
基于星敏感器的星图匹配方法的对比与分析
2017-11-24 07:06孔令淑陈梦张福刚
全球定位系统 2017年5期
孔令淑,陈梦,张福刚
(1.山东科技大学 测绘科学与工程学院,山东 青岛 266590; 2.北京旋极伏羲大数据技术有限公司, 北京 100094)
基于星敏感器的星图匹配方法的对比与分析
孔令淑1,陈梦1,张福刚2
(1.山东科技大学 测绘科学与工程学院,山东 青岛 266590; 2.北京旋极伏羲大数据技术有限公司, 北京 100094)
随着对地观察测绘卫星、深空探测卫星对姿态测量精度要求的提高,进一步提高星图匹配精度是当前面临的重要课题之一。星点提取和定位是星图识别的前提。本文简单探讨了新型Top-hat变换的星点提取方法,通过实验对比分析了三角形星图匹配算法和采用P向量的星图匹配算法优缺点。
星敏定姿;星图匹配;新型Top-hat变换
0 引 言
星敏感器是以恒星为参考基准,测量相对于航天器的角位置,以此确定航天飞行器相对于惯性坐标系的三轴姿态信息的一种高精度、高可靠性装置[1]。其工作原理是对传感器(CCD或CMOS)在视场范围内获得图像数据进行一系列处理,提取出星点位置,然后通过星图匹配获取导航星编号,进而通过导航星在像空间和天球坐标系下的坐标计算得到星敏感器视轴姿态,最终获得星敏载体的姿态信息。
到目前为止,星点的提取定位和匹配识别以及定姿都已做了大量的研究。其中星图匹配已经发展了很多的匹配算法,本文将综合研究三角形匹配算法和采用P向量的匹配算法,对比其匹配效率和成功率,分析相关算法的优缺点。
1 星点提取
CCD(或CMOS)星敏感器在获取星图时,其光学系统通常都进行了适当的散焦,使星点大多数能量都集中分布在3×3像素~5×5像素的区域内。其亮度分布符合点扩散函数,并且光斑在3×3像素内的中心像素内所集中的能量达到40%以上,能量所占比例达到98%以上[2]。受到噪声以及积分时间等因素的影响,实际星点的构像为近似圆形或者椭圆形。为了保持星点的这种形状特性,可以选择合适的形态学运算进行处理,同时还具有消除噪声的优点[3]。
传统的星点提取大都通过设置一个阈值,将星点与背景进行分离。白相志、周付根等人在监测红外小目标时提出了一类新的Top-hat变换,这种变换具有经典变换所不具有的独特优势:充分利用了目标区域与其周围区域之间的差异,提高了Top-hat变换的目标检测能力,同时也降低了噪声及复杂背景对其性能的影响[4]。本文将其应用到星点提取当中,成功完成了星点提取。新型Top-hat变换对应的形态学开运算和闭运算定义如下:
(f∘Boi)(x)=[(fΘΔB)⨁Bb](x) ,
(1)
(f·Boi)(x)=[(f⨁ΔB)ΘBb](x),
(2)
式中:Bi和Bo为两个形状相同的扁平结构元素;ΔB=Bo-Bi是Bo和Bi之间的环状边缘区域,ΔB的直径与Bo相同,Bb是直径介于Bi和Bo之间的与Bi和Bo形状相同的扁平结构元素[4]。
新型Top-hat变换定义为
NWTH(x,y)=f(x,y)-(f·Boi)(x,y) ,
(3)
NBTH(x,y)=(f∘Boi)(x,y)-f(x,y) .
(4)
新型Top-hat变换与经典Top-hat变换有所不同,它改变了膨胀和腐蚀的先后顺序,采用两个不同结构元素之间的关联,利用结构元素的边缘区域ΔB体现目标区域和其周围边缘区域的不同。
为了保证新型Top-hat变换的结果中不出现负值,NWTH和NBTH重写为
NWTH(x,y)=max(f(x,y)-
(f·Boi)(x,y),0) ,
(5)
NBTH(x,y)=max((f∘Boi)(x,y)-
f(x,y),0) .
(6)
提取之后需要进行连通域检测和星点定位,连通域标记算法主要有[5]:区域生长法、像素标记法、行程标记法和基于线扫描的连通域搜索算法。玉磊、郑勇等人[6]更是在研究了不同形式质心法以后提出了灰度质心法的统一模型,本文采用带阈值的加权平方质心定位算法。采用基于线扫描的连通域检测算法。星点提取定位结果如图1所示,原始星图提取的星点其中的一颗星。
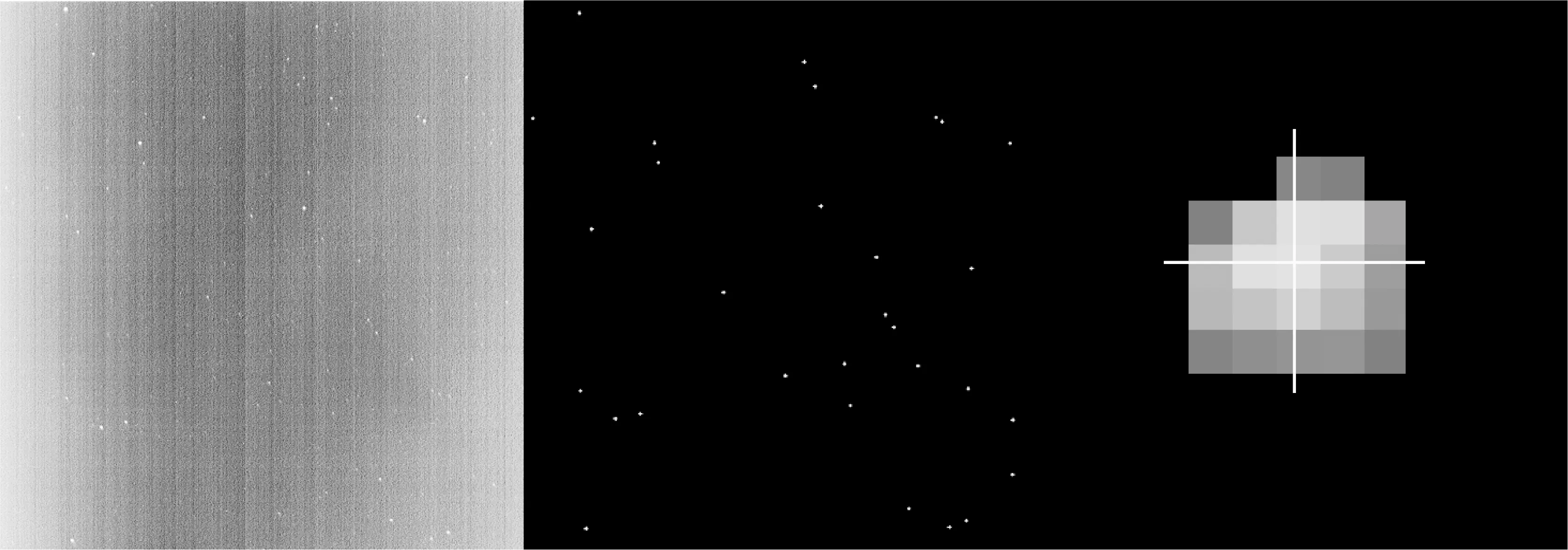
图1 星点提取结果
2 星图匹配
2.1三角形匹配
三角形匹配方法是目前发展最成熟的星图匹配方法,它的核心思路是:角距在一定范围内的三颗星组成一个三角形,用它们之间的角距作为该三角形的边长;然后计算星图上星的角距,用角距去匹配,如果一个三角形的边与该三角形的对应相等(相近)则匹配成功。角距在导航星表中的存储格式如表1所示。
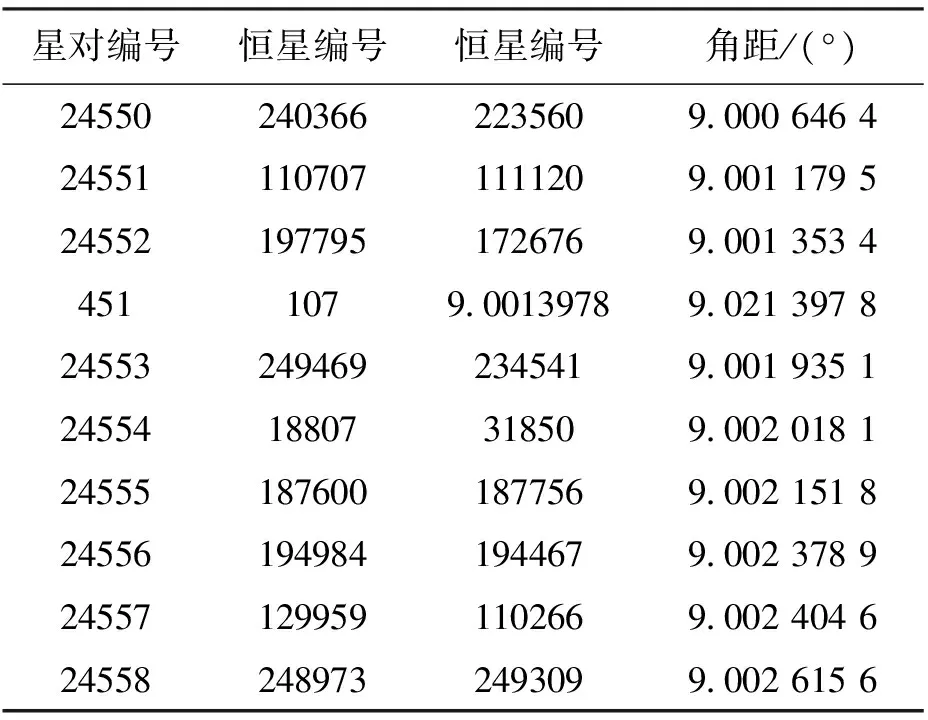
表1 三角形角距导航星表
为了便于快速匹配,要对星对按照角距进行分区。表中第4行记录即为一条分区记录,其含义是:在第451个区间中有107条星对记录,角距范围分布在9.0013978~9.0213978.
三角形匹配算法描述:
1) 选取一定数量的星(比如说最亮的20颗),以三颗为一组(构成三角形),计算两两之间的角距。
2) 在导航星表中查找三角形(s1,s2,s3)三条边分别所属的角距区间,记为CdS1S2、CdS1S3、CdS2S3.
3) 如果导航星表中存在三角形与之匹配,则存在S1′,S2′,S′,满足(S1′,S2′)∈CdS1S2(S1′,S3′)∈CdS1S3(S2′,S3′)∈CdS2S3.
4) 输出匹配结果。
匹配结果如表2所示。
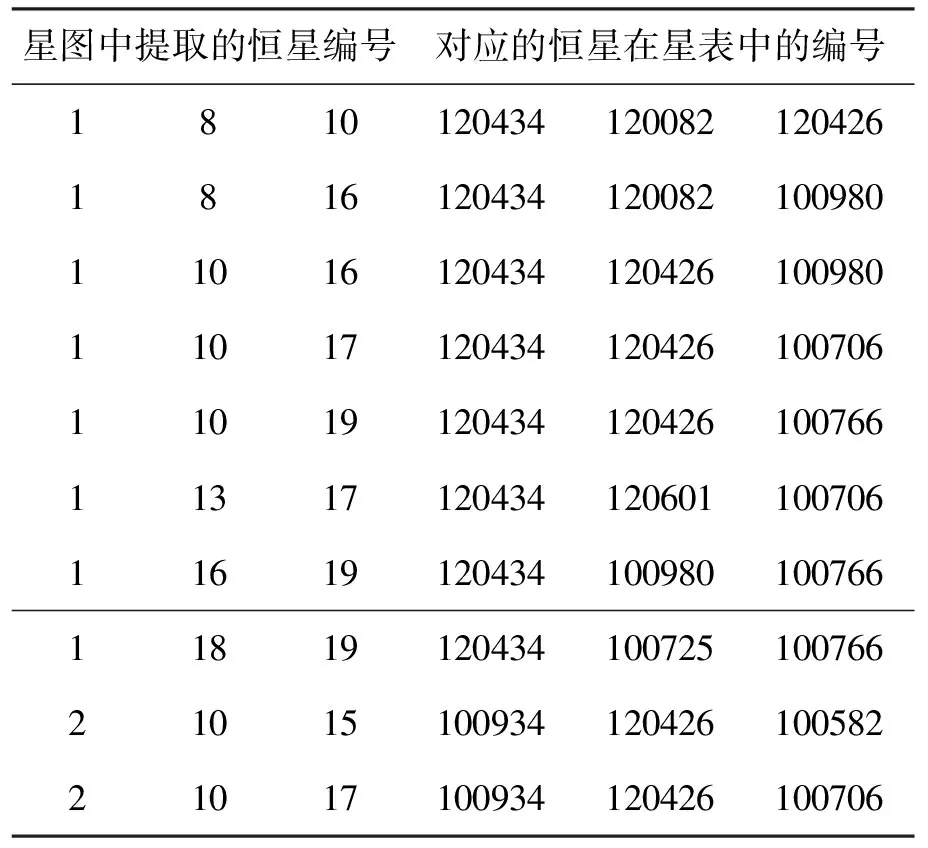
表2 星图匹配结果(部分)
一颗星会在不同的三角形中得到匹配,当出现错误匹配时可以通过一颗星在不同的三角形中匹配的结果进行相互验证。可以有效的剔除错误匹配,提高匹配的准确率。
2.2采用P向量的匹配算法
基于P向量的星图匹配方法,核心思路是:以每颗星为主星构建一个属于它的特征(角距)三角形,然后把所有导航星的特征三角形投影到一条直线上,要求彼此之间差异最大化,这样每个三角形就可以用直线上的一个点(P值)来表示。匹配时直接匹配P值,就可以完成三角形的匹配。基于P值的导航星表如表3所示。
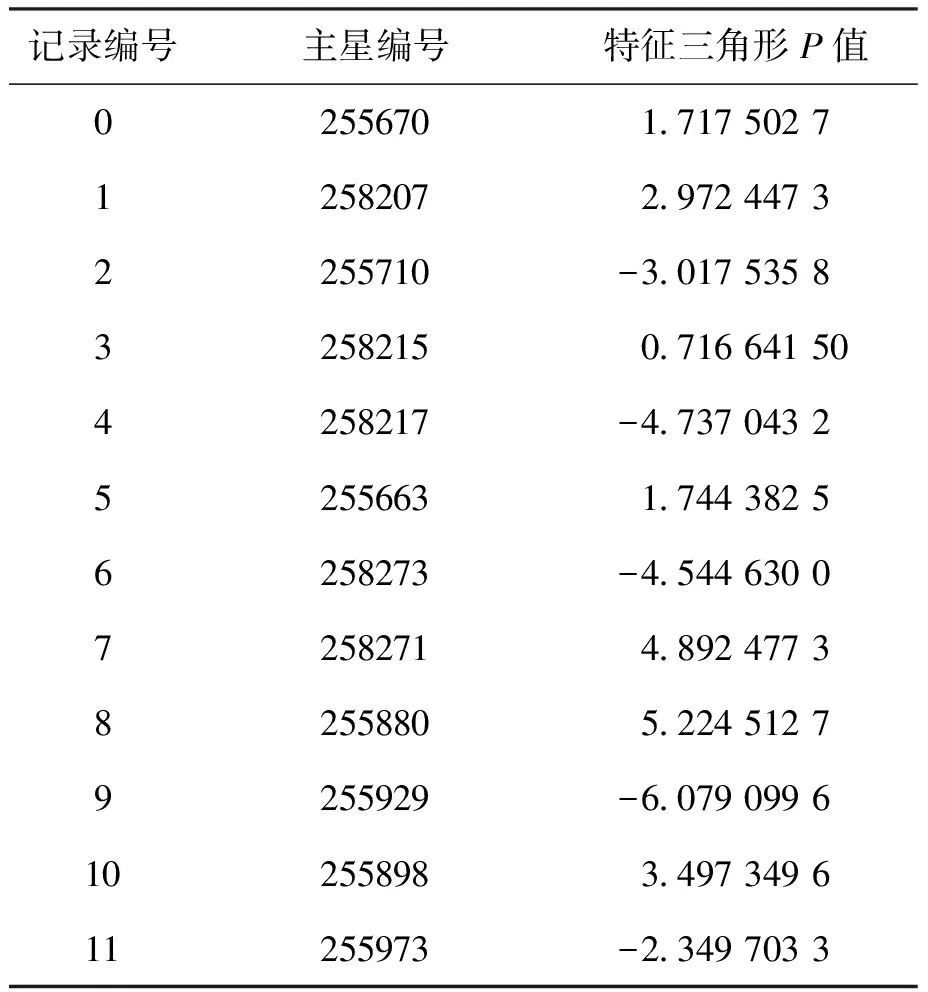
表3 P值导航星
其中,第一列是记录编号,第二列是主星在导航星表中的编号,第三列特征三角形的P值。P值导航星的最佳投影轴方向为(-0.406 042 93,-0.575 496 07,-0.709 882 68),基于P值的匹配算法描述如下:
1) 构建特征三角形。以每一刻导航星为主星,计算其与最邻近星和次临近星,以及最临近星和次临近星的角距。判断短边到长边的偏转顺序,若为顺时针则角距均为正,若为逆时针则角距均为负,构成特征三角形库。
2) 求解最佳投影轴。假设共有N个特征三角形,那么对应有N个三维向量。设投影直线的方向为Ω=(ω1,ω2,ω3)T,某三维向量为Xi=(xi,yi,zi)T,则投影点坐标为
Pi=ω1xi+ω2yi+ω3zi=ΩTXi.
(7)
那么,所有投影点的均值和标准偏差分别为
(8)
(9)

(10)
定义Lagrange函数:
L(Ω,λ)=ΩTZΩ-λ(ΩTΩ-1).
(11)
λ和Ω为对称矩阵Z的特征值和特征向量,那么目标函数max(ΩTZΩ)等价为
max(ΩTZΩ) =max(ΩTλΩ)
=max(λΩTΩ)
=max(λ) .
(12)
从式(12)可以看出,目标函数max(ΩTZΩ)的最大值就是对称矩阵Z的最大特征值,此时最优投影主轴就是矩阵Z最大特征值对应的特征向量,也就是数据点从三位空间到一维空间的最佳投影方向。
3) 求解P值。
P=ΩTX.
(13)
4)P值匹配。计算的P值与P值表中的P值最接近那个如果小于限差,则匹配成功。匹配结果如表4所示。
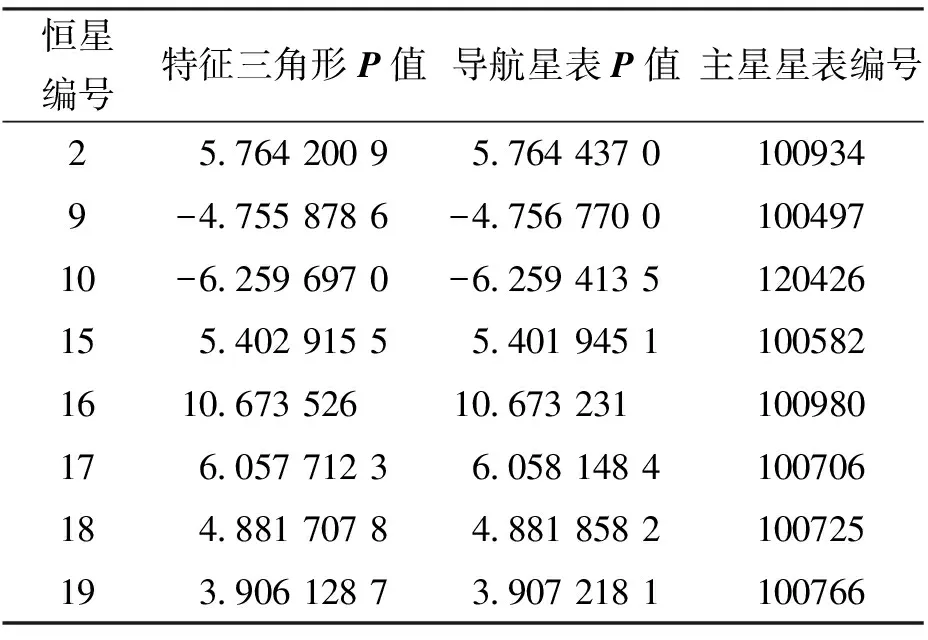
表4 基于P向量的匹配结果
第一列为恒星在星图上的编号,第二列为星图提取星特征三角形的P值,第三列为对应的P值导航星表中的P值,第四列为主星在导航星表中的编号。
2.3对比分析
对多幅图像进行星点提取,然后每幅图像选取最亮的20颗星进行匹配试验,图2 为它们的匹配速度的对比图。
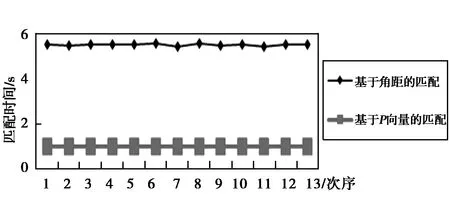
图2 匹配识别速度对比图
从图2中可以看出,基于P值向量的匹配方法,速度远远快于基于角距的三角形匹配算法。对20颗星进行匹配,三角形匹配耗时均值为5.512 4 s,而基于P值得到匹配耗时均值为1.000 8 s.
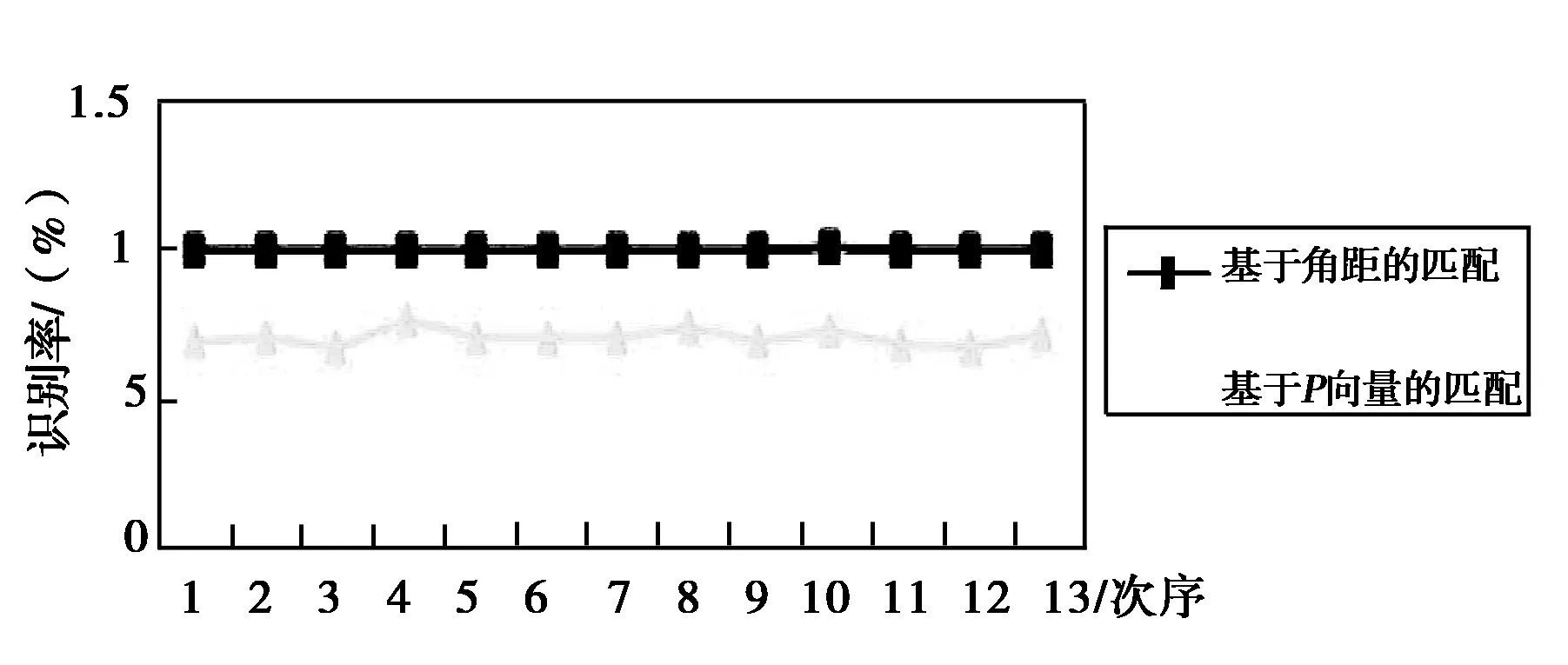
图3 识别率对比图
从图3可以看出,三角形匹配的识别率又远高于基于P值得识别率,三角形匹配识别率均值在99.18%,而基于P值得识别率均值仅在69.80%.另外通过实验发现,基于P值得匹配误匹配率也要远远高于三角形匹配。
3 结束语
本文通过实验对比了三角形匹配和基于P值得匹配算法,主要分析了它们的匹配速度和识别率。发现基于三角形的匹配在识别率上有明显优势,但是其匹配速度却远远低于基于P值得匹配。同时基于P值得匹配方法,识别率又太低,不能满足当前卫星定姿对识别率的要求。通过实验可以得出,如果星图不追求快速甚至实时匹配处理,则应该选取识别率稳定且非常高的三角形匹配。反之则应该考虑对基于P值得匹配方法进行改进,提高其识别率。
[1] 刘朝山,刘光斌,王新国,等.弹载星敏感器原理及系统应用[M].北京:国防工业出版社,2010.
[2] 张广军.星图识别[M].北京:国防工业出版社,2011.8.
[3] 张福刚. 基于星相机的高精度卫星姿态计算[D].青岛:山东科技大学, 2015.
[4] 白相志,周付根,解永春,等.新型Top-hat变换及其在红外小目标监测中的应用[J].数据采集与处理,2009,24(5):643-649.
[5] 马吉甫,高雪峰.基于线扫描的连通域搜索算法[J],福建电脑,2006(12):121-122.
[6] 贾辉.高精度星敏感器星点提取与星图识别研究[D].湖南:国防科技大学,2010.
ComparisonandAnalysisofStarImageMatchingMethodBasedonStarSensor
KONGLingshu1,CHENMeng1,ZHANGFugang2
(1.ShangdongUniversityofScienceandTechnology,CollegeofGeomics,Qingdao266590,China; 2.BeijingWatertekFu-HisBigDataTechnologyCo.,Ltd,Beijing100094,China)
With the improvement of attitude measurement accuracy requirement of Surveying and mapping satellite and deep space exploration satellite, it is one of the important issues to further improve the accuracy of star map matching. Star extraction and positioning is a prerequisite for star pattern recognition. This paper briefly discusses the new top hat transformation method of star extraction. By comparing the experimental analysis of the triangle star pattern matching algorithm and the vector P star map matching algorithm advantages and disadvantages.
Attitude measurement; star pattern matching; new top-hat transform
10.13442/j.gnss.1008-9268.2017.05.003
P228.4
A
1008-9268(2017)05-0016-05
2017-07-07
联系人: 孔令淑 E-mail: lingshukong@126.com
孔令淑(1992-),女,硕士研究生,主要研究方向为卫星定位与导航技术。
陈梦(1994-),男,硕士研究生,主要研究方向为工程测量。
张福刚(1994-),男,硕士研究生,主要研究方向为卫星定位与导航技术。
猜你喜欢
军事文摘(2022年12期)2022-07-13
飞控与探测(2020年3期)2020-07-16
空间控制技术与应用(2020年6期)2020-04-28
综艺报(2019年15期)2019-08-16
现代装饰(2019年7期)2019-07-25
北京航空航天大学学报(2019年4期)2019-05-05
兵工学报(2018年7期)2018-08-07
中国高新技术企业(2017年5期)2017-05-05
软件(2016年6期)2017-02-06
物联网技术(2016年11期)2017-01-12
