
舰船全天时高精度容错组合导航系统设计与验证
2017-12-15 02:32
计算机测量与控制 2017年11期
(中国人民解放军92941部队95分队,辽宁 葫芦岛 125001)
舰船全天时高精度容错组合导航系统设计与验证
查月
(中国人民解放军92941部队95分队,辽宁葫芦岛125001)
针对单一导航系统的性能不能满足全天候、全天时、高精度、高可靠性的舰船导航信息测量要求,提出了一种基于多传感器信息融合(MSF,Multi-SensorFusion)的容错组合导航系统方案;方案中增加了子滤波器故障隔离检测模块,对系统状态进行全参量最优估计和容错处理;对融合后的系统精度和故障隔离能力进行了试验仿真验证,结果表明所设计方案能够提高系统的精度和可靠性。
多传感器信息融合;联邦滤波;全天时测量;容错;故障检测;仿真验证
0 前言
惯性导航系统(INS)是自主式的导航系统,利用惯性器 件对载体的运动测量,不依赖外信息工作,具有自主性强、输出信息连续,短时精度高、但误差随时间积累,因而难以长时间的独立工作。卫星导航系统定位和测速精度高、误差不随时间积累,但易被干扰且不能提供高精度载体的姿态信息,如全球定位系统(GPS)是非自主式的,应用易受外界环境及美国GPS政策等多方面的限制。因此,GPS 不宜单独作为唯一的导航设备,尤其是用于军事的导航设备,而只能作为辅助的导航设备。北斗卫星导航系统(BDS)为我国自主研发的卫星导航系统,除能够提供高精度、高可靠性定位测速授时服务外,还具有短报文通信能力。多普勒导航系统(DOPPLER) 能够在舰船上自主的测量舰船对地的绝对速度,反应速度快,使用方便;由于发射波束窄,发射角度陡,因此抗干扰性和隐蔽性好,测速度精度高且误差不随时间发散,但由于作用距离有限,超过作用距离的海深处只能测量相对水的速度[1-2]。
现代舰船作战任务对导航系统的精确性可靠性提出了非常高的要求,促使舰船惯性导航系统向综合化、智能化、容错化发展。将惯性导航系统和卫星导航系统、多普勒导航系统系统组合起来,利用信息融合技术将信息互补,达到提高组合后的导航系统的精度和容错性能的目的[3]。
1 舰船全天时高精度容错组合导航系统方案设计
1.1 INS误差模型
1.1.1 平台误差角方程
(1)
(2)

(3)
其中:α,β和γ分别为沿东向轴、北向轴和方位轴转过的误差角;λ,φ分别为经度、纬度;εx,εy和εz分别为北向、东向和方位陀螺漂移;RM,RN分别为地球子午面和卯酉面曲率半径。
1.1.2 速度误差方程

(4)
(5)
其中:δVe,δVn分别为东向、北向速度误差;fe,fn和fζ分别为北向、东向和垂向加速度输出比力值;▽x,▽y分别为北向、东向加速度计零位。
1.1.3 位置误差方程
(6)
(7)
其中:δλ,δφ分别为经度、纬度误差。
1.1.4 陀螺漂移误差模型
惯性导航系统主要误差源为东向、北向和方位陀螺漂移εx、εy、εz。陀螺漂移包括常值漂移和随机漂移,随机漂移为一阶马尔科夫过程,则:
(8)

1.2 INS/BDS/GPS/DOPPLER组合导航系统结构设计
舰船导航系统的惯性导航系统、卫星导航系统、多普勒导航系统各自工作,互不相关,且信息随时可能中断,需要惯性导航系统将获得的各导航信息进行信息融合,将融合后的信息作为准确的外信息对性导航系统的主要误差和误差源进行估计 和补偿[4-5]。因此,设计的INS/BDS/GPS/DOPPLER联邦滤波器结构以平台式惯导作为公共参考系统,以BDS、GPS、多普勒测速仪作为辅助导航系统。即由一个主滤波器(MF)和3个子滤波器(LF)组成,其中子滤波器LF1和子滤波器LF2为位置信息组合,子滤波器LF3为速度组合。联邦滤波器结构如图1所示。

图1 INS/BDS/GPS/DOPPLER联邦滤波器结构
LF1、LF2、LF3均为常规卡尔曼滤波器,子滤波器处理过的信息送入故障检测器,故障检测能够保证观测信息短时间丢失或出现较大偏差时将隔离相应子滤波器信息,从而错误信息不会污染主滤波器。信息的重构是以各个分系统的状态评估为基础,目的是保证系统有较强的容错能力[5-6]。
考虑到反馈校正,滤波器故障会直接污染惯导输出,使可靠 性降低,而输出校正,滤波器故障不会影响惯导工作,故本方案设定了校正周期,在校正周期结束时,采用反馈校正的方式,在校正周期期间,采用输出校正方式,这样既保证了惯导系统的稳定性,又提高了组合工作期间INS导航数据的输出精度。
1.2.1 容错组合导航系统状态方程
以INS误差方程为基础,将陀螺常值漂移和随机漂移扩充为系统的状态,由于通常加速度计误差较小,在滤波器的状态方程中将其省略,因此形成15阶的状态方程。

(9)

1.2.2 容错组合导航系统观测方程
1.2.2.1 子滤波器LF1的观测方程
由于GPS在位置精度上有绝对优势,利用惯导系统与GPS组合成子滤波器LF1,将惯导系统与GPS位置信息之差作为观测量,观测周期为10 s。子滤波器LF1的系统观测方程为:

(10)
其中:φI,λI为INS的纬度、经度,φG,λG为GPS的纬度、经度,H1为2×15维观测矩阵,
H1(1,1)=1,H1(2,2)=1,其余元素都等于零;V1(t)为观测噪声矩阵,E[V1V1T] =R1,R1为2×2维观测噪声方差矩阵。
1.2.2.2 子滤波器LF2的系统的观测方程
(1)空气滤清器阻塞清洗空气滤清器芯子或清除指质滤芯上的灰尘,必要时应更换,以及检查机油平面是否正常。(2)排气管阻塞或接管过长,转弯半径太小、弯头过多清除排气管内积碳,重新排气接管,弯头不能多余三个,并有足够大的排气截面。
由于BDS为我国自主导航定位系统,精度较高,利用BDS与GPS组合成子滤波器LF2,,将BDS与GPS位置信息之差作为观测量,观测周期为10 s。子滤波器LF2的系统观测方程为:

(11)
其中:φB,λB为BDS纬度、经度;H2为2×15维观测矩阵,H2(1,1)=1,H2(2,2)=1,其余元素都等于零;V2(t)为观测噪声矩阵,E[V2V2T] =R2,R2为2×2维观测噪声方差矩阵。
1.2.2.3 子滤波器LF3的观测方程为
由于多普勒导航系统能够完全自主测速且精度很高,利用多普勒导航系统与GPS组合成子滤波器LF3,将惯导与多普勒导航系统速度信息之差作为观测量,观测周期为10 s。子滤波器LF3的系统观测方程为:

(12)
其中:VxI,VyI为惯导系统东向、北向速度;VxD,VyD为多普勒的东向、北向速度;H3为2×15维观测矩阵,H3(1,3)=1,H3(2,4)=1,其余元素都等于零;V3(t)为观测噪声矩阵,E[V3V3T] =R3,R3为2×2为观测噪声方差矩阵。
2 系统仿真验证与分析
2.1 仿真条件
容错组合导航系统初始条件设定位置为北纬40°40′,东经121°00′,陀螺漂移为常值是εcx=0.005°/h,εcy=0.01°/h,εcz=0.01°/h,随机漂移为一阶markov过程,相关时间为1小时,σrx=0.001°/h,σry=0.001°/h,σrz=0.001°/h; 两个水平加速度计零位常值为5×10-5g,随机部分为白噪声N(0,σ2),其中σ=5×10-6g;其余状态变量的初值为零。
GPS水平定位精度为30 m(1 σ);BDS水平定位精度为100 m(1 σ);DOPPLER水平测速精度为0.25 kn(1 σ)。系统时间更新为1 s,观测更新10 s,反馈校正周期为4 h。
2.2 系统仿真流程
利用Simulink仿真功能,根据惯导的误差方程建立仿真模型,分别按照设置的仿真条件和以下两种方式进行仿真;
2.2.1 传统的位置综合校准方式仿真
惯导系统自主工作2小时后,每4h利用外部辅助位置信息对惯导系统进行综合校正。系统仿真试验时间为12小时,其间BDS系统一直保持正常工作。
2.2.2 容错组合导航系统滤波方式仿真
首先惯导系统独立自主工作2小时,然后容错组合导航系统开始进入组合滤波工作模式,3个子滤波器同时工作,系统每4小时系统进行一次综合校正。仿真试验第2~3小时人为中断GPS信息,仿真试验第3~4小时人为中断多普勒导航系统信息,仿真试验第5小时人为将多普勒导航系统误差增大到10kn,持续5分钟后恢复正常,仿真试验第9小时,人为增大GPS经纬度、航向误差均到10′,持续5分钟后恢复正常。试验中检查系统在组合工作模式下的精度和子滤波器有持续非正常观测信息输入时或信息中断时的容错性能。检查组合导航系统精度与故障隔离效果。系统仿真流程图见图2。
图2 系统仿真流程图
3 试验结果与分析
组合导航系统仿真时间为12小时,组合滤波过程中只修正系统显示量,综合校正时校正系统值,仿真结果见图3。由两种仿真方式对比可以得出:
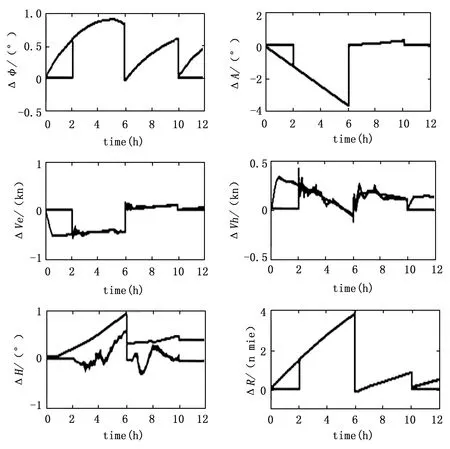
图3 组合导航系统误差曲线
1)两种工作方式下,系统经度误差和纬度误差估计比较准确,系统位置精度提高;
2)组合滤波方式下,由于组合滤波过程中,GPS和多普勒导航系统时而中断,时而突跳,,使得速度误差估计有小量波动,总体精度提高;
3)与传统位置综合校正方式比较,组合滤波方式下,航向误差估计比较准确,系统精度有较大提高;
4)组合滤波方式下,GPS信息中断和和多普勒导航系统误差引入并未对组合系统造成影响,子滤波器的故障得到了理想的检测与隔离,系统达到了能够全天时工作并具有很好的精度和容错性能。
4 结论
针对舰船单一导航系统测量精度低、可靠性差、测量不连续等问题,设计了全天时高精度容错组合导航系统,并对系统的结构、误差模型、滤波算法、仿真流程进行了详细的介绍,并通过两种不同的组合导航方式方法进行仿真,验证了多传感 器组合导航系统方案的有效性。仿真试验结果表明,多传感器组合导航系统能够抑制惯导系统误差发散,提高组合导航系统精度,通过引入辅助导航系统不可靠信息,验证了组合导航系统故障检测效果及容错性能,有效提高了系统的可靠性。
[1] 付梦印,邓志红,等. Kalman滤波理论及其在导航系统中的应用[M].北京:科学出版社,2003.
[2] 王光鼎,张升康,杨汝良.一种基于卡尔曼滤波处理的北斗卫星天文组合导航自适应野值剔除方法[J].电子与信息学报,2008,30(8) :1981-1984.
[3] 郝顺义, 柴竹琴. 某导航系统解析冗余与容错技术研究[J]. 弹箭与制导学报,2002,22(4):25-27.
[4] 舒东亮.惯性基容错组合导航系统设计理论研究[D].西安:西北工业大学,2007.
[5] 丁宏升,刘 峰.基于联邦滤波的容错组合导航系统仿真分析[J].航空计算技术,2013,43(5):132-134.
[6] 熊 智,邵 慧,华 冰,等.改进故障隔离的容错联邦滤波[J].航空学报,2015,36(3):929-938.
DesignandValidationforaAll-TimeHigh-PrecisionFault-TolerantIntegratedNavigationSystemofaShip
Cha Yue
(Unit 95 of 92431 Troop,Huludao 125001,China)
In view of the performance of a single navigation system is unable to satisfy the requirements for measuring navigation information of the ships of all-weather, all-time, high-precision and high reliability, a solution of a fault-tolerant integrated navigation system based on Multi-Sensor Fusion (MSF) is proposed in this paper. The solution, which has an additional sub-filter fault detection module, makes optimal estimate and fault-tolerant treatment to all parameters of the system status. Afterwards, an experimental simulation validation is done to the precision and fault isolation ability of the fused system and the results show that the accuracy and reliability of the system are improved by the designed solution.
multi-sensor fusion (MSF); federal filtering; all-time measurement; fault-tolerance; fault detection; simulation validation
2017-03-27;
2017-05-15。
查 月(1977-),女,硕士,高级工程师,主要从事导航系统试验方向的研究。
1671-4598(2017)11-0280-04
10.16526/j.cnki.11-4762/tp.2017.11.071
U666.1
A
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
国学(2020年1期)2020-06-29
中国医学影像学杂志(2018年9期)2018-10-17
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
北京航空航天大学学报(2018年1期)2018-04-20
摄影之友(影像视觉)(2017年10期)2017-11-07
摄影之友(影像视觉)(2017年1期)2017-07-18
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
