面向山地区域光照变化下的鲁棒景象匹配方法
2017-11-16 02:12:02王华夏程咏梅刘楠
航空学报 2017年10期
王华夏,程咏梅,刘楠
1.西北工业大学 自动化学院,西安 710072 2.太原科技大学 电子信息学院,太原 030024
面向山地区域光照变化下的鲁棒景象匹配方法
王华夏1,2,*,程咏梅1,刘楠1
1.西北工业大学 自动化学院,西安 710072 2.太原科技大学 电子信息学院,太原 030024
提出了一种面向山地区域光照变化下的鲁棒景象匹配导航方法。该方法针对山区景象匹配导航中光照环境不同造成的基准图与实时图像不一致问题,采取在高程数据上使用光照模型生成光照明暗图,利用数字高程图(DEM)得到水流汇集数据并生成山谷显著图,将光照明暗图与山谷显著图融合作为基准图;针对基准图与实时图中细节边缘的差异带来的误匹配问题,提出了基于形态学约束的Hausdorff距离边缘匹配算法。采用LANDSAT图像与ASTERDEM高程数据进行实验分析,结果表明提出的方法匹配正确率高且鲁棒性好。
景象匹配导航;光照模型;显著边缘;Hausdorff距离;图像融合
图像匹配导航是利用机载基准图像与实时获取的图像进行匹配,确定出飞行器位置。该技术由于具有自主性和定位精度高的优点成为一种重要的导航方式,与惯性导航系统(INS)组合可实现长航时、高精度的自主导航。图像匹配导航技术可以分为地形高程匹配导航和景象匹配导航两大类,其中地形高程匹配导航是采用激光雷达、合成孔径雷达干涉(INSAR)或序列图像重建地形的方法[1-5]获取实时地形,与机载基准数字高程图(Digital Elevation Model,DEM)进行匹配,实现飞行器定位,激光雷达与INSAR获取的地形数据精度高但设备成本昂贵,而可见光序列图像对地形进行恢复要求有充足的图像重合区域和稠密稳定的特征点,在山区中不易获取[6-7];景象匹配导航技术是利用合成孔径雷达(SAR)或光学图像传感器实时获取地面景物图像与机载基准图像进行匹配,实现飞行器定位,目前景象匹配主要针对具有特定结构以及人造目标的城镇区域,在缺乏人造建筑、颜色特征单一的山区,难以提取稳定而独特的结构与色彩特征[8-9],并且由于成像时间不同、光照条件不同使得实时获取的图像与基准图像在灰度以及边缘信息上存在较大差异,若采用固定图像作为基准图,易发生误匹配,故对于山区景象匹配的基准图像制备是一个研究的热点和难点。文献[10]针对山地区域的景象匹配导航提出了一种基于GRRR(Geo-Registered Radar Returns)数据构造可见光仿真图像的景象匹配方法,但构造基准图时没有充分考虑山区中反射系数差异较大的山谷区域。而利用DEM数据可获取山谷水文信息[11],结合DEM数据与光照模型以及水文信息构造一种抗光照变化、计算快速、可在线生成的基准图是一种新颖的思路。
山区景象的边缘特征丰富,通过模型构造的基准图像与实时图像在图像的细节边缘上存在差异,如何在这种差异存在的情况下实现正确的局部匹配是景象匹配的另一个问题。由于霍斯多夫距离(Hausdorff Distance,HD)具有对边缘局部形变不敏感、不要求所有匹配点严格对应、计算快捷的优点,因此在图像匹配中得到了广泛的应用,但HD极易受到出格点的影响,当边缘图像受到噪声污染或存在遮挡等情况时,易造成误匹配。文献[12]提出了PHD (Partial HD),在距离集中选择特定排位的距离值作为单向HD以减小出格点的影响;文献[13]提出了MHD (Modified HD),对距离集取均值以减小出格点的影响,但PHD与MHD对出格点的排除能力有限;文献[14]提出了LTSHD (Least Trimmed Square HD)与M-HD (M-estimation HD),这两种算法采用鲁棒回归与野点检测的思想进一步提升了HD排除出格点的能力;文献[15]在M-HD的基础上提出了AM-HD (Accurate M-HD)距离,引入边缘的方向信息对M-HD进行权重调整,虽然以上方法在处理遮挡与退化图像的匹配问题时已具有较好的性能,但当基准图与实时图的细节边缘差异较大、实时图存在噪声的情况下,误匹配率较高。
针对以上问题,本文提出一种新型的景象匹配导航方法。首先在DEM数据上采用光照模型生成明暗图像;然后由DEM数据提取山谷信息,以表达反射特性与周围环境差异较大的山谷河流区域;随后融合光照明暗图与山谷信息图像生成融合图像作为基准图,对实测图像与基准图像采用MLSEC(Multi-local Level-Set Extrinsic Curvature)方法提取显著的边缘信息;在边缘匹配过程中,采用了形态学方法对初始边缘点集进行约束,利用约束前后的公共邻近边缘点数量对HD进行权值校正,进一步减少了出格点、提高了正确匹配位置的HD峰值特性。最后采用LANDSAT图像与ASTERDEM数据验证了本文方法的鲁棒性与有效性。
1 光照变换下的鲁棒基准图制备方法
由于光照条件不同,三维物体的成像不同,如图1所示,图1(a)、图1(d)为不同时间段拍摄的秦岭山区可见光图像,两幅图像成像的光照条件差异较大(图1(a)拍摄时间为2014/12/30,当地太阳高度角为30°,太阳方位角为156°;图1(d)拍摄时间为2016/7/28,当地太阳高度角为64°,太阳方位角为118°);图1(b)、图1(e)为图1(a)、图1(d)对应的CANNY[17]边缘特征;图1(c)、图1(f)为图1(a)、图1(d)对应的MLSEC边缘特征。本文采用互相关方法与Hausdorff测度,分别对图1中的3种图像进行了计算分析:图1(a)与图1(d)全局互相关系数为0.47,图1(b)与图1(e)的全局HD距离为27.4,图1(c)与图1(f)的全局HD距离为6.8;随机选取图1(d)、图1(e)、图1(f)中的部分区域分别与图1(a)、图1(b)、图1(c)进行局部匹配定位并进行蒙特卡罗仿真, 由表1可见,3种图像的局部匹配正确率都非常低。
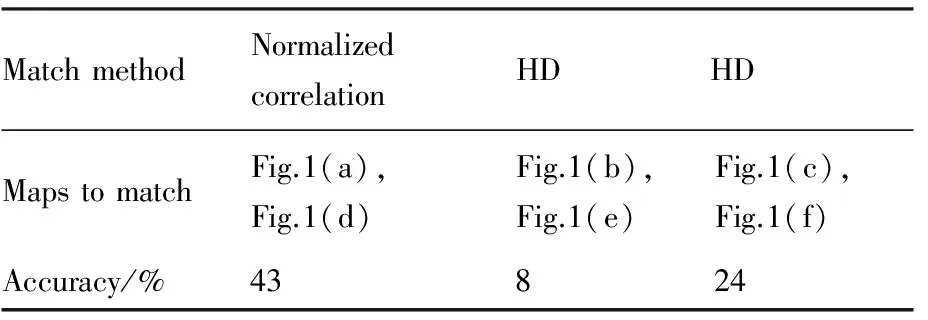
MatchmethodNormalizedcorrelationHDHDMapstomatchFig.1(a),Fig.1(d)Fig.1(b),Fig.1(e)Fig.1(c),Fig.1(f)Accuracy/%43824
由此可知,光照条件差异较大造成图像灰度差异大、全局相关性低、边缘特征不一致、图像不适配。若采用固定时刻拍摄的图像作为基准图,无法保障正确匹配以及后续的飞行器准确定位,因此需要寻找一种抗光照变化的基准图制备方法。
1.1 光照明暗图
由于三维物体所成的图像取决于:① 物体的形状;② 物体表面对光的反射特性;③ 光源的分布。地物所在的地形环境及相对太阳的位置不同,使得同一时刻不同地形条件下的地表所接收到的光辐射强度不同,而在不同时刻同一地形的辐射强度也会有差异[18]。
Lambert光照模型如图2所示,设辐照强度为E的光源S照射在Lambert表面的象元O上,灰色圆形区域是光线入射点O所处地形区域的切平面,则该象元的辐射强度L为
L=Ecosγ
(1)
式中:γ为光线OS与物体表面法向量fON的夹角。当象元O处的切平面水平时,fON与天向轴fOZ重合,γ与太阳天顶角θz相同;当象元O处的切平面不水平时,以O为原点的单位球面与fOS、fON、fOZ相交于点IO、NO、ZO,构成球面三角形ΔIONOZO,根据球面三角形关于边的余弦定理[19],可知
cosγ=cosθpcosθz+sinθpsinθzcos(φa-φo)
(2)
式中:θp为地形坡度角,是地形切平面与水平面的夹角;φo为地表法线方位角,为ON在水平面投影向量与正北方向的夹角,θp、φo与DEM数据相关,通过DEM象元及其邻域象元的关系求取;φa为太阳方位角;θz为太阳天顶角;θH为太阳高度角,其中θz+θH=π/2,θH、φa与太阳位置和当地位置有关,通过时间和当地经纬可推算得出。
在天气晴好的情况下,基于平行光源假设的地表光照模型反映了物体表面所接收到的太阳辐射量,可通过为DEM栅格数据中的每个高程象元指定太阳高度、太阳方位角,来计算地表的模拟亮度值,设光照强度E=1,观测方向为正下视,根据成像位置DEM数据以及成像时间与当地的经纬可生成光照明暗灰度图像:
Map_hillshade(i,j)=255cosγi,j
(3)
式中:γi,j为DEM(i,j)处表面法向量与太阳光线的夹角。
由于基于平行光源的Lambert模型未考虑阳光被大面积遮挡或入射光线为散射光时的情况,故阴天以及雨雪天气不在本文研究范围内。由此模型在不同时间生成的光照明暗图如图3所示,展现了由光照模型与地形数据生成的明暗信息。由于光照明暗图的生成是基于物体表面反射系数一致的情况,而山区包括山谷、道路与植被覆盖的山体,反射系数不完全一致,因此明暗图不能完整的描述成像信息。
1.2 山谷显著图
山区可见光图像的显著边缘除了由光照产生的明暗边缘外,其余的显著边缘主要集中于山谷,其原因是山谷区域表面无植被覆盖,其光学反射率与植被覆盖的山地差异较大。山谷大多由水流冲刷产生,而DEM数据本身包含了地形的高低变化的规律[20],因此可通过分析DEM数据的高度变化而获取水文信息并得到山谷显著图。

图2 Lambert光照模型Fig.2 Lambert illumination model
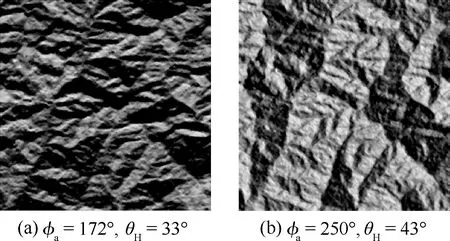
图3 同一地形区域不同时间产生的光照明暗图Fig.3 Hillshade map at different times in same terrain
山谷信息及其显著图像的获取步骤如下:
1) 水流方向。首先依据DEM像素单元八邻域的数据下降梯度来指定水流方向,并进行水流方向的编码:
MD(i,j)=
(4)
式中:DEM(i,j)为该单元的高程值;S为元素DEM(i,j)八邻域的像素位置集合,第k个邻域的位置为Sk=[pk,qk](k=0,1,…,7);水流方向MD(i,j)记录最大梯度下降方向的邻域编码位置。若中心像素位置对应的高程数据低于周围八邻域的高程数据,该中心的高程值设定为八邻域中最低高程;若同时存在多个最大下降梯度方向,采用查表方式来进行水流方向的判断;若所有邻域的梯度相同,采用递归的方式进行水流方向的计算[21]。
2) 水流汇集数据。由水流方向数据可知像素单元(i,j)的八邻域的水流方向,标记其中水流方向指向中心(i,j)的单元格为1,其他为0;按行或列依据标记数据矩阵flag对水流汇集数据FA进行遍历累加,在遍历过程中更新并得到水流汇集数据,水流汇集数据如式(5)和式(6)所示,其中FA(i,j)的初始值为0。
flag(i,j,Sk)=
(5)

(6)
3) 山谷显著图。水流汇集数据FA(i,j)的单元累加值越大,说明汇集到该像素中的水流越多,越可能属于山谷地区,由于水流汇集数值并不均匀分布,若直接将水流汇集数据转化为灰度图像,将得不到理想可视化山谷信息(如图4(a)所示)。
采用阈值th对水流汇集数据进行规范后作为山谷信息的显著图像,其中阈值th为DEM总像素数量的1.5%,即当水流汇集数据大于th时不再增大其在图像中的亮度影响,减少灰度级别,增大主要山谷区域的对比度。山谷信息图像生成算法如式(7)所示。图4(b)为由DEM数据生成的山谷信息显著图像,该图像以灰度图的形式展现了DEM数据中的山谷。
Map_valley(i,j)=
(7)
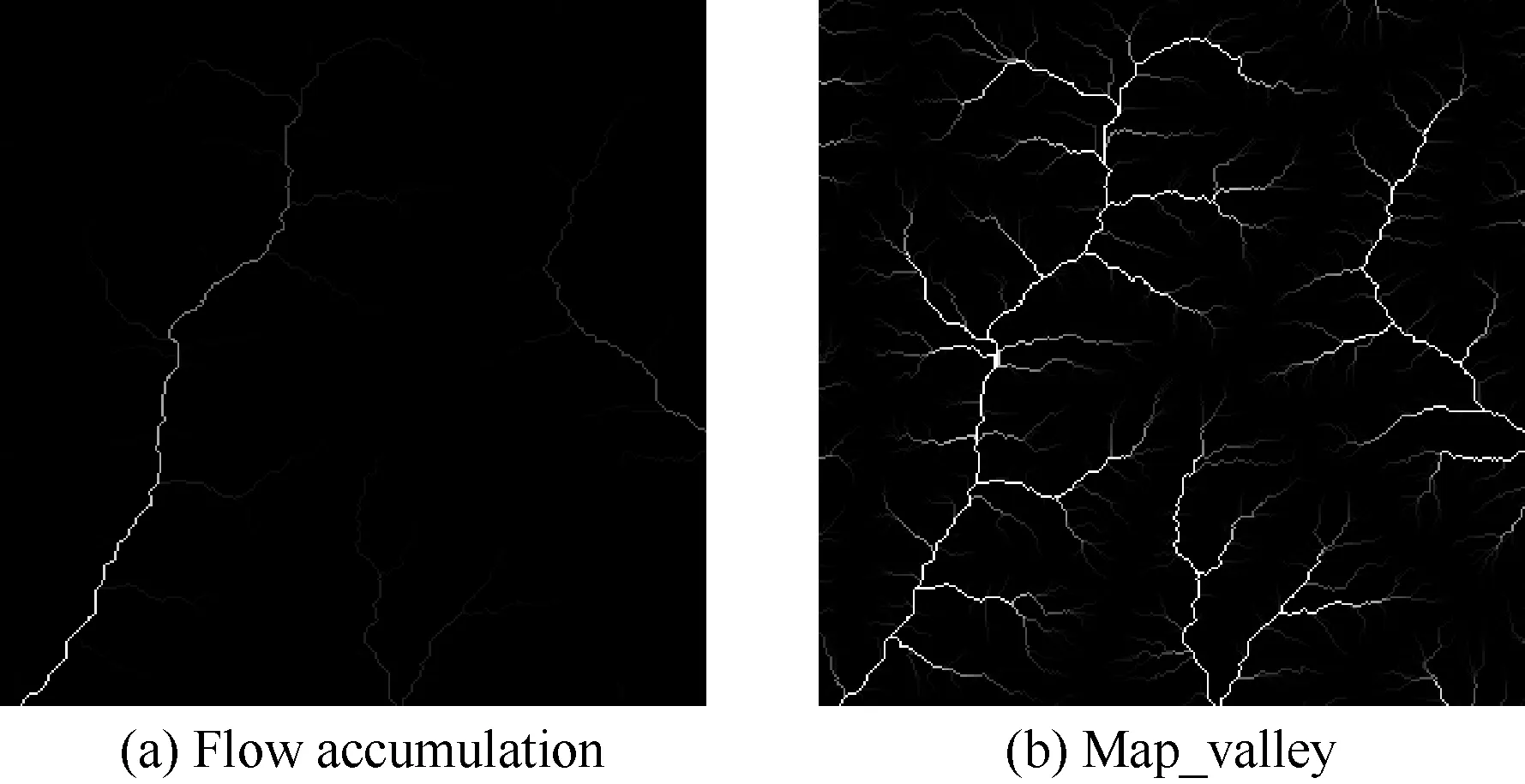
图4 山谷显著图像Fig.4 Images of significant valleys
1.3 光照明暗图与山谷显著图的融合图像
光照明暗图像缺失了山谷信息所呈现的显著边缘,而山谷显著图无法表达由光照引起的明暗交界的显著边缘。故采用加权融合方法,将光照明暗图与山谷显著图融合,生成一种包含两种信息的融合图像,融合方法如式(8)所示。
Map_fusion=
W·Map_vally+(1-W)·Map_hillshade
(8)
式中:W(0≤W≤1)为融合权重,当W趋近0时,融合图像退化为光照明暗图,当W趋近1时,融合图像退化为山谷显著图。
从真实图像与融合图像相似性的角度出发,采用最小均方根误差(Root Mean Square Error,RMSE)方法考察融合权值W对图像质量的影响,图5为不同W权重下,归一化的融合图像与真实图像的RMSE,图6展示了W权重对Hausdorff算法局部匹配正确率的影响,统计数据表明在W取值为0.3~0.4时,融合图像与真实图像的RMSE最小,同时对应的4种Hausdorff匹配算法的局部匹配正确率也最高。通过大量真实图像与融合图像的RMSE后验计算可获取W的经验值为

(9)
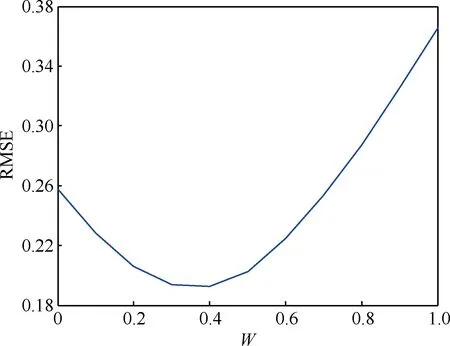
图5 不同融合权重下融合图像与真实图像的RMSEFig.5 RMSE of fusion and real images with different fusion weights
融合图像与其边缘图像如图7所示,其中图7(a)为可见光图像,图7(b)为光照明暗图,图7(c)为山谷显著图像,图7(d)为融合图像,图7(e)、图7(f)、图7(g)、图7(h)分别是图7(a)、图7(b)、图7(c)、图7(d)提取的MLSEC边缘图像,其中对图7(c)采用MLSEC边缘提取是为了保持边缘机理的一致性。由图可见,图7(h)不仅具有光照产生的明暗边缘,还包含较为完善的山谷显著边缘信息,与可见光边缘图7(e)更具一致性。在317×317大小的图7(e)中随机截取60×60大小区域作为实时边缘图像,采用4种HD方法分别与图7(f)、图7(g)、图7(h)进行局部匹配,设定定位误差小于5个像素单位为正确匹配,对匹配正确率进行蒙特卡罗统计实验,实验结果如表2所示,以图7(h)为基准图的局部匹配正确率最高,而以图7(f)为基准图的匹配正确率高于以图7(g)为基准图的匹配正确率,由此说明:光照明暗图产生的边缘信息在边缘匹配中做了主要贡献;由于山谷边缘信息稀疏,使得山谷显著边缘作为基准图的匹配正确率很低;而采用融合图像的边缘图像作为基准图得到了提升匹配正确率的效果;同时也侧面验证了光照明暗图在融合图像中起的作用较大,应给予更高的权值。
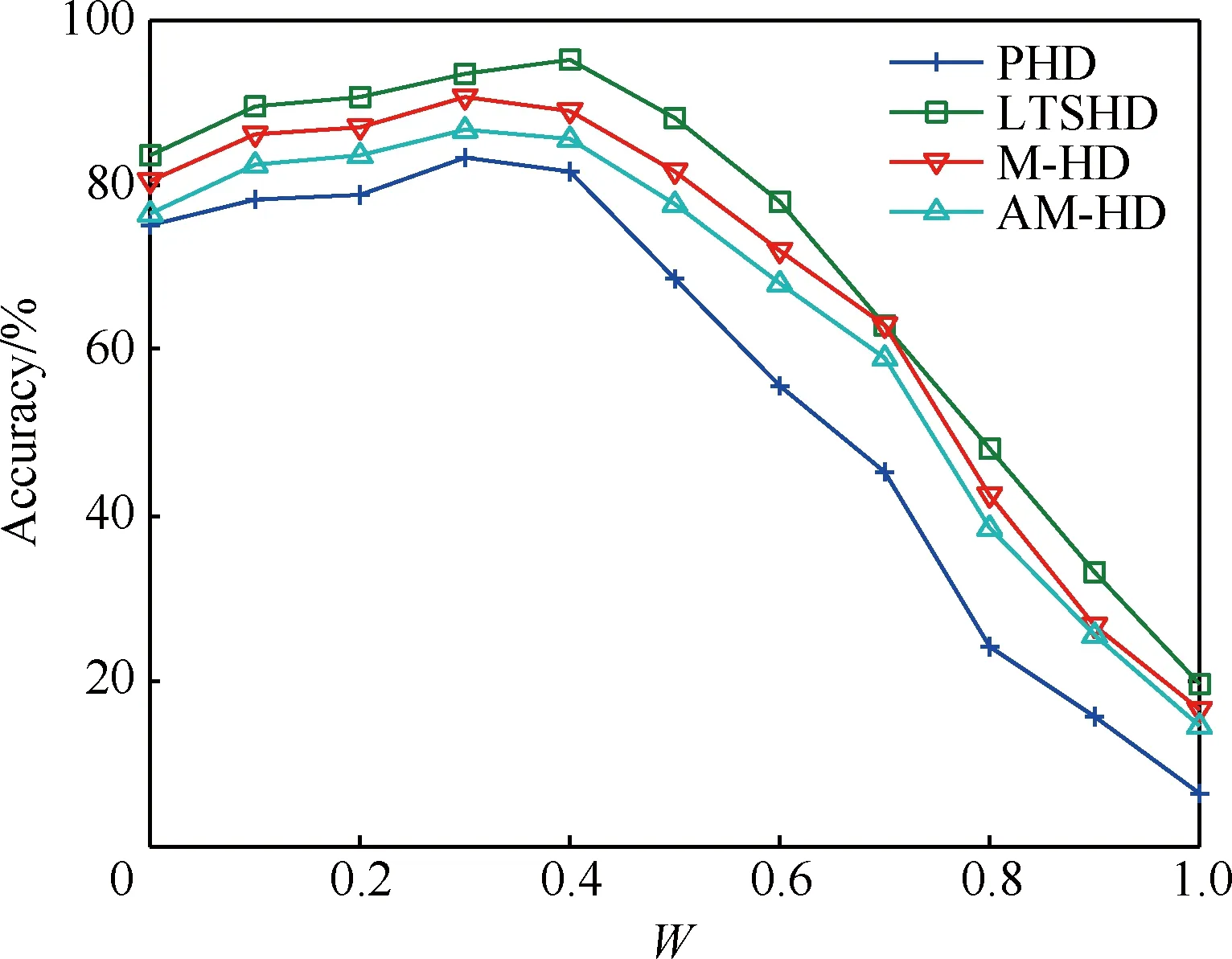
图6 不同融合权重对HD局部匹配正确率的影响Fig.6 Influence of different fusion weights on accuracy of HD local matching

图7 可见光图像、光照明暗图、山谷显著图、融合图像及其MLSEC边缘图像Fig.7 Vision maps,hillshade maps,valley maps,fusion maps and MLSEC edge images
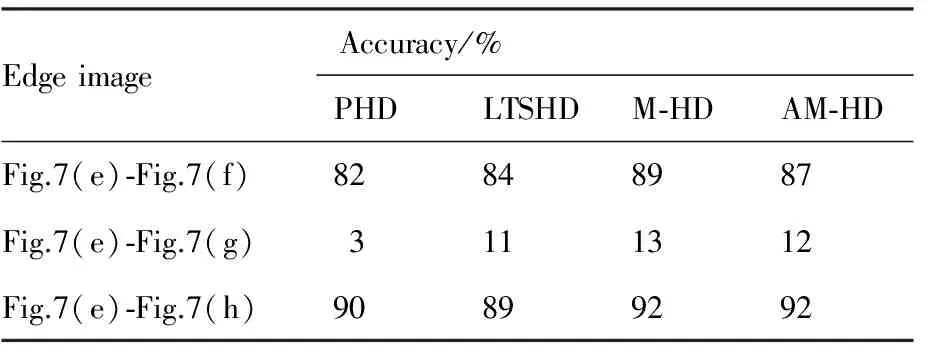
表2 图7边缘图像局部匹配结果Table 2 Local matching results of edge images in Fig.7
虽然融合图像与真实可见光图像在显著边缘上有较大的一致性,但由于不具备详尽的光照模型与地面反射系数,融合图像无法还原所有真实图像的细节,且由于实时图像噪声的影响,使得融合图像与真实图像在边缘检测阶段仍存在细节边缘的差异,这种差异减少了相近边缘点的数量和比例,并增大出格点的数量与比例,这两种因素都会降低Hausdorff匹配的正确率。
2 EHD边缘匹配算法
设P、Q为两个边缘图像的边缘点集为
传统Hausdorff双向距离的定义如式(10)所示。
H(P,Q)=max{h(P,Q),h(Q,P)}
(10)
式中:h(P,Q)为点集P到点集Q的单向HD用来衡量两个点集的相似程度,虽然目前已有的改进Hausdorff算法具有一定的克服出格点与处理差异点集的能力,但未从全局的角度考虑误匹配的问题。
形态学中的膨胀操作是将结构元素B平移后与原始点集E求交集,所获取的非空点集Y为膨胀操作构成的点集。膨胀操作的定义为
Y=B⊕E={y:B(y)∩E≠Ø}
(11)
首先对基本边缘点集P、Q进行膨胀操作得到PB、QB,其中PB=B⊕P,QB=B⊕Q,B为圆形结构元素,圆形半径为r。
其次分别求取新的边缘点集P′、Q′,其中P′=P∩QB,Q′=Q∩PB,求取新点集的目的是为了生成P、Q两幅边缘图像的邻近公共边缘,由此得到4个边缘点集各自的边缘点数量:NP、NQ为点集P、Q的边缘点数,NP′、NQ′为新点集P′、Q′的边缘点数。NP′、NQ′将P、Q边缘图像的细节差异排除在有效点集数量之外。
记DQ(px,py)为点集P中的一点p与点集Q所有点的最小欧式距离,即

(12)
定义EHD(Expansion HD)的单向HD距离为
(13)
式中:ρ为对称凸函数,使膨胀半径外的出格点衰减为距离值r,其表达式为
(14)
最终的EHD距离为
HEHD(P,Q)=
max{h(P,Q),h(Q,P)}·min{RP,RQ}
(15)
式中:RP与RQ为校正系数,表达式分别为
(16)

采用HD距离的图像匹配导航的问题描述为
(17)
式中:U为实时边缘图像;I为基准边缘图像;Vt为I中的遍历子图;t为子图V在I中的偏移位置;PU为U的边缘点集,QVi为Vi的边缘点集;Rθ,s为U与Vi之间的旋转尺度变化矩阵,表达式为
本文提出的融合图像基准图可在线制备,假设飞行器航向与高度数据较为精准,Rθ,s可近似为单位矩阵,式(17)简化为求取平移因子t的问题:
(18)
通过遍历计算每一个子图Vt与实时图U的EHD距离,寻找全局最小EHD的子图,确定出位置偏移t。由于细节边缘的差异对EHD距离产生干扰,可能出现多个子图Vt在式(15)的第1项有相同或相近值而导致错误匹配的发生,此时则依据最大的公共边缘点比率来进行权值调整,也即选取其中具有最小R值的子图,目的是为了更大程度减小公共边缘点比率高的HEHD值,因此式(15)的第2项是在RP与RQ中选取较小的一个。公共点集比例越大,给予的权值越小、公共点集比例越小,给予的权值越大,将具有相似HD匹配位置依据最大邻近点集的数量进行权值调整与区分,排除了细节边缘差异对HD的干扰,增强了正确匹配位置的区分度。
目前已有的HD方法只能给出经验参数来设置参与计算的边缘点比例,无法进行自适应调整,本文采用膨胀约束的方法给出动态调整HD的方法,以提高HD对细节边缘差异的鲁棒性。
3 鲁棒景象匹配方法
由以上分析可知,利用DEM数据与太阳光照信息以及山谷显著边缘生成的融合图像,可解决实时图与基准图在光照变化下显著边缘不一致的问题;利用形态学边缘点集约束的方法调整HD距离的系数,可解决融合图像与实时图像细节边缘差异带来的误匹配问题。
基于此,提出面向山地区域光照变化下的鲁棒景象匹配方法,该方法表述如下:
1) 飞行器在山区飞行过程中,依据当前指示的位置以及定位误差上限,划定一个较大的区域作为基准图范围。根据飞行参数中的时间、经纬度,可推算所处区域的太阳方位角与太阳高度角,采用光照模型对基准图范围内的DEM数据生成光照明暗图。
2) 对基准图范围的DEM数据计算其水流方向与水流汇集数据并生成山谷显著图像。
3) 融合光照明暗图与山谷显著图生成融合图像作为基准图。
4) 对基准图与实时获取的实测图像进行边缘提取。
5) 采用EHD边缘匹配方法对边缘图像进行匹配,实现飞行器定位并修正定位误差。
基于光照模型与水文信息的抗光照变化的基准图生成方法与图像匹配流程图如图8所示。
虽然惯导系统指示的经纬位置是存在误差的,但在漂移误差范围内对太阳高度角与太阳方位角计算所产生的影响非常小(北纬度33°~35°范围内,5 km的纬度误差在太阳方位角上产生的偏差仅有0.15°,在太阳高度角上产生的偏差最大仅有0.17°),反映到光照模型上带来的光照明暗误差微乎其微。
选择边缘提取算法时考虑两个方面:① 由于实时图与基准图来源不同,实时可见光图像具备更多的细节纹理信息,而基准可见光图在细节纹理信息上缺失,提取更多的细节边缘对匹配效果不会有更大的提升,并且Hausdorff边缘匹配的效率与点集数量相关;② 为了精确定位,尽量不采用大尺度的滤波器对原图像进行高斯平滑。CANNY算法在小尺度上可以得到精准的边缘信息,但带来干扰的细节信息较多;若采用大尺度的CANNY算法提取图像边缘,由于平滑作用,原图像的边缘位置产生较大的位置偏移,给匹配定位精度带来一定的损失。因此本文采用MLSEC算法提取图像边缘,该方法利用灰度图梯度向量场的方法计算图像中梯度方向汇集/相反的边缘,对图像中的显著边缘有良好的效果。
图8 基准图生成方法与图像匹配流程图Fig.8 Flowchart of reference image generation and image matching
4 景象匹配实验
本文采用Landsat8卫星图像作为实测图像数据,Landsat数据也为计算光照明暗图提供了拍摄时间、太阳高度角、太阳方位角等信息,DEM数据采用ASTER2DEM作为基准数据,并将DEM图像与可见光图像都规范至30 m的图像分辨率,选取秦岭山区典型山地地形作为仿真实验区域。实验平台采用i5-3230m 2.6 GHz CPU,内存8 G,操作系统为Windows 7的笔记本电脑。在生成光照明暗图时,由于DEM数据本身的不平滑造成在一些点位上的光照信息出现突变,会产生椒盐噪声点,为保证后续生成仿真图像的平滑性,采用中值滤波滤去光照明暗图的噪声点。生成融合图像时的融合权值W均设定为经验值0.4。MLCES边缘提取的滤波参数设置为4,在EHD方法中采用的膨胀结构为圆形,半径r设置为4。
为了验证在光照差异情况下采用融合图像作为基准图和采用固定时间图像作为基准图的匹配性能差异,选取秦岭同一地区不同时间的两幅可见光图像进行实验, 如图9所示, 图9(a)拍摄时间为2015/12/17,当地太阳高度角为30°,太阳方位角158°,图9(b)拍摄时间为2016/7/28,当地太阳高度角为64°,太阳方位角118°,图9(c)为依据图9(a)的太阳高度角与太阳方位角采用本文方法生成的融合图像,图9(d)、图9(e)、图9(f)分别是由图9(a)、图9(b)、图9(c)提取的MLSEC边缘图像。在317×317大小的图9(d)中随机截取100幅60×60大小边缘图像作为实时边缘图像,将图9(e)、图9(f)分别作为基准图,采用5种HD方法进行局部匹配,局部匹配结果如表3所示。由图可见,图9(d)、图9(e)在明暗边缘处的一致性较差,图9(d)、图9(f)在明暗边缘与河谷边缘处的一致性均较好;以图9(f)作为基准图的5种HD方法的匹配正确率均高于以图9(e)作为基准图的匹配正确率。验证了本文提出的基于光照模型与山谷信息的基准图制备方法在光照变化情况下的边缘特征与实时图一致性更高,匹配性能更好。
图9 同一区域不同时段可见光图、融合图像及其边缘图像Fig.9 Two vision maps at different time,a fusion map and their edge images
表3 图9边缘图像局部匹配结果Table 3 Local matching results of edge image in Fig.9
为了验证本文算法在实时图与基准图像在细节边缘上差异较大时的鲁棒性,选取10组秦岭典型山地区域的可见光图进行局部匹配实验,在317×317大小的可见光图中随机选取60×60大小的图像作为实时图,对实时图像施加不同的加性高斯噪声(强度分别为1%~5%),分别采用融合图像与光照明暗图作为基准图,采用5种HD方法对基准图与实时图像进行局部匹配,对匹配正确率Accuracy与定位误差PE两个指标进行蒙特卡罗实验统计。单次匹配结果的误差Error表示匹配位置(x,y)与图像实际位置(xT,yT)的欧式距离,定义匹配误差超过5个像素为错误匹配,小于等于5个像素单位为正确匹配,ACC为正确匹配次数与所有匹配次数的比率,PE为所有正确匹配实验的误差平均值。
(19)
(20)
(21)
限于篇幅,本文给出部分图像匹配的结果如表4、图10和图11所示,实验的统计结果如图12所示。由实验数据可得出以下结论:
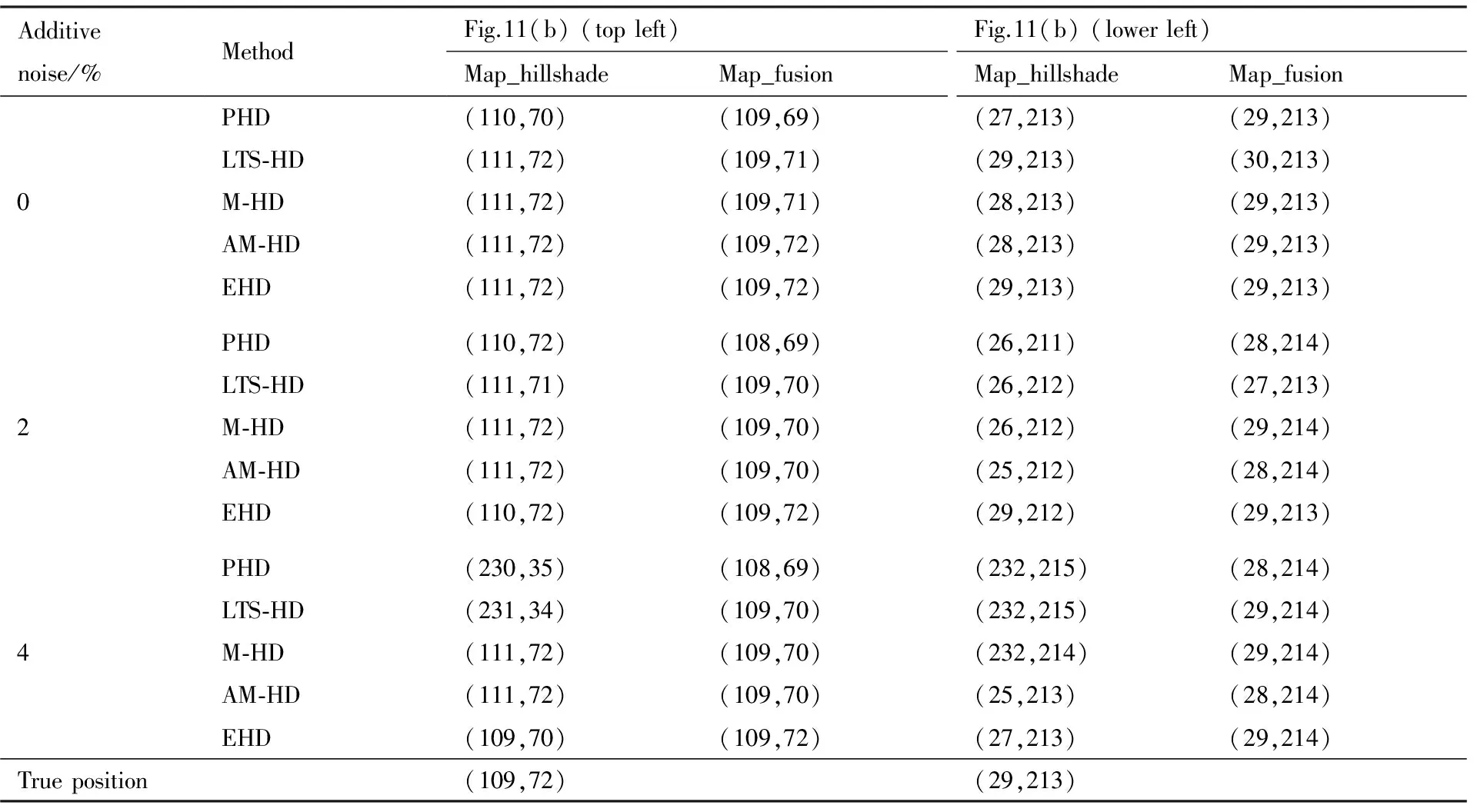
表4 不同基准图像下几种HD算法的匹配结果对比Table 4 Comparison of matching results of HD algorithms in different reference images

图10 两组典型地形的实验图像Fig.10 Two groups of experiments on typical terrain
1) 以Map_fusion(融合图像)为基准图像的匹配正确率均高于以Map_hillshade(光照明暗图)为基准图的匹配正确率,图10中展示了两组实时图(未加噪/加噪)在Map_fusion中正确匹配而在Map_hillshade中错误匹配的现象,验证了融合图像有效的引入了山谷的显著边缘信息,与真实可见光图像更具一致性。
2) 在不同的噪声环境下,对于两种不同的基准图像,EHD方法的匹配正确率均高于其他4种HD方法。实验结果表明EHD更有效的消除了出格点,提高了匹配面的峰值区分度,降低了误匹配率。
3) 随着噪声的增大,实时图与基准图的边缘差异增大,除EHD方法外的4种HD匹配方法的匹配正确率的指标下降显著,而EHD保持了较高的匹配正确率,说明EHD具有更好的鲁棒性。
4) 由于噪声对边缘位置带来影响,各种HD算法的定位精度都随噪声的增大而下降,以Map_fusion为基准图的匹配精度要高于以Map_hillshade为基准图的匹配精度,验证了融合图像引入了有效、一致的边缘信息。

图11 实测图像与仿真基准图边缘匹配结果Fig.11 Matching results between vision image and reference map
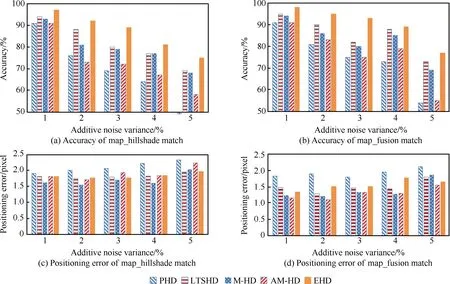
图12 不同方法匹配正确率与定位误差统计图Fig.12 Graphs of correct rate and positioning error of different methods
5) 5种Hausdorff方法的匹配运行时间如表5所示。由于AM-HD采用了梯度滤波器带来了更大的计算量,最为耗时;在边缘点数量较少的情况下PHD、LTS-HD效率优于EHD,但由于PHD与LTS-HD计算中采用了排序算法,在边缘点数量增大的情形下,相较EHD方法不具效率优势;而EHD在边缘点集数量较大的情形下效率仅次于M-HD。
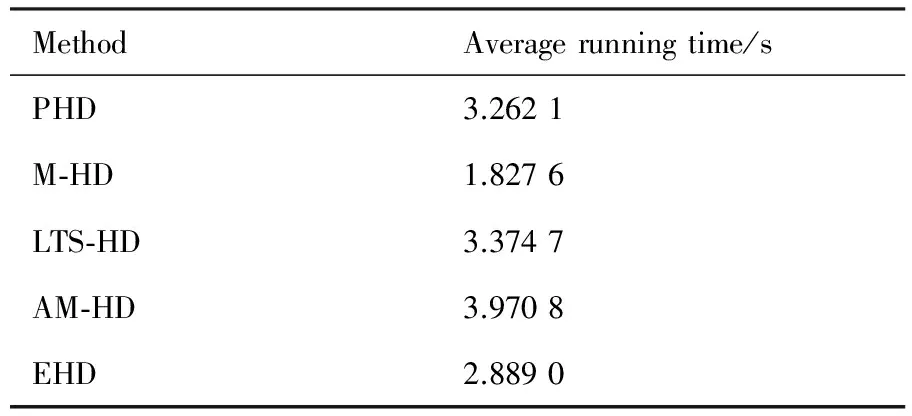
表5 不同HD方法的平均运行时间Table 5 Average running time of different HD methods
5 结 论
1) 采用光照模型与山谷信息生成的融合图像解决了不同光照环境引起的基准图与实时图在显著边缘处不致性的问题。
2) EHD方法克服了实时图与基准图由细节边缘差异引起的匹配正确率下降的问题,对噪声也具有良好的鲁棒性。并且EHD方法保持了良好的效率与精度,对解决异构图像边缘匹配的问题也具有通用性。
3) 为构造低成本高精度的无人机景象匹配自主导航方法提供了一种新颖的思路。
4) 本文算法主要针对能见度好,云量少的拍摄环境,当出现大面积云层遮挡以及雨雪天气的时,由于光源以及地表物体的反射率变得复杂,造成模型条件与实际情况差异大,使得匹配结果不佳,故算法仍存在一定的局限性,后续将进一步针对复杂光照条件的问题展开研究。
[1] ZHU Z S, SU A, LIU H B, et al. Vision navigation for aircrafts based on 3D reconstruction from real-time image sequences[J]. Science China Technological Sciences, 2015, 58(7): 1196-1208.
[2] MANCINI F, DUBBINI M, GATTELLI M, et al. Using unmanned aerial vehicles (UAV) for high-resolution reconstruction of topography:The structure from motion approach on coastal environments[J]. Remote Sensing, 2013, 5(12): 6880-6898.
[3] 崔平远, 冯军华, 朱圣英, 等. 基于三维地形匹配的月球软着陆导航方法研究[J]. 宇航学报, 2011, 32(3): 470-476.
CUI P Y, FENG J H, ZHU S Y, et al. 3D terrain feature matching based navigation for lunar soft landing[J]. Journal of Astronautics, 2011, 32(3): 470-476 (in Chinese).
[4] 李立春, 苑云, 李由, 等. 三维地形不变性特征描述及其在地形匹配中的应用[J]. 航空学报, 2009, 30(11): 2143-2148.
LI L C, YUAN Y, LI Y, et al. Invariant feature vector description for 3D terrain and its application to terrain contour matching[J]. Acta Aeronautica et Astronautica Sinica, 2009, 30(11): 2143-2148 (in Chinese).
[5] LI L C, YU Q F, SHANG Y, et al. A new navigation approach of terrain contour matching based on 3-D terrain reconstruction from onboard image sequence[J]. Science China Technological Sciences, 2010, 53(5): 1176-1183.
[6] 马旭, 程咏梅, 郝帅, 等. 面向未知区域深度测量的序列图像稠密点特征生成算法[J]. 航空学报, 2015, 36(2): 596-604.
MA X, CHENG Y M, HAO S, et al. Dense point feature generation algorithm based on monocular sequence images for depth measurement of unknown zone[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(2): 596-604 (in Chinese).
[7] SIM D G, PARK R H, KIM R C, et al. Integrated position estimation using aerial image sequences[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2002, 24(1): 1-18.
[8] 于秋则, 程辉, 柳健, 等. 基于改进Hausdorff 测度和遗传算法的SAR图像与光学图像匹配[J]. 宇航学报, 2006, 27(1): 130-134.
YU Q Z, CHENG H, LIU J, et al. Matching SAR image to optical image using modified Hausdorff distance and genetic algorithms[J]. Journal of Astronautics, 2006, 27(1): 130-134 (in Chinese).
[9] 陈天泽, 李燕. 一种高性能SAR图像边缘点特征匹配方法[J]. 自动化学报, 2013, 39(12): 2051-2063.
CHEN T Z, LI Y. A high performance edge point feature match method of SAR images[J]. Acta Automatica Sinica, 2013, 39(12): 2051-2063 (in Chinese).
[10] WANG T, CELIK K, SOMANI A K. Characterization of mountain drainage patterns for GPS-denied UAS navigation augmentation[J]. Machine Vision and Applications, 2016, 27(1): 87-101.
[11] WANG L, LIU H. An efficient method for identifying and filling surface depressions in digital elevation models for hydrologic analysis and modelling[J]. International Journal of Geographical Information Science, 2006, 20(2): 193-213.
[12] HUTTENLOCHER D P, KLANDERMAN G A, RUCKLIDGE W J. Comparing images using the Hausdorff distance[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1993, 15(9): 850-863.
[13] DUBUISSON M P, JAIN A K. A modified Hausdorff distance for object matching[C]∥Proceedings of 12th International Conference on Pattern Recognition, 1994: 566-568.
[14] SIM D G, KWON O K, PARK R H. Object matching algorithms using robust Hausdorff distance measures[J]. IEEE Transactions on Image Processing, 1999, 8(3): 425-429.
[15] KWON O K, KIM D, SUH J W. Accurate M-Hausdorff distance similarity combining distance orientation for matching multi-modal sensor images[J]. Pattern Recognition Letters, 2011, 32(7): 903-909.
[16] LOPEZ A M, LLORET D, SERRAT J, et al. Multilocal creaseness based on the level-set extrinsic curvature[J]. Computer Vision and Image Understanding, 2000, 77(2): 111-144.
[17] CANNY J. A computational approach to edge detection[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1986(6): 679-698.
[18] CHEN H F, BELHUMEUR P N, JACOBS D W. In search of illumination invariants[C]∥IEEE Conference on Computer Vision and Pattern Recognition,2000: 254-261.
[19] HOM B. Robot vision[M]. Beijing: China Youth Press, 2014: 246-247.
[20] BONHAM-CARTER G F. Geographic information systems for geoscientists: Modelling with GIS[M]. Amsterdam: Elsevier, 2014: 295-297.
[21] JENSON S K, DOMINGUE J O. Extracting topographic structure from digital elevation data for geographic information system analysis[J]. Photogrammetric Engineering and Remote Sensing, 1988,54(11): 1593-1600.
Arobustscenematchingmethodformountainousregionswithilluminationvariation
WANGHuaxia1,2,*,CHENGYongmei1,LIUNan1
1.CollegeofAutomation,NorthwesternPolytechnicalUniversity,Xi’an710072,China2.CollegeofElectronicandInformationEngineering,TaiyuanUniversityofScienceandTechnology,Taiyuan030024,China
Thispaperpresentsarobustscenematchingnavigationmethodformountainousregionswithilluminationvariation.Inordertosolvetheproblemoftheinconsistencybetweenthereferencemapandtherealmapcausedbydifferentlightingconditionsinmountainousareas,thereferenceimageisobtainedbyfusingthehillshademap,generatedfromelevationdatausingilluminationmodel,andthevalleysaliencymap,generatedfromwaterflowdatacollectedbyDigitalElevationModel(DEM).Toavoidthemismatchcausedbythedifferenceofedgebetweenthereferenceandtherealmaps,aHausdorffdistanceedgematchingalgorithmbasedonmorphologicalconstraintsisproposed.TheexperimentalresultsofLANDSATimageandASTERDEMdatashowthattheproposedmethodhashighaccuracyandgoodrobustness.
scenematchingnavigation;illuminationmodel;significantedge;Hausdorffdistance;imagefusion
2017-01-04;Revised2017-02-06;Accepted2017-03-13;Publishedonline2017-03-201514
URL:http://hkxb.buaa.edu.cn/CN/html/20171019.html
s:NationalNaturalScienceFoundationofChina(61603364);Xi’anScienceandTechnologyProject(CXY1436(9),CXY1350(2))
.E-mailwanghx_sam@163.com
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
10.7527/S1000-6893.2017.321101
V249.32
A
1000-6893(2017)10-321101-13
2017-01-04;退修日期2017-02-06;录用日期2017-03-13;< class="emphasis_bold">网络出版时间
时间:2017-03-201514
http://hkxb.buaa.edu.cn/CN/html/20171019.html
国家自然科学基金(61603364); 西安市科技计划项目(CXY1436(9),CXY1350(2)).
*
.E-mailwanghx_sam@163.com
王华夏,程咏梅,刘楠.面向山地区域光照变化下的鲁棒景象匹配方法J. 航空学报,2017,38(10):321101.WANGHX,CHENGYM,LIUN.ArobustscenematchingmethodformountainousregionswithilluminationvariationJ.ActaAeronauticaetAstronauticaSinica,2017,38(10):321101.
(责任编辑:苏磊)
猜你喜欢
知音·上半月(2023年2期)2023-06-06 01:49:56
中华养生保健(2020年7期)2020-11-16 01:14:26
语数外学习·初中版(2020年9期)2020-09-10 07:22:44
家教世界·创新阅读(2016年11期)2016-12-27 18:49:15
天津护理(2016年3期)2016-12-01 05:40:01
故事会(2016年15期)2016-08-23 13:48:41
奥秘(2016年7期)2016-07-30 17:24:27
公民与法治(2016年19期)2016-05-17 04:18:15
小猕猴智力画刊(2016年8期)2016-05-14 09:21:41
读者·校园版(2015年7期)2015-05-14 13:11:40