低速风洞带动力模型自由飞试验
2017-11-16 02:11岑飞聂博文刘志涛孙海生李清
航空学报 2017年10期
岑飞,聂博文,刘志涛,孙海生,李清
1.清华大学 自动化系,北京 100084 2.中国空气动力研究与发展中心,绵阳 621000
低速风洞带动力模型自由飞试验
岑飞1,*,聂博文2,刘志涛2,孙海生2,李清1
1.清华大学 自动化系,北京 100084 2.中国空气动力研究与发展中心,绵阳 621000
为在风洞中模拟飞行器六自由度飞行的物理过程,获取飞行器流动/运动/控制耦合特性,对低速风洞带动力模型自由飞试验技术进行了研究。基于相似准则,在大型低速风洞建立了试验系统,利用纵向静不稳定的动力学相似缩比模型飞机,经过飞行控制律闭环控制增稳后,开展稳态飞行、施加标准激励验证飞行、控制律参数调整验证飞行、大迎角飞行等自由飞试验,并将试验结果与原型机飞行仿真结果进行了对比研究。结果表明,基于相似准则建立的低速风洞带动力模型自由飞试验系统,能够有效模拟飞机闭环控制飞行过程,试验结果准确反映原型机的稳定与控制特性。低速风洞带动力模型自由飞试验验证了原型机的飞行控制律,预测了其大迎角失速/偏离特性,形成了飞行器气动/飞行力学/控制一体化风洞试验研究能力。
风洞;飞行试验;飞行品质;动稳定性;飞行控制
现代飞行器在设计方法层面,更加突出多学科优化[1],特别是飞行控制与飞行器总体设计的关系愈加紧密,在设计初期就需要评估飞行控制对飞行器总体性能的影响,因此传统设计方法已经不能很好地适用于现代先进飞行器的研制。在系统实现层面,往往面临气动、飞行力学与控制的高度耦合,仅采用传统的气动力风洞试验、数学建模到控制律设计与验证的流程已经不能完整反映飞行器的气动特性、动力学特性和飞行控制特性。因此,需要研究适合于多学科交叉设计与分析的流动/运动/控制一体化手段,深入探索具有复杂动力学特性的先进飞行器试验、建模与控制问题[2]。
就现有的研究手段而言,常规的静、动态风洞试验可以研究和分析飞行器的气动特性及飞行器本体的飞行动力学特征,但无法验证与评估加入飞行控制后闭环系统的综合特性;而大气模型自由飞及原型机试飞等飞行试验手段,可以在飞行器研制中后期有效地进行飞行控制系统的验证与确认[3-4],但在飞行器研制初期,对气动、飞行与控制特性掌握得不够充分的情况下,或者面对新型气动布局、新的控制技术等既无相关工程经验,又难以进行精确数学建模和飞行仿真研究时,直接进行该类试验验证面临风险高、周期长等问题。为弥补上述不足,诞生了低速风洞带动力模型自由飞试验概念[5]。试验中,带动力的缩比模型飞机(包含机载传感器和舵机)在大型低速风洞试验段内六自由度飞行,与地面的飞控计算机、飞行操纵系统等一起,组成与原型机空中飞行运动自由度相同的试验环境,研究飞机的飞行动力学与控制特性。可见,该技术结合了风洞试验和飞行试验的优势,有利于在飞行器研制初期开展气动/飞行/控制一体化研究,对于推进新型先进飞行器研制和新技术工程应用具有重要意义。
美国NASA Langley研究中心(Langley Research Center,LaRC)最早在大型开口式低速风洞(30 ft×60 ft全尺寸低速风洞和14 ft×22 ft亚声速风洞,1 ft=340.8 mm)中发展风洞模型自由飞试验技术[6],先后用于进行变后掠翼布局飞机飞行控制验证[7]、大迎角稳定与控制特性研究[8-9]、推力矢量控制技术发展[10-11]、飞翼布局飞机飞行控制律优化[12]等,推进了新型布局飞行器研制和新技术验证与应用。该试验技术发展难度大,因此从试验技术早期发展至今,相关应用主要集中在获得有关飞行器动稳定性和大迎角控制特性的定性评估数据方面。在国内,中国空气动力研究与发展中心(China Aerodynamics Research and Development Center,CARDC)也开展了相关技术研究,分析了其关键技术及应用前景[13-14]。
本文介绍了在CARDC大型闭口式低速风洞中设计的试验平台,解决试验相似准则与模拟方法、飞行操纵技术、试验设计与结果评估等问题,实现纵向静不稳定飞机经过飞行控制系统控制增稳后,在风洞闭口试验段内稳定可控飞行。在实现定性评估基础上,开展了与原型机响应特性的相关性研究,分析将试验技术应用进一步拓展到定量评估的可行性,指出了进行定量分析应注意的问题和试验技术改进方向,为试验技术的工程化应用奠定基础,为现代先进飞行器研制提供一个可靠、经济、高效的气动/飞行/控制一体化试验验证手段。
1 相似准则与模拟方法
1.1 相似准则
相似准则是开展低速风洞模型自由飞试验的理论基础和基本依据,为了使结果反映全尺寸飞机的特性,试验必须满足一定的相似准则。从飞机六自由度运动方程和流场流动方程推导,在模型与原型机几何外形相似、运动自由度相同(均为六自由度运动)的条件下,运动相似和流动相似参数分别为[15]
(1)
(2)
式中:α为迎角;β为侧滑角;φ和θ分别为滚转角和俯仰角;V为飞行速度;ω为角速度;m、J和l分别为飞机质量、转动惯量和特征长度;T为发动机推力;g为重力加速度;a为声速;ρ和μ分别为大气密度和动力黏性系数;下标“f”表示原型机参数,下标“m”表示模型参数。
低速风洞模型自由飞试验中,模型运动自由度完全释放,与实际飞行一致,对于该类与重力作用有关的稳定与控制特性研究试验,弗劳德数Fr必须满足相似准则;试验不涉及快速机动等非定常过程,不模拟斯特劳哈尔数Sr;在低速范围内,忽略马赫数Ma影响;不可能同时模拟雷诺数Re和Fr[16],在Fr必须模拟的情况下,无法模拟Re,需在试验结果中注意和分析Re的影响[17]。
综上,低速风洞模型自由飞试验中,除了几何相似,模拟的相似准则包括Fr相同、质量相似、转动惯量相似和推力相似,满足这些相似准则条件下的参数相似关系(缩比模型/全尺寸原型机)如表1所示。在1.2~1.6节中,将分析试验中如何模拟与实现该相似关系。
1.2 模型设计
模型是低速风洞自由飞试验相似模拟的重要部分,涉及3个重要的相似准则:几何相似、质量相似和转动惯量相似。从表1中可以看出,对于几何相似,最重要的是确定合适的模型比例参数N。N的确定需综合考虑以下因素:①模型内部空间可以容纳相关机载设备和动力系统; ②模型足以实现质量、转动惯量调节以满足相似准则要求;③分析Re的影响,将模型比例确定在Re影响不显著的范围;④模型最大展长不超过风洞试验段宽度的1/5。而质量相似和转动惯量相似,则对模型设计提出很高要求。为此,在设计方法上,采用现代计算机辅助建模软件进行数字一体化设计。设计时合理规划机载设备安装位置,进行虚拟装配,并在计算模型质量、惯量时计入机载设备的影响,降低后期试验模型质量、转动惯量调节的难度。
注:σ、υ分别表示模拟的原型机飞行高度与模型自由飞风洞试验段的空气密度、动力黏性系数之比。
1.3 飞行参数测量
飞行参数测量技术是低速风洞模型自由飞试验的关键技术,需要实时测量的运动参数包括:迎角、侧滑角、俯仰角、滚转角、偏航角、三轴角速度和线加速度等。在风洞模型自由飞试验中,主要研究经过飞行控制增稳后的飞机闭环特性,因此,一般而言,作为反馈量进入飞行控制系统的传感器测量参数是迎角/侧滑角和三轴角速度,三轴线加速度和姿态角等仅用于数据记录和分析。
同理,飞行参数测量系统也需满足相似关系。从表1中可以看出,相似准则对于飞行参数测量的要求主要体现在时间尺度上:缩比模型飞机与全尺寸原型机时间尺度比值为N0.5,模型响应比原型机快。以表征传感器动态特性最常用的二阶环节或一阶惯性环节为例,经推导可得[18],模型和原型机的传感器特征参数比值为
(3)
式中:ζ为阻尼比;t为时间。
本期试验中,迎角α和侧滑角β使用风标式传感器测量,俯仰角θ、滚转角φ和偏航角ψ使用航姿参考系统(Attitude and Heading Reference System,AHRS)测量,三轴角速度p、q、r和线加速度ax、ay、az用惯性测量单元(IMU)测量。试验所用测量传感器性能指标如表3所示。可以看出,由于模型缩比,相似关系对传感器带宽要求极高,同时,模型内部空间有限,在体积、重量约束下,传感器性能难以完全满足相似要求,其对试验结果的影响将在第3节进行讨论。

表3 传感器主要性能参数Table 3 Main performance parameters of sensors
1.4 发动机动力模拟
风洞模型自由飞试验相似准则中,对发动机动力模拟要求是推重比相似。根据不同的试验类型,有两种动力模拟解决方案:一是采用高压空气从模型尾部喷出,模拟发动机推力;二是采用微型涡喷或涵道风扇发动机。
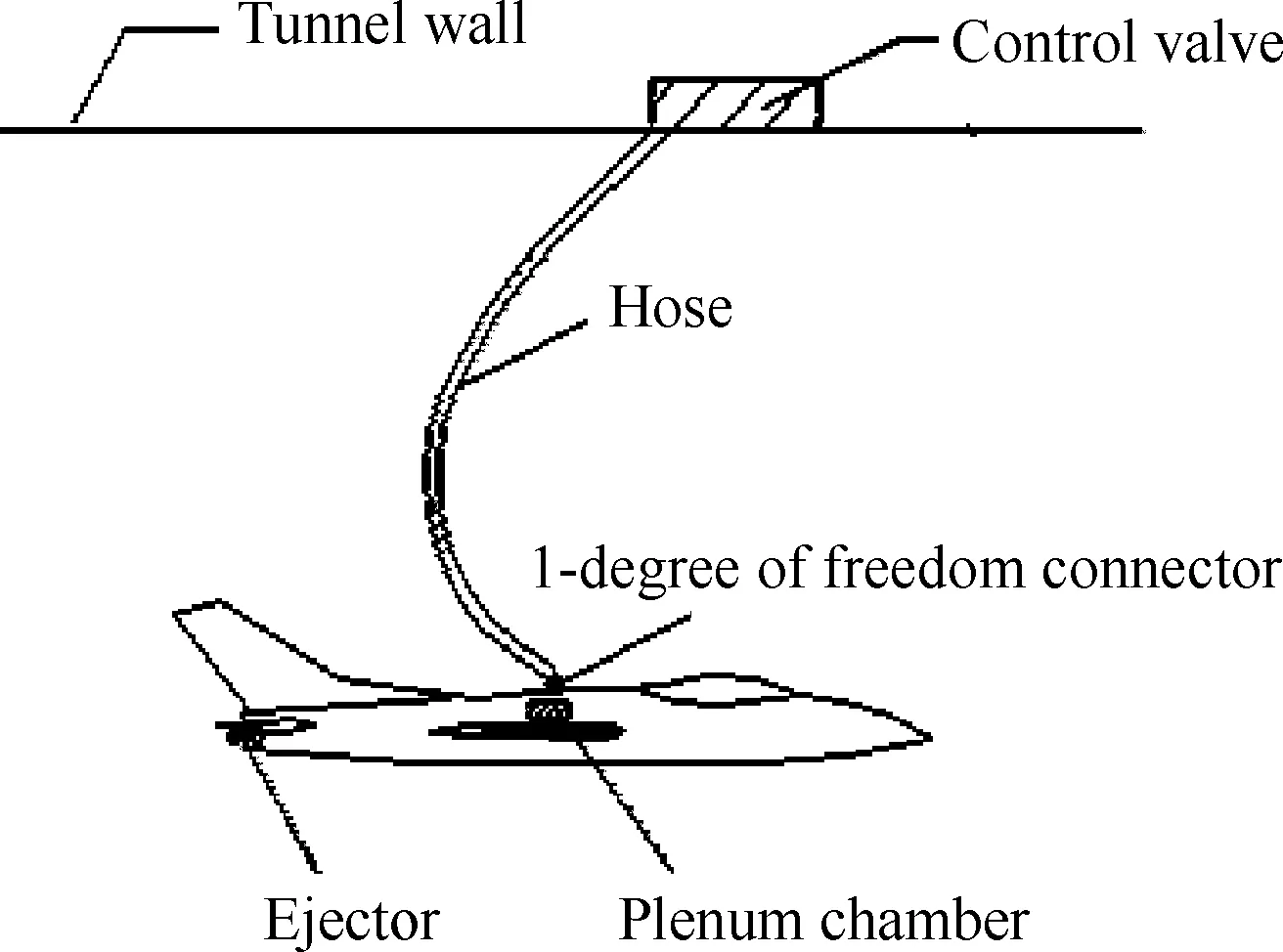
图1 发动机动力模拟系统示意图Fig.1 Schematic of engine thrust simulation system
本期试验中,根据飞机布局特点和模型质量、转动惯量模拟要求,研究和实现了基于高压空气喷射提供推力的模拟方式,如图1所示。为了减小模型外部通气管路对模型运动的约束以及气动特性的影响,作了以下优化:①通气管路采用轻质、柔软的特制软管;②对尾喷管的喷嘴截面进行CFD计算与优化,使得满足最大推力要求前提下减小通气管路直径;③通气管路与模型之间通过一个单自由度回转接头连接,连接位置位于模型重心。推力大小的控制通过一个流量控制阀调节高压空气流量来实现。经过上述方法,在通气管路直径为15.0 mm,高压空气入口压力为1.0 MPa的情况下,经过试验测试,推力静态控制精度达到1.0 N,控制带宽达到1.0 Hz,推力响应等效时延小于1.0 s,最大推力达到100.0 N(即最大推重比为0.5),满足本期试验飞行包线内的推重比相似要求。
1.5 飞行控制
飞行控制作为风洞模型自由飞试验平台的核心,与原型机的飞控系统相似是保证试验结果准确反映原型机稳定与控制特性的关键。根据试验相似准则,结合1.3节中关于典型二阶环节和一阶惯性环节的分析,可得飞控系统的参数相似关系如表4所示,即在飞行控制律结构与原型机一致的前提下,控制律中的反馈增益、动态环节的特征参数、系统采样频率以及组成飞控系统主要部件的静动态特性(如舵机以及1.3节中所述的机载传感器)等满足相似关系[18-20]。
本期试验中,控制律反馈增益、动态环节的特征参数、系统采样频率等满足相似关系,与原型机相比未能实现参数相似的是传感器和舵机,传感器参数模拟情况如1.3节表3所述,舵机参数模拟情况如表5所示,其对飞机响应的影响在试验结果中进行分析。
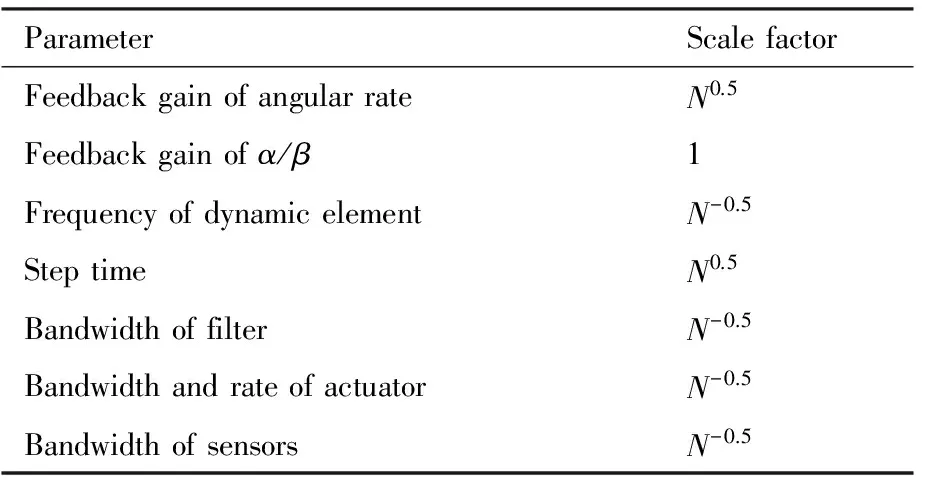
表4 飞控系统参数相似Table 4 Similitude parameters for flight control system
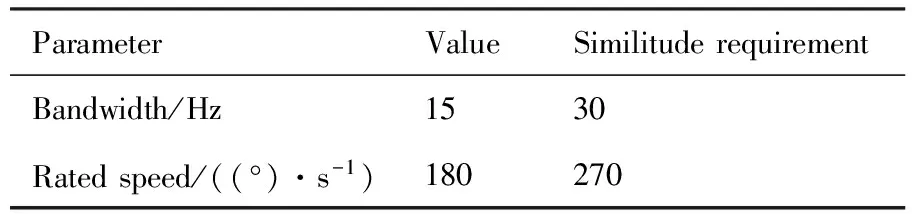
表5 舵机主要性能参数Table 5 Main performance parameters of actuators
1.6 飞行操纵
飞行操纵是低速风洞模型自由飞试验的难点。与全尺寸原型机飞行操纵不同,风洞模型自由飞试验系统的飞行操纵需要分解成俯仰操纵、偏航/滚转操纵和推力操纵3个部分,由3名操纵员协作完成[13]。将操纵任务分解为3人协作操纵,一方面可以减轻飞行操纵负担,另一方面也更有利于操纵员对飞行稳定性和操纵性进行有效评估。LaRC和CARDC的研究实践都证明[17,21],3人操纵模式可以有效补偿因模型缩比带来的各种影响,使操纵员能够进行有效评估。
为了进一步获得一些定量评估结果,本期试验中,在通过驾驶员操纵使模型处于稳态平飞基础上,进行专门的飞行操纵输入设计,在驾驶员操纵指令基础上叠加典型标准激励,以激发出表征飞行稳定与控制特性的运动模态,便于辨识出典型特征参数。常用的飞行操纵输入信号有以下几种形式:阶跃信号、偶极方波、“3211”多级方波、扫频信号等。根据风洞模型自由飞试验特点,本期试验主要研究叠加偶极方波激励下模型与原型机的响应特性。
2 试验系统与流程
2.1 试验系统
在中国空气动力研究与发展中心的FL-13风洞建立了试验系统。该风洞是一座开路式、闭口串行双试验段大型低速风洞(图2),其中,第1试验段尺寸长25.0 m,宽12.0 m,高16.0 m,有效截面积为189.1 m2,常用风速范围为5.0~21.0 m/s;第2试验段尺寸长15.0 m,宽8.0 m,高6.0 m,有效截面积为47.4 m2,常用风速范围为15.0~85.0 m/s。通常情况下,风洞模型自由飞试验风速范围为15.0~35.0 m/s,模型翼展范围为1.5~2.0 m,综合考虑试验风速范围和模型飞行运动空间要求,选择第2试验段建立模型自由飞试验装置。
如图3所示,试验系统包括飞机动力相似缩比模型、模型机载姿态测量系统、舵面运动驱动系统、发动机动力模拟系统、飞行控制系统、飞行操纵系统、风洞运行系统、安全防护与监控系统。试验中模型无支撑装置、六自由度运动不受约束,高压空气从模型尾喷口喷出为模型提供动力,地面站包含飞行控制系统和飞行操纵系统,驾驶员在地面操控实现飞机模型在风洞试验段内六自由度飞行,从而研究飞机的气动、飞行力学和飞行控制特性。试验系统的核心是地面飞控计算机,其接收机载姿态测量系统反馈信号、飞行操纵员操控信号,实时运行满足相似要求的缩比模型飞行控制律,发送舵面控制指令和推力控制指令给执行机构(舵机、发动机动力模拟系统),并完成数据在线显示与存储等功能,实现试验系统的综合集成,从而在大型低速风洞中形成一个驾驶员在环的飞行测试环境。
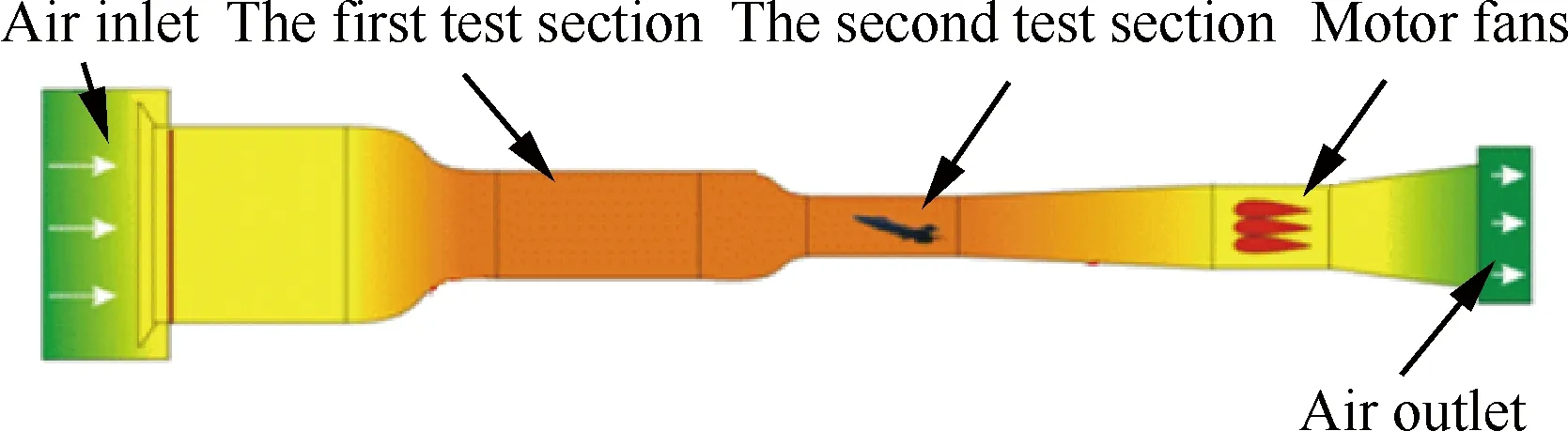
图2 CARDC FL-13低速风洞示意图Fig.2 Sketch of CARDC FL-13 low speed wind tunnel
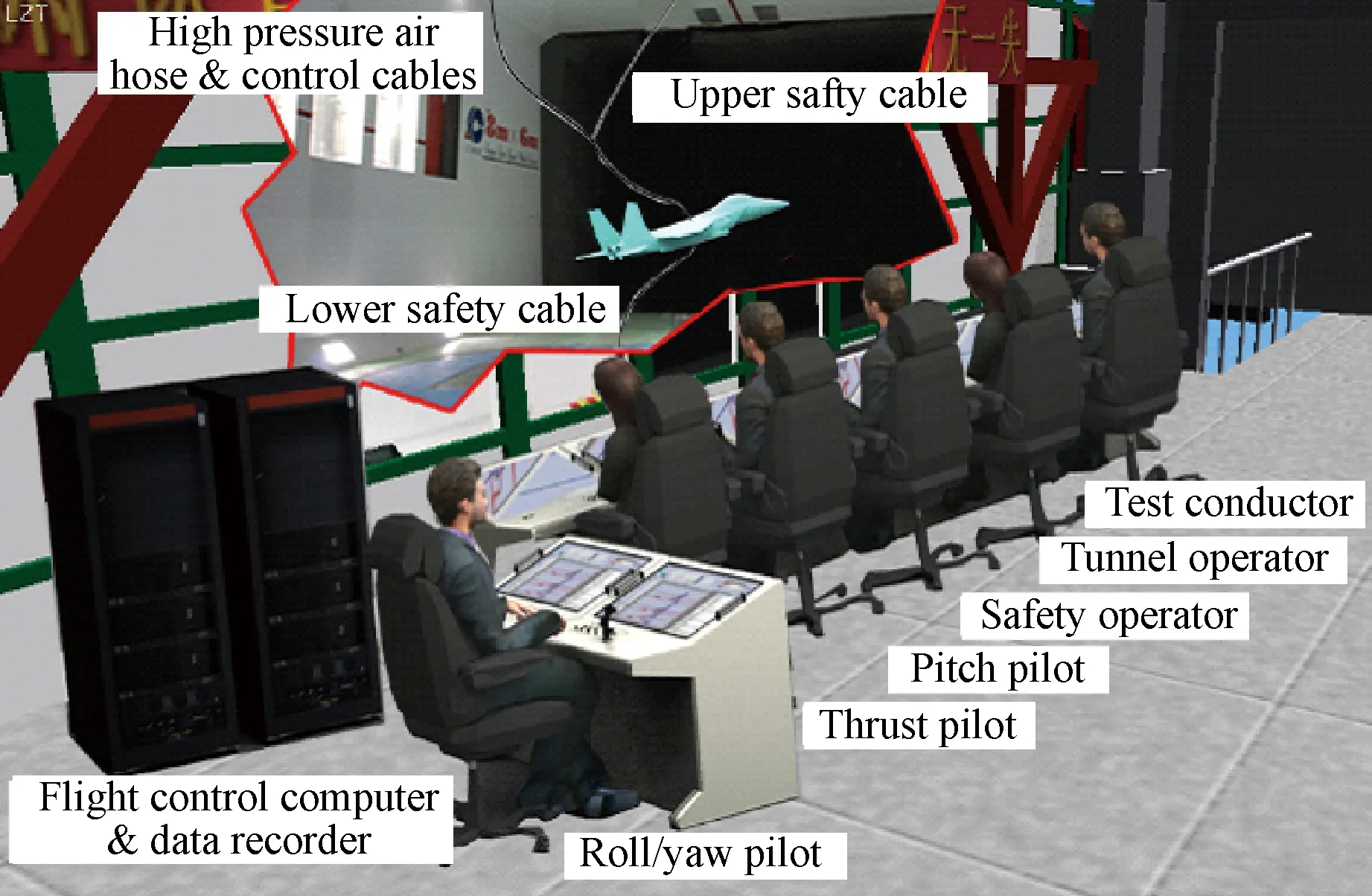
图3 CARDC FL-13风洞自由飞试验系统Fig.3 Free-flight test facility in CARDC FL-13 wind tunnel
2.2 试验流程
试验流程如下:①风洞未起风时,模型由上安全绳悬挂,由于悬挂点位于模型重心位置,模型可以基本保持水平姿态(由于采用回转接头连接,飞机机头可在水平面内左右自由摆动);②在起风阶段,风速从零慢慢升到目标试验风速过程中,安全操纵员拉紧下安全绳,使模型线位移固定;③在低风速时,风标测量结果不准确,切断飞行控制律中的迎角/侧滑角反馈回路,在风速大于一定阈值(如V=10.0 m/s)后才接通风标信号;④达到目标试验风速后,慢慢松开下安全绳,同时推力操纵员逐渐加大油门至所需配平推力,俯仰操纵员操纵迎角至配平迎角,滚转/偏航操纵员根据模型位置进行适当操控,保持模型在试验段中心区域1g平飞;⑤进行相应科目的飞行试验;⑥完成一个试验工况后,改变试验风速,研究其他迎角的飞行稳定与控制特性;⑦试验结束则拉紧安全绳,风洞停风,进行数据结果的分析和评估。根据试验测试任务以及飞行操纵员工作负担,一般情况下,每次测试试验约持续10~15 min。
3 典型试验结果与分析
3.1 试验条件
为了研究基于上述试验相似准则及模拟条件下试验系统应用于对原型机飞行稳定性与控制性能进行预测及验证的可行性,开展验证性风洞模型自由飞试验,试验条件如表6所示。在试验飞行包线范围内,飞机本体纵向静不稳定,通过闭环飞行控制实现控制增稳。
需要特别说明的是,下文用于进行对比的原型机飞行仿真中,其气动力数学模型基于完整的静态和动态风洞试验数据库建立,在本期验证性试验涉及的飞行包线范围内,认为该飞行仿真结果代表了原型机的真实特性是合理的。因此,通过与该飞行仿真结果对比,进行缩比模型风洞自由飞试验结果与原型机特性的相关性验证。
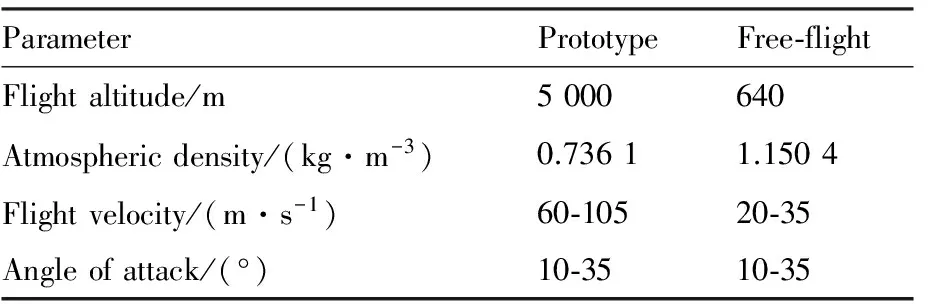
表6 试验条件Table 6 Test conditions
3.2 稳态飞行试验
开展不同飞行速度下的1g平飞试验,定性评估飞机在不同迎角下的飞行稳定性和操纵性。
表7和表8中给出了不同飞行速度下的lg平飞试验结果和原型机配平计算结果的对比。可以看出,在不同飞行速度下,试验配平迎角αtrim与原型机配平迎角一致;而升降舵配平偏角δe存在约4°的角度偏差。分析认为,该差异主要源于动力系统中高压通气软管的影响。具体而言,从配平飞行迎角相符可以看出,飞机进入1g平飞状态后,高压通气软管处于松弛状态,对模型线位移无约束,对模型气动力影响可忽略;而对俯仰力矩存在一个常值力矩干扰。常值干扰力矩产生原理如图4所示。以1g平飞速度27.0 m/s为例,经风洞试验标定,连接点受力Fdraw-back=25.0 N,连接点与重心之间的Z向距离Δz=0.1 m,故软管引起附加抬头力矩约为2.5 N·m,抵消该抬头力矩,升降舵需下偏约4.2°,与试验结果中升降舵角度偏差吻合。
为了进一步比较稳态飞行条件下风洞自由飞试验结果与原型机响应之间的相关性,在相同飞行操纵输入下,进行飞机响应特性对比(对于原型机飞行仿真结果,在时间尺度上经过了相似性转换,以便在相同时间尺度上进行比较,下同)。以平飞速度V=25 m/s时飞机横航向响应为例,图5给出了主要飞行参数的对比曲线。可以看出:对于横航向而言,在相同的飞行操纵输入下,两者的舵面偏转角度与飞机响应均保持一致,自由飞试验结果准确反映了原型机横航向稳定与控制特性。而对于纵向而言,1g平飞试验中,俯仰操纵员松杆,飞机俯仰姿态保持。其他迎角下的稳态飞行试验结果与此类似。可见,在1g平飞试验中,风洞自由飞试验结果准确反映了原型机特性;试验相似准则中提到的传感器和舵机在动态性能参数上的差异未影响飞机稳态飞行响应结果的相似性。
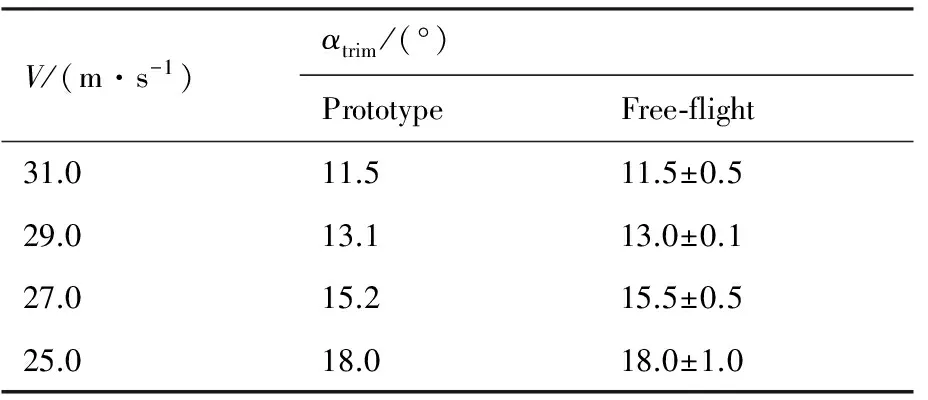
表7 配平迎角结果对比Table 7 Results comparison of trim angle of attack
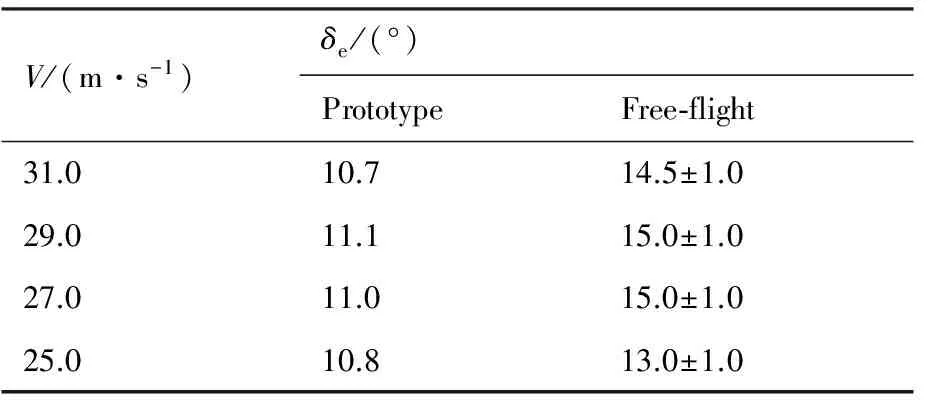
表8 配平升降舵偏角结果对比Table 8 Results comparison of trim elevator deflection
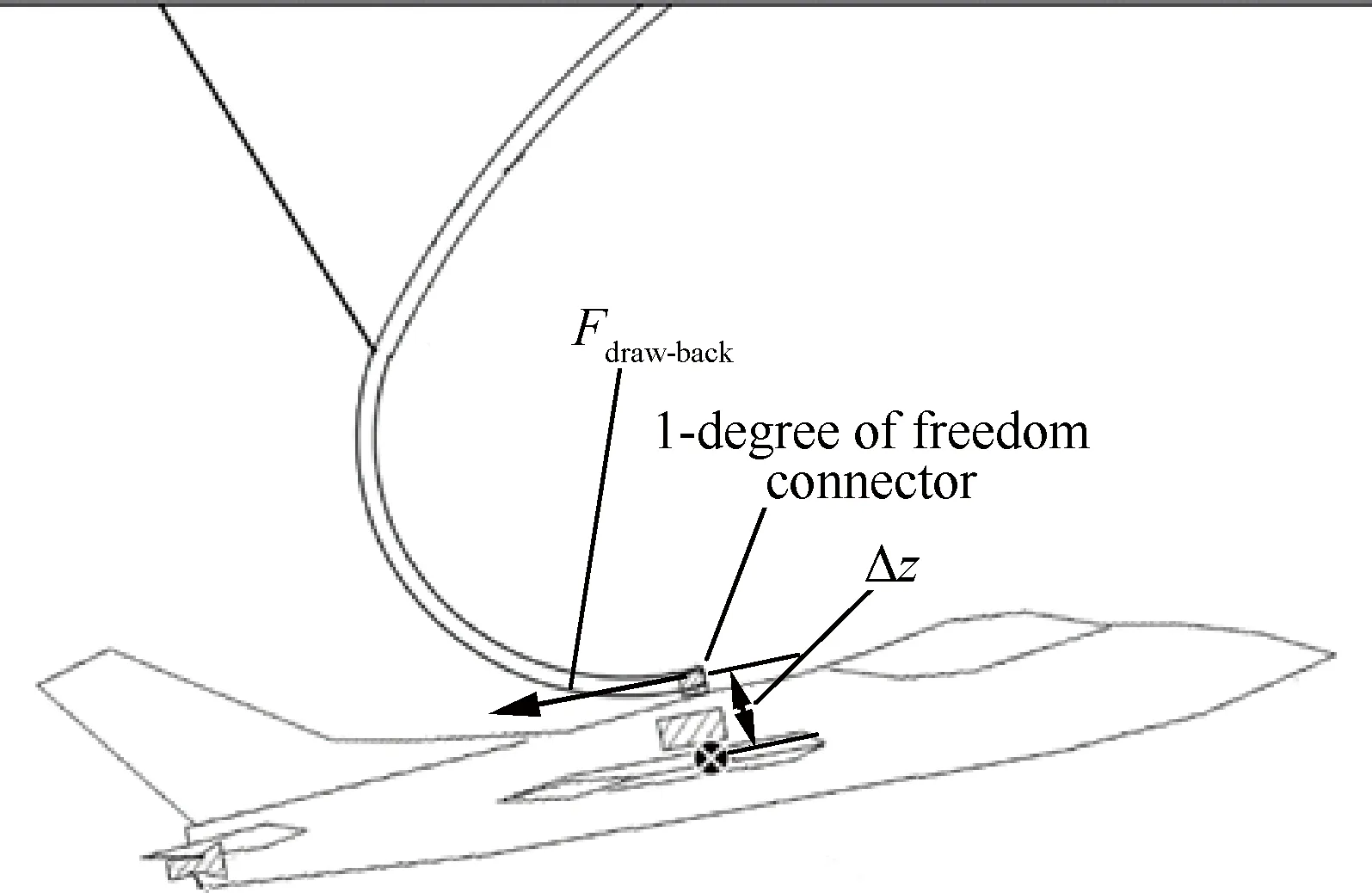
图4 高压通气软管产生的常值俯仰力矩干扰原理Fig.4 Schematic diagram of constant pitch moment produced by high-pressure air hose
3.3 标准激励测试试验
一般情况下,风洞模型自由飞试验主要用于飞行器设计初期进行动稳定性与大迎角控制特性的定性评估[17]。本研究中,为了进一步在定量意义上获得风洞模型自由飞试验结果与原型机响应的相关性,在1g平飞基础上开展叠加标准激励试验,标准激励包括对偶方波激励、脉冲激励等。
以对偶方波激励为例,图6和图7给出了αtrim=15.5°时,纵向、横向分别施加对偶方波激励下风洞模型自由飞试验结果与原型机仿真结果对比。综合第1节所述,本期试验关键参数的模拟情况如表9所示,“Prototype simulation”表示完全满足相似关系时的关键参数值(该仿真结果代表了经过相似性转换的原型机特性);“Free-flight test” 表示本期试验系统实际实现的参数模拟值。为便于分析相似参数的影响,图中给出了按照风洞模型自由飞实际满足的相似条件进行仿真的结果(Free-flight simulation)。
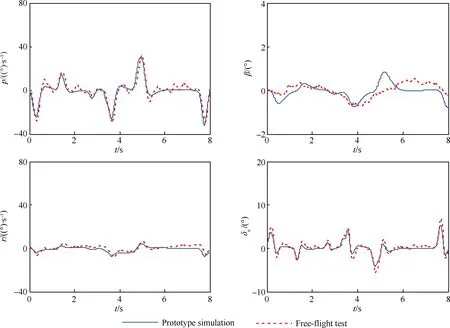
图5 稳态飞行风洞模型自由飞试验与原型机仿真横航向响应对比(αtrim=15.5°)Fig.5 Comparison of lateral response of free-flight wind tunnel test and prototype aircraft simulation in level flight(αtrim=15.5°)
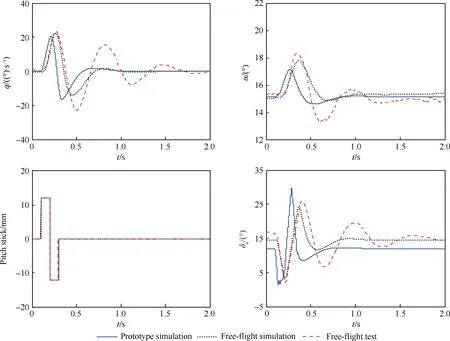
图6 对偶方波激励下风洞自由飞试验与原型机仿真纵向响应对比(αtrim=15.5°)Fig.6 Comparison of longitudinal response of free-flight wind tunnel test and prototype aircraft simulation with dual square wave excitation(αtrim=15.5°)
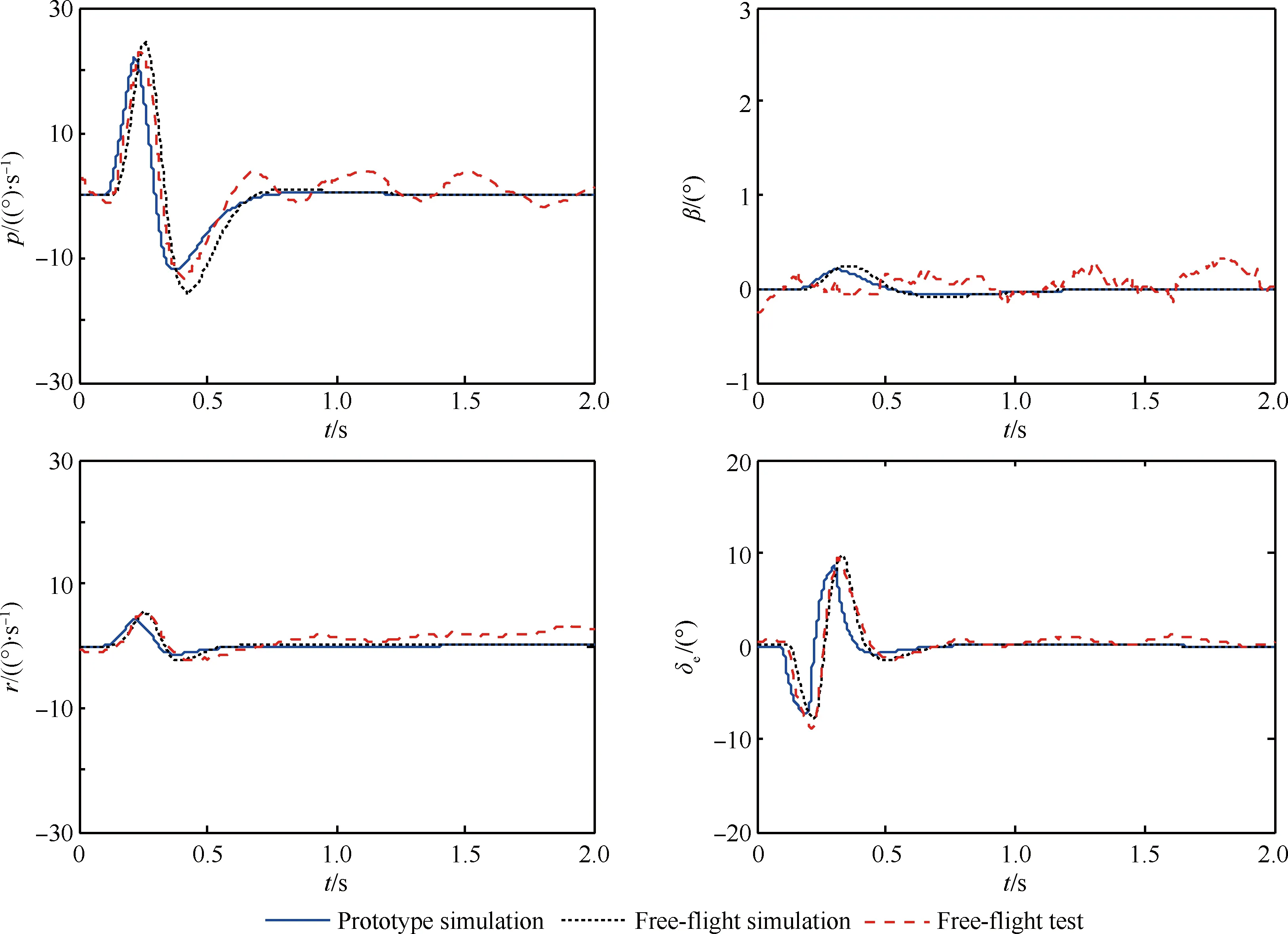
图7 对偶方波激励下风洞自由飞试验与原型机仿真横向响应对比(αtrim=15.5°)Fig.7 Comparison of lateral response of free-flight wind tunnel test and prototype aircraft simulation with dual square wave excitation(αtrim=15.5°)
表9 风洞模型自由飞试验相似参数模拟Table 9 Similitude parameters simulation of wind tunnel model free-flight test
注:“√” 表示满足相似关系。
与原型机响应相比可以看出,在对偶方波激励下,风洞模型自由飞试验结果中,纵向短周期阻尼偏小,迎角、俯仰角速度响应幅值和延迟偏大;横航向响应阻尼特性基本一致,响应幅值和响应速度略有差别,但基本上定量反映了原型机响应特性。进一步地,与按照风洞模型自由飞实际满足的相似条件的仿真结果对比分析可以看出:对于定量研究而言,表征传感器和舵机动态性能的相似参数的差异主要影响飞机纵横向响应幅值和响应速度,特别是模型舵机与原型机舵机饱和速率的差异对于飞机响应相似性影响显著;俯仰阻尼的差异主要来源于施加激励时模型扰动运动过程中软管对俯仰力矩的动态干扰。因此,为了更准确获得定量研究结果,下一步工作中,试验系统应根据相似准则,从以下方面改进:一是提高传感器和舵机动态性能,特别是舵机最大偏转角速度;二是采用三自由度回转接头连接高压通气软管和模型,以降低通气软管对俯仰力矩的常值干扰和动态干扰;或改进动力模拟方式,采用微型涡喷发动机,从而消除供气软管的影响。
3.4 控制律增益调整试验
图8给出了控制律部分增益调整时飞机响应的变化情况。控制律增益调整情况如表10所示。
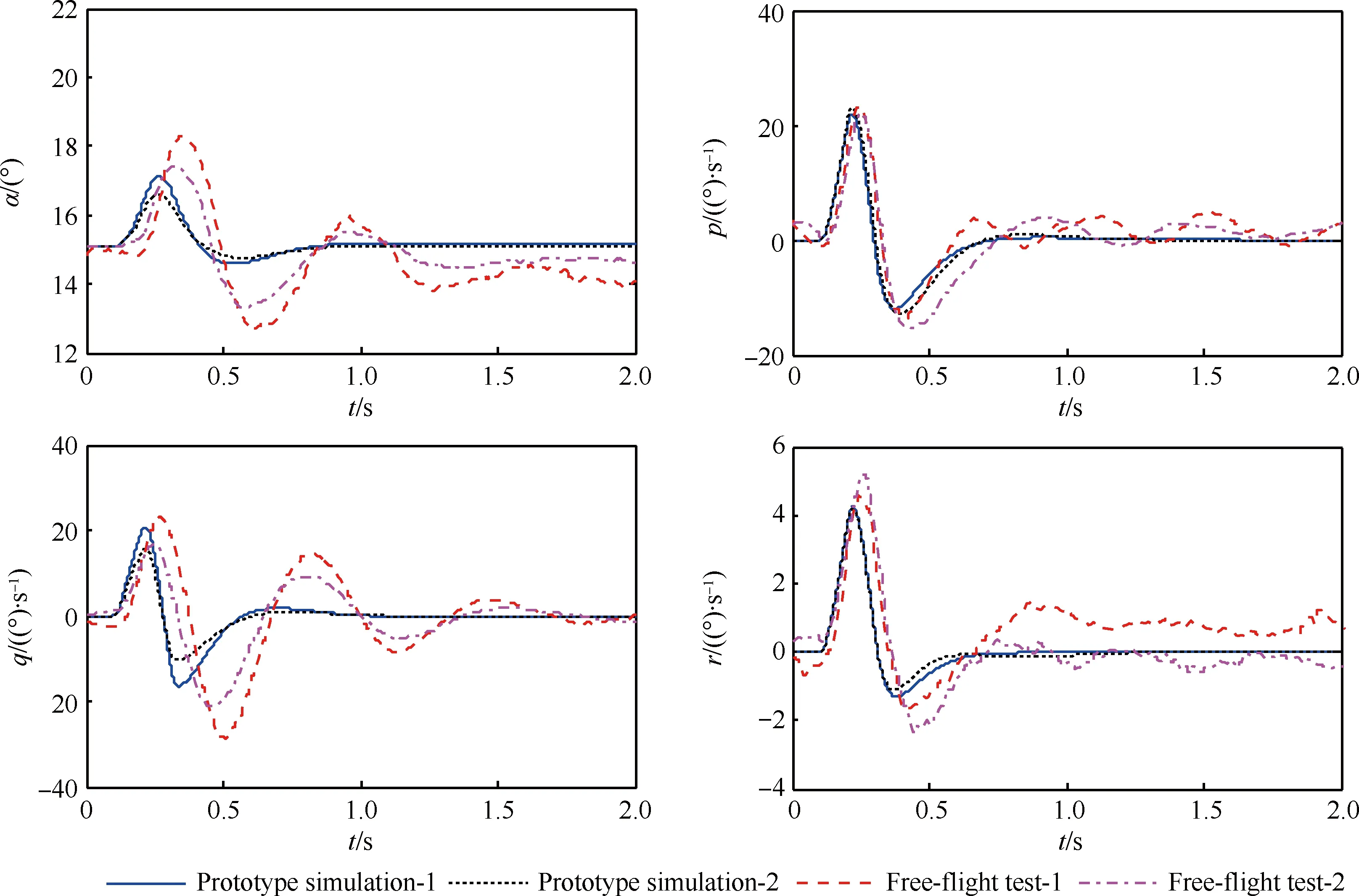
图8 控制律增益调整前后原型机和风洞模型自由飞试验响应的变化Fig.8 Changes of aircraft response in wind tunnel free-flight test and prototype simulation with different feedback gain
从原型机仿真结果可以看出:纵向增益减小后,纵向机动过程中俯仰速率及迎角响应幅值减小,响应快速性降低,但阻尼增大;滚转角速率反馈减小后,横航向机动过程中滚转速率响应幅值略有增大,阻尼减小,横向响应频率略有减小。
相应地,尽管在相同增益时风洞模型自由飞试验结果与原型机仿真存在一定差异(原因见3.3节分析),但控制增益调整前后,风洞模型自由飞试验结果反映出来的飞机响应的变化与原型机响应变化规律一致,即试验结果准确反映了控制增益调整后飞机稳定性与控制特性的变化。同时,增益调整后,飞行操纵员反映,飞行操控难度有所增加,飞机响应变慢,从驾驶员主观评价的角度也可以评估飞机操纵特性的变化。
该项试验结果表明,尽管本期试验中的传感器和舵机未能完全满足相似要求以及存在通气软管对俯仰力矩的干扰,风洞模型自由飞试验仍能准确预测控制增益调整前后飞机稳定性与控制特性的变化,进一步验证了该试验平台可以对飞行控制律进行验证,从而在飞行器设计初期对关键控制参数进行优化设计和快速评估。

表10 控制增益调整Table 10 Adjustment of control gain
3.5 大迎角试验
风洞模型自由飞试验的一个重要应用是验证大迎角飞行控制律,预测大迎角失速/偏离特性。为此,开展大迎角试验研究。图9给出了一组大迎角试验结果曲线。图中,δe、δa和δr分别为升降舵、副翼和方向舵偏角。可以看出,迎角小于35°时,模型可保持稳定可控飞行;迎角大于35°后,出现了航向偏离,方向舵最先出现饱和,模型失控。
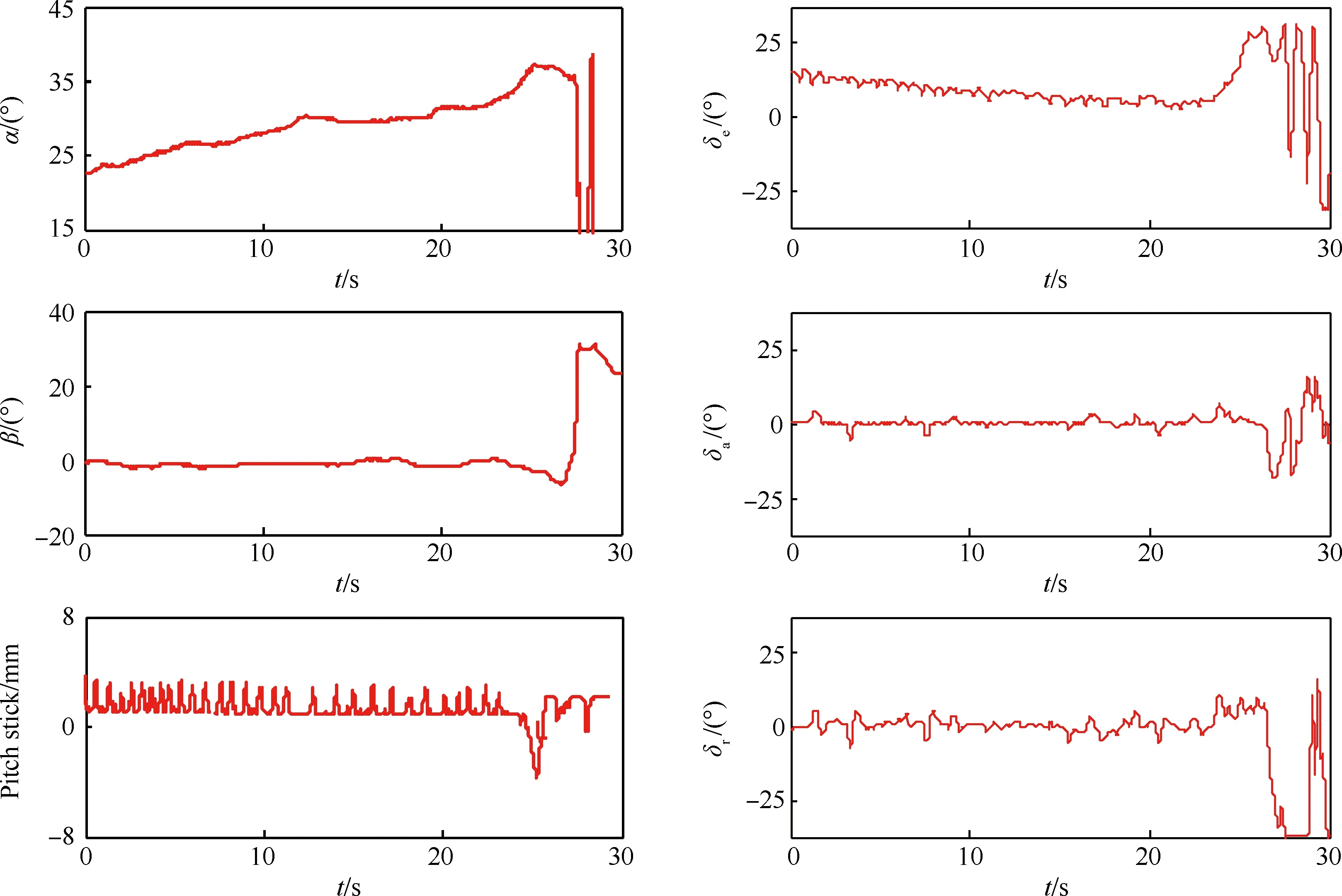
图9 风洞模型自由飞大迎角试验Fig.9 Wind tunnel aircraft free-flight test at high angle of attack
可见,通过风洞模型自由飞试验,可以研究飞机的失速/偏离特性,并对采取不同改进措施后的效果进行快速验证,对于预测和改进大迎角飞行特性具有重要意义。
4 结 论
系统研究了低速风洞带动力模型自由飞试验技术,建立了试验模拟方法、飞行操纵方法、试验设计方法以及结果评估方法等,开展风洞模型自由飞试验结果与原型机特性的相关性研究,获得了定量分析中应注意的问题以及试验系统改进方向,有利于试验技术的完善和工程化应用。
1) 低速风洞带动力模型自由飞试验技术作为常规风洞到飞行试验之间的重要环节,实现了在风洞中开展飞行器气动/飞行/控制一体化研究,可在飞行器研制初期及早发现设计缺陷,有效降低技术风险。
2) 基于相似准则建立的低速风洞带动力模型自由飞试验系统,试验结果可以定性反映原型机稳定性与控制特性,实现原型机飞行控制律验证和大迎角失速/偏离特性预测,试验技术初步具备工程化应用能力。
3) 为了进一步实现定量评估与研究,风洞带动力模型自由飞试验系统需要根据相似准则要求进一步优化,重点提升飞行参数测量传感器和舵机的动态性能;同时,改进模型动力模拟系统,以降低或消除动力供气管路对模型气动及运动特性的影响。
[1] 朱自强, 王晓璐, 吴宗成, 等. 民机设计中的多学科优化和数值模拟[J]. 航空学报, 2007, 28(1): 1-13.
ZHU Z Q, WANG X L, WU Z C, et al. Multi-disciplinary optimization and numerical simulation in civil aircraft design[J]. Acta Aeronautica et Astronautica Sinica, 2007, 28(1): 1-13(in Chinese).
[2] 陈宗基, 张汝麟, 张平, 等. 飞行器控制面临的机遇与挑战[J]. 自动化学报, 2013, 39(6): 703-710.
CHEN Z J, ZHANG R L, ZHANG P, et al. Flight control: Challenges and opportunities[J]. Acta Automatica Sinica, 2013, 39(6): 703-710 (in Chinese).
[3] 何开锋, 刘刚, 张利辉, 等. 航空器带动力自主控制模型飞行试验技术研究进展[J]. 实验流体力学, 2016, 30(2): 1-7.
HE K F, LIU G, ZHANG L H, et al. Research progress on model flight test of powered aircraft with autonomous control system[J]. Journal of Experiments in Fluid Mechanics, 2016, 30(2): 1-7 (in Chinese).
[4] 周自全, 赵永杰. 空中飞行模拟与电传飞机飞行试验[J]. 飞行力学, 2005, 23(1): 19-26.
ZHOU Z Q, ZHAO Y J. In-flight simulation and FBW aircraft flight tests[J]. Flight Dynamics, 2005, 23(1): 19-26 (in Chinese).
[5] CAMPBELL J R. Free and semi-free model flight-testing techniques used in low-speed studies of dynamic stability and control:NASA-TM-450785[R]. Washington, D.C.: NASA, 1963.
[6] BRUCE D O, BRANDON J M, CROOM M A, et al. Overview of dynamic test techniques for flight dynamics research at NASA LaRC (Invited)[C]∥25th AIAA Aerodynamic Measurement Technology and Ground Testing Conference. Reston, VA: AIAA, 2006: 655-688.
[7] BOISSEAU P C. Flight investigation of dynamic stability and control characteristics of a 1/10-scale model of a variable-wing-sweep fighter airplane configuration: NASA TM X-1367[R]. Washington, D.C.: NASA, 1967.
[8] NEWSOM W A, GRAFTON S B. Free-flight investigation of a 1/17-scale model of the B-1 airplane at high angles of attack:NASA-TM-SX-2744[R]. Washington, D.C.: NASA, 1973.
[9] GRAFTON S B, CHAMBERS J R. Wind tunnel free-flight investigation of a model of a spin-resistant fighter configuration:NASA-TN D-7716[R]. Washington, D.C.: NASA, 1974.
[10] MULLIN S N. The evolution of the F-22 advanced tactical fighter:AIAA-1992-4188[R]. Reston, VA: AIAA, 1992.
[11] CHAMBERS J R, BURLEY J R. High-angle-of-attack technology-accomplishments, lessons learned, and future directions: NASA/CP-1998-207676[R]. Washington,D.C.: NASA, 1998.
[12] JACKSON E B, BUTTRILL C W.Control laws for a wind tunnel free-flight study of a blended-wing-body Aircraft: NASA-TM-2006-214501[R]. Washington, D.C.: NASA, 2006.
[13] 孙海生, 岑飞, 聂博文, 等. 水平风洞模型自由飞试验技术研究现状及展望[J]. 实验流体力学, 2011, 25(4): 103-108.
SUN H S, CEN F, NIE B W, et al. Present research status and prospective application of wind tunnel free-flight test technique[J]. Journal of Experiments in Fluid Mechanics, 2011, 25(4): 103-108 (in Chinese).
[14] 岑飞. 水平风洞模型自由飞中的飞行控制系统关键技术研究[D]. 绵阳:中国空气动力研究与发展中心, 2011: 11-16.
CEN F. Design of flight control system for wind tunnel free-flight test[D]. Mianyang: China Aerodynamics Research and Development Center, 2011: 11-16 (in Chinese).
[15] 耿玺, 史志伟. 面向过失速机动的风洞动态试验相似准则探讨[J]. 实验流体力学, 2011, 25(3): 41-45.
GENG X, SHI Z W. Similarity criterion of the wind tunnel test for the post-stall maneuver[J]. Journal of Experiments in Fluid Mechanics, 2011, 25(3): 41-45 (in Chinese).
[16] 王勋年. 低速风洞试验[M]. 北京: 国防工业出版社, 2002: 23-25.
WANG X N. Low speed wind tunnel test[M]. Beijing: National Defence Industry Press, 2002: 23-25 (in Chinese).
[17] CHAMBERS J R. Modeling flight: The role of dynamically-scaled free-flight models in support of NASA’s aerospace programs[M]. Washington,D.C.: NASA, 2010: 15-16.
[18] EDWARDS J W, DEETS D A. Development of a remote digital augmentation system and application to a remotely piloted research vehicle: NASA TN D-7941[R]. Washington, D.C.: NASA, 1975.
[19] 陈孟钢, 高金源. 缩比模型飞机及其飞控系统与原型机的相似关系[J]. 飞行力学, 2003, 21(2): 34-37.
CHEN M G, GAO J Y. Similarity relationships between scaled-model aircraft with its flight control system and prototype aircraft[J]. Flight Dynamics, 2003, 21(2): 34-37 (in Chinese).
[20] 郭林亮, 祝明洪, 孔鹏, 等. 风洞虚拟飞行模型机与原型机动力学特性分析[J]. 航空学报, 2016, 37(8): 2583-2593.
GUO L L, ZHU M H, KONG P, et al. Analysis of dynamic characteristics between prototype aircraft and scaled-model of virtual flight test in wind tunnel[J]. Acta Aeronautica et Astronautica Sinica, 2016, 37(8): 2583-2593 (in Chinese).
[21] CEN F, LI Q, FAN L T, et al. Development of a pilot-in-loop real-time simulation platform for wind tunnel free-flight test[C]∥Proceeding of 2015 IEEE International Conference on Information and Automation. Piscataway, NJ:IEEE Press, 2015: 2433-2438.
Lowspeedwindtunnelfree-flighttestofpoweredsub-scaleaircraft
CENFei1,*,NIEBowen2,LIUZhitao2,SUNHaisheng2,LIQing1
1.DepartmentofAutomation,TsinghuaUniversity,Beijing100084,China2.ChinaAerodynamicsResearchandDevelopmentCenter,Mianyang621000,China
Tosimulatethephysicalprogressoftheaircraftflyingatsix-degree-of-freedominthewindtunnelandachievetheaerodynamics,kinematicsandflight-controlcouplingcharacteristicsoftheaircraft,thelowspeedwindtunnelfree-flighttesttechniqueforpoweredsub-scaleaircraftisstudied.Basedonthesimilaritycriterion,atestplatformisestablishedinalarge-scalelowspeedwindtunnel.Adynamicsub-scalemodelwhichisunstableinlongitudinalstaticstabilityisaugmentedaccordingtoflightcontrollaws,andfliesinthewindtunneltestsectionwith1gtrimcondition,doubletcontrolinputs,adjustedcontrolfeed-backgainsandhighangleofattack.Thecorrelationbetweenthefree-flighttestresultsofthesub-scalemodelandthesimulationresultsofthefull-scaleprototypeaircraftisanalyzed.Theresultsshowthatthewindtunnelfree-flighttestplatformdevelopedbasedonthesimilaritycriterioncaneffectivelysimulatetheactualflightprocessoftheaircraftaugmentedwithflightcontrollaws,andthestabilityandcontrolcharacteristicsofthesub-scalemodelrepresentingtheprototypeaircraft,andisthusespeciallyusefulforverificationofflightcontrollawsandpredictionofstall/departurecharacteristics.Theestablishedtestplatformhasthecapabilityofconductingintegratedresearchonthecouplingbetweenaerodynamics,flightdynamicsandflightcontrolcharacteristics.
windtunnel;flighttest;flyingquality;dynamicstability;flightcontrol
2017-03-03;Revised2017-03-30;Accepted2017-04-10;Publishedonline2017-04-151351
URL:http://hkxb.buaa.edu.cn/CN/html/20171006.html
.E-mailcenf14@mails.tsinghua.edu.cn
http://hkxb.buaa.edu.cnhkxb@buaa.edu.cn
10.7527/S1000-6893.2017.121214
V211.7
A
1000-6893(2017)10-121214-13
2017-03-03;退修日期2017-03-30;录用日期2017-04-10;< class="emphasis_bold">网络出版时间
时间:2017-04-151351
http://hkxb.buaa.edu.cn/CN/html/20171006.html
*
.E-mailcenf14@mails.tsinghua.edu.cn
岑飞,聂博文,刘志涛,等.低速风洞带动力模型自由飞试验J.航空学报,2017,38(10):121214.CENF,NIEBW,LIUZT,etal.Lowspeedwindtunnelfree-flighttestofpoweredsub-scaleaircraftJ.ActaAeronauticaetAstronauticaSinica,2017,38(10):121214.
(责任编辑:李明敏)
猜你喜欢
军民两用技术与产品(2021年9期)2021-11-27
军民两用技术与产品(2021年8期)2021-11-24
北京航空航天大学学报(2021年6期)2021-07-20
西安航空学院学报(2020年1期)2020-06-01
装备环境工程(2020年2期)2020-03-23
———重庆建成世界一流汽车风洞
汽车零部件(2019年7期)2019-08-16
数学大王·中高年级(2018年11期)2018-12-17
现代兵器(2016年4期)2016-04-27
科技传播(2014年4期)2014-12-02