基于586-Driver的无人机飞控计算机智能检测系统研制
2017-11-03 03:13志宇
计算机测量与控制 2017年10期
,, ,志宇
(1.南京航空航天大学 中小型无人机先进技术工信部重点实验室,南京 210016;2.南京航空航天大学 自动化学院,南京 10016)
基于586-Driver的无人机飞控计算机智能检测系统研制
高艳辉1,肖莉萍1,李强2,李志宇1
(1.南京航空航天大学中小型无人机先进技术工信部重点实验室,南京210016;2.南京航空航天大学自动化学院,南京10016)
传统无人机飞控计算机检测以人工操作为主,操作繁琐、数据量大、易受人为因素影响,导致测试效率低、结果主观性强、安全性不足;提出基于信号门限自动检测技术的飞控计算机一键式全功能检测方案;以586-Driver板卡为核心,设计了接口板、电源板、信号调理板和检测板,研制了智能检测系统;模块功能包括底层驱动、时序控制、上电控制与电流检测、功能检测等模块,实现了在全程无人干预情况下对飞控计算机按预设时序逻辑的自动测试;采用人为注入故障测试方式进行了系统测试,结果表明:该系统满足某型飞控计算机的检测需求,提高了飞控计算机检测效率,具有实际工程应用价值。
飞控计算机;586-Driver;自动检测;信号门限检测
0 引言
随着航空技术和电子技术的发展,无人机技术越来越先进,无人机机载电子设备也越来越复杂,使得无人机出现故障的概率越来越高。因此,无人机这一复杂系统的维护保障已经提升到了和无人机研制同等重要的地位[1]。飞控计算机是无人机关键设备,不管在研制期间,还是在交付使用后都必须对其进行大量的地面检测[2],以保证无人机系统的安全性和可靠性。
传统的飞控计算机检测以人为操作为主,通过测试人员手动切换测试项并手动添加激励,观察测试现象并记录结果。但由于飞控计算机性能测试的被测信号具有种类多、特性范围宽、判据复杂的特点,传统的测试方法既费时又费力,还会影响无人机的试验进度。
本文利用信号门限检测技术,基于586-Driver研制了一套自动化、标准化、智能化的飞控计算机检测系统,解决传统测试过程中操作繁琐、数据量大、易受人为因素影响的问题。
1 信号门限检测技术原理
自动检测系统集合了功能强大的计算机软硬件和测量设备,将所有检测步骤通过软件控制,直接产生测试信号,解析测量特性,得出测量结果[3]。信号门限检测技术对于自动检测系统来说是一种基本但有效的故障检测方法,具体方法如下[4]:
对被测信号设置上限ymax和下限ymin,在任一时刻t,信号的测量值y(t)正常的取值范围是:
ymin≤y(t)≤ymax
(1)
当被测信号的测量值超出该范围达到一定次数或一定时间时,则说明系统处于故障状态,需排查故障。引进标记:

|Δy(t)|<α
(2)
根据被测信号的特点不同,门限检测的规则也会发生变化,有些被测信号只需检验上限或下限,有些则必须满足某一定值,表达式如下:
y(t)≤ymax或y(t)≥ymin
(3)
y(t)=y*
(4)
2 系统总体设计
2.1 一键式全功能检测方案
被测飞控计算机具有检测内容多、检测时间短以及检测结果务必准确的特点,要求自动检测系统必须具有较强的数据处理能力和较快的运行速度,以便能够在规定的任务周期内完成所有的检测任务。本系统采用一键式全功能检测方案,包括上电、电流监测、功能检测、正常断电以及应急断电保护等均要求由系统按时序逻辑控制自动完成。自动检测流程设计如下:
1)上电控制。待测飞控计算机供电时序如图1所示。为了保证供电安全,在对待测飞控计算机供电的同时,需对4路供电电流进行实时采集、监测,并在电流异常时及时进行断电处理。

图1 供电时序
2)飞控计算机功能测试。本系统包括了对飞控计算机的串口、SSD卡、DI、DO、A/D、D/A功能的检测。为了获取可靠的检测结果,排除各功能间的交叉影响,采取了各功能依次测试的方法。每种功能的检测步骤为:586-Driver发出测试信号,等待规定时间后采集并解析测量值,将测量结果与对应门限值进行比较得出检测结果。
3)待机状态。系统全自动检测完成后进入了待机状态,等待测试人员发出下一步的检测指令。测试人员可以根据检测结果选择再次全自动检测,也可以针对某一功能进行单项检测。
2.2 总体结构设计
飞控计算机智能检测系统的主要思想是以586-Driver为核心模拟飞控计算机所需的信息,通过串口、I/O、D/A等通道将信息传递给飞控计算机,并监测、检测飞控计算机的返回信息,对飞控计算机进行全方位的功能检测与故障诊断。智能检测系统的总体框架如图2所示。
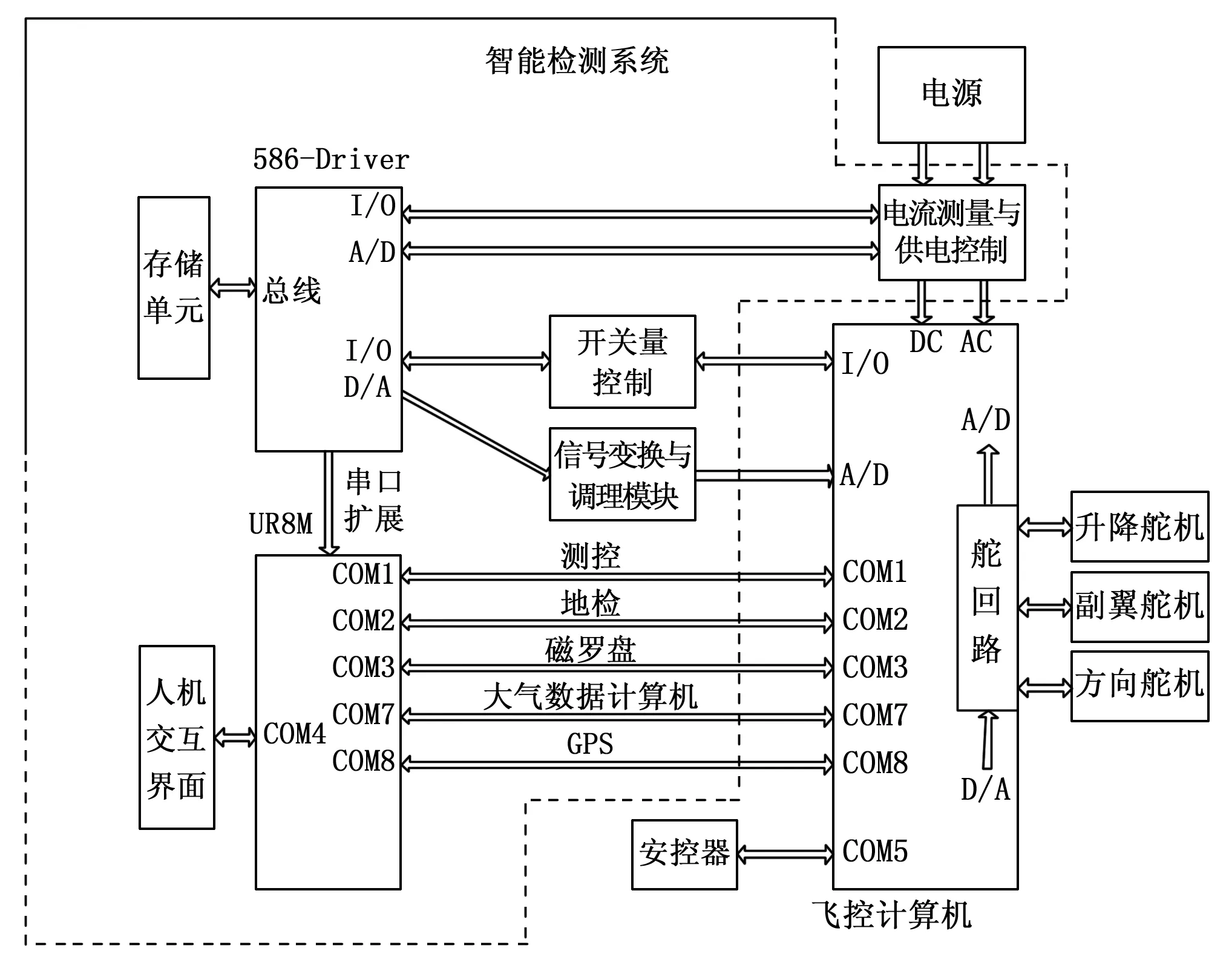
图2 无人机飞控计算机智能检测系统总体框图
3 硬件设计
根据586-Driver板卡特点以及串口扩展卡与其他电路的应用需求,基于易于拆卸、维护方便的原则,智能检测系统采用堆栈式构架,将整个硬件结构分为4个部分:586-Driver及其接口板、电源板、信号调理板和检测板。
3.1 主控芯片选型及资源分配
在综合考虑了对处理性能、片上资源、稳定性以及成本的多重要求后,本文选择TERN公司的586-Driver板卡作为主控芯片。586-Driver是基于AMD Elan SC520微处理器的核心板卡,集成了32位的AMD586中央处理器以及高性能硬件浮点运算单元(FPU)[5]。586-Driver板卡资源分配情况如表1所示。

表1 586-Driver板卡资源分配表
3.2 扩展串口选型及资源分配
串口扩展卡选用高性能的基于PC104总线的UR8M。UR8M是TERN公司的8路异步串口扩展卡,可以与586-Driver连接使用,无需多余的硬件接口设计。该卡提供RS232、RS485、RS422多种串口工作方式。每个通道FIFO高达64字节,可以减小CPU的中断数量并降低软件开销,满足系统需求。
3.3 信号变换与调理模块
586-Driver上的D/A单元LT2600用于输出5路模拟信号来模拟陀螺平台(θ俯仰角、γ滚转角)和速率陀螺(ωx滚转角速率、ωz俯仰角速率、ωy偏航角速率)的信息。该信号需进信号调理后,输出至飞控计算机。
信号调理电路的设计思路是将输入信号进行电平平移、放大或缩小,然后再进行低通滤波处理,除去高频噪声,以保证转换后的信号平滑稳定。本系统选用OP497FS高性能4运放芯片作为信号调理电路的核心芯片,选用REF43芯片为电平平移电路提供+2.5 V的电压参考进行设计。
3.4 电流测量与供电控制
待测飞控计算机需要4路电源:1路115 V交流电源和3路+27 V直流电源。电流检测与供电控制电路要实现对供电电源的通断控制并且实时检测电流大小,以保证飞控计算机的供电安全。
以+27 V电源为例,电流检测与供电控制电路设计如图3所示。586-Driver通过DO端口控制电磁继电器,进而控制+27 V电源是否接入飞控计算机,同时由A/D通道实时采集霍尔电流传感器的测量结果,其反馈电压一旦超出了预定范围,系统将自动控制DO端口停止对飞控计算机供电,达到保护飞控计算机的目的。
4 软件设计
本系统的时序控制、上电控制、自动检测等策略都是通过软件最终实现。软件开发环境为Paradigm C++ TERN Edition,采用C语言编程。软件工程采用模块化设计,由初始化模块、硬件底层接口模块、时序控制模块、上电控制与电流检测模块、功能检测模块以及待机管理等组成。

图3 电流检测与供电控制电路
初始化模块完成系统硬件、控制参数、软件变量的初始化工作。
硬件底层接口模块完成以下功能:
1)时钟中断模块:定时产生10 ms时钟中断,用于系统周期运行时间间隔基准;2)AD采样模块:实现AD通道的电压信号的实时采样;3)DA输出模块:实现DA通道的电压信号实时刷新;4)串行通讯模块:采用定时方式,实现串行数字量信息的发送和接收处理;5)数字量接口模块:利用中断或查询方式实现数字离散量的接收,同时根据任务需要实现数字量的高低电平输出。
4.1 时序控制模块
为了实现时序控制,预先对系统检测每一步操作之间的时间间隔进行分析并以数组的形式储存、固化在软件中。软件运行后,根据运行时间控制自动检测的进程。
4.2 上电控制与电流检测模块
上电控制与电流检测模块的程序流程图如图4所示。当系统为飞控计算机供电时,开始进行电流检测。电流需进行门限检测判断,若其超过门限范围,则将电流异常征兆次数i加1,当测量值连续n次(本文取5)超过门限值时,认为供电电流存在异常,需要进行断电处理并报警。

图4 上电控制与电流检测流程
4.3 功能检测模块
功能测试模块是智能检测系统的核心功能,实现对飞控计算机硬件接口、板卡的检测,单项功能检测流程如图5所示。首先初始化变量i、j,i表示检测次数,j表示故障发生的次数。然后系统发出检测信号,实时接收或延时接收返回值,再将返回值与门限值进行比较。由于单次检测存在一定偶然性,所以每项功能都要检测多次。当返回值超出门限值时,则将故障次数加1,当故障发生次数大于n次时,则认为发生故障并记录。
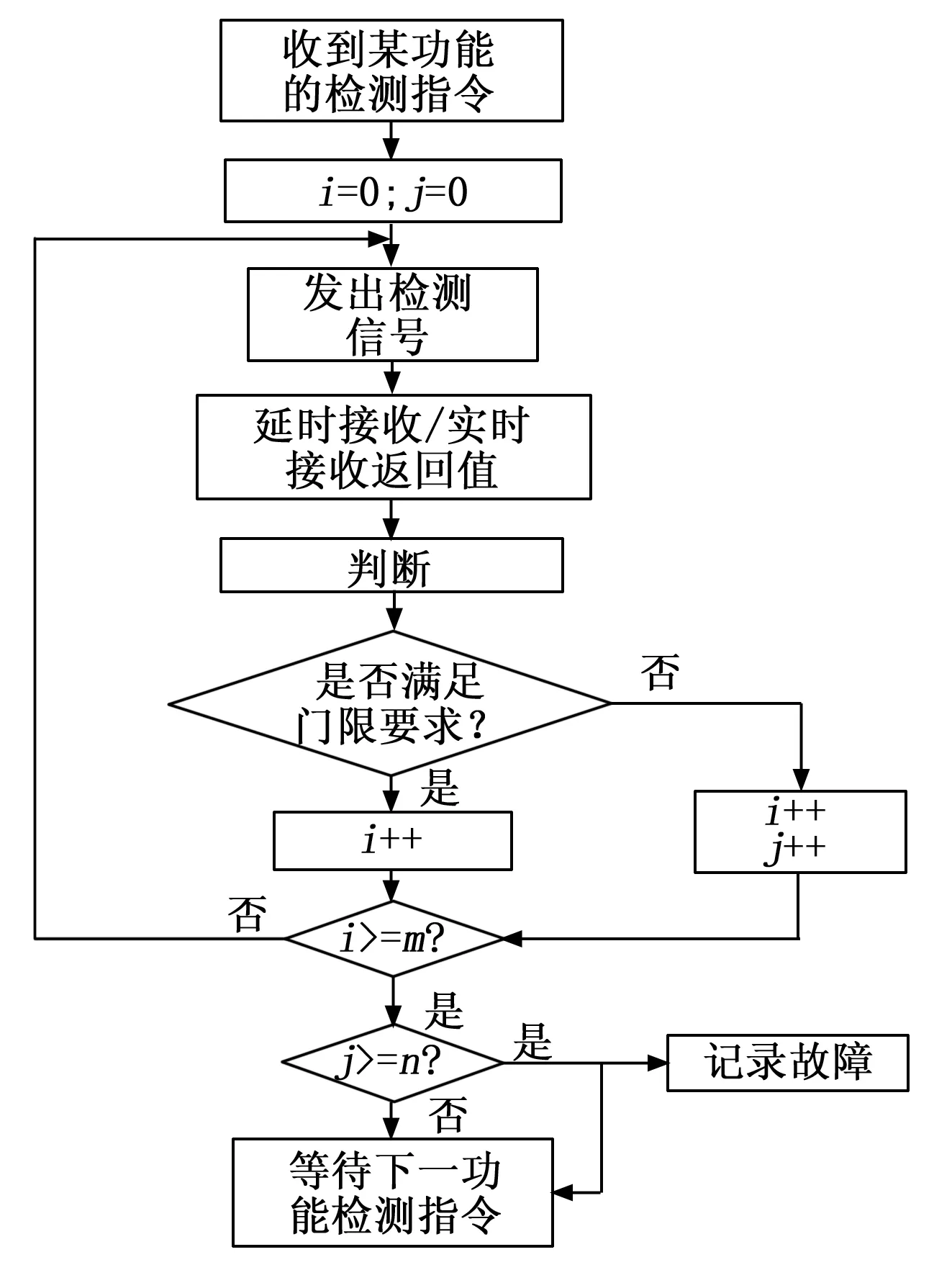
图5 功能检测流程
5 系统测试与分析
为验证自动检测和故障诊断的功能,本文采用人为注入故障的方法进行测试。智能飞控计算机检测系统对某型飞控计算机进行测试的接线关系示意如图6所示。经过多次测试后,实验结果如表2所示。
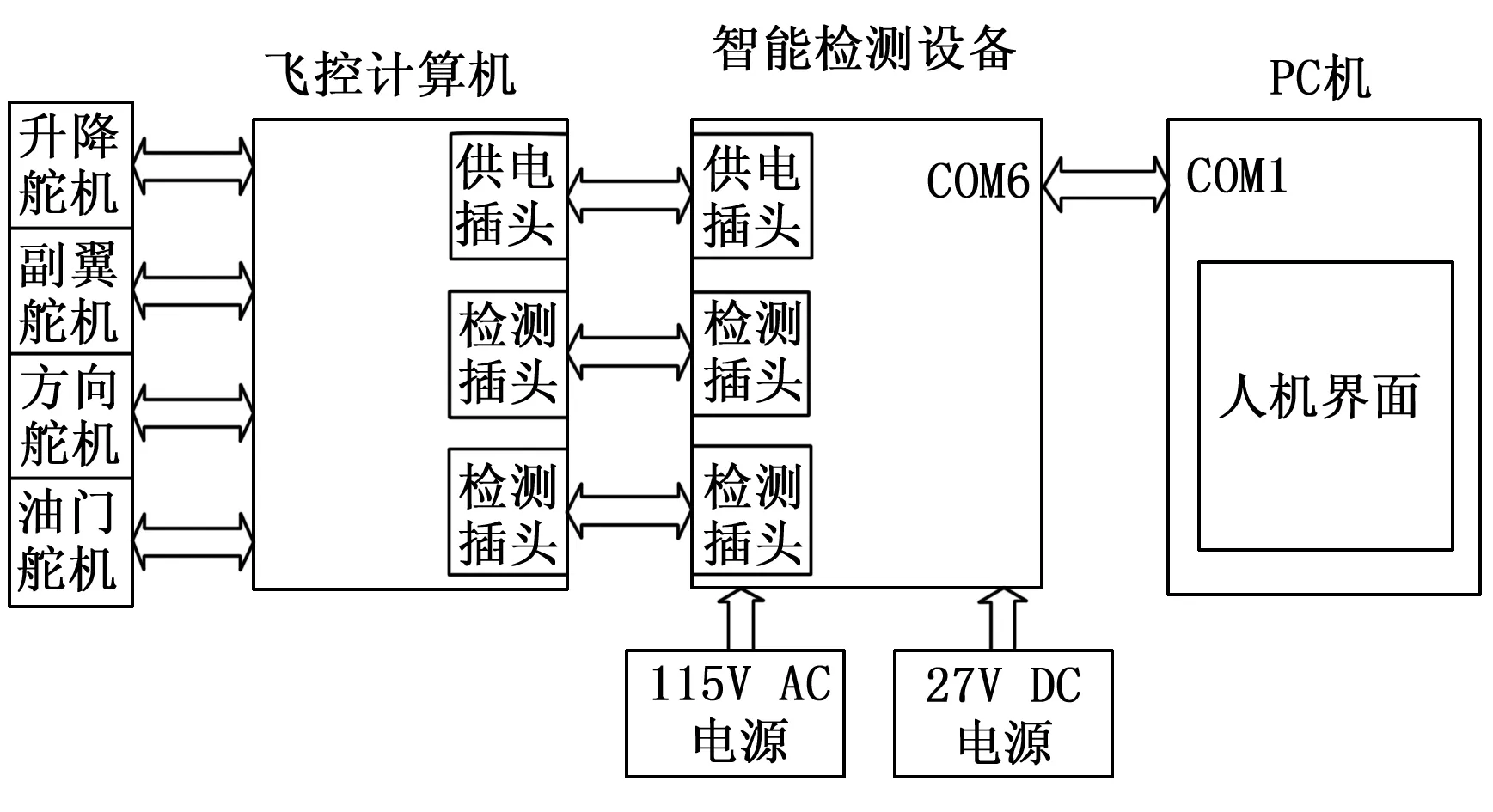
图6 系统联机调试接线关系

表2 故障注入测试数据记录
由表2可以看出,飞控计算机注入的故障都能被智能检测系统准确定位,且单次的检测时长都在3 min以内。而如果要人工进行相同的测试项目,单次检测时长都在6 min以上。
经过系统联机调试表明:系统各项功能表现良好,能够准确、实时对飞控计算机进行自动检测,实现了系统设计预期的全部功能需求。
6 结束语
飞控计算机则是飞控系统的大脑,因此对飞控计算机的功能进行全自动检测、排除故障是无人机系统正常运行的保障。本文设计的基于586-Driver的无人机飞控计算机智能检测系统,当飞控计算机出现信号异常或故障时,能够进行全功能、自动快速检测,满足某型飞控计算机的检测需求,极大地节省了时间、解放了人力,在实际应用中取得了良好的实际效果。
[1] 钟 志. 分布式无人机自动检测系统的研究与设计[D]. 南京: 南京航空航天大学, 2004.
[2] 王向民.无人机地面综合检测系统的研究[D].南京:南京航空航天大学, 2003.
[3] 胡 琴. 电气自动检测技术的现状与发展. 硅谷] 黄文群. 数字接收机中信号检测及自适应门限技术研究[D]. 重庆: 重庆大学, 2010.
[5] 李 昕, 杨 睿. 基于586-Engine的无人机飞控系统的设计与实现[J]. 航空电子技术, 2008 (2).
[6] 李 强, 李志宇, 高艳辉. 基于UR8的586-Engine异步串行通信扩展设计[J]. 电子设计工程, 2015 (13): 105-107.
[7] 翟亚东, 史忠科. 基于CF卡的飞行试验数据记录器的设计[J]. 计算机测量与控制, 2006,(10):1384-1386.
[8] 李 昕, 方 挺. 基于586-Engine的无人机飞行控制器设计[J]. 世界电子元器件, 2008: 78-81.
[9] 郝允冉, 黄一敏, 史拥军. 基于586-Engine的高性能飞行控制器设计与实现[J]. 微计算机信息,2007: 16-8.
[10]梁洁玫,衣学慧, 李军予, 等. 高性能微控制器在控制计算机技术中的应用[J]. 控制工程 (北京), 2005 (2): 24-29.
DevelopmentofUAVFlightControlComputerAutomaticDetectionSystemBasedon586-Driver
Gao Yanhui1, Xiao Liping1, Li Qiang2, Li Zhiyu1
(1.Ministerial Key Laboratory of Unmanned Aerial Vehicle Technology,Nanjing University of Aeronautics and Astronautics,Nanjing 210016, China; 2.Department of Automation, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
The most traditional detection of flight control computer of unmanned aerial vehicle (UAV)is manual operation, with cumbersome operation, large amount of data, vulnerable to human factors, resulting in low test efficiency, the results of subjective, lack of security.A one-button full-function detection scheme for flight control computer based on signal threshold automatic detection technology isproposed. A smart system of automatic detection is developed with 586-Driver board as the core. The interface board, power board, signal conditioning board and detection board are designed.Module function include the underlying drive, timing control, power control and current detection, functional testing, which realizes the sequential testing of the flight control computer without manual operation. The system test was carried out by using man-made fault test method. The test result shows: the system meets the requirement of detection,the efficiency of detection of UAV flight control computer is improved.
flight control computer; 586-Driver; automatic detection; signal threshold detection
2017-02-14;
2017-03-10。
高艳辉(1976-),男,河北辛集人,硕士,助理研究员,主要从事无人机飞控系统方向的研究。
1671-4598(2017)10-0004-03
10.16526/j.cnki.11-4762/tp.2017.10.002
V249
A
猜你喜欢
汽车实用技术(2022年4期)2022-03-07
兵器装备工程学报(2020年3期)2020-04-22
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
军事文摘(2020年24期)2020-02-06
电子制作(2019年20期)2019-12-04
红土地(2019年10期)2019-10-30
电子制作(2019年10期)2019-06-17
火力与指挥控制(2019年4期)2019-06-14
电子制作(2019年7期)2019-04-25
电子制作(2018年19期)2018-11-14