
一种基于软相关的GNSS比特同步方法
2017-11-24 07:06张剑邵晨光李满庆
全球定位系统 2017年5期
张剑,邵晨光,李满庆
(中国兵器工业导航与控制技术研究所,北京 100089)
一种基于软相关的GNSS比特同步方法
张剑,邵晨光,李满庆
(中国兵器工业导航与控制技术研究所,北京 100089)
GNSS接收机中因为比特同步错误而导致的导航电文提取失败和伪距计算错误等问题非常普遍。目前的比特同步算法主要是直方图法。其中,基于硬判决的直方图法应用较为广泛,主要是因为其实现方便,但在低载噪比下同步成功率太低,无法满足工程需求。因此,需要对低信噪比下的bit同步算法进行研究。本方案提出了直方图法与软相关结合的bit同步算法。首先,模拟产生在不同载噪比下的GNSS信号数据,它有20个比特边界。然后,采用两种算法进行比特同步。重复仿真多次,每次仿真采用随机的比特边界,得到每种算法在不同载噪比下的正确比特同步概率。分析仿真结果发现,比特同步的时间越长,各算法的正确概率越大。在低载噪比下,软相关方法远高于传统的直方图法。最后基于altera arriaV芯片完成了软相关的比特同步方案工程实现。
比特同步;软相关;低信噪比;正确概率
0 引 言
在GNSS接收机中,获取导航电文是一项重要的工作。对于GPS的L1频点的C码信号上调制的数据码而言,PN码的周期为1 ms,导航电文的速率为50 bps,即1 bit的导航电文占用20个周期的pn码[1,2]。接收机通过捕获可以实现1ms周期内的pn码同步,但是无法确定每一比特导航电文的起始位置,或者称为比特边界。而寻找比特边界的工作就称为比特同步[3]。比特同步在整个卫星导航接收机中扮演着非常重要的角色,它是卫星信号稳定跟踪之后的后续处理中最基础的一步。一方面,高灵敏度是导航接收机的一种发展趋势,它往往会采用长时间的相干积分,这时,错误的比特同步可能导致相干积分值不增反减,从而降低灵敏度[4]。另一方面,提取导航电文时,错误的比特同步会使比特判决的错误概率增加。最重要的一点,比特同步直接影响帧同步,进而影响伪距的计算,比特同步每错开1 ms,会导致300 km的伪距偏差。直方图法是一种常用的比特同步算法[5],它只利用相关器输出的符号信息进行统计判决,实现简单,计算量小,但其在低信噪比下的同步错误概率较大。通过软相关优化的直方图法采用了每1 ms信号的能量信息,通过统计结果来获取正确的bit边界,运算量相对来说较大,但在低信噪比下的正确同步概率得到了极大的提高。
1 算法理论分析
以GPS L1频点卫星信号为例进行说明,设定接收机相关积分时间为1 ms,且信号处于稳定跟踪状态。
1.1直方图法
先假定不存在噪声。以1 ms周期的pn码为单位来考虑,在1 bit的导航电文内,相关值是不会有跳变的。对于L1频点bit信号,每20 ms周期为1个bit信号。直方图法就是利用卫星信号的这种特性来进行比特同步的。在实际中,由于存在噪声,会有一定概率出现错误判决,因此还需要进行多次判决获得统计结果。GPS卫星bit同步算法过程如下:
1) 选取长度为N×20 ms的信号;
2) 相关器连续输出1 ms的相关值,Sign-i为其符号,i=0,1,2,…,N×20-1;
3) 定义20个候选边界计数器Kδ,δ=i mod 20;
4) 对于GPS信号,边界计数器在任意一点满足码周期的时候即增加一计数,在达到选取长度后,将20个周期内出现判决符合最多次数的位置作为bit翻转位置,即bit同步点。
1.2软相关结合的直方图法
对于普通硬判决下的bit同步结果,在信噪比较低的情况下,会出现1 ms相关积分的符号不正确的情况,而直方图法获取一次正确的bit同步结果,必须要求连续20 ms的相关积分符号均为正确值,这样会极大地降低正确判决的可能性,因此,采用软相关结果的判决能够有效避免少数数据错误带来的判决偏差。
1) 选取长度为N×20 ms的信号;
2) 相关器连续输出1 ms的相关值,采用16 bit有符号数据记录;
3) 定义20个候选边界计数器Kδ,δ=i mod 20;
4) 对于GPS信号,将其以20 ms为周期进行连续相关累加,每获得1 ms数据进行一次相关,每20 ms内,记录最大相关结果作为码同步相关结果,连续判决到选取信号长度后将最大结果次数最多的位置作为码同步结果。
软相关结合的直方图法能够有效地解决低信噪比下bit同步无法同步的问题,在出现较大程度的1 ms积分符号错误的时候也能够正确的获取bit翻转的正确位置。
2 仿真分析
仿真中出,采用低信噪比下的正常跟踪信号进行bit同步仿真,将硬判决的bit同步结果与软判决的 bit同步结果进行对比。首先选取了长度为1 000 ms的信号数据,将信号相关值选取为符号和16 bit数据两种方式,以20 ms为周期进行硬判决和软判决,硬判决中,每次符合相关结果的数据起点作为一次bit同步结果;软相关中,将一个20 ms周期内的最大值位置作为bit同步结果。在1 000 ms内进行统计,生成直方图。
2.1硬判决直方图
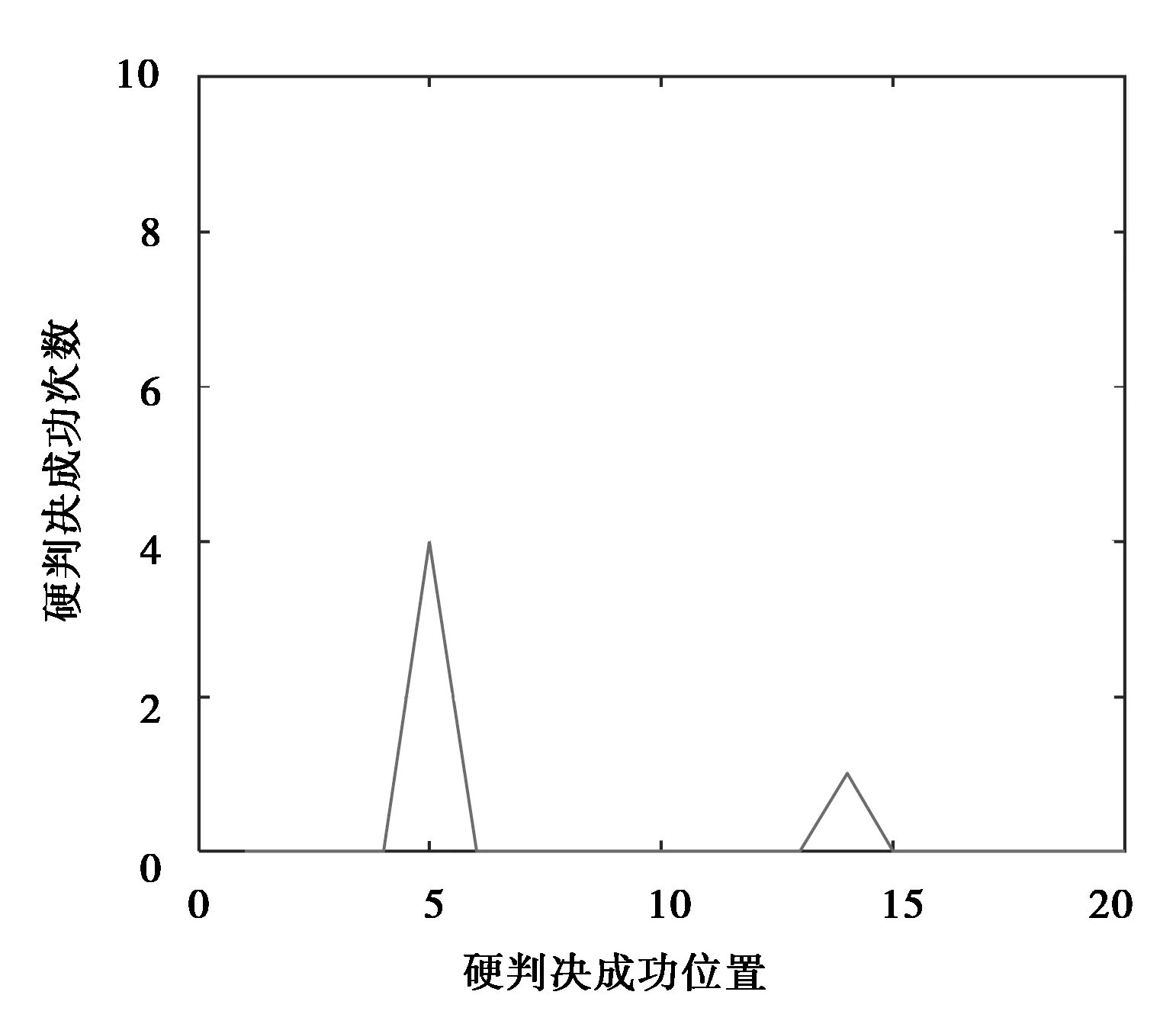
图1 -144 dBm下的硬同步结果
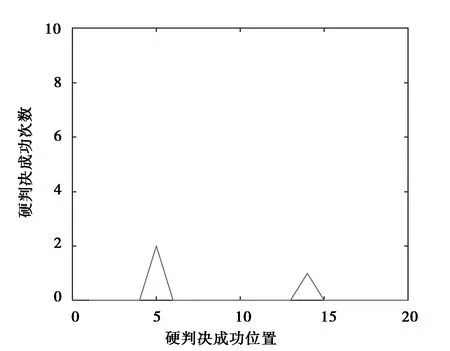
图2 -147 dBm下的硬同步结果
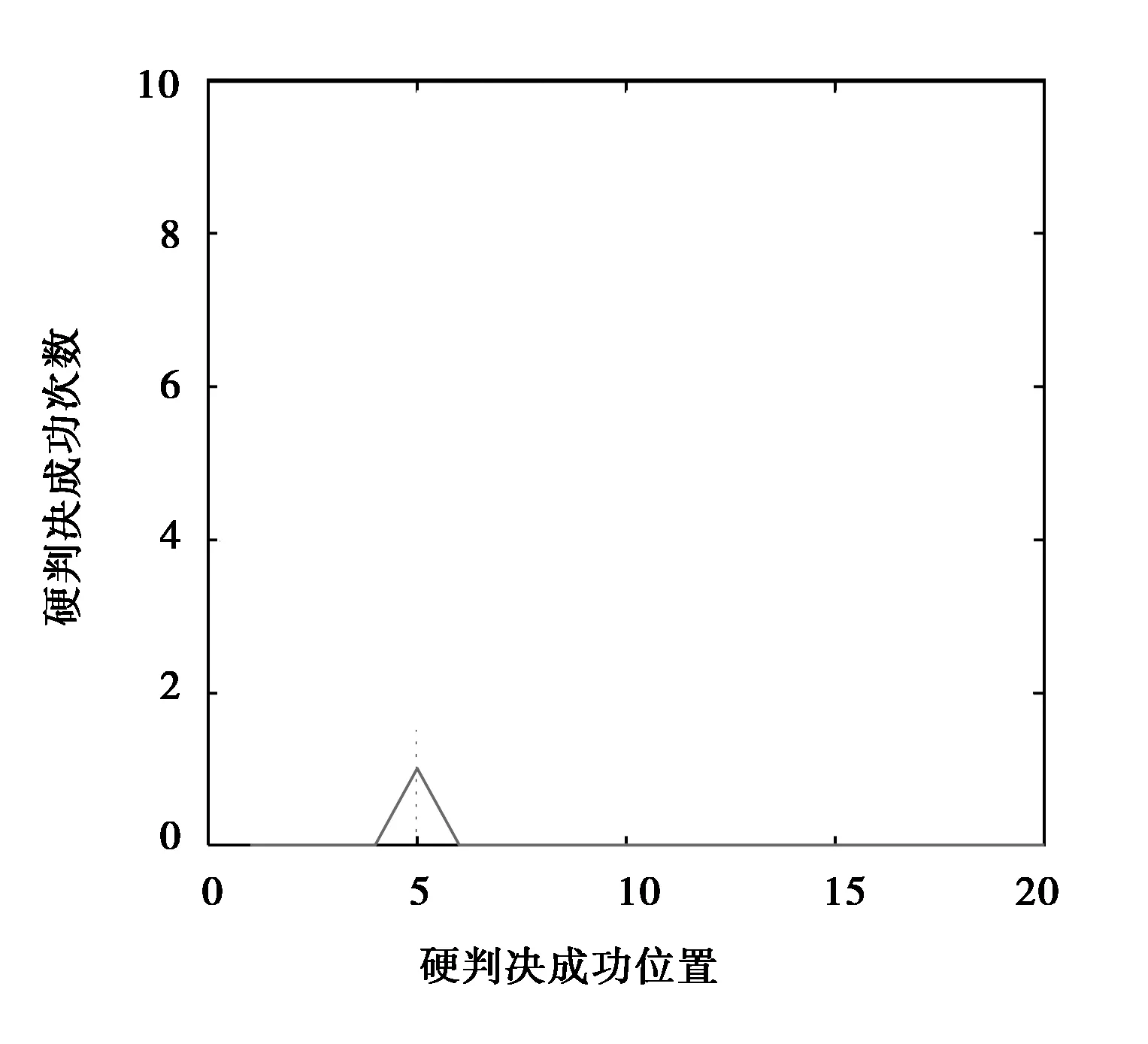
图3 -149 dBm下的硬同步结果

图4 -151 dBm下的硬同步结果
图1中,硬判决成功次数为5次,分别在5和14的位置,图2中硬判决成功3此,也在5和14的位置,而图3和图4均判决成功小于2次。通过仿真结果可以看出,载噪比低于-144 dBm的情况下,硬判决很难通过直方图的方式得到正确的bit同步结果,这是因为在低信噪比下,1 ms相干积分的误码率极高,很难找到连续20 ms的无误码的信号结果,如果采用硬判决的直方图法,那么最多能够达到的bit同步下限不超过-144 dBm.
2.2软相关结合的直方图法
采用硬判决的方式在低信噪比下有很大的性能缺陷,而采用软相关判决能够利用软信息提高同步成功率,改善同步结果。
如图5~图8所示,软相关的结果可以看出,在-144 dBm的时候,软相关结果最大值作为判决条件能够相当明显的给出正确的bit同步位置,而且能够在统计结果中显示出比硬判决更大的峰值,而采用软相关的结果能够实现不低于-151 dBm条件下的bit同步,并获取正确的bit同步结果。
综合分析,加入软相关的bit同步一定程度上提高了bit同步算法的复杂度,但是在增加一定程度的加减法运算的程度下,能够提升7dB以上的性能。

图5 -144 dBm下的软相关同步结果
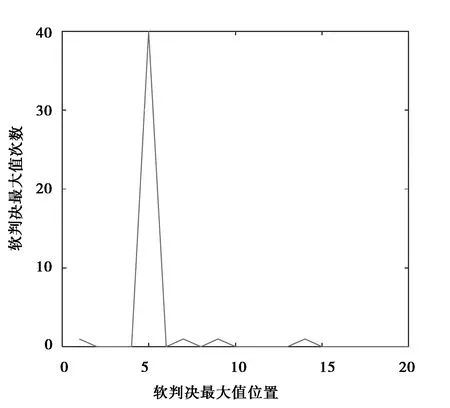
图6 -146 dBm下的软相关同步结果

图7 -149 dBm下的软相关同步结果
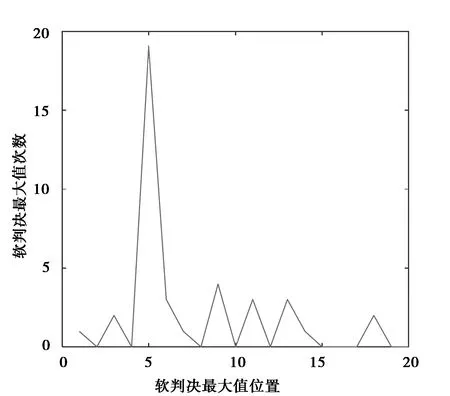
图8 -151 dBm下的软相关同步结果
3 硬件实现
基于软相关的bit同步能够有效提升GNSS接收机同步性能,采用altera arriaV SOC芯片进行硬件实现,采用芯片中FPGA部分进行基带相干积分,将相干积分结果送入ARM端进行同步位置判决,这种方式能够充分发挥FPGA端并行处理优势。图9示出了本方案硬件实现的接收机样机。
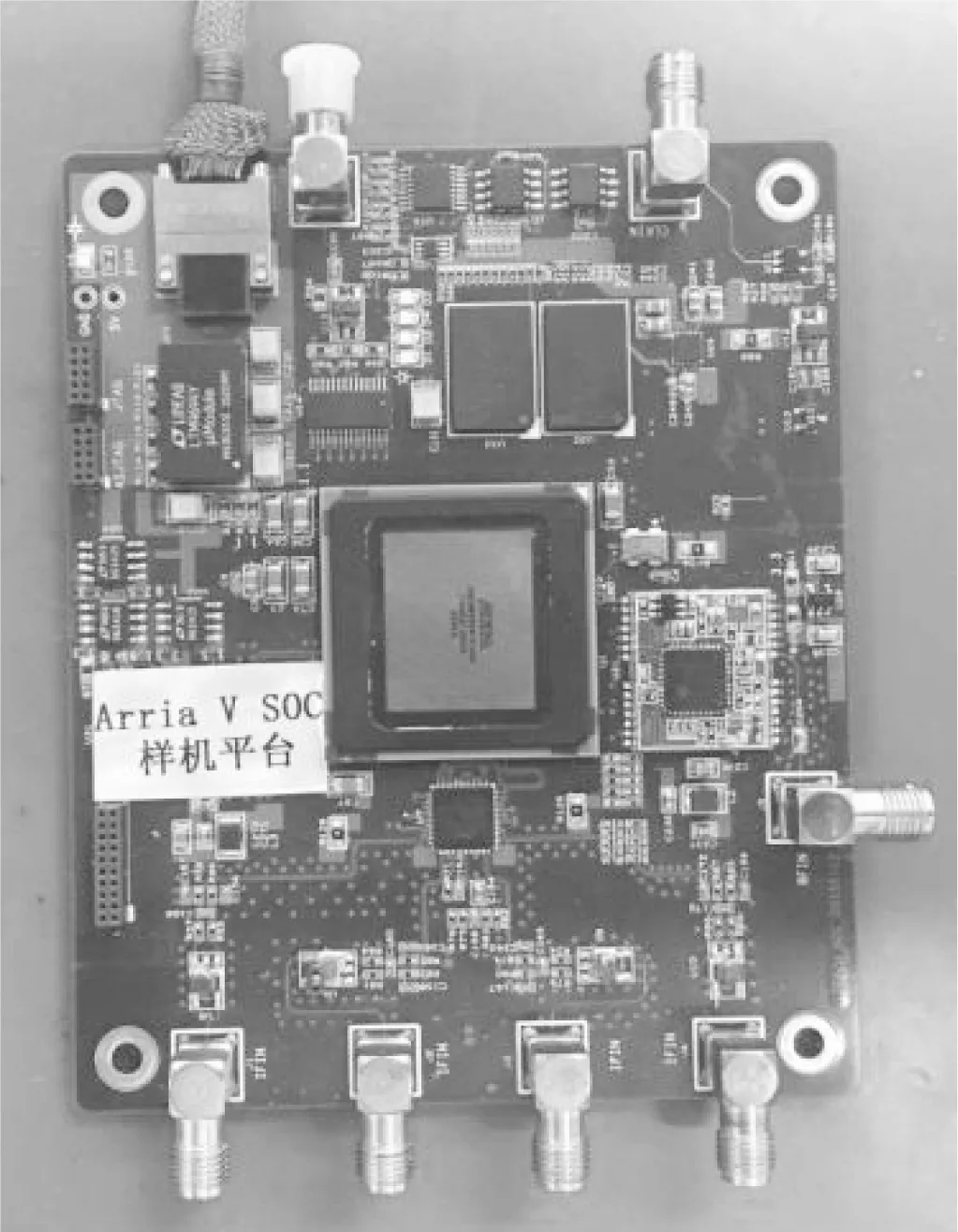
图9 GNSS接收机样机
软相关主要在ARM端进行处理,处理流程如下:
1) 接收FPGA端传输的1 ms积分值,并将传输的首个积分值设为计数起点;
2) 以20个计数值为周期,即20 ms为周期,进行累加积分,计算累加绝对值;
3) 统计20个计数周期内累加绝对值的最大值,并记录最大值位置(最大值位置为1~20中某个值);
4) 统计50个周期的最大值位置出现次数,如某位置值出现次数大于设定阈值,则将其选为比特同步正确位置。
以上便是GPS 软相关下的bit同步实现方案,值得注意的是,在实际信号中,每个bit边界并不一定会出现翻转,因此在GPS电文一段时间无翻转时,无论传统直方图法还是软相关直方图法都无法获得bit同步正确位置,需要等待出现翻转电文后才能得到正确结果。
4 结束语
本文从理论上分析了传统直方图法和加入软判决的直方图法的算法流程与实现方案,在选取了多个低信噪比的实际信号进行仿真分析,表明软判决直方图对硬判决直方图方案的性能提升不小于7 dB;同时,采用SOC芯片实现了软相关的bit同步,并给出了ARM分布实现软相关的软件处理流程,该方案已应用于多款接收机平台。
[1] KOKKONEN M, S PIETILA. Anew Bit synchoronization method of a GPS receiver [C]//Proceedings. IEEE Positioning, Location, and Navigation Symposium (PLANS), Palm Springs, CA, USA, (0-7803-7251-4), April 2002. USA: IEEE,2002.
[2] 谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2012.
[3] 许峰一种基于相位差分的GPS比特同步方法[J].浙江大学学报(工学版),2007,41(12):2031-2035.
[4] ARINC Research Corporation.ICD-GPS-200C Navstar GPS space segment navigation user interfaces [S].1993.
[5] KAPLAND E D,HEGARTY C J.Understanding GPS principles and applications[M].寇艳红,译.北京:电子工业出版社,2007.
ASoft-relatedGNSSBitSynchronizationMethod
ZHNAGJian,SHAOChenguang,LIManqing
(NavigationandControlTechnologyInstituteofChinaNorthIndustriesGroupCorporation,Beijing100089,China)
In the GNSS receiver, it is very common to extract the navigation message caused by bit synchronization errors, such as the failure of the navigation message and the error of the pseudo range. The current bit synchronization algorithm is mainly based on the histogram method. Among them, the histogram method based on hard decision is widely used, mainly because of its convenient implementation, but its low noise ratio is too low, can not meet the needs of the project. Therefore, it is necessary to study the bit synchronization algorithm under low SNR, this scheme adopts the bit synchronization algorithm with the combination of histogram method and software. First, the GNSS signal data is generated at different carrier to noise ratio, and it has 20 bit boundaries. Then, two algorithms are used to carry out bit synchronization. Repeated simulation times, each time the simulation using random bit boundary, get the correct bit synchronization probability of each algorithm in different carrier to noise ratio. The simulation results show that the longer the bit synchronization time is, the greater the probability of the algorithm is. In the low carrier to noise ratio, the soft correlation method is much higher than the traditional histogram method. Then the soft correlation method was implement in altera arriaV.
Bit synchronization; soft correlation; low signal to noise ratio; correct probability
10.13442/j.gnss.1008-9268.2017.05.013
P228.4
A
1008-9268(2017)05-0063-05
2017-07-31
联系人: 张剑E-mail:gps_zhang@sina.com
张剑(1969-),男,硕士,研究员,主要从事卫星导航技术研究。
邵晨光(1985-),男,硕士,工程师,主要从事卫星导航技术研究。
李满庆(1987-),男,硕士,工程师,主要从事卫星导航技术研究。
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
导航定位学报(2022年1期)2022-02-17
中国金属通报(2021年9期)2021-08-06
安徽电子信息职业技术学院学报(2020年5期)2020-11-13
中国外汇(2020年7期)2020-07-10
电子制作(2019年24期)2019-02-23
摄影之友(影像视觉)(2018年12期)2019-01-28
电子制作(2018年19期)2018-11-14
初中生世界·八年级(2017年3期)2017-03-24
电子制作(2016年1期)2016-11-07
