基于点集合并的修正Hough变换TBD算法
2017-11-23 05:57王国宏李林于洪波
航空学报 2017年1期
王国宏*,李林,于洪波
基于点集合并的修正Hough变换TBD算法
王国宏*,李林,于洪波
海军航空工程学院信息融合研究所,烟台 264001
在低信噪比条件下,基于Hough变换的检测前跟踪算法是进行强杂波背景下目标航迹检测的一种手段。本文针对Hough变换后一个目标产生多条可能航迹以及航迹内可能存在杂波点的问题,提出了一种基于能量最大点和点集合并的修正Hough变换检测前跟踪算法。该算法利用量测点时序、能量信息及目标速度先验信息对Hough变换后点迹进行关联和剔除,能够有效的对目标原始航迹进行回溯。针对高斯噪声背景下的飞行目标,仿真结果表明该算法能够对微弱目标进行有效检测,在目标数目、杂波密度、信噪比发生变化的条件下仍能保持较高的检测概率。
检测前跟踪;Hough变换;门限;回波时序;回波能量
强杂波背景下低信噪比目标的检测和跟踪是目前雷达探测领域所重点研究的问题之一。检测前跟踪(Track-Before-Detect,TBD)技术为解决低信噪比问题提供了一种可能的方法。TBD方法的主要思想是:当目标的SNR较低的时候,不再单帧设立门限,而是根据检测目标的运动情况,对多帧数据存储后再进行处理,对存储数据进行积累后再与门限比较,得到可能的目标航迹,并完成航迹判决[1-2]。当前较为常用的TBD算法主要有:三维匹配滤波(Three Dimensional Matched Filtering,3DMF)TBD算法、动态规划(Dynamic Programming,DP)TBD 算 法、Hough 变 换(Hough Transform,HT)TBD算法、粒子滤波(Particle Filter,PF)TBD 算 法[3-7]。其 中,关 于Hough变换的 TBD(HT-TBD)算法是Carlson等于1994年提出的,主要用于检测直线运动或近似直线运动的低可观测目标[8-10],此后,HT-TBD算法在雷达目标探测领域广泛应用[11-18]。其中,文献[11]在标准HT-TBD算法的基础上,引入了角度约束条件,通过求得的不同帧数据连线形成夹角的大小,判断不同扫描时刻形成的航迹是否共线,对可能航迹进行约束,能够有效减少虚假航迹影响;文献[12]在文献[11]的基础上又加了一个速度选通条件,对不同扫描时刻数据进行速度约束,进一步减少了虚假航迹。但是对于同一目标产生多条航迹以及航迹内可能存在杂波点的问题,仍未得到有效解决。针对此类问题,本文提出了一种基于能量最大点和点集合并的修正HTTBD算法。
首先,在量测点迹粗关联部分采用Hough变换进行处理,在得到多个参数空间过门限分辨单元及其对应的数据空间点迹集合后,利用集合内量测点的回波能量信息、时序信息以及目标的速度先验信息,结合本文航迹检验算法进行点迹的关联和剔除,最后进行航迹判决,将同一目标航迹进行合并,达到剔除虚假航迹和去除航迹内杂波点的目的,得到最终航迹,实现对目标航迹的回溯,得到了较好的检测效果。文章结构如下,第1节介绍了本文采用的目标模型,第2节阐述了算法流程和算法原理,第3节仿真分析,对本文算法进行了仿真验证,并与另外3种HT-TBD算法进行比较,第4节得出本文结论。
1 目标模型
假设目标做匀速直线运动,运动方程为
式中:目标状态向量 Xk=[xkxkykyk]T,xk,yk为目标位 置,xk,yk为目标速 度;F 为 状 态转移矩阵;Vk为方差一定的零均值高斯白噪声序列,各帧间相互独立。
式中:目标量测值Zk=[xkyk]T;H 为量测矩阵;Wk+1为量测噪声序列,服从高斯分布,各帧间相互独立。假设在测距过程中,不会发生测距模糊。
雷达接收到的回波帧数为N,扫描周期为T,各帧雷达回波数据集合表示为
式中:(x,y)为回波点的位置信息;znx,
()y为该点的回波能量信息,时序信息包含在帧序号n中。
式中:δn(x,y)为高斯白噪声,各帧间相互独立,满足δn(x,y)~N(0,σ2);Sn(x,y)为目标在量测时刻n对(x,y)的强度贡献值。
2 算法原理
本文提出的算法从处理过程上可分为3部分,分别为:量测点迹粗关联、航迹检验和点集的比较与合并。算法总体处理框图如图1所示。
2.1 量测点迹粗关联
利用Hough变换进行量测点迹粗关联的基本思想可表述为:变换利用数据和参数两个空间,将参数空间进行离散化,对于接收到的雷达回波信号,在数据空间上设立一个虚警概率较大的第一门限,以滤除一定数目的杂波,对通过第一门限的回波进行Hough变换,将其变换到参数空间,根据参数空间分辨单元进行积累并设立第2门限,对积累数超过第2门限的分辨单元进行Hough逆变换,回到数据空间,认为检测到了目标航迹[19-20]。
具体实现过程为
对于数据空间中一条直线上的点(xi,yi),必有唯一的(ρ0,θ0)与之对应。
通过式(6)可将数据空间的观测点(x,y)变换到参数空间中的一条曲线。
式中:θ∈[0,π],对于同一条直线上的点(xi,yi),变换到参数空间后的所有曲线将交于一点,该点即为直线在参数空间中的特征值(如图2所示)。但是由于实际雷达量测过程中将不可避免的引入量测误差,使得直线运动目标量测点转换到参数空间中后无法交于某一特定的点,而是在一定区域内集中,如图3所示。
因此,对于转换到参数空间的数据,为将目标检测出来,需要将参数空间离散化,分割成大小为Δρ×Δθ的若干小区域,参数空间的具体划分方式为[19]
式中:θn和ρn为参数空间分辨单元中心点;Δθ=π/Nθ,Nθ为参数θ的分割段数;Δρ=L/Nρ,Nρ为参数ρ的分割段数;L为雷达量测范围的2倍。
对于Nθ和Nρ的选取问题,文献[9]指出参数空间不同的划分尺度确实会影响过第二门限后形成的过门限点迹集合,但其值是根据目标速度、虚警概率、检测概率以及信噪比等因素的折中,很难通过一个确定的解析函数得到一个解析数值,一般是通过多次仿真得到一个经验值。
将参数空间离散化后,通过计算参数空间中每条曲线上各离散点值并进行积累,得到参数空间直方图,直方图中超过第2门限的峰值,代表着可能的航迹。
本文算法中第2门限采用点数和能量双重门限,点数积累门限为η2(1),能量积累门限为η2(2),其中点数积累门限可有效防止单个杂波点能量过大所造成的虚警,只有当参数空间分辨单元的点数积累值与回波能量积累值均超过预定门限时,才可认为该分辨单元过第2门限。
假设经过参数空间第2门限后有L个分辨单元的积累值过门限,如图4所示。
图4中阴影区域表示通过第2门限的分辨单元,共有L个,其中每一个分辨单元都对应数据空间的一个量测点迹集合。i、j表示该分辨单元在参数空间中所在位置,l表示该分辨单元在所有过门限分辨单元中对应的序号,l=1,2,…,L。对于每一个量测点迹集合有
式中:ak为集合Alij中的第k 个量测点;(xk,yk)为该量测点在数据空间的位置信息;z (xk,yk)为该点的回波能量信息;n为该点时序信息,即该点来源于第几帧量测数据;Kl为点迹集合内的点数。
通过Hough变换过程后,可以得到若干个代表着可能航迹的点迹集合,这些集合可能是由目标的航迹产生的,也有可能是由杂波点或目标航迹点加杂波点产生的,为对虚假航迹和航迹内杂波点进行有效剔除,就要进行有效的后续可能航迹检验筛选。
2.2 航迹检验
本文航迹检验的方法是利用回波点所携带的回波能量信息和回波时序信息以及目标速度的先验信息进行点迹关联和杂波点的识别剔除,具体实现方法如下:
1)对点迹集合Alij内的点按照其时序信息进行排序,同帧数据纵向排列,不同帧数据按顺序横向排列。
2)利用回波点迹的能量信息从集合Alij内将回波能量最大的数据点选出。
3)以回波能量最大的数据点为起始点,利用目标速度先验信息建立相关波向该点量测时刻之前和之后的时刻分别进行关联。
设xij(n)是点集i中对应时刻n的第j个量测点的x 轴分量,这里i=1,2,…,l,n=1,2,…,N。可将量测值xij(n)与xij(n+1)间的距离矢量定义为
式中:t为两帧量测之间的时间间隔。
同理可得量测值yij(n)与yij(n+1)间的距离矢量diyj(t)为
设观测误差协方差阵为S(n),则归一化距离的平方为
Dij(n)服从自由度为2的χ2分布,根据门限概率查χ2分布表可得门限γ,若Dij(n)≤γ,则可判定两个量测(xn,yn)ij与(xn+1,yn+1)ij关联。
4)将关联上的数据点存入关联后点集,若某一时刻无量测点或无数据点可与之关联,则以预测值代替量测值向下一时刻进行外推关联。
5)当关联后点集内点数超过某一门限λ,认为检测到目标航迹,若回波能量最大点未能通过关联形成航迹,则剔除该点,重复上述步骤。
6)当集合Al内剩余点数小于门限值λ仍未形成航迹时,认为该点迹集合由杂波组成,剔除该点集。
其方法原理框图如图5所示。
2.3 点集的比较与合并
对于经过航迹检验输出的成功关联航迹,若输出结果出现多条航迹,需要对多条航迹进行判断,对于认定为一个目标产生的航迹,需要对其进行合并。本文采用的点集的比较与合并方法是将多条航迹对应的点集进行两两比较,求出两个点集中相同量测点的个数,如果两个点集中相同点的个数超过第3门限,则可以认定进行比较的两个点集是由同一目标产生,需要将这两个点集代表的航迹进行合并,对于两点集中相同时刻产生的不同量测点,本文算法取回波能量大的点作为该时刻目标回波点。
假设雷达接收到的回波帧数为N,那么通过式(14)可得第3门限η3为
具体实现过程如图6所示。
对航迹检验后输出点迹集合进行比较与合并可以实现以下两点作用:首先,对判定为同一目标产生航迹进行合并时,可以实现多条航迹间的互补,避免了单一航迹可能出现的某些时刻量测缺失情况,能够最大程度的对目标航迹进行回溯;其次,对于判定为同一目标所产生的航迹,若同一量测时刻(同帧数据)不止一个量测点,则必然有杂波点被引入,通过本文算法进行处理,可有效去除航迹内混入的杂波点。
3 仿真与分析
假设目标在方位—径向距二维平面内匀速直线运 动,VX=VY=500m·s-1,VX∈ [400,600]m·s-1,VY∈[400,600]m·s-1;雷达扫描周期为2s,测距误差为40m,测角误差为0.1°,积累量测数据为7帧;进行Hough变换对参数空间进行离散化处理时,将参数空间离散化为180×100个分辨单元,Δθ=1°。每帧数据的杂波数服从泊松分布,杂波密度为λ,产生的杂波按均匀分布随机地分布在雷达视域内。
由非相参多帧积累目标检测原理可知,随积累帧数的增多,信噪比改善增强,目标的检测概率增大,为确定算法仿真时需要的积累帧数,在取不同积累帧数下,对杂波密度λ=40,信噪比为2dB时的单一目标进行100次 Monte-Carlo仿真试验,得目标检测概率情况如表1所示。
定义检测概率pd为
式中:Q为 Monte-Carlo仿真试验次数;n为目标数;εqk代表第q次仿真中输出航迹是否包含目标k的航迹。
由表1仿真数据,综合考虑检测概率和计算量,本文仿真采用数据积累帧数N=7。

表1 目标检测概率随积累帧数变化Table 1 Changes of target detection probability with the accumulation period
3.1 杂波密度λ=40时的仿真实验
为验证本文算法的有效性,对杂波密度λ=40,信噪比为2dB时的情况进行仿真验证,目标的初始位置为(35,35)km,将7帧量测数据在数据空间进行叠加,得到如图7所示的杂波点与目标真实量测点分布图,其中目标真实量测点由o表示,杂波点由表示。将图7中数据空间内的点代入式(6)中,将其变换到参数空间,对参数空间离散化并分别进行点数积累和能量积累,得到的参数空间点数积累直方图与能量积累直方图的二维俯视图如图8所示。
在本文仿真过程中,第2门限中取点数积累门限η2(1)=7,能量积累门限η2(2)为能量累加器中最大积累值的0.8倍,经第2门限后得到通过门限的点迹集合,过第2门限的点迹集合中包含多条可能航迹,其中包括真实目标航迹,某些共线杂波点在参数空间积累值过第2门限形成的虚假航迹,以及与真实目标点共线的杂波点所形成的虚假航迹。为有效剔除虚假航迹,航迹内杂波点,减少同源航迹数,需要按照本文算法对过第2门限的点迹集合进行处理,具体方法见2.2节和2.3节,得到处理后结果如图9所示。
比较图7和图9可知,本文算法能够较好的对真实目标航迹进行回溯,其中针对航迹检验后多条同源航迹进行的点集的比较与合并,既能够有效减少同源航迹数目,剔除航迹内可能引入的杂波点,还能够利用多条同源航迹间的量测时刻互补,最大程度的对目标航迹进行回溯。
3.2 增加杂波密度时的仿真实验
为进一步验证本文算法的有效性,当取杂波密度λ=80,信噪比为2dB时进行仿真验证,目标的初始位置仍为(35,35)km,杂波点与目标真实量测点分布情况如图10(a)所示,检测结果如图10(b)所示。由图10的仿真结果可知,在增加杂波密度后,本文算法仍然能够对目标航迹进行有效回溯。
3.3 增加目标数目时的仿真实验
当取杂波密度λ=80,信噪比为2dB,将目标个数增加为3个时进行仿真验证,3个目标的初始位置为(35,35)km,(37,33)km,(33,37)km,杂波点与目标真实量测点分布情况如图11(a)所示,检测结果如图11(b)所示。由图11的仿真结果可知,在增加目标数目后,本文算法仍然能够对目标航迹进行有效回溯。
为分析不同信噪比下算法的收敛情况,本文在杂波密度λ=80,目标个数为3,不同信噪比条件下,通过100次Monte-Carlo仿真后,给出了算法对各个目标的检测概率以及3个目标均被检测到的检测概率随信噪比的变化情况,如图12所示。图12中横坐标为信噪比,纵坐标为检测概率,由图中可以看出3个目标各自的检测概率随SNR的变化情况以及总体检测概率(3个目标同时被检测到的概率)随SNR的变化情况。通过对图中检测概率曲线进行分析可知,单个目标的检测概率在SNR为3dB时仍能保持0.8以上的检测概率,3个目标同时被检测到的总体检测概率也达到了0.6,由此可以看出本文算法在强杂波背景下对微弱目标较好的检测能力。
下面,为进一步分析多目标情况下目标间距离对算法性能的影响,本文在杂波密度λ=80,目标个数为3,信噪比为4dB的条件下,进行了100次Monte-Carlo仿真,得到了不同目标距离间隔下,算法检测概率变化情况,如表2所示。
通过对表2中数据分析可知,在目标间距离大于1 500m时,算法能够保持对目标进行稳定检测,但当目标间距离小于1 500m时,算法对目标的检测性能开始出现下降,结合本文算法原理进行分析可知,当目标间距离较小时,不同目标间量测点易发生混叠,在对点迹集合进行比较与合并时会出现将多个目标判定为一个目标进行合并,从而造成检测概率降低。

表2 目标检测概率随目标间隔变化Table 2 Changes of target detection probability with the target distance
3.4 与文献[11-12]算法对比
对于基于Hough变换的航迹检测问题,文献[11]与文献[12]中的方法是目前引用较为广泛的,因此为更为直观地体现本文算法对于消除虚假航迹、剔除航迹内杂波点以及对目标进行回溯的有效性,接下来本文将采用文献[11]与文献[12]中3种不同的 HT-TBD算法,利用3.1中数据对目标航迹进行回溯,并对仿真结果进行分析,仿真结果如图13至图15所示,其中图13为采用文献[11]中普通HT-TBD算法的仿真结果图,图14为采用文献[11]中角度约束的 HTTBD算法的仿真结果图,图15为采用文献[12]中角度和速度约束的HT-TBD算法的仿真结果图。
由图13可以看出,在使用文献[11]中未考虑角度和速度约束的HT-TBD算法对通过第2门限的点迹集合进行处理后,形成了大量的回溯航迹,其中包含大量的虚假航迹和杂波点,因此采用该算法无法对目标航迹进行有效回溯。通过图14仿真结果可知,在采用文献[11]中考虑角度约束的HT-TBD算法对过第2门限的点迹集合进行处理后,相比图13结果虽然回溯航迹数有明显减少,但仍然存在较多的虚假航迹和杂波点迹,仍无法对目标航迹进行有效回溯。图15中,在采用了文献[12]中考虑角度和速度约束的HT-TBD算法后,能够较好的对目标航迹进行回溯,但仍存在同一目标产生多条回溯航迹和回溯航迹中易混入杂波点的问题。
3.5 目标发生机动时算法性能分析
本文上述仿真主要针对做匀速直线运动目标进行仿真分析,为进一步分析目标发生机动时本文算法性能,进行如下分析。
假设目标在x-y坐标系中作匀加速运动,初始状态为[x0v0xaxy0v0yay],其中,加速度ax和ay都是常量,并且v0x,ax,v0y,ay均不为0,则目标运动方程为
当目标初始速度方向与加速度方向相同时,目标作匀加速直线运动,此时定义为直线机动;当目标初始速度方向与加速度方向不相同时,目标作匀加速曲线运动,此时定义为曲线机动。针对以上两种不同的机动方式,本文分别进行仿真,对本文算法性能进行分析。
仿真时设定杂波密度λ=80,信噪比为4dB,目标的初始位置为(35,35)km,目标初始速度v0x=v0y=500m·s-1,通过设定不同的加速度,观察目标检测概率变化情况,Monte-Carlo仿真次数为100次,仿真结果如表3所示。
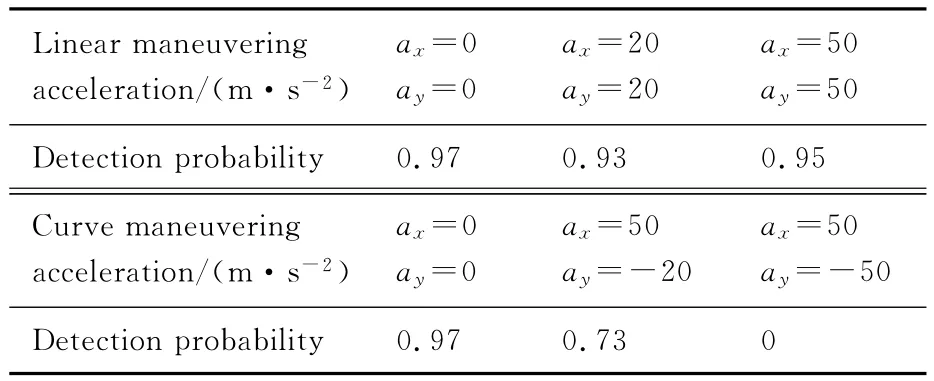
表3 目标检测概率随目标加速度变化Table 3 Changes of target detection probability with target acceleration
由表3仿真结果可以看出,当目标在直线上作匀加速运动时,对算法检测性能影响不大,但当目标初始速度方向与加速度方向不同,目标发生曲线机动时,算法对目标检测性能下降较大,当目标作较大角度的曲线机动时,算法失效。对照本文算法原理分析不难发现,本文采用的是直线Hough变换进行空间映射,对于曲线运动目标,无法在参数空间分辨单元中进行有效积累,实现目标检测。如果想要利用Hough变换对曲线运动目标进行有效检测,可以考虑使用椭圆Hough变换或抛物线Hough变换进行检测。在下一步的研究工作中,可以考虑建立适当模型,对目标曲线机动时的检测跟踪问题进行研究。
4 结 论
针对直线运动微弱目标的航迹检测问题,本文提出了一种基于能量最大点和点集合并的修正HT-TBD算法。通过仿真证明本文算法能够在信噪比较低的情况下,对目标航迹进行有效回溯,并通过仿真与文献[11]和文献[12]中3种不同的HT-TBD算法进行比较,证明本文算法在剔除虚假航迹、杂波点迹,减少同源航迹方面具有较好的检测能力。
[1] ORLANDO D,VENTURINO L,LOPS M,et al.Trackbefore-detect strategies for STAP radars[J].IEEE Transactions on Signal Processing,2010,58(2):933-938.
[2] ORLANDO D,RICCI G,BAR-SHALOM Y.Track-before-detect algorithms for targets with kinematic constraints[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(3):1837-1849.
[3] WANG G H,TAN S C,GUAN C B.Multiple model particle filter track-before-detect range ambiguous radar[J].Chinese Journal of Aeronautics,2013,26(6):1477-1487.
[4] YU H B,WANG G H,CAO Q.Fusion based particle filter TBD algorithm for dim targets[J].Chinese Journal of Electronics,2015,24(3):590-596.
[5] 赵志超,饶彬,王雪松,等.基于概率网格Hough变换的多雷达航迹起始算法[J].航空学报,2010,31(11):2209-2215.ZHAO Z C,RAO B,WANG X S,et al.Multi-radar track initiation algorithm based on probabilistic grid Hough transform[J].Acta Aeronautica et Astronautica Sinica,2010,31(11):2209-2215(in Chinese).
[6] 张鹏,张林让.基于动态规划的雷达弱目标检测前跟踪算法[J].西北大学学报(自然科学版),2014,44(6):898-903.ZHANG P,ZHANG L R.A track-before-detect algorithm based on dynamic programming for radar dim target detection[J].Journal of Northwest University (Natural Science Edition),2014,44(6):898-903(in Chinese).
[7] 吴孙勇,廖桂生,杨志伟,等.基于改进粒子滤波的微弱目标检测前跟踪算法[J].系统工程与电子技术,2010,32(9):1875-1879.WU S Y,LIAO G S,YANG Z W,et al.Improved trackbefore-detect algorithm for weak targets based on particle filter[J].Systems Engineering and Electronics,2010,32(9):1875-1879(in Chinese).
[8] CARSON B D,EVANS E D,WILSON S L.Search radar detection and track with the Hough transform part I:system concept[J].IEEE Transactions on Aerospace and Electronic Systems,1994,30(1):102-108.
[9] CARSON B D,EVANS E D,WILSON S L.Search radar detection and track with the Hough transform part II:detection statistics[J].IEEE Transactions on Aerospace and Electronic Systems,1994,30(1):109-115.
[10] CARSON B D,EVANS E D,WILSON S L.Search radar detection and track with the Hough transform part III:detection performance with binary integration[J].IEEE Transactions on Aerospace and Electronic Systems,1994,30(1):116-125.
[11] CHEN J,LEUNG H,LO T,et al.A modified probabilistic data association filter in real clutter environment[J].IEEE Transactions on Aerospace and Electronic Systems,1996,32(1):300-314.
[12] LEUNG H,HU Z,BLANCHETTE M.Evaluation of multiple target track initiation techniques in real radar tracking environments[J].IEE Proceedings on Radar,Sonar and Navigation,1996,143(4):246-254.
[13] 刘剑,赵艳丽,罗鹏飞.基于Hough变换的低可观测海面运动目标检测[J].系统工程与电子技术,2004,26(3):393-395.LIU J,ZHAO Y L,LUO P F.Detection of lowlying sea surface moving target via Hough transform[J].Systems Engineering and Electronics,2004,26(3):393-395 (in Chinese).
[14] 金术玲,梁彦,潘泉,等.基于Hough变换和聚类的航迹起始算法[J].系统仿真学报,2009,21(8):2362-2385.JIN S L,LIANG Y,PAN Q,et al.Track initiation algorithm based on Hough transform and clustering[J].Journal of System Simulation,2009,21(8):2362-2385 (in Chinese).
[15] 孔敏.天波超视距雷达目标跟踪技术研究[D].烟台:海军航空工程学院,2007.KONG M.Research on target tracking technology for over-the-horizon radar[D].Yantai:Naval Aeronautical and Astronautical University,2007(in Chinese).
[16] MOYER L R,SPAK J,LAMANNA P.A multi-dimensional Hough transform based track-before-detect technique for detecting weak targets in strong clutter backgrounds[J].IEEE Transactions on Aerospace and Electronic Systems,2011,47(4):3062-3068.
[17] 柳树林,陈新亮.基于航迹检验的雷达检测前跟踪新算法[J].北京理工大学学报,2012,32(12):1269-1272.LIU S L,CHEN X L.A new track-before-detect algorithm based on track detection[J].Transactions of Beijing Institute of Technology,2012,32(12):1269-1272 (in Chinese).
[18] 郭云飞,郑晓枫,彭冬亮,等.基于遍历Hough变换的弱目标检测前跟踪算法[J].系统仿真学报,2015,27(6):1316-1323.GUO Y F,ZHENG X F,PENG D L,et al.Track-before-detect algorithm for weak target based on Ergodic Hough transform [J].Journal of System Simulation,2015,27(6):1316-1323(in Chinese).
[19] 何友,修建娟,张晶炜,等.雷达数据处理及应用[M].北京:电子工业出版社,2006:91-98.HE Y,XIU J J,ZHANG J W,et al.Radar data processing with applications[M].Beijing:Publishing House of E-lectronics Industry,2006:91-98(in Chinese).
[20] 王国宏,孔敏,何友.Hough变换及其在信息处理中的应用[M].北京:兵器工业出版社,2005:2-4.WANG G H,KONG M,HE Y.Hough transform with applications in information processing[M].Beijing:Enginery Industry Press,2005:2-4(in Chinese).
A modified Hough transform TBD algorithm based on point set merging
WANG Guohong*,LI Lin,YU Hongbo
Institute of Information Fusion,Naval Aeronautical and Astronautical University,Yantai 264001,China
On the condition of low SNR,track-before-detect(TBD)based on Hough transform (HT)has been proposed as a means for target detection in strong clutter environment.For the problem of too many possible tracks from one target and clutter points mix in the target track after Hough transform,a modified Hough transform track-before-detect algorithm based on the maximum energy point and point set merging is proposed in this paper.The algorithm can be used to effectively realize point matching,point eliminates and track initiation by using the prior information of target velocity,and temporal and energy information of the points.The simulation results show that the weak target under the background of Gaussian noise can be effectively detected according to the algorithm proposed,and the target detection probability is still high when the target number,clutter density and SNR change.
track-before-detect;Hough transform;threshold;echo sequence;echo energ y
2016-01-05;Revised:2016-01-25;Accepted:2016-03-09;Published online:2016-03-21 10:35 URL:www.cnki.net/kcms/detail/11.1929.V.20160321.1035.004.html
s:National Natural Science Foundation of China(61372027,61501489,61671462)
V243.2;TN957
A
1000-6893(2017)01-320009-11
http:/hkxb.buaa.edu.cn hkxb@buaa.edu.cn
10.7527/S1000-6893.2016.0068
2016-01-05;退修日期:2016-01-25;录用日期:2016-03-09;网络出版时间:2016-03-21 10:35
www.cnki.net/kcms/detail/11.1929.V.20160321.1035.004.html
国家自然科学基金 (61372027,61501489,61671462)
*通讯作者 .E-mail:wangguohong@vip.sina.com
王国宏,李林,于洪波.基于点集合并的修正Hough变换TBD算法[J].航空学报,2017,38(1):320009.WANG G H,LI L,YU H B.A modified Hough transform TBD algorithm based on point set merging[J].Acta Aeronautica et Astronautica Sinica,2017,38(1):320009.
(责任编辑:苏磊)
*Corresponding author.E-mail:wangguohong@vip.sina.com
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
舰船科学技术(2022年11期)2022-07-15
汽车实用技术(2022年4期)2022-03-07
雷达与对抗(2020年2期)2020-12-25
火控雷达技术(2020年2期)2020-10-16
雷达科学与技术(2020年4期)2020-09-11
雷达与对抗(2020年1期)2020-06-05
兵器装备工程学报(2020年3期)2020-04-22
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
火力与指挥控制(2019年4期)2019-06-14