基于视觉技术的非合作航天器相对位姿测量方法
2017-11-27 05:46孙增玉
宇航计测技术 2017年4期
孙增玉 高 越
(北京航天计量测试技术研究所,北京 100076)
基于视觉技术的非合作航天器相对位姿测量方法
孙增玉 高 越
(北京航天计量测试技术研究所,北京 100076)
提出一种基于特征信息融合的非合作目标相对位姿测量方法,该方法以航天器自有的特征信息作为识别目标,采用椭圆轮廓和特征角点相结合的方法对非合作目标特征进行识别,解决了位姿测量中无合作标志器提供理想特征信息的问题。针对典型的卫星目标模型,进行了非合作目标相对位置姿态测量方法的验证试验,实验结果表明:该方法可以成功识别目标物体并对目标物体进行准确定位。
非合作航天器 位姿测量 视觉技术
1 引 言
随着近些年计算机技术、机器人技术和传感技术的迅猛发展,以航天器在轨维护、废弃航天器清理、空间攻防、交会对接等为目的的空间目标姿态测量技术成为了空间机器人领域的热点研究方向。空间目标相对位姿参数的测量主要是利用装载在飞行器上的各种摄影测量系统、光电传感器及光电跟踪设备完成目标飞行器的相对距离、姿态的测量,而绝大部分的目标飞行器都没有辅助测量的标志器,即非合作目标[1~3]。
在非合作目标位姿测量的目标逼近阶段大多采用视觉系统进行位姿测量,对于高精确末端测量任务,还需进行高精度的激光测距。我国在空间非合作目标捕获方面的研究起步较晚,目前还没有公布相关计划。
本文以典型的卫星目标模型为研究对象,在充分借鉴国内外研究经验的基础上,开展针对基于立体视觉的位姿测量方法研究,采用椭圆轮廓和特征角点相结合的方法对非合作目标特征进行识别,并结合双缓存并行处理技术,保证识别效果的同时实现了在线位姿解算,降低时间延迟对测量精度的影响。
2 立体视觉测量系统建模
立体视觉测量相对位姿是由双目相机采集得到的像平面二维信息,通过空间中各坐标系间的转换关系得到目标在笛卡尔空间的三维坐标信息来实现的。其系统构成简单、功耗小,仅由两台测量相机及图像采集解算计算机组成,固定安装在本体卫星上。
测量系统的数学模型如图 1所示。首先建立5个空间坐标系,即本体卫星坐标系O0-X0Y0Z0、空间目标坐标系OP-XPYPZP、相机坐标系OL-XLYLZL和OR-XRYRZR、相机图像坐标系OL-xLyL以及OR-xRyR和测量坐标系OM-XMYMZM。
相机成像模型是相机图像平面与真实三维世界间联系的纽带,建立了真实世界中3D坐标(单位:mm)与相机中2D坐标(单位为像素)之间的转换关系。
空间点P在左右两个相机上成像,像点为pL和pR,每个相机的镜头光学中心(OL和OR)和像点均能确定一条射线(分别为OLpL和ORpR),两条射线的交点即是被测空间点(P)。
设左相机坐标系OL-XLYLZL为测量坐标系,右相机坐标系OR-XRYRZR相对于测量坐标系的空间关系可用旋转矩阵R和平移矩阵T表示,左、右图像的像点坐标分别为(xL,yL)和(xL,yL),则空间点P的三维坐标(X,Y,Z)可表示为
(1)
式中:fL、fR——分别表示左、右相机的有效焦距。矩阵R和T为
R、T即为双目立体视觉系统的外部参数,通过外部参数标定可以获得,进行精确的视觉测量还需要考虑相机的镜头畸变等因素,可以通过建立非线性模型并进行内部参数标定来实现。
在合作目标位姿测量中,利用上述原理解算目标航天器上合作目标特征点的空间三维坐标,当特征点个数大于3个时,基于刚体变换原理,可以解算航天器在测量坐标系下的位置和姿态。再利用双目测量系统与本体卫星的位置关系,即可解算获得被测航天器与本体卫星的相对位姿。
而非合作目标位置测量技术的难点在于:在没有合作识别标志器的情况下,如何提取特征信息,进而解算位置和姿态。本文针对远距离和近距离两种情况,分别提出了非合作目标的特征提取策略和位姿解算方法。
3 非合作目标的特征提取与匹配
3.1非合作目标的外形特征分析
如图2所示为典型的卫星目标模型,对它们的外形特征进行分析,可以发现最典型的几何特征为圆特征和角点特征。
对于具体可供测量的特征来说:
(1)卫星本体。常见卫星本体的形状以圆柱体、长方体和多面体为主。其中圆柱体的截面为圆面,它为观测提供了圆面特征。本目标卫星本体为长方体,在二维图中很容易出现角点特征。
(2)太阳能帆板。除少数表面贴太阳能片的卫星外,多数卫星都采用太阳能帆板的形式为整个卫星供电。太阳能帆板一般为长方形,这为测量提供了角点特征。
(3)发动机喷嘴和星箭对接环。喷嘴和对接环都是圆环型,是典型的可被测量的圆面特征。
(4)通信天线。大部分通信天线是喇叭形的,最外部的轮廓为圆形,并且它们常常挂在外面,因此它们也是可被测量的候选目标。
在本文中选择太阳能帆板和对接框作为测量特征,在远距离位姿测量时,可以观察到整个目标卫星外形轮廓可以通过提取太阳能帆板边缘角点作为测量特征;在近距离位姿测量时,可以观测到卫星局部细节,提取卫星对接框圆形特征,进而根据非合作圆面的位姿测量算法,解算卫星姿态。
3.2角点检测
将太阳能帆板最外侧的四个角点作为提取和识别的特征,角点是二维图像亮度变化剧烈的点或图像边缘曲线上曲率极大值的点[4]。从这两个定义出发角点检测通常是着眼于图像的灰度或边缘,基于直接灰度计算方法考察的是每个像素点及其领域的灰度信息,利用这些灰度信息进行CRF函数计算,它并不依赖边缘和数学模型,这里采用Harris角点检测方法。
Harris算子的思想是,在角点处,图像的灰度梯度是不连续的,而且在角点临近的区域,梯度有两个或两个以上的不同值。算法定义了一个与自相关函数相关联的矩阵M。M的特征值与自相关函数的一阶曲率有关联,如果M的两个特征值都很大,那么就认为该点是角点。Harris角点检测的原理就是利用选定的窗口在图像不同区域移动时灰度值变化的不同决定窗口的中心点是否为角点。例如,当窗口在图像的平滑区域移动的时候,窗口在各个方向上的亮度值没有太大变化的;当窗口在边缘区域移动的时候,在边缘方向上的亮度值没有太大变化的;而当窗口在角点处移动的时候,窗口在各个方向的亮度都有变化。
算法为图像内的每一点定义自相关函数,如式(2)所示
c(x,y)=∑WI(xi,yi)-I(xi+Δx,yi+Δy)2
(2)
式中:(Δx,Δy)T——给定的位移;(xi,yi)——窗口W内的点。按照一阶泰勒级数展开,图像位移近似值如式(3)所示
(3)
(4)
此方法提出一种图像点局部结构思想,根据特征值可以分为如下几类:
a) 如果两个特征值都比较小,即为平坦区域;
b) 如果特征值中有一个值比较小,而另一个值比较大,即为边缘;
c) 如果两个特征值都很大,那么该点就是角点。
Harris算法还增加了高斯平滑的步骤,用以减小噪声对角点检测结果的影响。由于图像噪声的影响,左右相机提取的角点位置匹配误差较大,从而使最终解算获得的姿态结果误差偏大,为此,通过增大Harris算法中的高斯滤波窗口参数,获得了更稳定的角点位置,降低了左右相机对应角点的匹配误差,提高了姿态解算精度。参数改变前后,角点位置的变化情况如图3所示,其中图3(a)为参数较小时提取角点的位置,很容易受到边缘像素的影响而变化,图3(b)为参数增大后提取到的角点位置。
3.3圆面特征识别
圆形特征是二次曲线特征的一个特例,因为它在任意方向上的透视投影都是一个椭圆,精确估计一个椭圆形状的基本参数对于圆形特征三维模型的精度来说是至关重要的。通常,二次曲线可以由如下基本方程表示
Ax2+Bxy+Cy2+Dx+Ey+F=0
(5)
如图4所示,平面中任意的椭圆可以通过椭圆中心位置(xc,yc),椭圆长半轴a,短半轴b,以及长轴的转角θ来表示。其数学表达式可写为
(6)
椭圆的 5 个几何参数和一般方程中 6 个参数有如下转换关系
(7)
(8)
(9)
(10)
(11)
最小二乘是一种基于随机误差服从正态分布的最优估计方法,利用该方法拟合椭圆时,得到一组参数集合使样本点到椭圆的距离度量最小。
Pi(xi,yi) (i=1,2,…,N)为轮廓上的N个点(Ngt;6),根据最小二乘法,通过求目标函数
(12)
的最小值来确定参数A,B,C,D,E和F,再通过式(7)至(11)便可求得椭圆的几何参数。
4 位姿解算算法
根据提取的目标特征不同,位姿解算分为基于特征点的位姿解算和基于圆面特征的位姿解算。基于特征点的位姿解算应用在可以获得飞行器太阳能帆板角点特征的场合,基于刚体变换原理,利用被测物体上特征点的空间位置和其光学成像位置间的对应性求解物体的6自由度姿态参数,该方法为位姿解算的经典方法,此处不再赘述,本文将重点阐述基于圆面特征的位姿解算算法。

在立体视觉测量中两个摄像机的光轴夹角一般不大,如图5所示,图像上的极线更偏向于水平方向,所以当极线趋向于椭圆曲线的中间区域时,可以采用极线约束和左右一致性原则进行立体匹配;当极线趋向于弧顶区域和弧底区域时,极线和椭圆曲线相交产生的两个交点十分接近[5],单纯采用上述很容易引起匹配错误。本文针对平面圆立体匹配问题,将左图的椭圆分为三个区域,如图6所示分别为弧顶区、中间区和弧底区,将椭圆分为四条曲线l1、l2、l3和l4,匹配时避开容易引起错误匹配的区域,分段进行立体匹配,只匹配解算l2、l3,即可获取平面圆曲线上大部分点的三维坐标,可以通过后续方法恢复出完整的平面圆特征,并解算圆心坐标和法线方向,即对接框的位置和姿态。
5 试验验证与分析
通过搭建1∶50的缩比模型地面原理验证试验对本方法的测量精度进行了验证,试验系统如图7所示,将1∶50的卫星模型固定在精密多齿分度台的工作台面上,多齿分度台固定在直线导轨的移动滑块上,模型可随着滑块在导轨上作直线移动,视觉测量系统在距离模型约2m处对试验系统进行测量,模拟实际测量中100m的测量距离。该试验系统中由经过标定的多齿分度台提供标准姿态值,直线导轨提供标准位移值,对视觉测量系统进行验证。该验证系统虽然只提供了一维直线运动和单轴的角度运动,但由于视觉测量系统与试验装置并非正交放置,所有测量参数的解算均通过空间三维坐标获取后进行坐标转换和姿态反解获得,因此,可以通过本装置全面验证位姿测量方法的准确性。
试验中直线导轨滑台以0.5m/s的速度进行运动,视觉测量系统以20帧/s的速度进行动态图像采集,分别采用角点特征和圆面特征两种提取方法进行位置测量,特征提取效果如图8所示,其中测量结果如表1所示,试验表明本系统位置测量误差不大于0.5mm,角度测量误差不大于0.27°,优于实际空间位姿测量中提出的位置测量误差不大于2mm,角度测量误差不大于1°的测量要求。
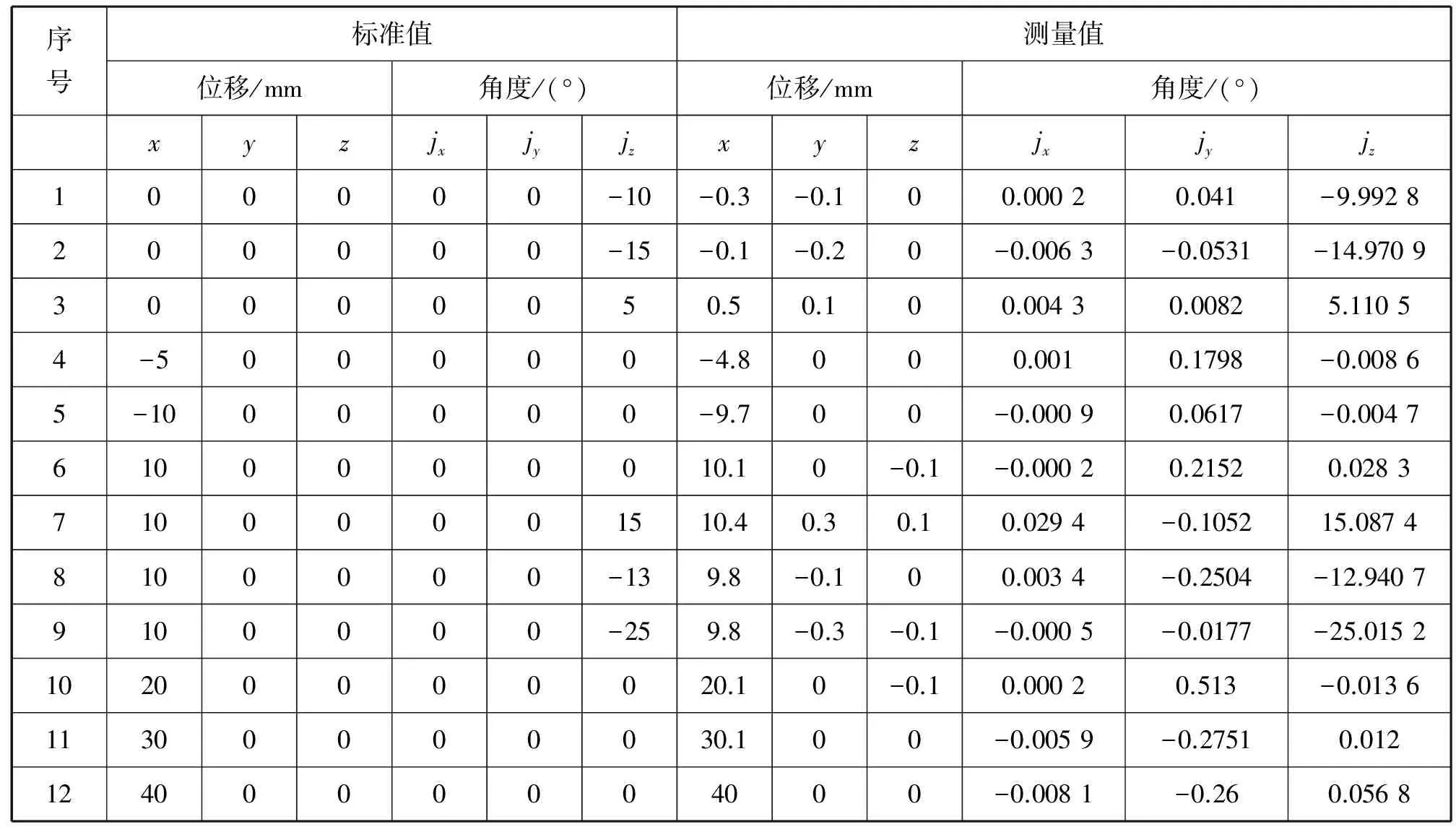
序号标准值测量值位移/mm角度/(°)位移/mm角度/(°)xyzjxjyjzxyzjxjyjz100000-10-0.3-0.100.00020.041-9.9928200000-15-0.1-0.20-0.0063-0.0531-14.970930000050.50.100.00430.00825.11054-500000-4.8000.0010.1798-0.00865-1000000-9.700-0.00090.0617-0.00476100000010.10-0.1-0.00020.21520.028371000001510.40.30.10.0294-0.105215.08748100000-139.8-0.100.0034-0.2504-12.94079100000-259.8-0.3-0.1-0.0005-0.0177-25.015210200000020.10-0.10.00020.513-0.013611300000030.100-0.0059-0.27510.0121240000004000-0.0081-0.260.0568
6 结束语
本文所介绍的系统可以实现非合作目标航天器相对运动位置姿态的实时测量,测量系统地面验证试验结果表明测量精度较高、鲁棒性和实时性好,可以满足非合作目标捕获、交会对接等任务中非合作航天器的相对位姿测量的要求。且该方法涉及的非合作目标特征提取、相对位姿解算等关键技术,同样可以应用于汽车、船舶等测量领域,具有较好的适应性,有着较好的应用前景。
[1] 王德海,洪伟,程群哲等. 基于双目立体视觉的目标识别与定位[J]. 吉林大学学报,2016 ,34(2):289~295.
[2] 温聚英,路鹰等.基于立体视觉的飞行器运动姿态测量技术及其应用[J]. 宇航计测技术, 2013(2):12~15.
[3] 张学武.视觉检测技术及智能计算[M].北京: 电子工业出版社,2013.
[4] 王向军,王研,李智.基于特征角点的目标跟踪和快速识别算法研究[J]. 光学学报, 2007, 27(02):360~363.
[5] 陈静,汤卫红.机器视觉中圆形特征的三维模型分析研究[J]. 应用光学, 2009,30(6):964~968.
RelativePositionandAttitudeMeasurementforNon-CooperativeSpacecraftbasedonBinocularVision
SUN Zeng-yu GAO Yue
(Beijing Aerospace Institute for Metrology and Measurement Technology,Beijing 100076,China)
A method based on multi-feature fusion was proposed to measure the relative position and attitude for non-cooperative spacecraft. The method solved the problem of no cooperative object in position and attitude measurement by extracting the characteristic information of the Spacecraft self,such as ellipse, corner. In order to validate the method,the non-cooperative target position and attitude measurement experiment aimed at the typical satellite model was carried into execution .Experiments show that the porposed method can recognize object successfully and locate the object accurately.
Non-Cooperative spacecraft Position and attitude measurement Binocular vision
2016-09-07,
2016-11-14
孙增玉(1984-),女,高级工程师,主要研究方向:几何量测量、摄影测量技术研究。
1000-7202(2017) 04-0001-06
10.12060/j.issn.1000-7202.2017.04.01
P236
A
猜你喜欢
现代电子技术(2022年17期)2022-09-09
计算机仿真(2021年8期)2021-11-17
现代电子技术(2021年11期)2021-06-18
中学生数理化(高中版.高二数学)(2021年12期)2021-04-26
中国科技纵横(2020年13期)2020-12-11
现代信息科技(2020年22期)2020-06-24
计算机系统应用(2020年1期)2020-01-15
新教育论坛(2019年14期)2019-09-10
山东工业技术(2019年16期)2019-07-19
科技与创新(2018年12期)2018-06-22