磁保持继电器的稳健性参数设计
2017-11-13 08:34:10苏秀苹杜士平乔延华庞晓梦
河北工业大学学报 2017年5期
苏秀苹,杜士平,乔延华,庞晓梦
(河北工业大学 电磁场与电器可靠性省部共建重点实验室,天津 300130)
磁保持继电器的稳健性参数设计
苏秀苹,杜士平,乔延华,庞晓梦
(河北工业大学 电磁场与电器可靠性省部共建重点实验室,天津 300130)
随着磁保持继电器的普遍应用,其稳健性也受到越来越多的关注.对于继电器电磁系统的设计,一直以来都仅仅是以保证它的输出特性为最好进行设计的,并没有考虑噪声因素造成的其性能的波动.通过利用ANSYS和ADAMS软件针对某型号三相磁保持继电器进行动力学仿真,找到触头分断速度与时间之间的关系.提出了以3个触头分断速度作为目标函数对该继电器电磁系统进行多目标参数优化设计.通过信噪比和灵敏度方差分析确定各个参数类型,并找到了最佳参数水平组合,这对提高磁保持继电器的稳健性具有重要意义.
磁保持继电器;参数设计;信噪比;灵敏度;稳健性;触头分断速度
0 引言
产品的一系列固有特性能够满足使用者要求的程度称为产品质量,而这一系列固有特性则称为产品的质量特性(如性能、安全可靠性、美观耐用性以及环境适应性等等).产品的实际质量特性与期望的设计目标值之间往往会有一定的差异存在[1],而且会由于外界因素(如环境、时间和生产制造等)的影响而产生波动,从而造成产品质量特性的不稳定即产品的不稳健.一直以来,稳健性设计方法大多用在机械产品的一致性研究中.文献 [2]利用田口设计方法针对柔性铰链的主要结构参数进行稳健性研究.与传统设计方法相比,此优化设计方法使信噪比提高了.文献 [3]针对某型号汽车的悬架采用田口稳健性设计方法进行了多目标优化设计,并进一步采用蒙特卡罗方法进行结果验证,证明悬架在优化设计后其稳健性能提高了.文献 [4]提出建立汽车双横臂悬架的Kriging模型对其进行稳健性优化设计.考虑到噪声因素的影响,通过粒子群算法对多目标进行处理,找到了不仅能保证双横臂悬架性能还能提高其稳健性的最优组合.
物间干扰、内干扰以及外干扰是造成产品功能波动的3个主要原因.对于磁保持继电器来说,物间干扰主要是指后期的加工制造存在分散性造成的干扰;内干扰主要是随着磁保持继电器使用次数的增多以及时间的推移,动静触头会发生磨损老化引起的;外干扰主要是指因外界条件的改变(如磁保持继电器的存储条件,其应用场合的环境条件等)使得继电器输出性能发生波动.
磁保持继电器电磁系统的设计经常将输出性能最优作为目标来进行各参数的设计[5].因此常常忽略了加工制造等噪声因素方面带来的理论上的误差,使得设计方案很难确保同一批产品性能的一致性和可靠性.然而,生产过程中不确定性导致的一致性问题是影响磁保持继电器质量的重要因素[6].稳健性参数设计的目的就是在可控因素水平发生变化时,研究外干扰,内干扰及物间干扰造成产品输出特性波动的变化[7-8].由于电磁系统的输出特性值与其各参数水平组合间并不是线性关系,从而一定可以找到1组能使继电器产品输出特性波动小,性能稳定的最佳参数组合.针对某型号三相磁保持继电器进行研究,采用三因素三水平多目标函数对其电磁系统进行参数优化设计.
1 磁保持继电器动态特性仿真计算
1.1 磁保持继电器模型
本文的研究对象是某型号三相磁保持继电器.模型主要包括电磁系统(2个轭铁、1个永久磁铁、2个磁极、铁芯)、推动杆、动静触头、分流片、动簧片、弹片等.图1所示为所研究磁保持继电器结构图,图2是磁保持继电器电磁机构.

图1 磁保持继电器整体结构Fig.1 Integral structure of magnetic latching relay

图2 磁保持继电器电磁机构Fig.2 Electromagnetic mechanism of magnetic latching relay
1.2 仿真模型的建立
ANSYS软件是大型有限元分析通用软件,在电磁分析方面具有很高的精确度.本文利用ANSYS仿真软件对磁保持继电器电磁系统的部分参数进行了静态仿真分析,得到磁链和力矩,然后再将磁链和力矩添加到ADAMS模型研究机械构件动态特性.
作为动力学仿真软件,ADAMS软件的应用十分广泛,如在接触器,断路器,继电器等等电器产品的动态特性研究中都会用到ADAMS软件[9-12].本文三相磁保持继电器ADAMS模型如图3所示.首先通过仿真电流与实际电流的对比验证仿真模型的正确性,对比如图4所示,两曲线基本一致说明建立的仿真电流与实际电流的对比验证了仿真模型的正确性,对比如图4所示,两曲线基本一致说明建立的仿真模型可用.本文电磁系统参数设计的目标函数是触点分断速度,因此对其动态性能的研究主要是触点分断速度.图5则是某组参数下动触点1的分断速度曲线图.

图3 磁保持继电器ADAMS仿真模型Fig.3 ADAMS simulation model of magnetic latching relay

图4 触点分断过程实测电流与仿真电流Fig.4 The measured current and simulated current during the contact breaking

图5 动触点1的分断速度Fig.5 Opening speed of the moving contact 1
1.3 目标函数的确定
继电器寿命包括机械寿命和电寿命.触头在分断过程中容易产生电弧造成触头烧蚀,这样会使触头电寿命降低.当在保证触头材料,电源电压,负载类型不发生变化时,触头的分断速度是影响触头燃弧时间的关键因素[13-14].分断速度减小,燃弧时间增加;分断速度增加,燃弧时间减小.因此本文将3个触头的分断速度定为目标函数.
2 试验设计
2.1 确定试验因素
三相磁保持继电器的电磁系统结构虽然简单,但是其包含的设计参数有很多,考虑到如果将它们都作为试验因素,时间长计算量大的问题,因此可以先利用不同参数单独连续作用,然后观察各个参数对目标函数的影响程度,最后筛选出对目标函数影响大的参数作为设计参数,这样可以节约时间提高效率.本文最后确定轭铁长A、磁钢长B、磁钢宽C以及内铁芯长D为试验因素.由于三相磁保持继电器外壳尺寸对内铁芯长会产生一定的限制,因此将内铁芯长仅作为不可控因素即噪声因素来研究其波动影响.
2.2 内设计
根据上面所确定的设计参数制定三相磁保持继电器电磁系统的可控因素水平表,如表1所示.
针对表1制定正交内表L9(3 4),如表2所示.因为本文目标函数为动触点1、2、3的分断速度,属于多目标的参数设计,所以不仅要计算信噪比还要计算灵敏度来确定各因素属于稳定因素、调整因素还是其他.这样可以使最优参数水平组合的选择更加合理准确,从而提高设计方案的性能.以下是望目特性信噪比及灵敏度计算公式[15].
望目特性信噪比计算公式灵敏度计算公式


表1 电磁系统可控因素水平表Tab.1 The controllable factor level table of electromagnetic system


表2 试验计算结果(内表)Tab.2 Results of test(inside table)
2.3 外设计
误差因素是依据不可控因素即噪声因素以及受加工工艺分散性影响的可控因素设定[16].本文根据公司提供的各个参数值波动范围,确定所研究的各因素误差水平值大小,制定的不可控因素水平表如表3所示.由2.2节内设计可知内表设计共有9组试验方案,而且每组试验对应1张外表,因此将产生9张外表,本文以第1组实验方案为例将结果列于表4中,其他表格不再一一列出.

表3 不可控因素表Tab.3 Uncontrollable factor table
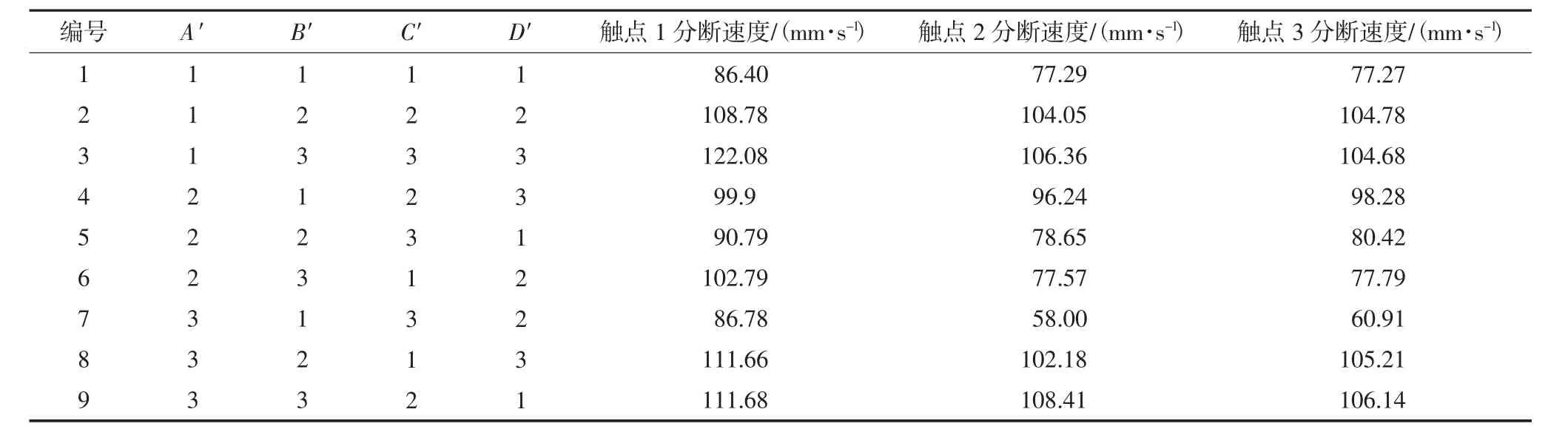
表4(第1组)试验方案计算结果(外表)Tab.4 (The first group)Results of test(Outside table)
3 试验数据分析及最佳水平组合确定
表5和表6分别是对信噪比和灵敏度的方差分析.根据对信噪比及灵敏度的方差分析,分别找出对信噪比和灵敏度有显著影响的因素,确定试验因素类型,最后分析结果如表7所示.因为本文目标函数望大即希望触点分断速度越大越好,所以对于因素A,选择的最佳水平是信噪比最大时的参数水平,对于因素B和C选择的最佳水平是灵敏度最大时的参数水平.如表8所示,最终确定参数类型及最佳水平组合为A1B2C3即A=12.5 mm,B=17 mm,C=10.8 mm.
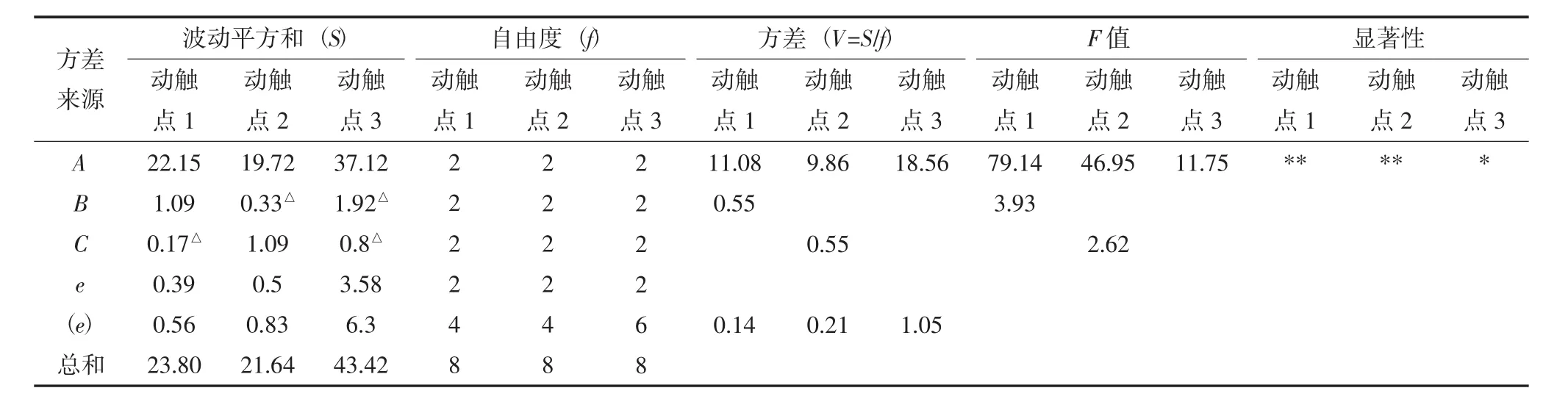
表5 触点分断速度望目特性信噪比方差分析(F24(0.1)=4.32,F24(0.05)=6.94)Tab.5 The signal to noise ratio variance analysis in target of contact opening speed(F24(0.1)=4.32,F24(0.05)=6.94)

表6 触点分断速度灵敏度方差分析表(F24(0.1)=4.32,F24(0.05)=6.94)Tab.6 Sensitivity variance analysis of contact opening speed(F24(0.1)=4.32,F24(0.05)=6.94)
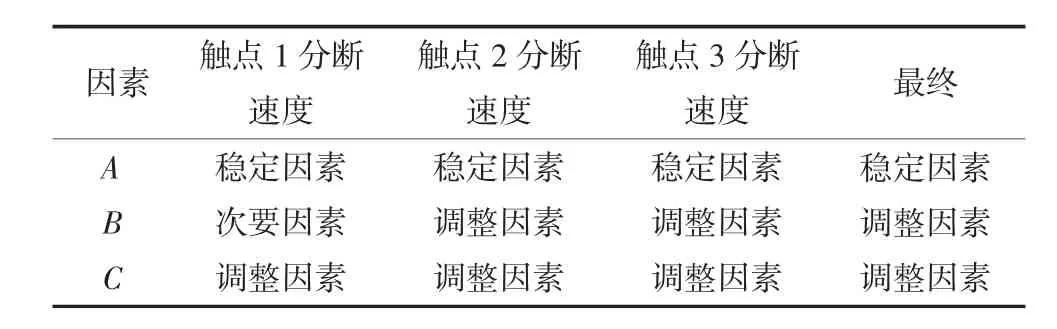
表7 设计参数类型确定Tab.7 The type of design parameters

表8 设计参数水平确定Tab.8 The level of design parameters
4 结语
本文通过利用ANSYS与ADAMS仿真软件对某型号三相磁保持继电器进行动力学仿真,得到触点分断速度与时间关系.然后采用3次设计方法对其电磁系统进行参数设计,紧接着根据对信噪比及灵敏度的方差分析,分别找出对信噪比和灵敏度有显著影响的因素,确定试验因素类型以及能使磁保持继电器质量波动最小的可控因素水平值的最佳组合.试验得出的最佳参数水平组合与原设计一致,说明原来的设计方案是十分合理的.
[1] 邓杰.航天电磁继电器稳健性设计研究[D].哈尔滨:哈尔滨工业大学,2010.
[2] 伍建军,万良琪,吴事浪,等.基于田口方法的柔性铰链柔度稳健优化设计[J].工程设计学报,2015,22(3):224-229.
[3] 张瑛,吴光强.基于田口方法的汽车悬架稳健性优化[J].机械与电子,2015(9):3-7.
[4] 程贤福,刘艳军,林彧群.汽车双横臂悬架参数稳健优化设计[J].机械科学与技术,2016,35(9):1421-1425.
[5] 梁慧敏,邓杰,翟国富.航天继电器电磁系统参数设计方案的稳健性研究[J].低压电器,2012(14):1-5.
[6] Ye X,Deng J,Wang Y,et al.Quality analysis and consistency design of electromagnetic device based on approximation model[J].IEEE Transactions on Components,Packaging and Manufacturing Technology,2015,5(1):99-107.
[7] 崔玉莲,吴纬.稳健设计综述[J].质量与可靠性,2010(4):10-13.
[8] 翟国富,梁慧敏,王嗥,等.基于正交试验设计的极化磁系统参数优化设计方法的研究[J].中国电机工程学报,2003,23(10):158-163.
[9] 陈德为,张培铭.基于人工鱼群算法的智能交流接触器虚拟样机优化设计[J].电工技术学,2011,26(2):101-107.
[10]鲍光海,吴守龙.接触器短路分断特性的动力学仿真及实验研究[J].电工技术学报,2014,29(9):181-186.
[11]张敬菽,陈德桂,刘洪武.低压断路器操作机构的动态仿真与优化设计[J].中国电机工程学报,2004,34(3):107-112.
[12]梁慧敏,于海丹,唐钰杰,等.双磁钢差动式电磁继电器虚拟样机与参数优化研究[J].中国电机工程学报,2016,36(1):258-267.
[13]翟国富,周学,杨文英.纵向与横向磁场作用下分断直流感性负载时的电弧特性实验[J].电工技术学报,2011,26(1):68-74.
[14]Sallais S,Ben Jemaa N,Carvou E ,et al.An arc study at high DC current levels in automotive application[C]//Electrical Contacts,Proceedings of 51th IEEE Holm Conference on 26-28,2005:329-333.
[15]吴佳伟,伍建军.基于平行四杆柔顺机构柔度稳健设计[J].机械设计与制造,2016(7):69-71.
[16]王其亚,翟国富,程贤科,等.基于正交试验设计的电磁继电器关键调整参数及优化方法[J].电工技术学报,2009,24(10):53-58.
Robust parameter optimization of magnetic latching relay
SU Xiuping,DU Shiping,QIAO Yanhua,PANG Xiaomeng
(Province-Ministry Joint Key Laboratory of Electromagnetic Field and Electrical Apparatus Reliability,Hebei University of Technology,Tianjin 300130,China)
With the widespread application of the magnetic latching relay,the robustness of the magnetic latching relay has
more attention.The relay electromagnetic system has always been designed to ensure its optimal output characteristics,and it has not considered the performance fluctuation caused by the noise.By using ANSYS and ADAMS software,the dynamic simulation of a three-phase magnetic latching relay was carried out to seek the relationship between the contact breaking speed and time.The paper proposes a multi-objective parameter optimization design for the electromagnetic system of the relay with three contact breaking speed as the objective function.The parameter types were determined by the variance analysis of signal noise ratio and sensitivity,and found the best parameter combination,it is important in improving the robustness of the magnetic latching relay.
magnetic latching relay;parameter design;signal to noise ratio;sensitivity;robustness;contact breaking speed
TM581.3
A
1007-2373(2017) 05-0017-06
10.14081/j.cnki.hgdxb.2017.05.003
2017-06-09
河北省自然科学基金(E2016202284)
苏秀萍(1966-),女,教授.
[责任编辑 代俊秋]
猜你喜欢
武汉广播影视(2022年6期)2022-12-28 06:38:12
军民两用技术与产品(2020年8期)2020-09-07 13:37:18
北京航空航天大学学报(2019年9期)2019-10-26 02:30:12
商情(2019年3期)2019-03-29 12:04:52
电子测试(2018年11期)2018-06-26 05:56:02
财讯(2018年22期)2018-05-14 08:55:57
雷达学报(2017年3期)2018-01-19 02:01:27
现代商贸工业(2016年35期)2016-04-09 06:59:32
中国炼油与石油化工(2015年4期)2015-06-22 14:19:10
西南石油大学学报(自然科学版)(2015年5期)2015-04-16 05:12:24