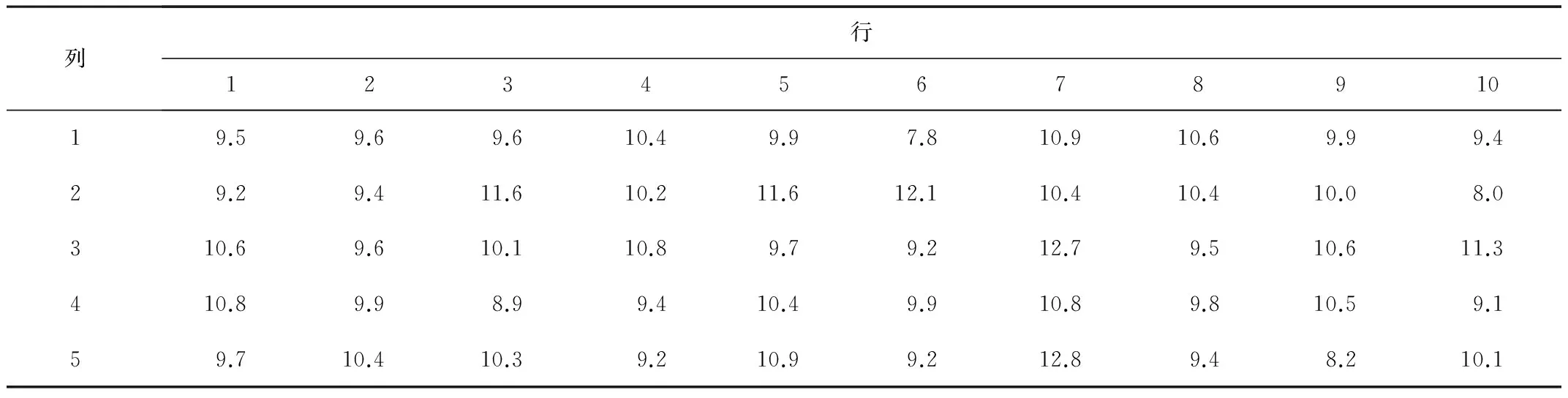
表1 种子的曲率半径 mm

续表1
2.3 取送种机构的设计
气吸式播种具有易于实现单粒定株距、精确播种、苗齐、节省种子及作业速度高等优点,在农作物精量播种中应用广泛。取种机构主要由真空泵、外部先导式电磁阀及真空吸盘等构成。真空泵通过气路向真空吸盘提供负压,形成吸盘与种子表面的气流压力差产生吸力[7-10]。
本机构选用德国SCHMALZ圆形波纹吸盘2.5折通用型,能适合不同形状和尺寸的种子,接触种子时有良好的缓冲性能,对曲面的种子表面形状有较好的适用性。在对吸盘固定时,采用将法兰盘下部改为圆柱形状的方案,可以有效地防止吸盘连接头在轴向方向运动,并确保吸盘连接头与安装板在水平面上相对固定。
种子通过取送种机构从振动种盘吸住取出,再由取送种机构送到种子定向机构,需要控制取送种机构的竖直和水平运动。由于气缸运动具有快速准确、易于控制的特点,因此本研究的取送种机构均采用气缸作为执行元件。在竖直运动过程中,要注意避免的是取送种机构与振动种盘及取送种机构与定向机构的碰撞,还要保证下落种子的位置和刮板孔的高度差不能太大,否则会导致种子长轴方向的改变。在竖直运动中,选用CHELIC公司的70mm行程的双轴气缸。在水平方向上,选用CHELIC公司的350mm行程气缸来驱动,这是一种行程较大的单轴气缸,无法承受竖直方向的力。于是,采用滑块导轨,种子吸附机构和滑块相固定,滑块与水平驱动气缸相连接,导轨固定在机架上,从而使气缸通过驱动滑块来驱动种子吸附机构运动,参见图1。
3 控制流程
可编程控制器是近年来迅速发展并得到广泛应用的新一代工业自动化控制装置。根据供种、取种、送种、定向等工作过程,以一定的逻辑、时序关系进行控制系统的软件编程,整个工作过程不断循环,PLC也在循环过程中进行周期性扫描。为提高机器播种效率,本设计中采用一套种盘搭配两套定向机构,对两列穴盘进行播种,从而形成了一套在振动盘吸种、另一套在穴盘中播种连续交叉的工作状态。开始工作后,左右两边吸盘同时进行取种和送种。整体控制流程图如图7所示。
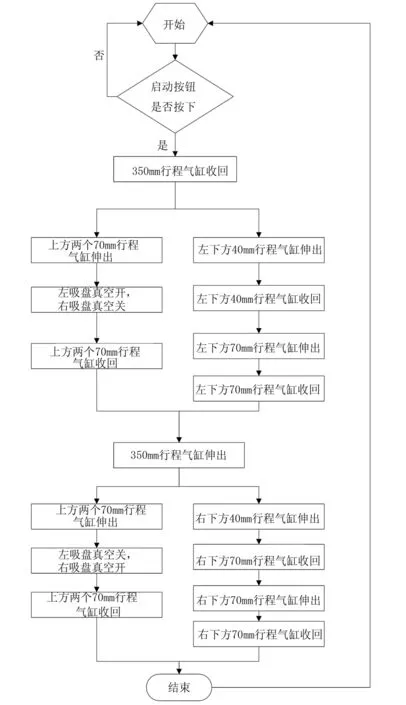
图7 整体控制流程图
4 实验结果分析
经过上述对整体机构的描述,现对整机性能做初步的实验,以考察本机构的性能。
4.1 种子定向机构定向效果
首先对种子定向机构的定向效果进行实验。实验时首先执行定向机构进行种子定向,对定向后种子的长轴方向进行角度测量,以考察定向效果。为便于测量,采用机器视觉与图像处理的方法对定向后的种子测量其长轴方向的角度,如图8所示。

图8 种子定向检测图像处理方法
通过机器视觉直接采集一排种子的俯视图像,经过图像处理后可直接测出其长轴的偏转角度。由图8可以看出:所检测的偏转角度基本接近180°。记录结果时,取其与180°的绝对值。
采用以上所述方法,进行种子定向效果实验,分为3组进行,每组测试20粒种子的定向效果,结果如表2所示。

表2 种子定向试验效果
从实验结果可以看出:机构对种子的定向平均偏差为15°。根据嫁接实验,砧木子叶偏转在30°以内,可以满足嫁接要求。
4.2 机构动作效率
经过多次反复试验,测得机构运行一次的时间为20.2s。根据一个运动循环播种量为12粒,由此可以计算得到嫁接用种子定向播种机的播种效率为2 138粒/h。
5 结论
1)利用南瓜大粒种子的外形特点,采用弧线仿形结构,对嫁接用苗的种子达到了按长轴方向排列一致播种的效果。用图像处理方法测得试验后长轴的平均偏转角为15°,均小于30°,可以满足嫁接要求。
2)创新设计了一套振动种盘搭配两套种子定向机构,实现了往复式的无空行程取种和播种,一个循环可以播种12粒,极大地提高了定向播种的效率。
[1] 郭世荣,孙锦,束胜,等.我国设施园艺概况及发展趋势[J].中国蔬菜,2012(18):1-14.
[2] 辜松.蔬菜工厂化嫁接育苗系统的发展现状[J].农机化研究,2005(6):52-54.
[3] 邢国明,亢秀萍,姬青云,等.茄果类蔬菜嫁接栽培研究进展[J].沈阳农业大学学报,2000(1):144-146.
[4] 辜松,江林斌.国内外蔬菜嫁接机的发展现状[J].东北农业大学学报,2007(6):847-851.
[5] 宋永海. 黄瓜嫁接技术[J].现代农业科技,2010(20):145-147.
[6] 陈亚丽,朱为民,刘龙洲.嫁接技术在葫芦科作物中的应用[J].长江蔬菜,2012(6):6-10.
[7] 高贵武,蔡善儒,付君,等.新型气吸式播种机的设计与试验[J].农业技术与装备,2011(20):41-42.
[8] 张德文,李林,王惠民.精密播种机械[M].北京:农业出版社,1982.
[9] 孙锦山,杨庆华,阮健.气动多吸盘爬壁机器人[J].液压与气动,2005(8):56-59.
[10] 庄森,田盈辉,蒋晶,等.真空气吸式播种器吸嘴流场的研究[J].农机化研究,2007(11):83-86.Abstract ID:1003-188X(2017)04-0073-EA
Research Design on a Directional Seeding Mechanism for Big Seeds of Grafting
Kong Yanshan, Zhang Tiezhong, Chu Jia, Zhang Libo, Zhang Wenbo, Liu Zhan
(College of Engineering,China Agricultural University,Beijing 100083,China)
In the process of protected horticulture, planters have to adjust artificially the orientation of cotyledons as the grafting machine has a much higher requirement for seedlings. As a consequence of that, the grafting efficiency is low and the labor expenditure is high. To solve this problem, we design an oriented seeding mechanism which can orient the long axes of seeds and keep the sprouting cotyledons in the same direction.This design contains vibratory seed tray mechanism, getting & delivering seed mechanism, seed orientation mechanism and integrated framework, and it utilizes OMRON CPM1A PLC as the control component. According to the experimental results, the mechanism can significantly improve the seeding efficiency with an excellent working performance.
vibratory seedling tray;directional seeding;modeling board; PLC
2016-03-29
国家高技术研究发展计划项目(2012AA10A506-2);公益性行业(农业)科技专项(201303014-09)
孔艳山(1991-),男,河南开封人,硕士研究生,(E-mail)kys_1219@163.com。
张铁中(1957-),男,河北邢台人,教授,博士生导师,(E-mail)zhangtz56@163.com。
S223.1
A
1003-188X(2017)04-0073-05
猜你喜欢
Chinese Physics B(2022年11期)2022-11-21
机械管理开发(2022年1期)2022-03-24
装备维修技术(2022年3期)2021-12-06
中学数学研究(广东)(2021年19期)2021-11-19
建材发展导向(2021年6期)2021-06-09
矿山机械(2021年3期)2021-03-25
中学数学研究(江西)(2019年12期)2020-01-10
植物资源与环境学报(2017年3期)2017-10-12
中国新技术新产品(2014年1期)2014-11-16
中国蔬菜(2012年6期)2012-02-23
