
卫星姿轨控半物理仿真测试系统
2017-12-15 00:52,,
计算机测量与控制 2017年11期
, ,
(上海航天控制技术研究所,上海 201109)
卫星姿轨控半物理仿真测试系统

(上海航天控制技术研究所,上海201109)
为了保证卫星发射前的地面姿轨控半物理试验的顺利进行,研制了姿轨控分系统半物理仿真地面测试系统;为了满足相关类似卫星型号的通用化测试,本套仿真测试系统采用通用模块化的设计架构,同时采用现今主流的PXI总线测试技术(配合VPC转接电路板);使用标准通用cPCI总线板卡以及部分自制FPGA可编程cPCI总线板卡实现各测试模块的功能;这种架构不仅能实现功能模块化,便于后续的功能扩展及维修,同时具有可靠性高、搭建时间快、可维护性强的优点,且体积小,稳定性强,能适应不同测试对象的测试环境条件,适合长途运输;文章介绍了系统的总体设计结构,重点介绍了模拟总体电源、动力学仿真机、电信号源、程序加载以及外围设备等硬件系统功能,以及相关配套软件的基本功能;测试系统经过与卫星的星地联试,功能性及使用性均得到了验证,测试结论符合设计之初功能性及通用化的构想。
半物理仿真;通用性;高精度;星地联试
0 引言
控制分系统负责卫星变轨控制的实现,是卫星各分系统中控制难度较大的一个分系统[1],如果该系统出现故障将直接导致卫星不能完成既定任务,甚至使其变成一个空间垃圾[2]。卫星在研制不同阶段对姿轨控的设计任务和试验验证任务要求不同,因此地面仿真测时地面测试系统也应满足卫星不同阶段仿真试验任务,使得能在卫星研制的不同阶段进行充分的仿真测试验证以保证卫星在轨任务的成功。半物理仿真试验使用真实的控制电路和星载姿轨控计算机软硬件、真实的敏感器及其接口电路,用卫星动力学和执行机构数学仿真软件驱动机械转台,模拟卫星的姿态和轨道运动。为了保证某型号卫星姿轨控分系统(GNC)顺利完成总体试验大纲规定的开环测试、闭环测试以及半物理仿真试验等功能,自动化测试是研制卫星姿轨控分系统的重要手段[3],姿轨控分系统的半物理测试主要是实现系统的开闭环测试以及接口对接测试,除了半物理测试外姿控分系统还需要进行数学仿真测试以及星地联试,要求半物理仿真测试设备以及星地联试的设备各独立模块间能够互为备份,所以要求测试设备具备一定的通用性。因此可研制一套模块化通用测量设备和通用软件搭建的自动化测试系统[4]。考虑功能通用及扩展性,设备采用PXI总线测试技术(配合VPC转接电路板),使用标准通用cPCI总线板卡以及部分自制FPGA可编程cPCI总线板卡实现各测试模块的功能,这种架构的优点包括可靠性高、搭建时间快、可维护性强等。
1 半物理自动化测试系统的设计
半物理仿真系统主要用于对姿轨控单机状态,姿轨控系统工作流程、算法设计的正确性和合理性以及星载姿轨控软件的正确性进行验证[5]。
1.1 测试系统总体设计
用户对半物理测试系统以及星地联试测试系统的各项要求如表1所示。
通过测试网络将各设备单机连接在一起,其组成主要包括供电电源、动力学仿真计算机(姿态)、轨道动力学计算机、采集计算机、故障模拟机以及相关外围设备,各部分的详细功能在本文后面部分会有介绍。

表1 系统测试技术要求
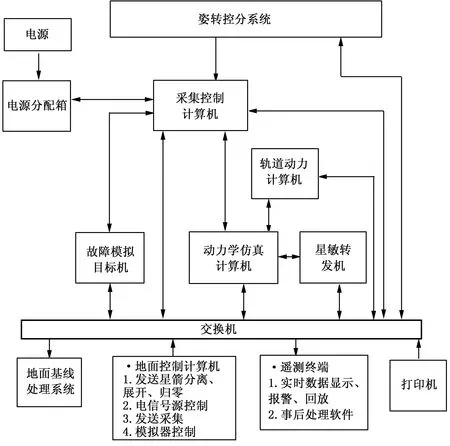
图1 卫星半物理仿真地面测试系统组成
PXI总线兼备了VXI总线的易维护性、可靠性以及结构简单以及PCI总线的高速性的优点,并且可扩展性强,其数据传输速率约为 132~264 MB/s。
1.2 测试系统硬件结构设计
1.2.1 测试系统硬件结构设计
用户要求半物理测试系统能够模拟供电电路提供16路直流电源供电,其中11路是给综合线路盒,2路给星上计算机,3路给阀门线路盒。根据用户对直流电源模拟供电部分的要求,本测试系统采用程控电源供电方式,输出星上29±1 V直流电源,选用安捷伦公司Agilent 6673A配合2台自制的8路的电源分配箱给单机配电,经过实际测试性能满足技术要求。
模拟总体电路还包括一路星箭分离信号发送接口和6路太阳阵及SAR天线的展开信号接口。星箭分离信号是无源触点信号,分离前、后分别为接通和断开状态;展开信号为双电平信号,展开前为低电平(电压0~1 V),展开后为高电平(电压3.5~5 V)。采用两块自研PXI接口状态控制板卡实现,每块板卡可提供4路0 V/10 V输出,4路0 V/5 V输出,4路继电器信号输出。
1.2.2 动力学仿真功能
动力学仿真的功能主要是模拟卫星在太空轨道中的运动状态,以检测卫星的各项姿轨控性能指标。所谓姿轨控性能,指的就是卫星的姿态及轨道控制性能,卫星由运载火箭从地面送至预定初始轨道后,其后续的姿态及轨道控制就要靠其自身的执行机构完成了,这是一个非常严密复杂的闭环系统,主要由测量部件、控制器和执行部件组成,通过太阳敏感器、地球敏感器等测量部件测得卫星相对于系统坐标系的姿态和方位数据。 通过由AOCS(姿轨控计算机)为核心的控制器分析计算,控制执行机构控制卫星的变轨及飞行姿态。
使用凌华公司的代号PXIS-2700的18槽机箱以及PXI-3920零槽控制器搭配若干PXI接口的功能板卡实现动力学仿真的功能,动力学仿真计算机主要完成的功能包括信号采集、动力学仿真、电信号源模拟、模拟光纤陀螺组合/半球谐振陀螺组合接口、三轴转台、动态星模的控制接口。
飞轮接口包括飞轮转速信号和飞轮转向信号的采集。飞轮转速信号为脉冲量差分信号,正负电平范围分别为+3.0~+5.5 V、-5.5~-3.0 V,要求能够采集到单位周期内转速脉冲数;飞轮转向信号采用差分方式传输,输出“1”(+3.0~+5.5 V)代表正转,输出“0”(-5.5~-3.0 V)代表负转,能区分出正转和负转状态即可。采用一块自研PXI接口飞轮信号采集板卡实现,每块板卡可提供8路转速信号以及8路转向信号的采集。
测试系统需要对阀门线路盒输出的20路信号进行I/O采集,动力学仿真机根据采集到的数据对姿轨控分系统进行闭环控制,采用了凌华公司生产的Cpci-7432多功能IO采集板卡实现该功能,该型号板卡最多能同时采集32路IO信号。
所有的电信号源测试接口都是通过标准的RS-422通讯接口实现的(2路),采用一块自研的PXI接口8路RS422串口通讯板卡实现。
测试系统的模拟综合电子部分的仿真测试功能全部在采集控制计算机上实现,采集控制机由1台凌华PXIS-2700机箱、1块PXI-3950零槽控制器以及若干块PXI测试板卡组成,具体使用1块凌华Cpci-7434板卡实现32路直接遥控指令的IO接口输出,使用1块玖翼公司的AD采集板卡(PXI接口,32路)实现20路的模拟遥测电压信号量的采集,并且通过使用1块pickering公司的40-148高密度继电器矩阵卡来实现单机故障模拟切换控制的功能。
1.2.3 程序加载及遥测遥控
星载计算机的程序加载是通过RS422通讯来完成的,本测试系统使用了一块MOXA公司的Nport-4口串口线路盒实现程序加载功能,该线路盒独立供电,可通过网络交换机实现远程控制。
1.2.4 外围设备
包括中继器、推进等效器、以及相关测试一体机电脑及相关软件。
1.2.5 较以往设备整体结构的通用化改进设计
以往设计的半物理地面测试系统,动力学仿真机以及采集控制计算机机箱后部的电缆都是直接连到总体各单机或姿轨控计算机上,本文提到的这套测试系统是先将动力学仿真计算机以及采集控制计算机的相关接口信号连接到一块VPC信号转接电路板,最后信号是从VPC信号转接电路板上的VPC接插件上到达相关单机以及姿轨控计算机上。这样改进后的优点主要是设备的美观性比以前有显著增强,另外就是设备内部测试功能的通用性得到显著加强(从机箱出来一直到VPC转接面板上VPC接插件出都是各型号间可以完全通用和复用的)。
1.3 测试系统软件
本测试系统使用的软件沿用了以往所做常规姿轨控分系统半物理测试设备的软件架构。但由于由于动力学仿真计算机上的软件主要完成各种模型解算、硬件 I/O 端口的读写操作以及其它资源访问操作等,且需要模拟仿真实时的飞行环境,所以本软件需要极高的实时性,动力学仿真软件的仿真周期一般为几个毫秒,要求操作系统能实现确定的实时线程调度。在进行姿轨控仿真测试时,从集成化与小型化方面考虑,各主要功能模块可以由动力学仿真软件直接控制和采集。而其他需要专用设备实现的功能模块如星敏感器电信号源等,动力学仿真计算机可以采用标准接口如 RS422 的形式输出控制信号。
综合功能及实时性考虑,本测试系统模拟数管软件使用C++Builder平台开发,在Windows XP操作系统中运行,根据总体通讯协议通过1553B总线向星载软件进行注数或者接收遥测数据。远控软件主要完成动力学初始参数的设定以及所有测试系统需要的操作指令的自动执行,实现自动化测试。PXI采集控制软件基于软件通用化的架构思想采用Labview开发平台开发而成,针对每一块板卡的测试功能独立开发子模块。动力学模型仿真软件用于实现动力学模型。数据库存储软件主要负责试验数据的存储和向终端机的广播。终端显示软件则是负责试验数据的实时显示。
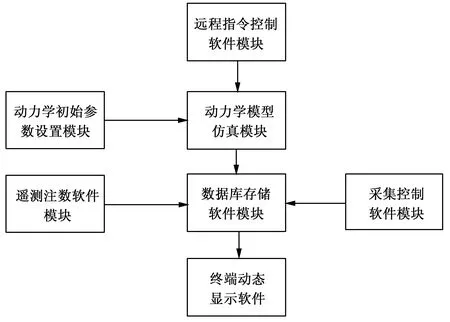
图2 地面测试系统软件组成结构
2 试验
在硬件及软件功能调试通过后,系统将对卫星的控制分系统进行测试大纲要求的各项试验,以此来验证卫星的姿轨控功能。姿轨控分系统在系统级测试中最重要的是要进行开环测试、闭环测试和故障应急
模式的测试,这项测试是对姿轨控分系统综合性能的检查和验证。测试的基本过程是将姿轨控分系统设置在不同工作模式下和部件在不同组态下,实现对姿态控制功能的设置和控制指标的测试。
2.1 开环测试
开环测试环境下主要测试 AOCS 的开路技术指标和各组部件的功能、性能指标及连接关系,包括各控制回路(由敏感器、控制器和动力学仿真软件组成)的增益、各执行机构(飞轮、喷气推力器、太阳帆板驱动机构等)的控制性能、各部件连接极性、故障安全电路功能、遥测遥控接口等。
开环测试的流程为:控制计算机通过遥控接口向 ACC 发遥控指令,并由网络将测试命令字送动力学计算机和数据处理计算机,动力学计算机在收到测试命令后,根据不同命令字向敏感器(或敏感器模拟器)输出相应的姿态误差,姿态误差通过接口送给姿轨控计算机,姿轨控计算机的应用软件根据控制算法计算出作用在卫星上的控制信号,送中心控制器 ACC,并且每隔一帧将数据送地面遥测模拟接口,控制计算机将数据送给数据处理、存储和显示计算机,从而完成整个开环测试。
2.2 闭环测试
闭环测试是整个卫星姿轨控半物理仿真测试的重点,其测试目的是检查 AOCS 的各种工作模式下的功能和性能。在闭环测试时,需将整个 AOCS 各部件连成闭合回路,模拟卫星正常在轨运行的各种状态模式,然后在此闭环运行条件下测试验证 AOCS 的各种功能、性能指标,模拟整个发射入轨至在轨全过程的各种工作模式的运行和转换,同时监测 AOCS 在闭环运行条件下与其他分系统的功能、性能匹配和电磁兼容性等技术指标。
2.3 故障应急模式
除了开环和闭环测试外,为了应对卫星在飞行期间可能出现的 系统故障,姿轨控计算机还具备故障应急处理软件。根据故障模式的不同,有的在动力学不方便设置时可以在开环模式下完成测试,有的可以在闭环模式下实现测试。
按照测试大纲试验考核,本测试系统的各项指标达到了用户提出的技术要求,测试系统能够满足姿轨控分系统参加整星试验的测试要求,且功能覆盖了以往类似型号卫星的测试需求,测试系统的横向通用性得到了充分验证。按照以往测试习惯,针对半物理仿真试验和星地联试试验需要独立设计两套不同的地面测试设备,且两套设备互不通用,本测试系统针对这一问题在设计之初也进行了充分考虑,现只需要同一套设备投产两套即可同时满足半物理仿真试验以及星地联试试验的要求,大幅减少了设计及生产成本,节约了人力物力。并且设备中的硬件模块全是采用相同型号,可以互为备份,软件可以相互兼容,研制周期和研制成本均得到明显减少。
3 结论
本文对某卫星姿轨控分系统半物理地面测试系统的设计进行了研究。介绍了测试系统的总体设计、硬件结构设计以及测试系统的软件结构,并针对用户对于地面测试系统的通用性要求做出了相应的设计考虑,本测试系统具备了模块化、通用化、小型化以及可靠性强的优点,经过试验验证,本半物理地面测试系统能够分别满足某卫星姿轨控分系统半物理仿真试验和参加整星试验的测试需求,可以为后续的整星测试系统提供备份,达到了设计要求。
[1] 王晓明,戴居峰.嫦娥一号卫星控制分系统地面测试系统设计[J].航天器工程,2008,17(2):94-98.
[2] 林来兴.最近十年航天器制导、导航与控制(GNC)控制系统研究[J].北京:控制工程,2004(1):1-8.
[3] 徐福祥.卫星工程[M].北京:中国宇航出版社,2002.
[4] 余亚敏,刘振刚,徐家国.萤火一号火星探测器姿轨控分系统测试设备研究.上海航天,2013,30(4):236-239.
[5] 熊淑杰,张 锐,白 涛.卫星姿轨控半物理仿真试验系统架构研究.系统仿真学报,2014,26(7):1487-1491.
ResearchonSatelliteAOCSSemi-TestSimulationTestSystem
Zhang Yiwen, Liu Zhao, Chen Hang
(Shanghai Institute of Spaceflight Control Technology, Shanghai 201109, China)
In order to keep the satellite AOCS (Attitude Trajectory Control System) semi-physical test smoothly, the ground testing system of AOCS semi-physical simulation was designed. In order to meet the universal test of similar satellite models,the simulation test system adopts a general modular desigh framework,.As the same time,the current mainstream PXI bus testing technology is adopted cooperating with VPC switching circuit board.The function of each module is realized by using standard cPCI bus card and some home-made FPGA programmable cPCI bus card.This architecture can not only realize the function modularization,but also facilitate the subsequent function expansion and maintenance.Meanwhile,the utility model has the advantages of high reliability,fast construction time and strong maintainability,and has the advantages of small size and strong stability,and can be adapted to test environment conditions of different test objects,and is suitable for long-distance transportation.This paper introduces the overall design structure of the system,the overall power simulation, dynamic simulator, electrical source interface, programming load application interface, peripheral equipment and other hardware were introduced respectively. The test system has been verified by satellite and ground test.The function and usability of the test system have been verified.The test result accords with the conception of design function and generalization at the beginning of the design.
semi-simulation; universality; high precision; satellite and ground joint test
2017-05-03;
2017-07-13。
张怡文(1985-),女,上海人,工程师,主要从事卫星及运载火箭地面测试系统硬件及软件开发,自动化测试测量方向的研究。
1671-4598(2017)11-0001-03
10.16526/j.cnki.11-4762/tp.2017.11.001
TP273
A
猜你喜欢
空气动力学学报(2022年4期)2022-08-23
电子世界(2022年1期)2022-07-23
黑龙江大学自然科学学报(2022年1期)2022-03-29
军民两用技术与产品(2021年10期)2021-11-25
铁道通信信号(2020年8期)2020-02-06
科学家(2019年3期)2019-08-18
电子制作(2017年23期)2017-02-02
科学与财富(2016年28期)2016-10-14
火控雷达技术(2016年3期)2016-02-06
浙江大学学报(工学版)(2015年2期)2015-05-30
