ADAMS在机械原理课程实践教学中的探索
2017-11-24 08:03廖达海,花拥斌,宁翔,刘玉涛,朱祚祥
教育教学论坛 2017年47期
廖达海,花拥斌,宁翔,刘玉涛,朱祚祥
摘要:将ADAMS软件引入机械原理课程教学,应用该软件对虚拟机构进行三维建模、动态仿真以及运动学分析可有效解决学生对机构组成、运动特性理解掌握困难的问题,同时极大地提高学生学习积极性,从而提高课堂教学效果。
关键词:ADAMS;机械原理;课程教学;运动学分析
中图分类号:G642.0 文献标志码:A 文章编号:1674-9324(2017)47-0140-02
一、引言
机械原理课程是机械类专业的一门主干技术基础课,在机械类系列课程体系中占有十分重要的地位[1]。传统课程教学中,只是对书本上静态的机构变位通过计算机进行动态演示,讲解内容枯燥,花费时间长,学生难以准确理解其基本原理与概念[2]。
针对上述问题,笔者结合多年的机械原理课程教学经验和科研实践,将ADAMS虚拟样机分析的应用软件与机械原理机构课程教学相结合,通过对虚拟机构进行三维建模、动态仿真以及运动学分析,克服了运算步骤烦琐的缺点,提高了课堂教学效果,并有效解决了学生对机构组成、运动特性不易掌握的问题。
二、基于ADAMS的机械原理课程实践教学案例
笔者以ADAMS软件对平面六杆机构做运动学仿真分析为例,探究ADAMS软件在机械原理课程教学中的应用。具体如图1所示为平面六杆机构运动简图,已知LBE=50mm,LEF=LED=120mm,LFD=60mm,LDA=150mm,LFC=300mm,∠FED=30°,曲柄BE以角速度ω1=πrad/s順时针旋转。求构建5滑块C点位移、速度及加速度。
1.模型建立。(1)建立机构运动实体模型。借助ADAMS软件建立平面六杆机构运动实体模型,由各构建的尺寸参数,提取ADAMS/View零件库中的连杆构建(Link),依次建立曲柄4、连杆2、摇杆1、摇杆3;再提取ADAMS/View零件库中的长方体构建(Box),建立滑块5,使其与摇杆3相连。机构运动实体模型如图2所示。
(2)建立运动副。通过对平面六杆机构的运动分析,该机构共有7个运动副,其中含有6个旋转副,含有1个移动副,机构自由度为1。提取ADAMS/View约束库中的固定副(Joint:Fixed),依次在杆EF和杆FD,杆EF和杆ED,杆FD和杆ED之间施加固定副;再提取ADAMS/View约束库中的旋转副(Joint:Revolute),依次完成曲柄4与机架,曲柄4与连杆2,连杆2与摇杆1,连杆2与摇杆3,摇杆1与机架,摇杆3与滑块5之间旋转副的施加;最后提取ADAMS/View约束库中的移动副(Joint:Translational),完成滑块5与机架之间移动副的施加。最后具体含运动副的机构运动实体模型如图3所示。
(3)建立驱动。提取ADAMS/View约束库中的旋转驱动,为曲柄BE施加顺时针的旋转驱动,设置曲柄4的旋转角速度为πrad/s,含驱动的机构运动实体模型如图4所示。
2.仿真分析。点击仿真工具按钮,设置仿真结束时间5s(曲柄用πrad/s的角速度旋转2.5周,所用时间为5s)。然后点击开始仿真工具按钮,即开始机构仿真分析。
(1)运动实体模型分析。机构开始以2s为一个周期进行运动仿真,分别选取机构仿真时间为T=0s,T=0.5s,T=1s得到机构的仿真如图5所示。
(2)运动曲线图分析。对该机构进行运动学仿真分析,借助ADAMS软件中的测量工具,得到滑块C位移,速度、加速度随时间变化曲线图。
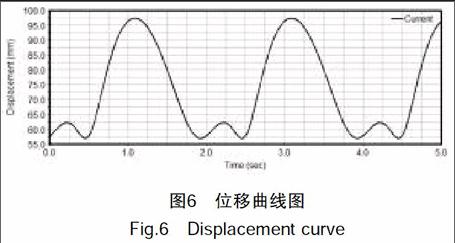
①位移曲线图。如图6位移曲线图所示,滑块C的位移随时间进行周期性变化。在第一个运动周期内,滑块C位移随着时间的增大总体呈增大趋势,并且滑块C位移在T=1.1s时达到最大值,之后滑块C位移随着时间的增大而减小。
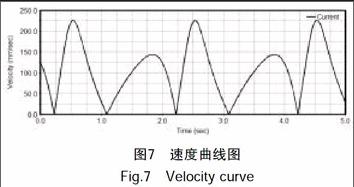
②速度曲线图。如图7速度曲线图所示,滑块C的速度随时间进行周期性变化。在第一个周期内,滑块C的速度变化较大,并且在T=0.2s与T=1.1s两个时刻速度为0。说明此时滑块C分别处在距离摇杆B最近与最远的两个位置。
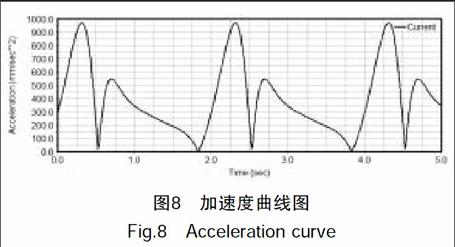
③加速度曲线图。如图8速度曲线图所示,滑块C的加速度随时间进行周期性变化。在第一个周期内,滑块C的加速度随着时间增大出现较大波动,并在T=0.3s时达到最大值,在T=1.8s时加速度为0。
三、结语
本文研究ADAMS软件与机械原理课程教学相互结合,将先进的计算机技术运用于机械原理课程教学。在教学中先对机构的基本概念与基本原理进行讲解,再利用ADAMS软件进行机构的三维建模、运动仿真与运动学分析,将枯燥且抽象的理论用计算机技术生动形象地展现出来,促进了学生机械综合素质的提升和增强了学生创新意识。
参考文献:
[1]王德伦,高媛.机械原理[M].机械工业出版社,2011.
[2]任必春.变参数欠驱动平面五杆机构混沌运动的研究[D].西南交通大学,2014.
猜你喜欢
东方教育(2016年8期)2017-01-17
大学教育(2016年11期)2016-11-16
人间(2016年26期)2016-11-03
商业会计(2016年13期)2016-10-20
大学教育(2016年7期)2016-07-27