
基于RTCA标准的WAAS和EGNOS广播星历差分完好性服务性能研究
2017-11-24 07:06孟鑫曹月玲楼立志毛鹏宇
全球定位系统 2017年5期
孟鑫,曹月玲,楼立志,毛鹏宇
(1.同济大学 测绘与地理信息学院,上海 200092;2.中国科学院上海天文台,上海 200030)
基于RTCA标准的WAAS和EGNOS广播星历差分完好性服务性能研究
孟鑫1,2,曹月玲2,楼立志1,毛鹏宇1
(1.同济大学 测绘与地理信息学院,上海 200092;2.中国科学院上海天文台,上海 200030)
为了提高GPS卫星导航系统服务性能,很多国家和地区建立了独立的星基增强系统(SBAS),通过提供广播星历差分与完好性增强信息,满足高精度高完好性用户使用需求。本文介绍了美国WAAS和欧洲EGNOS等星基增强系统的广播星历差分完好性信息电文编码格式,并对实际星基增强系统的广播星历差分与完好性电文进行解析。由于不同的星基增强系统采用的信息处理模式不同,针对WAAS和EGNOS两个不同地区建立的星基增强系统,对广播星历差分慢变改正/快变改正的变化特征进行了比较分析。研究了星基增强系统广播星历差分完好性信息用户使用算法,基于国际GNSS服务组织(IGS)提供的GPS实测数据,对WAAS系统和EGNOS系统的广播星历差分服务精度和完好性性能进行了对比分析。结果表明,WAAS系统的伪距单点定位精度约为1.2 m, EGNOS系统的伪距单点定位精度约为1.8 m,与GPS基本导航服务相比,伪距单点定位精度可提高约22%和16%。两个星基增强系统利用完好性电文计算的完好性保护限值大致相当,均在16 m以内,能够对定位误差进行包络。
WAAS;EGNOS;差分;完好性
0 引 言
随着民用航空对GNSS卫星导航系统应用要求的不断提升,很多国家和地区建立了星基增强系统(SBAS),它们独立于GNSS运控系统,由不同机构运营和维持。如美国的广域增强系统(WAAS),欧洲的地球静止导航重叠系统(EGNOS),日本的多功能星基增强系统(MSAS),印度的GPS辅助静地轨道增强导航系统(GAGAN),以及俄罗斯的差分校正和监测系统(SDCM)等[1]。其中WAAS和EGNOS是SBAS系统中建设较为成熟的系统。WAAS系统是由美国联邦航空局(FAA)开发建立的一个主要用于航空领域的导航增强系统,由3个主站、38个参考站、1个上行注入站和3颗地球同步静止卫星组成,主要针对GPS系统提供差分与完好性服务[2]。EGNOS系统是欧洲自主开发建设的星基导航增强系统,通过增强GPS和GLONASS卫星导航系统的定位精度,来满足高安全用户的需求[3]。
SBAS系统通过地球静止轨道(GEO)卫星搭载卫星导航增强信号转发器,向用户播发星历误差、卫星钟差、电离层延迟等多种差分与完好性等增强信息,以提高用户定位精度,保障服务的安全性[4]。增强信息需要按照一定的播发协议进行传输,美国航空无线电委员会(RTCA)制定的RTCA DO-229D标准[5],起初是为GPS和WAAS航空设备提供的最低运行性能标准,由于GPS在全球范围内的广泛使用,此标准也就被全世界普遍采用,具备了国际标准的性质,包括EGNOS和WAAS在内的SBAS系统都遵循此标准。RTCA DO-229D标准规定了SBAS系统地球同步卫星传输的信号规格、完好性信息及差分改正信息的传输格式[6]。
本文以广播星历和钟差慢变改正信息为例,介绍RTCA DO-229D标准差分完好性信息电文编码格式,以及电文解析方法。针对美国WAAS系统和欧洲EGNOS系统,解码并分析比较两个星基增强系统中广播星历差分与完好性信息变化特征。利用解析的WAAS和EGNOS广播星历差分完好性信息,基于IGS网GPS实测数据进行伪距单点定位处理,并与GPS基本导航定位服务精度进行对比,分析两个星基增强系统差分服务精度。基于完好性电文信息,通过计算用户定位保护门限,完好性风险概率,对两个增强系统的完好性服务性能也进行了比较分析。本文针对广播星历差分进行研究,暂不分析格网电离层信息。后文提到的差分信息均指广播星历差分改正信息。
1 SBAS电文格式及解码
1.1电文格式及参数说明
RTCA DO-229D标准中,定义了64种SBAS导航电文类型及格式,其中差分完好性信息通过Message Type 2-5(快变改正信息)、Message Type 25(慢变改正信息)等SBAS电文播发。以Message Type 25(慢变改正信息)为例,介绍SBAS电文编码格式。
Message Type 25为每一颗GPS卫星提供基于WGS-84 坐标系的慢变改正信息,包括卫星轨道改正值和钟差改正值。慢变改正信息的电文播发有两种速度模式(velocity=0、velocity=1),当velocity=0时,表示没有速度改正值,只有卫星轨道和钟差的常数改正值,且每条信息播发4颗卫星的慢变改正信息,其电文格式如图1所示。当velocity=1时,表示此信息中不仅有卫星的轨道和钟差的常数项改正,还有轨道速度改正和钟差漂移改正项,每条信息播发2颗卫星的慢变改正信息,其电文格式如图2所示[5]。

图2 Message Type 25的电文格式(velocity code=1)
EGNOS系统采用的是第一种速度模式,而WAAS系统采用的是第二种速度模式的电文来播发慢变改正信息。Message Type 25中各电文参数定义如表1所示。

表1 Message Type 25电文参数定义(Velocity Code=1)
1.2解码方法
EGNOS电文可以从EGNOS信息服务器(EGNOS Message Server)下载,服务器地址为ftp://ems.estec.eas.int/。下载的EGNOS电文每一个小时记录为一个ems文件,格式为卫星号、年、月、日、时、分、秒、电文类型及250比特的十六进制电文码。在解码时,根据不同电文类型,将其按照RTCA D0-229D标准中的电文格式逐条解码。在解码过程中,需注意的是,不能直接将十六进制的电文转换为二进制信息,要先转换为十进制,再将每位十进制数转为4位的二进制,然后再按照相应电文类型的电文格式,逐比特读取,并将其转换为十进制数,即可得到可用的电文信息。
WAAS电文可以从ftp://nstb.tc.faa.gov下载。下载的WAAS电文与EGNOS电文略有不同,WAAS电文是一天存储为一个文件,且需要通过使用EAS网站上的WAASCONV工具,将其转成十六进制,格式为天内秒、卫星号及250比特的十六进制电文码。与EGNOS电文不同的是,电文类型并没有直接给出,而是包含在250比特的信息中。
1.3慢变改正值和快变改正值的时间序列
解析WAAS系统和EGNOS系统的差分完好性电文信息,比较二者在相同时刻、对相同卫星变化特征。图3中示出了WAAS系统和EGNOS系统PRN1,PRN15,PRN28三颗卫星在2017年1月26日24小时中的快、慢变改正数变化特征,其中,深蓝色表示卫星X坐标改正值、红色表示卫星Y坐标改正值、绿色表示卫星Z坐标改正值、黑色表示钟差改正值、粉色表示UDREI、浅蓝色表示伪距改正值(PRC)。
经过对比,在卫星出入境时,WAAS系统的完好性信息(UDREI)是逐渐变化的,同时轨道和钟差的慢变改正数较大,当卫星入境后,UDREI稳定不再变化,改正数数值较小,变化平稳;而EGNOS的UDREI变化并不连续,会出现突然跳变的情况,无论是UDREI还是改正数都没有较明显的卫星出入境的变化。这可能与EGNOS系统在信息处理时选择的卫星截止高度角较大有关。
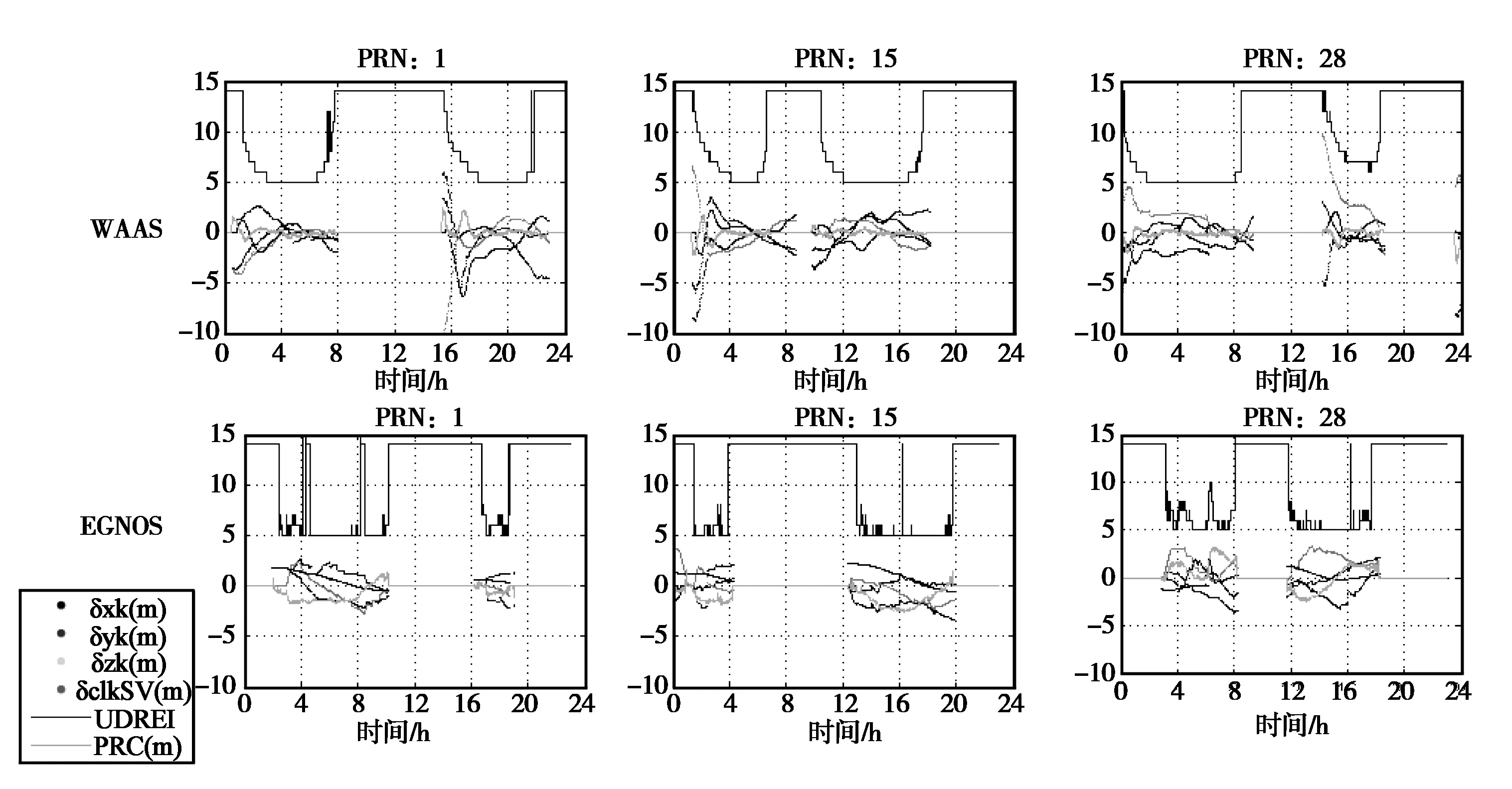
图3 WAAS系统和EGNOS系统差分完好性信息时间序列
2 数学模型
2.1伪距单点定位
drel+dmul+εp,
(1)
ρi=

(2)
采用高度角定权P:
(3)
(4)
式中,Elei为高度角。
为提高定位精度,采用双频组合,消除电离层误差;采用EGNOS模型及Neil映射函数,对对流层延迟进行改正[7];利用 Hatch 滤波进行伪距相位平滑[8],此外,还对地球自转及接收机天线相位中心等进行改正[9]。
2.2差分改正信息用户算法
2.2.1 快变改正值的应用
根据RTCA D0-229D标准,伪距变化率(RRC)并没有通过电文直接给出,而是需要通过伪距改正值(PRC)内插得到:
(5)
Δt=tof-tof,previous,
(6)
式中:PRCcurrent为当前电文伪距改正值,即PRC(tof);PRCprevious为前一电文的伪距改正值;tof为最近快变改正值的时间;tof,previous为PRCprevious对应的时间;
则改正后的伪距应为
PRCcorrection(t)=PRmeasured(t)+PRC(tof)+
RRC(tof)×(t-tof) ,
(7)
(8)
2.2.2 慢变改正值的应用
根据电文信息,卫星轨道改正值为:
(9)
卫星钟差改正值为
δΔtSV(t)=δaf0+δaf1(t-t0)+δafG0,
(10)

则改正后的卫星钟差应为
(11)
改正后的卫星坐标:
(12)
2.3完好性监测保护门限计算模型
完好性反映的是根据观测量解算出来的位置结果的可靠性,以PL(保护门限,以一定的置信概率限定的误差范围)表示,对定位误差具有包络作用,若定位误差超越PL,则认为是一个危险误导信息(HMI),对于SBAS系统,HMI的概率为10-7.如图4所示,当计算位置误差超过水平保护门限(HPL)或垂直保护门限(VPL)时,系统需在告警时间(TTA)内向用户发出告警,否则认为存在完好性风险[10]。HAL(VAL)为HPL(VPL)的极限值,HAL(VAL)是由某一特定的飞行阶段决定的,如CAT-1的VAL为10 m,若HPL(VPL)超过HAL(VAL),则认为此时系统不支持该阶段的完好性性能需求[11]。本文将通过计算HPL、VPL、HMI概率、完好性风险,分析WAAS系统和EGNOS系统的完好性性能。
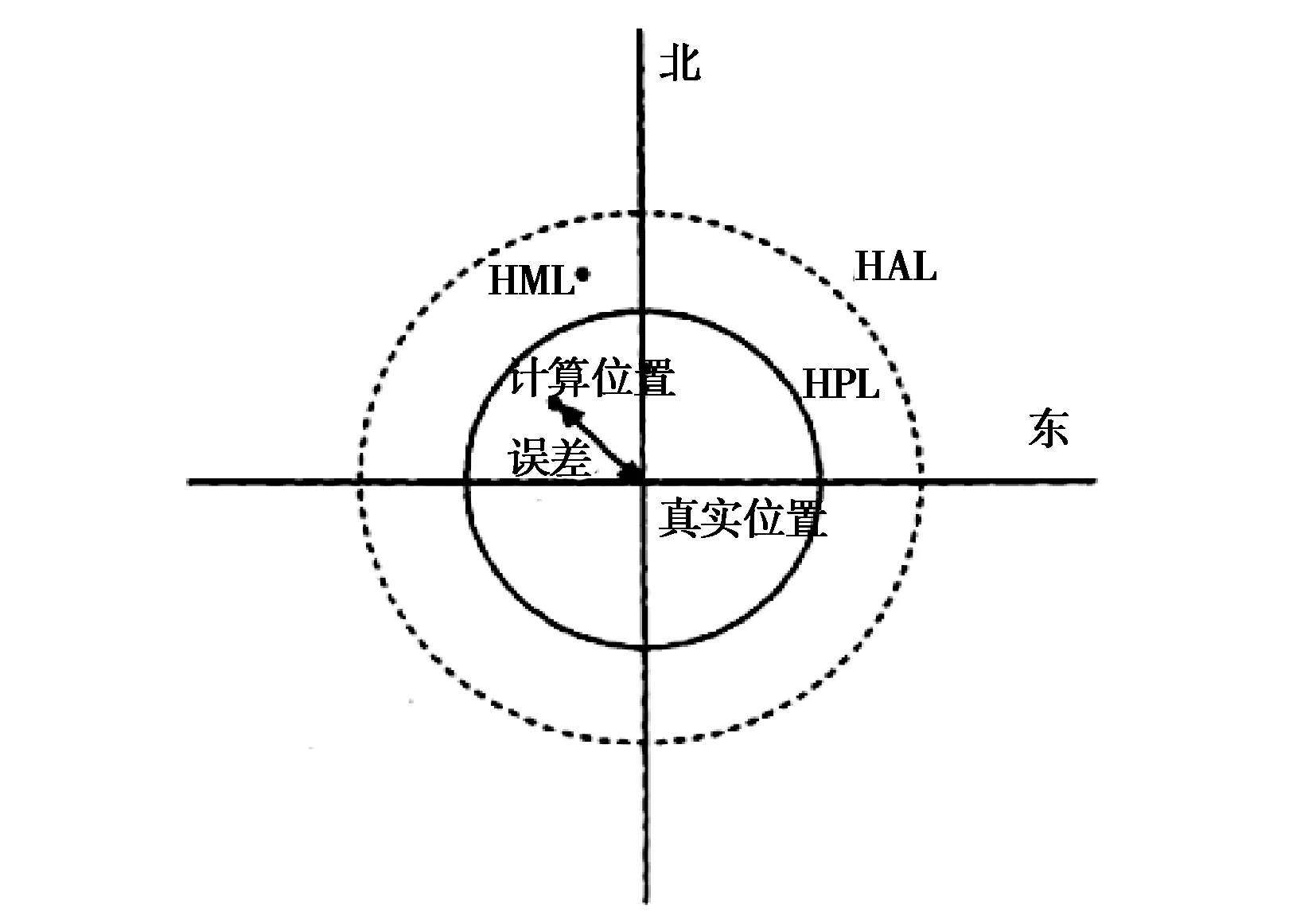
图4 完好性关系示意图
VPL=KV×dU
(13)
(14)
(15)
其中:dU为垂直误差的方差;dmajor为平面误差椭圆的长半轴
dmajor=
(16)

(17)
观测设计矩阵G第i行:
Gi=[-cos(ele(i))×sin(az(i))-
cos(ele(i))×cos(az(i))-
sin(ele(i)) 1],
(18)
(19)
(20)
(21)
(22)

(23)
(24)
(25)
σTVE=0.12 m .
(26)

3 数据计算分析及结果
为分析WAAS和EGNOS两个星基增强系统的差分服务精度,本文分别选择了EGNOS、WAAS覆盖范围内的多个IGS测站实测数据进行伪距单点定位计算,分别采用两种模式进行定位处理:1)只利用观测伪距和广播星历进行伪距单点定位、2)利用EGNOS/WAAS差分信息对伪距单点定位进行差分改正,比较两种模式的定位精度。
为比较WAAS和EGNOS两个星基增强系统的完好性服务性能,分别选择3个IGS测站5天数据,计算完好性保护门限,统计完好性风险概率,又从中选取1个IGS测站1天数据,分析保护门限与定位误差的包络情况。
3.1SBAS系统差分服务精度分析
WAAS系统和EGNOS系统的服务区域不同。利用美国境内widc站、whc1站、amc2站验证WAAS系统服务性能。利用欧洲境内hueg站、sofi站、gras站验证EGNOS系统服务性能。采用2017年1月22日至26日5天GPS观测数据,数据采用间隔为30s,进行伪距单点定位分析。GPS基本导航定位精度与两个SBAS增强系统的差分定位精度比较如表2和图5所示。
表2WAAS和EGNOS定位结果RMS统计表
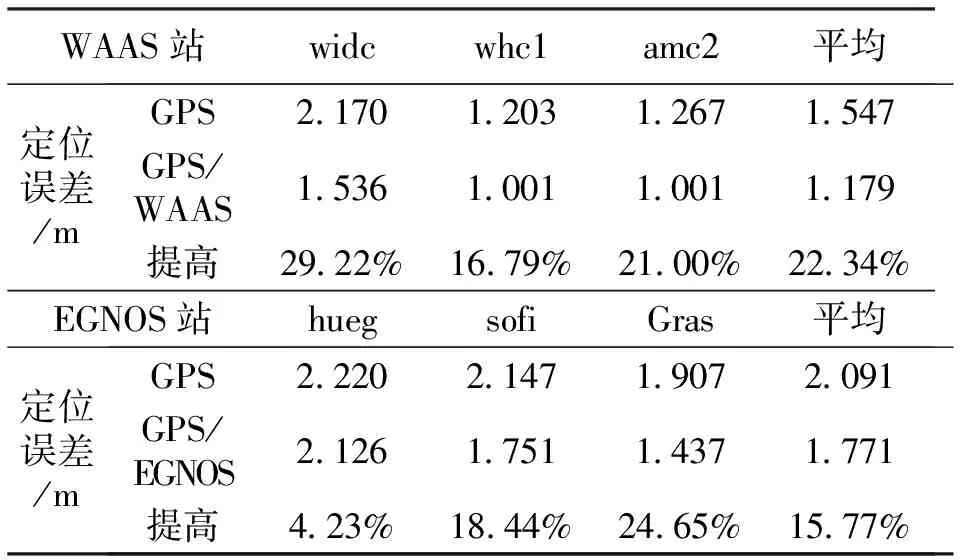
WAAS站widcwhc1amc2平均定位误差/mGPS2 1701 2031 2671 547GPS/WAAS1 5361 0011 0011 179提高29 22%16 79%21 00%22 34%EGNOS站huegsofiGras平均定位误差/mGPS2 2202 1471 9072 091GPS/EGNOS2 1261 7511 4371 771提高4 23%18 44%24 65%15 77%
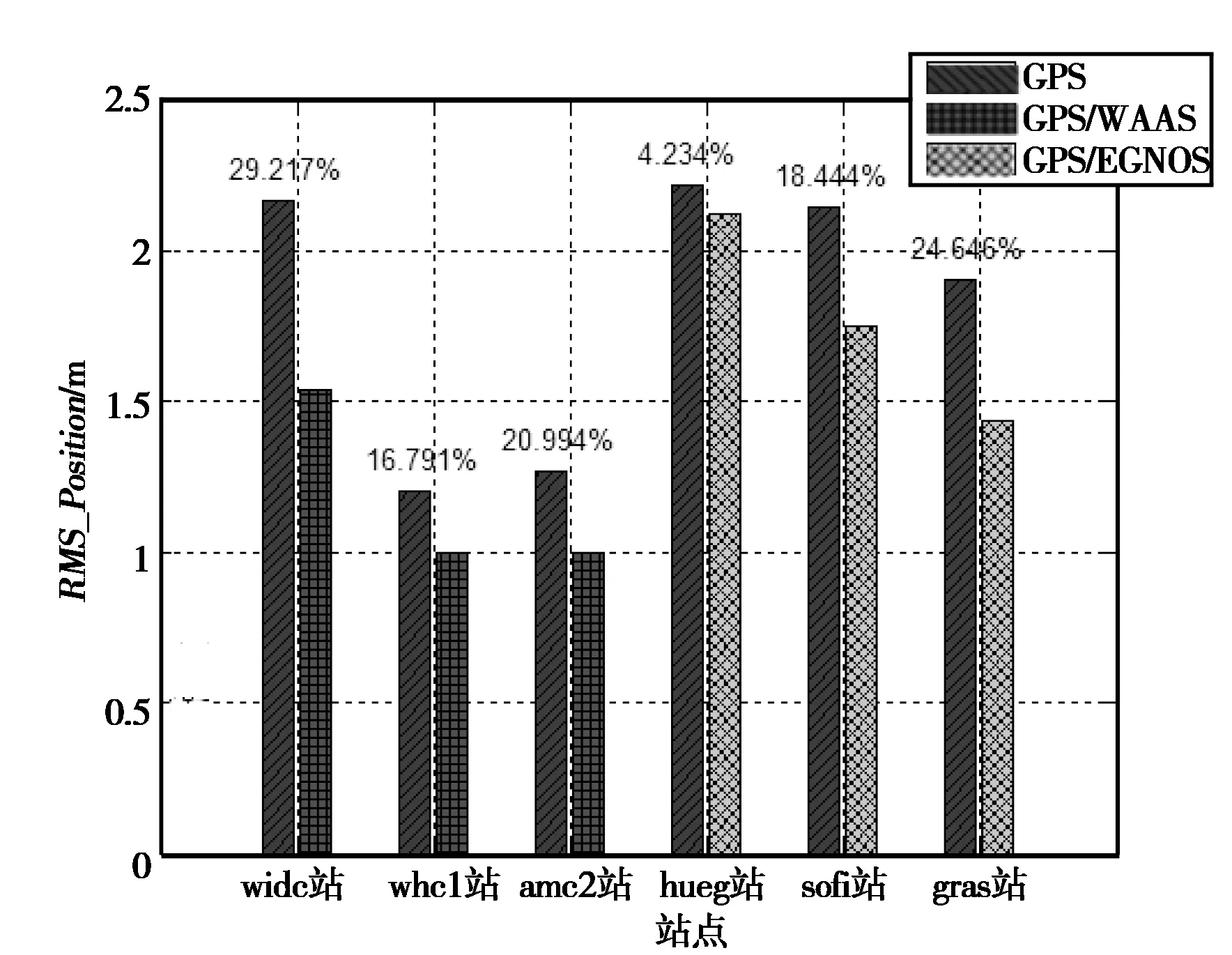
图5 WAAS和EGNOS定位精度统计图
图5中,红色表示GPS基本导航定位精度,蓝色表示WAAS差分定位精度,绿色表示EGNOS差分定位精度。
通过表2和图5的分析结果可以看出,使用WAAS差分改正信息后,美国境内观测站伪距单点定位精度平均提高了约22%,三维定位精度约为1.2 m.欧洲境内观测站使用EGNOS系统差分改正信息后,伪距单点定位精度约为1.8 m,与GPS基本导航定位精度相比,定位精度提高了约16%.
为了进一步分析细节,WAAS系统中选择widc站为例,如图6所示,EGNOS系统中选择gras站为例如图7所示。图中给出两站东西、南北和高程方向的定位误差。其中,红色曲线表示GPS基本导航定位误差,蓝色曲线表示WAAS或EGNOS差分定位误差。在图6中,南北方向定位精度提高了约34%,东西方向提高了约25%,高程方向提高了约29%,WAAS系统对三个方向的定位精度提高大致相当。在图7中,南北方向定位精度提高了约28%,东西方向提高了约6%,高程方向提高了约17%,EGNOS系统对三个方向定位精度的提高程度存在差异,其中对南北方向定位精度的提高最显著,约提高到0.8 m.
3.2SBAS系统完好性服务分析
以美国境内widc站 如图8所示,欧洲境内gras站如图9所示为例,分析WAAS系统保护门限对定位误差的包络情况。其中,红色表示GPS基本导航定位三维误差,蓝色表示WAAS或EGNOS差分定位三维误差,图8和图9中粉色表示水平保护门限,下图中粉色表示垂直保护门限。WAAS系统的垂直保护门限小于16 m,水平保护门限小于15 m.EGNOS系统的垂直保护门限小于14 m,水平保护门限小于12 m.可以看出二者的保护门限值大致相当,均能有效的对定位误差进行包络。
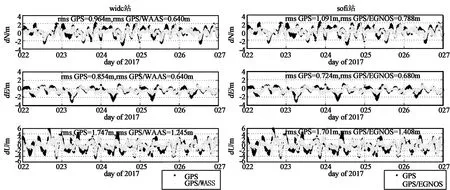
图6 widc站5天定位精度对比 图7 gras站5天定位精度对比
图10、图11分别示出了WAAS系统和EGNOS系统水平和垂直完好性风险,其中色块表示三维定位误差等于其横坐标,且保护限值等于其纵坐标值的历元个数。红色区域表示三维定位误差大于保护门限,即发出危险误导信息,黄色区域为三维定位误差小于保护门限,即不满足CAT-1完好性性能需求,但保护门限大于水平告警限值,白色的区域表示,水平保护门限大于三维定位误差且小于水平告警限值,即满足CAT-1完好性性能需求。
图10左图中,落入红色区域,发出危险误导信息的历元个数为0.落入黄色区域的历元个数为40,占所有历元个数的0.0926%。落入白色区域的满足CAT-1的完好性性能需求的历元个数占所有历元个数的99.9074%.图10右图中,落入红色区域的危险误导信息历元个数为0,落入黄色区域不满足CAT-1的完好性性能需求的历元个数为561,占所有历元个数的1.2986%,落入白色区域的满足CAT-1完好性性能要求的历元个数占所有历元个数的98.7014%.
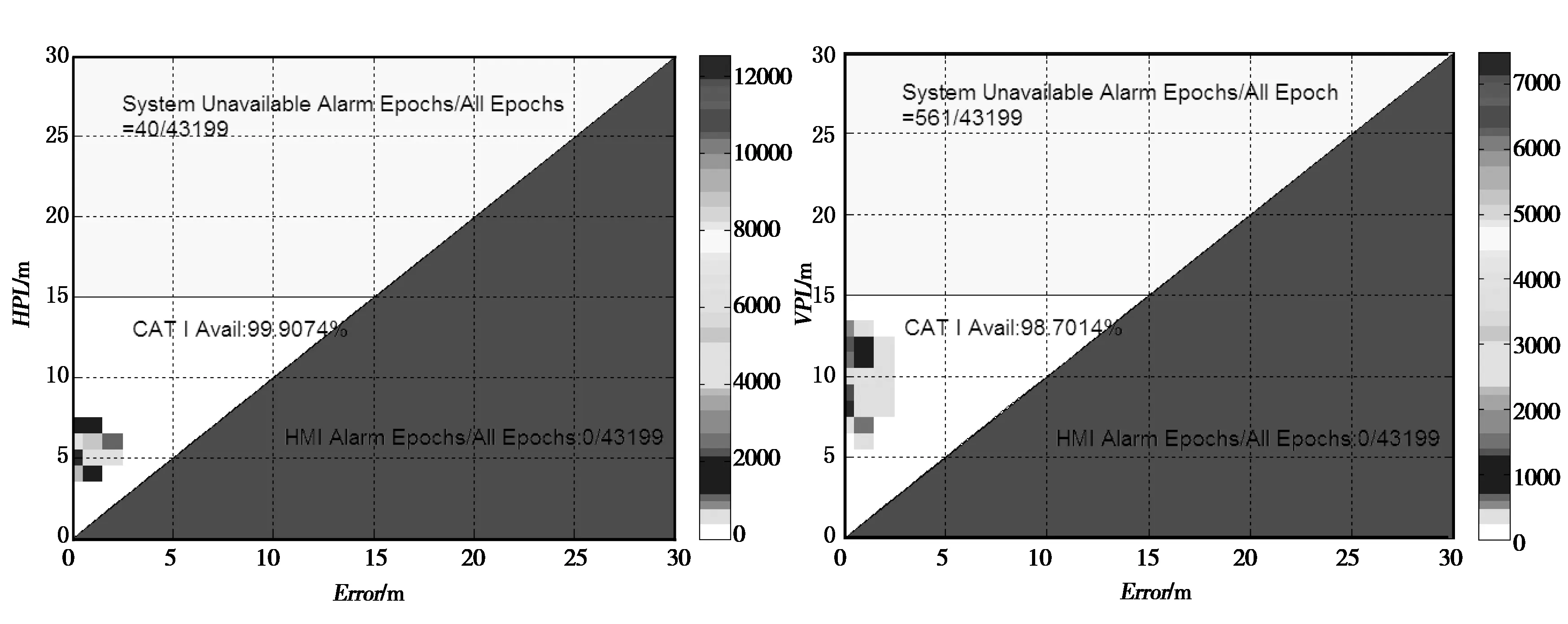
图10 WAAS系统水平和垂直完好性风险统计
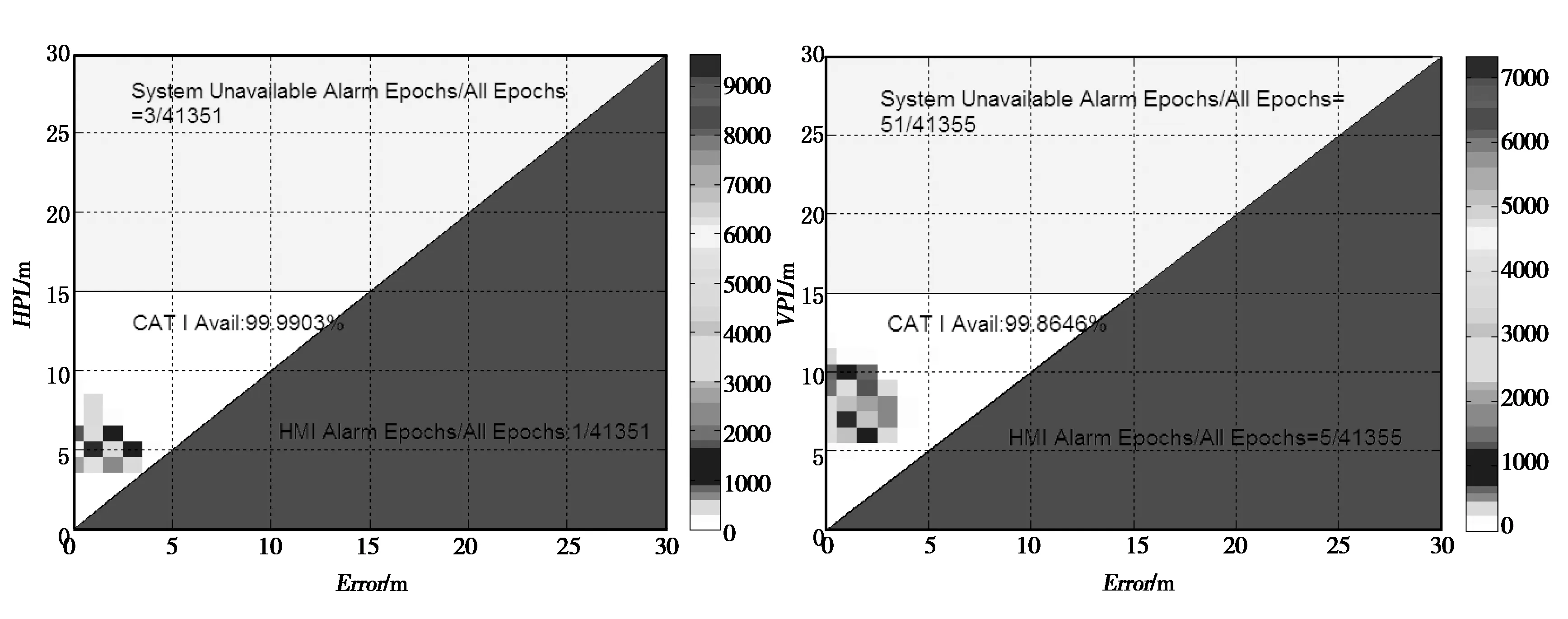
图11 EGNOS系统水平和垂直完好性风险统计
图11示出了EGNOS系统水平和垂直完好性风险。在图11左图中,落入红色区域的危险误导信息历元个数为1,占所有历元个数的0.002418%,落入黄色区域不满足CAT-1的完好性性能需求的历元个数为3,占所有历元个数的0.007254%,落入白色区域的满足CAT-1完好性性能要求的历元个数占所有历元个数的99.9903%.图11右图中,落入红色区域的危险误导信息历元个数为5,占所有历元个数的0.01209%,落入黄色区域不满足CAT-1的完好性性能需求的历元个数为51,占所有历元个数的0.1233%落入白色区域的满足CAT-1完好性性能要求的历元个数占所有历元个数的99.8646%。
4 结束语
WAAS系统和EGNOS系统都遵循RTCA DO-229标准,但两者在电文编码和解码方式上还是存在一些细微差别。在播发的慢变改正信息电文中,WAAS系统通常采用的是(velocitycode=1)模式,而EGNOS通常采用的是(velocitycode=0)模式。WAAS系统和EGNOS系统的差分改正信息时间序列变化特征也不相同, WAAS系统的差分改正信息在卫星出入境时,是连续逐渐变化的过程,而EGNOS系统的差分改正信息在卫星出入境时,会出现阶跃现象,可能与两个系统信息处理的高度截止角相关。WAAS系统和EGNOS系统的差分信息均可以有效地提高用户伪距单点定位精度,WAAS系统伪距单点定位精度约为1.2 m,与GPS基本导航服务相比,可以提高约22%,EGNOS系统伪距单点定位精度约为1.8 m,与GPS基本导航服务相比,可以提高约16%.两个星基增强系统的完好性监测保护门限均值均在16 m以内,对定位误差可以进行有效地包络。WAAS系统的水平和垂直HMI概率为0,EGNOS系统的HMI概率则较大,这与统计数量较少有关。通过分析对比WAAS和EGNOS两个星基增强系统在电文编码、解码方式、差分改正信息变化、差分服务精度、完好性性能上的不同特征,可以为我国的星基增强系统的国际标准化道路提供有价值的参考信息。
[1] 伯恩哈德·霍夫曼-韦伦霍夫,赫伯特·利希特内格尔,埃尔马·瓦斯勒,等.全球卫星导航系统:GPS, GLONASS, Galileo及其他系统[M]. 北京:测绘出版社, 2009.
[2] 宋炜琳,谭述森.WAAS技术现状与发展[J]. 无线电工程, 2007, 37(6):50-52.
[3] 赵爽.国外卫星导航星基增强系统发展概况[J]. 卫星应用, 2013(5):58-61.
[4] EGNOS .About EGNOS[EB/OL].https://egnos-user-support.essp-sas.eu/new_egnos_ops/content/about-egnos.
[5] RTCA. Minimum operational performance standards for global positioning system/wide Area Augmentation System Airborne Equipment: RTCA SC-159[S]. Washington DC: 2006.
[6] 张九宴.GPS差分协议及基准站算法研究[D]. 武汉:武汉大学, 2003.
[7] 曲伟菁,朱文耀,宋淑丽,等.三种对流层延迟改正模型精度评估[J].天文学报,2008, 49(1):113-122.
[8] 范士杰,孔祥元.基于Hatch滤波的GPS伪距相位平滑及其在单点定位中的应用[J].勘察科学技术, 2007(4):40-42.
[9] 王解先.GPS精密定轨定位[M].上海:同济大学出版社,1997.
[10] 牛飞.GNSS完好性增强理论与方法研究[D].郑州: 解放军信息工程大学,2008.
[11] YEH S J,JAN S S.GBAS airport availability simulation tool[J].GPS Solutions,2016,20(2):283-288.
TheServicePerformanceResearchofWAASandEGNOSBroadcastEphemerisDifferentialIntegrityBasedonRTCA
MENGXin1,2,CAOYueling2,LOULizhi1,MAOPengyu1
(1.CollegeofSurveyingandGEO-Informatics,TongjiUniversity,Shanghai200092,China; 2.ShanghaiAstronomicalObservation,ChineseAcademyofSciences,Shanghai200030,China)
To improve the service performance of GPS, many countries and regions have established independent GPS Satellite-Based Augment System(SBAS), providing the broadcast ephemeris differential integrity message to satisfy the high precision and the high integrity users’ needs. This paper introduced the message format of the broadcast ephemeris differential integrity message of SBAS such as WAAS and EGNOS, and analyzed the real broadcast ephemeris differential integrity message of SBAS. The long-time corrections and the fast corrections’change characteristic of the broadcast ephemeris are analyzed in different regions which have the different SBAS and different message processing modes. Based on the GPS data provided by the International GNSS Service (IGS), the algorithm of using the broadcast ephemeris differential integrity message of SBAS are studied, and the positioning accuracy and integrity service of WAAS and EGNOS are compared and analyzed. The result shows that the positioning accuracy of WAAS is about 1.2 m, and the positioning accuracy of EGNOS is about 1.8 m. Compared with GPS basic navigation service, the positioning accuracy of WAAS and EGNOS could be increased by about 22% and 16%. The integrity protection limits calculated by WAAS and EGNOS are roughly equal, within 16 m, and the positioning error can be enveloped.
WAAS; EGNOS; differential; integrity
10.13442/j.gnss.1008-9268.2017.05.001
P228.4
A
1008-9268(2017)05-0001-09
2017-07-07
国家自然科学基金(批准号:41674041,11203059)
联系人: 孟鑫E-mail: 1219752734@qq.com
孟鑫(1992-),女,硕士研究生,主要从事广域增强与完好性。
曹月玲(1983-),女,博士,主要从事广域差分及完好性研究。
楼立志(1972-),男,副教授,主要从事大地测量数据处理。
毛鹏宇(1992-),男,硕士研究生,主要从事GPS气象学。
猜你喜欢
地理空间信息(2022年10期)2022-10-31
导航定位学报(2021年5期)2021-10-13
中国金属通报(2021年9期)2021-08-06
矿山测量(2021年2期)2021-05-07
矿山测量(2020年6期)2021-01-07
导航定位学报(2020年6期)2021-01-05
中国外汇(2020年7期)2020-07-10
全球定位系统(2019年4期)2019-08-30
全球定位系统(2017年6期)2017-02-05
大地测量与地球动力学(2014年1期)2014-02-13
