并联型骨外固定器在上肢畸形矫正中的应用
2017-11-13 08:34:26魏梦婷张习帅
河北工业大学学报 2017年5期
魏梦婷,张习帅,孙 昊,2
(1.河北工业大学 控制科学与工程学院,天津 300130;2.河北工业大学 智能康复装置与检测技术教育部工程研究中心,天津300130)
并联型骨外固定器在上肢畸形矫正中的应用
魏梦婷1,张习帅1,孙 昊1,2
(1.河北工业大学 控制科学与工程学院,天津 300130;2.河北工业大学 智能康复装置与检测技术教育部工程研究中心,天津300130)
常规的串联型骨外固定器无法治疗多维畸形的同期矫正.因此,将6-DOF并联型机器人与骨外固定技术相结合,应用于治疗复杂上肢畸形,可同时矫正四维畸形.而此技术存在人为主观上无法计算各驱动杆伸缩量及观测畸形骨段状态信息的问题.由此自主开发配套计算机软件.医生将由术后X线片测量的相关参数输入软件,通过计算机进行数学运算生成6根驱动杆每日调节量的电子处方,从而指导医生及患者通过渐进的调整驱动杆伸长或短缩来完成畸形矫正.同时,对整个矫正过程进行位姿三维仿真,使医生能够直观的分析畸形状态.临床实验结果表明,使用并联型骨外固定器进行上肢畸形矫正获得了理想的治疗效果.应用此技术提高了医护人员的工作效率和畸形矫正的调整精度,使得畸形矫正过程简单化、精准化、数字化.
并联机构;6-DOF;虚拟现实技术;骨外固定器;畸形矫正
上肢畸形[1]矫正一直是骨外科医生面临的最为棘手的问题之一.上肢的功能及解剖尤其复杂,从肩部到手上肢关节链可实现多个活动自由度.肘关节的屈伸及同步的前臂旋前旋后是上肢功能中最重要的一个.上肢的畸形矫正、功能重建与下肢相比,要求手术创伤小,固定时间短,尽量少的干扰前臂的旋转与手的灵活运动功能.而传统的串联型Ilizarov骨外固定技术[2-3]只能实现单一平面上位移或角度的调整.在矫正多维畸形时通常会出现有残留畸形的情况,此时需要进行框架调整及部件的置换,每次框架的重新安装都是一个劳动量相当大的过程,甚至可能导致二次位移,已经远远不能满足日益重视的精准医疗理念.因此迫切需要一种先进的医疗设备,能够精准、高效地帮助患者进行畸形矫正.
六自由度(Six Degrees of Freedom,6-DOF)并联机器人不仅具有位姿精度高、结构紧凑、承载能力强等优点[4-5],而且可实现三维空间中六自由度运动[6-7].目前在国内,六自由度在畸形矫正领域处于初步发展阶段,技术很不成熟.而在国外,以Taylor空间外固定器[8]为代表,但是其价格昂贵,且需要具备专业技能的医生才能使用,它尚未成为常规医疗设备.在传统正骨手法[9]的基础上,将6-DOF并联型机器人技术与骨外固定技术相结合为并联型骨外固定器,应用于上肢畸形矫正,通过对任何一种畸形状态进行六轴分析[10],完成成角、移位、旋转、短缩或分离等多维畸形[11]的同期矫正.但在矫正过程中存在2个问题:一方面,6-DOF并联机构的位姿是6根驱动杆协同工作的结果,而人为主观上无法计算6根驱动杆的伸缩量;另一方面,由于可视信息的局限性,无法看到矫正过程中的内部结构.因此,通过设计畸形矫正算法,开发配套计算机软件,生成能够指导医生及患者进行杆长调节的电子处方,并引入VRML技术,对畸形矫正过程进行三维仿真,便于医生观察并联型骨外固定器及畸形骨段的位姿状态.
1 畸形矫正原理
首先,医生选取畸形骨参照断裂处的近端或远端为参照骨段,则另一端为移动骨段.然后手术安装参照环,使之与参照骨段骨干纵轴垂直,安装移动环于移动骨段在患者舒适的位置,2个环分别与对应的骨段成为2个整体.最后连接6根驱动杆后拍摄正侧位X线片.以起始点为原点建立全局坐标系,对畸形状态进行六轴分析,并测量畸形参数、框架参数及初始杆长参数,将测量后的数据输入计算机软件,生成驱动杆每日调节量的电子处方.通过同时调整6根驱动杆的伸长量从而改变移动环的位姿,使其带动移动骨段进行与参照骨段间的相对运动,达到畸形矫正的目的.
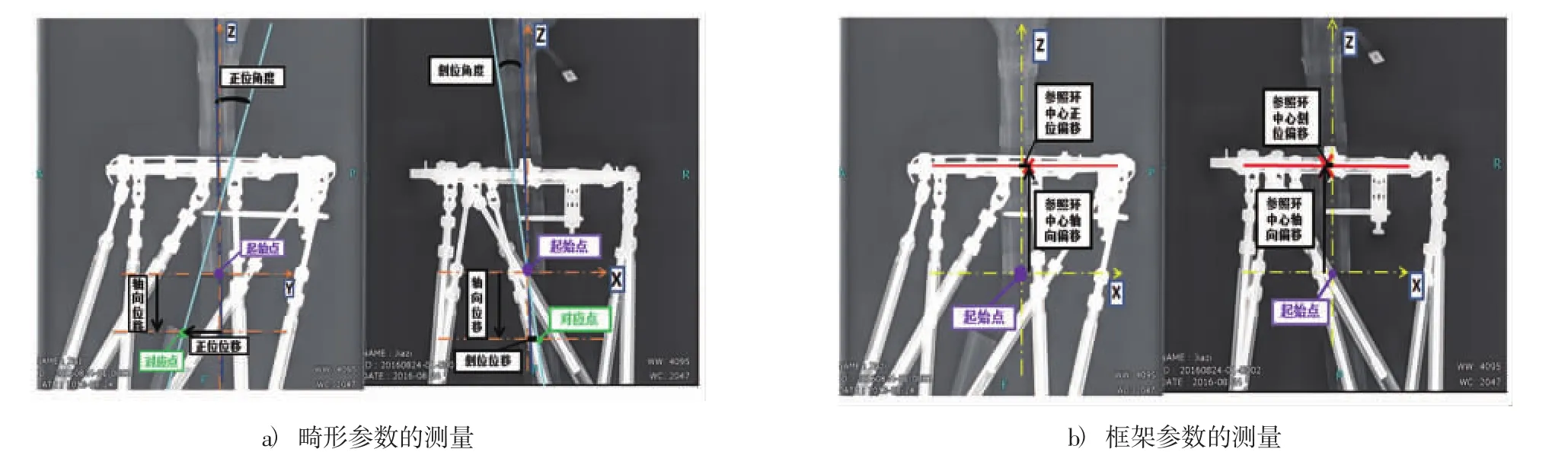
图1 参数测量Fig.1 Parameter measurement
2 畸形矫正算法
2.1 数学模型
分别以参照环和移动环的中心为原点,建立笛卡尔右手局部坐标系{P}和{B}.Xp轴正方向指向p1、p2的连线,Zp轴垂直于参照环指向上.Xb轴正方向指向b1、b2的连线,Zb轴垂直于移动环指向上.定义pi与Xp轴的夹角为λi,bi与Xb轴的夹角为Λi,参照环与移动环短边所对中心角分别为θp与θb.则pi点和bi点的位置向量分别为:

式中:i=1,2,…,6;rp和rb分别为参照环和移动环外接圆的半径.

图2 参照环和移动环各连接点定义Fig.2 Definitions of the connection points in the reference ring and the moving ring
定义6-DOF并联机构的2个工作空间为移动环位姿向量 [x0y0z0α0β0γ0]T和6根驱动杆长度向量[l1l2l3l4l5l6]T.两者关系为:已知移动环位姿,求得6根驱动杆杆长的过程为反解;已知6根驱动杆杆长,求得移动环位姿的过程为正解.
2.2 位姿反解
移动环绕坐标轴Xp、Yp、Zp旋转的角度为α、β、γ,位移为x、y、z,则移动环与参照环间的位置关系为

其中:R为移动环在坐标系 {P}下的方向余弦矩阵;q为移动环在坐标系 {P}下的位置矢量[x y z 1]T.

则各驱动杆长度为

2.3 位姿正解
要想得到畸形矫正时6根驱动杆的最终杆长,就必须知道移动环的位姿.此正解过程采用三维优化算法进行求解.

进而得出另外形式的6个独立方程如下:
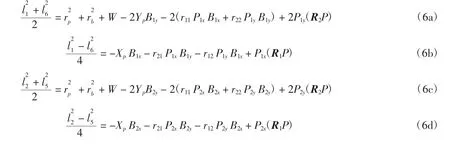

因为式(6) 中3组方程间相互独立,经化简结果表明dij均可由XP、YP、ZP来表示,最后得出仅包含三维变量(XPYPZP)的方程.

构造目标函数式(12),给定6根驱动杆的初始杆长,通过优化理论进行求解,最终即可求得移动环相对参照环的初始位姿.

3VRML仿真
在畸形矫正中,由于无法看到患者畸形骨段的状态信息,因此采用VRML技术对处方调整过程中随机一天的并联型骨外固定器支架及畸形骨段进行位姿三维仿真.医生既可将矫正前的初始位姿状态仿真结果与实际状态做对比,又能根据对矫正过程的位姿仿真,确定治疗方案是否可行.
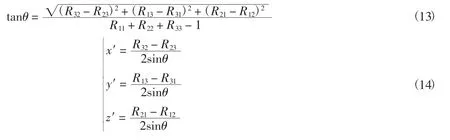
运用Transform坐标变换节点创建并联型骨外固定器支架和畸形骨段的整体造型时,需将方向余弦矩阵转化为等效旋转轴 [x′y′z′]及旋转角θ的形式.
4 实验
4.1 仿真实验
以左上肢畸形为例,给定初始6根驱动杆的杆长为:197 mm,180 mm,184 mm,169 mm,168 mm,190 mm.定义畸形参数:正位位移,内侧12.9 mm;侧位位移,前部15.0 mm;轴向位移,过长11.0 mm;正位角度,外翻10.0°;侧位角度,屈曲10.0°.框架参数:参考环中心正位偏移,前部5.0 mm;参考环中心轴向偏移,65.0 mm.
给定疗程15 d,经计算机程序进行数据处理后求得最终驱动杆杆长为:172 mm,165 mm,177 mm,170 mm,163 mm,167 mm.并生成电子处方如图3.同时,模拟仿真得到骨外固定器及畸形骨段的位姿图像.其中,矫正前的位姿如图4a)所示,按照处方调整过程中,随机第7 d的位姿图像为图4b),最终疗程结束时,其仿真图像如图4c),通过位姿三维仿真,可看出畸形状态明显改善,对治疗过程及最终效果有直观的分析.
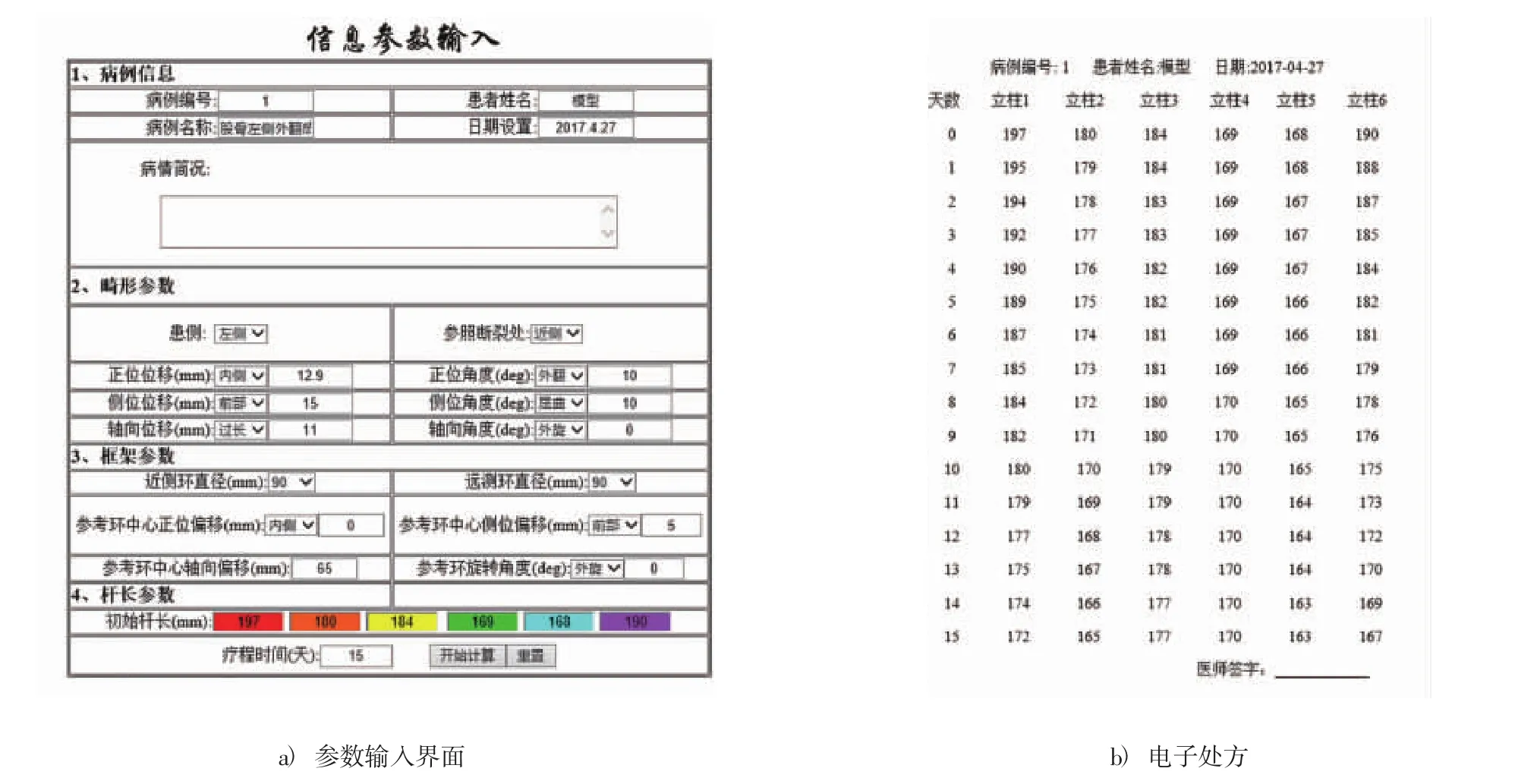
图3 电子处方模块Fig.3 Electronic prescription module
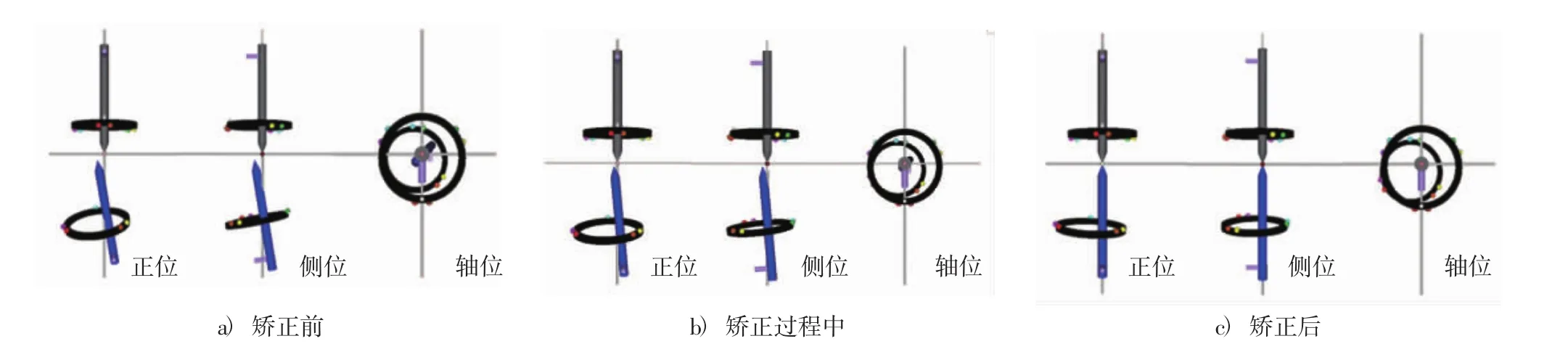
图4 三维仿真模块Fig.4 Three-dimensional simulation module
4.2 临床实验
女,18岁,左侧肘关节挛缩畸形,伸直功能受限,活动度50.0°,影响日常自行进食,其外观像如图5a).跨肘安装并联型骨外固定器,近侧全环以肱骨及肘关节纵轴为基准安装参照环,远侧前臂安装移动环.手术后6根驱动杆杆长为:145 mm,148 mm,199 mm,208 mm,221 mm,193 mm.根据图5b)拍摄的正侧位X线片,以肘关节为起始点进行测量,其畸形参数为:屈曲50.0°;框架参数为:参考环中心轴向偏移,87 mm.通过图6a),将测量的相关参数输入计算机软件,依据生成的电子处方,如图6b),矫正单一屈曲畸形.同时,计算机软件对调整过程中随机一天的外固定器支架及畸形骨段进行三维位姿仿真,如图7所示.矫正完成时最终6根杆长为:209 mm,216 mm,214 mm,179 mm,193 mm,201 mm.外固定支架拆除后,及时进行肘部主动及被动功能训练,恢复肘的活动度.最终治疗效果满意,无感染及并发症情况发生,如图5c).

图5 患者外观像及X线片Fig.5 Appearance and X-ray of the patient
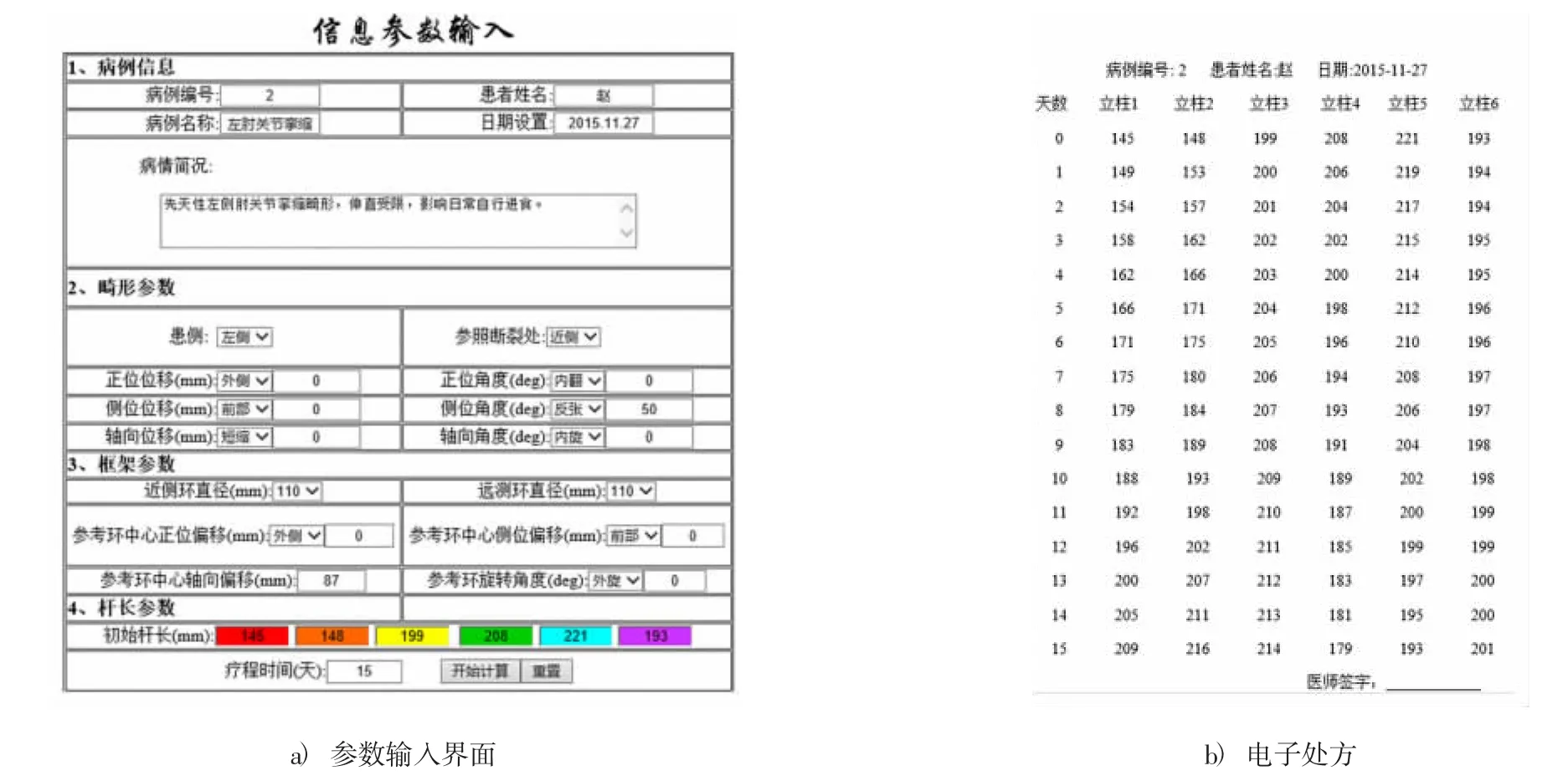
图6 临床患者电子处方Fig.6 Electronic prescription of the patient in clinical

图7 临床患者位姿三维仿真Fig.7 Three-dimensional simulation of the patient′s correction process
5 结论
实验结果表明,将6-DOF并联机器人技术与骨外固定技术相结合,应用于畸形矫正领域,获得了满意的治疗效果.此技术以医学理论为依据,根据并联机构的结构特点,建立并联型骨外固定器的数学模型及分析工作空间,设计畸形矫正算法,以数学运算为基础,计算机辅助下指导医生及患者完成杆长调整,达到畸形矫正目的,是微创治疗下数字化、精准化及智能化的结合体.并且在矫正过程中实现对并联型骨外固定器及畸形骨段的三维模拟仿真,便于医生直观地分析治疗方案的正确性及可行性.
通过设计双坐标系,将局部坐标系拟合到全局坐标系,对畸形进行六轴分析,将Ilizarov原理中在单一平面上的调整扩展为三维空间中的任意运动,可同期矫正多维畸形,缩短了治疗时间,减轻患者痛苦.而对于复杂畸形,又可转化为单一畸形分多次生成处方逐步矫正,避免了二次手术引起并发症的风险.
[1] Tetsworth K,Krome J,Paley D.Lengthening and deformity correction of the upper extremity by the ilizarov technique[J].Orthopedic Clinics of North America,1991,22(4):689-713.
[2] Barker K L,Lamb S E,Simpson A H.Functional recovery in patients with nonunion treated with the ilizarov technique[J].Bone&Joint Journal,2004,86(1):81-85.
[3] Park Y E,Song S H,Kwon H N,et al.Gradual correction of idiopathic genu varum deformity using the ilizarov technique[J].Knee Surgery Sports Traumatology Arthroscopy,2012,21(7):1523-1529.
[4] Stewart D.A Platform with six degrees of freedom[J].Archive Proceedings of the Institution of Mechanical Engineers 1847-1982 (vols 1-196),1965,180(1965):371-386.
[5]Wang J,Gao F,Wang L P.Mechanism design of a simplified 6-DOF 6-RUS parallel manipulator[J].Robotica,2002,20(1):81-91.
[6]Gosselin C.Determination of the workspace of 6-DOF parallel manipulators[J].Conf Proc,1990,c111010(3):331-336.
[7] Jin Y,Chen I M,Yang G.Kinematic design of a 6-DOF parallel manipulator with decoupled translation and rotation[J].IEEE Transactions on Robotics,2006,22(3):545-551.
[8] Manner H M,Huebl M,Radler C,et al.Accuracy of complex lower-limb deformity correction with external fixation:a comparison of the taylor spatial frame with the Ilizarov ring fixator[J].Journal of Childrens Orthopaedics,2007,1(1):55.
[9] 王田苗,李伟,刘达,等.机器人技术在中医正骨手术中的应用研究[J].机器人,2003,25(3):255-258.
[10]Taylor JC.Six-axis deformity analysis and correction[C]//Paley D,Herzenberg JE,editors.Principles of deformity correction.Berlin:Springer-Verlag,2002:411-436.
[11]Seide K,Faschingbauer M,Wenzl M E,et al.A Hexapod robot external fixator for computer assisted fracture reduction and deformity correction[J].The International Journal of Medical Robotics and Computer Assisted Surgery Mrcas,2004,1(1):64.
The application of parallel external fixation in the upper limbs deformity correction
WEI Mengting1,ZHANG Xishuai1,SUN Hao1,2
(1.School of Control Science and Engineering,Hebei University of Technology,Tianjin 300130,China;2.Engineering Research Center of Intelligent Rehabilitation,Ministry of Education,Hebei University of Technology,Tianjin 300130,China)
Conventional serialexternal fixation can't correct multidimensional deformitysimultaneously.Therefore,the 6-DOF parallel robot combined with external fixation technology to correct the complex upper limb deformity.It can correct four-dimensional deformities simultaneously.However,there are problems that the elongations of the six struts can't be calculated subjectively and the state of the deformed fragmen can't be observated.So,a computer software with independent intellectual property rights has been developed.Doctor use postoperative radiographs to measure the relevant parameters,then the measurement parameters are inputted into softwareto perform mathematical operations with computer-assisted.It will get the daily adjustment elongations of six struts with the time schedule,that is,electronic prescription.Gradual correction will be achieved through the lengthening or shortening of the struts.A three-dimensional pose simulation of the correction process is made,so that doctors can intuitively analyze the deformed state.Clinical results show that the use of parallel external fixator in correction of upper limb deformity can achieve satisfied outcomes.It improves the doctor's working efficiency and the adjustment accuracy of deformity correction.Besides,the correction process can be simplified,precise and digitized.
parallel manipulator;6-DOF;virtual reality technology;external fixation;deformity correction
TP 242.6;TP 391.4
A
1007-2373(2017) 05-0094-07
D OI:10.14081/j.cnki.hgdxb.2017.05.016
2017-07-08
国家科技支撑计划(2012BAI33B06);2017河北省研究生创新资助项目(220056)
魏梦婷(1992-),女,硕士研究生,201532502021@stu.hebut.edu.cn.通讯作者:孙昊(1979-),男,副教授,sunhao@hebut.edu.cn.
[责任编辑 杨 屹]
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22 07:26:40
测控技术(2018年6期)2018-11-25 09:50:08
中国自行车(2018年4期)2018-05-26 09:01:53
光学精密工程(2016年5期)2016-11-07 09:05:55
光学精密工程(2016年4期)2016-11-07 09:05:11
中国环境监察(2016年7期)2016-10-23 05:36:30
中国民族医药杂志(2016年7期)2016-05-09 07:49:09
通信电源技术(2016年1期)2016-04-16 04:57:26
通信电源技术(2016年5期)2016-03-22 01:09:37
湖北工业大学学报(2016年5期)2016-02-27 13:14:48